Applications des lois de Newton et de Kepler

Lycée Paul CEZANNE – Aix-en-Provence Terminale S – Réforme 2012 http://www.stardustlabs.fr
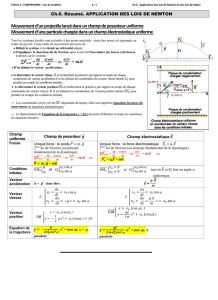
Partie II - Comprendre 06 – Application des lois de Newton et des lois de Kepler
Une balle, de centre de gravité G et de masse m, est lancée dans le champ de pesanteur terrestre. On se
limitera à l’étude de son centre de gravité.
a. Définition du système et choix du référentiel
Toute étude de mouvement nécessite, pour commencer, de définir le système et de choisir le
référentiel adapté.
Dans le cas d’une balle lancée à la surface de la Terre :
Le système étudié est la balle, modélisée par son centre de gravité G ;
Le référentiel choisi est le référentiel terrestre supposé galiléen.
L’étude se fera dans le repère orthonormé d’espace
O,i, j,k
tel que la vitesse initiale
0
v
soit dans le plan
O,i, j
:
b. De la deuxième loi de Newton à l’accélération
L’application de la deuxième loi de Newton nécessite de faire l’inventaire des forces extérieures exercées sur le
système.
Les forces extérieures exercées sur le centre de gravité G de la balle sont :
Le poids
P
de la balle ;
Les forces exercées par l’air sur la balle
air / B
F
(mais celles-ci sont négligeables).
Dans le référentiel terrestre supposé galiléen, d’après la deuxième loi de Newton :
dp
Fdt
La masse de la balle ne variant pas au cours du temps, on peut écrire :
d m.p
d p dv
F m. m.a
dt dt dt
On a donc la relation suivante :
F P m.a m.g m.a g a
Dans le repère
O,i, j,k
les coordonnées de g et de a s’écrivent :
0
gg
0
et
x
y
z
a0
a a g
a0
x
y
z
α
O

Lycée Paul CEZANNE – Aix-en-Provence Terminale S – Réforme 2012 http://www.stardustlabs.fr
Partie II - Comprendre 06 – Application des lois de Newton et des lois de Kepler
c. De l’accélération à la vitesse
L’accélération
a
est la dérivée de la vitesse
v
par rapport au temps :
dv
adt
soit
x
xdv
adt
,
y
y
dv
adt
et
z
zdv
adt
La détermination du vecteur vitesse nécessite de rechercher la primitive par rapport au temps de
chaque coordonnée du vecteur accélération, sans oublier de tenir compte des coordonnées du
vecteur vitesse initiale
0
v
.
Point de mathématiques :
Soit f une fonction définie sur un intervalle I. Une primitive par rapport au temps de f sur I est une fonction F
dérivable sur I telle que :
tI
F' t f t
Dans le repère
O,i, j,k
les coordonnées de
v
s’écrivent :
xx
yy
zz
vC
v v g.t C
vC
Or la vitesse initiale (pour
t0
) vérifie ces coordonnées :
xx
0 y y
zz
vC
v v 0 C
vC
0x 0
0 0 y 0
0z
v v .cos
v v v .sin
v0
Par identification on a
x0
C v .cos
,
y0
C v .sin
et
z
C0
, donc
x0
y0
z
v v .cos
v v g.t v .sin
v0
.
Au cours du mouvement, la coordonnée
z
v
est nulle en permanence, le mouvement s’effectue donc dans le plan
O,i, j
.
d. De la vitesse à la position
La vitesse
v
est la dérivée du vecteur position
OG
par rapport au temps :
dOG
vdt
soit
xdx
vdt
,
ydy
vdt
et
zdz
vdt
La détermination du vecteur position nécessite de rechercher la primitive par rapport au temps de
chaque coordonnée du vecteur vitesse, sans oublier de tenir compte des coordonnées du vecteur
position initiale
0
OG
.
Dans le repère
O,i, j,k
les coordonnées de
OG
s’écrivent :
0x
20y
z
x v .cos t C'
1
OG y .g.t v .sin t C'
2z C'
Or la position initiale est
0
x0
OG y 0
z0
donc
0
20
x v .cos t
1
OG y .g.t v .sin t
2z0
Les coordonnées du vecteur position dépendent du temps, on les appelle « équations horaires ».

Lycée Paul CEZANNE – Aix-en-Provence Terminale S – Réforme 2012 http://www.stardustlabs.fr
Partie II - Comprendre 06 – Application des lois de Newton et des lois de Kepler
e. De la position à la trajectoire
Pour déterminer l’équation de la trajectoire, il faut combiner les équations horaires afin d’éliminer le temps.
On exprime t en fonction de x :
0
x
tv .cos
Ensuite on réinjecte l’expression du temps dans l’équation horaire de y :
2
0
00
1 x x
y .g. v .sin
2 v .cos v .cos
2
2
0
g
y x tan x
2 v .cos
L’équation de la trajectoire obtenue est une fonction polynôme du second degré, c’est l’équation d’une
parabole.
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0 0,2 0,4 0,6 0,8 1 1,2
y
x
Une particule M, supposée ponctuelle, de charge électrique q et de masse m, est placée dans un champ
électrostatique uniforme
E
.
a. Définition du système et choix du référentiel
Système étudié : la particule chargée M
Référentiel d’étude : référentiel terrestre supposé galiléen
L’étude se fera dans le repère orthonormé d’espace
O,i, j,k
tel que la vitesse initiale
0
v
soit dans le plan
O,i, j
:
x
y
z
α
O

Lycée Paul CEZANNE – Aix-en-Provence Terminale S – Réforme 2012 http://www.stardustlabs.fr
Partie II - Comprendre 06 – Application des lois de Newton et des lois de Kepler
b. De la deuxième loi de Newton à l’accélération
L’application de la deuxième loi de Newton nécessite de faire l’inventaire des forces extérieures exercées sur le
système. Le mouvement est plan, on se limitera à l’étude dans le plan
O,i, j
.
Les forces extérieures exercées sur la particule M sont :
Le poids
P
de la particule ;
Les forces exercées par l’air sur la particule
air / M
F
;
La force électrostatique
e
F
.
Les forces exercées par l’air ainsi que le poids sont négligeables en regard de la force électrostatique.
Dans le référentiel terrestre supposé galiléen, d’après la deuxième loi de Newton :
dp
Fdt
La masse m est constante, on peut écrire :
d m.p
d p dv
F m. m.a
dt dt dt
On a donc la relation suivante :
eq
F F m.a q.E m.a a E
m
Dans le repère
O,i, j
les coordonnées de E et de a s’écrivent :
0
EE
et
x
y
a0
aq.E
am
c. De l’accélération à la vitesse
Dans le repère
O,i, j
les coordonnées de
v
s’écrivent :
xx
yy
vC
vq.E
v t C
m
x0
y0
v v .cos
vq.E
v t v .sin
m
d’après les conditions initiales.
d. De la vitesse à la position
Dans le repère
O,i, j
les coordonnées de
OM
s’écrivent :
0x
20y
x v .cos t C'
OM q.E
y .t v .sin t C'
m
Et avec les conditions initiales :
0
20
x v .cos t
OM q.E
y .t v .sin t
m
e. De la position à la trajectoire
0
2
0
00
x
tv .cos
1 x x
y .g. v .sin
2 v .cos v .cos
2
2
0
g
y x tan x
2 v .cos
L’équation de la trajectoire obtenue est une fonction polynôme du second degré, c’est l’équation d’une
parabole.

Lycée Paul CEZANNE – Aix-en-Provence Terminale S – Réforme 2012 http://www.stardustlabs.fr
Partie II - Comprendre 06 – Application des lois de Newton et des lois de Kepler
On étudie le mouvement d’un satellite S de masse m, assimilé à un point matériel, en orbite autour de la Terre
de masse
T
M
et de centre O. on se place dans l’approximation d’une orbite circulaire de rayon
r OS
.
Le repère de Frénet :
C’est un repère lié au satellite S, il est donc mobile. Le premier vecteur unitaire,
t
, est tangent à la trajectoire
et orienté dans le sens du mouvement.
Le deuxième vecteur unitaire,
n
, est perpendiculaire à
t
et orienté vers le centre de courbure.
Inventaire des forces extérieures :
La force gravitationnelle
T / S
F
exercée par la Terre sur le satellite ;
Les forces gravitationnelles exercées par les autres astres (planètes, Soleil, etc.) sont négligeables ;
Les forces de frottement exercées par l’atmosphère sur le satellite (négligeables aussi).
D’après la deuxième loi de Newton :
T / S
F F m.a
Les coordonnées de l’accélération et la force gravitationnelle dans la base de Frénet sont :
T
N
a
aa
et
T / S T
2
0
Fm.M
G. r
, il en découle que
T
TN
2
0a
m.
m.M a
G. r
c’est-à-dire
T
T
N2
a0
aG.M
ar
Or
Tdv
a0
dt
ce qui implique que la vitesse a une valeur constante : le mouvement est circulaire uniforme.
D’autre part l’accélération normale
2T
N2
G.M
v
arr
ce qui permet de trouver une expression pour la vitesse :
2TT
G.M G.M
vv
rr
On voit ici que la vitesse ne dépend pas de la masse du satellite, mais uniquement de la masse de l’astre autour
duquel il gravite ainsi que la distance à laquelle il se trouve de cet astre.
Déterminons maintenant la période de révolution du satellite :
3
T
T
G.M
2 .r r
v T 2
T r G.M
Là encore, la période ne dépend que de la masse de l’astre et de la distance à laquelle se trouve le satellite.
Ce résultat peut être généralisé à tout corps qui gravite en orbite circulaire autour d’un autre corps (planètes
autour du Soleil ou d’une autre étoile, satellites autour d’une planète, etc.).
S
r
O
 6
7
6
7
1
/
7
100%