TD DYN1.2 - TSI Ljf.html

DYN Dynamique TD DYN-1.2 Maxpid
Lycée Jules Ferry
Page 1 sur 4
TSI2
1 Présentation du problème technique
On se propose d'étudier les performances de l'axe Maxpid à partir de la commande en trapèze de
vitesse par défaut d'une part, de quantifier l'influence de masses supplémentaires d'autres part et
enfin d'optimiser les paramètres d'accélération par rapport aux performances du moteur.
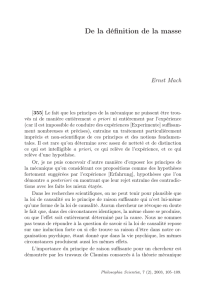
Paramétrages des mouvements:
Figure 1 : paramétrage de la cinématique
Valeurs numériques:
- pas de la vis : p=4 mm
- distance entre le centre de rotation et le centre des masses additionnelles : d=24 cm
- masse additionnelle : 0,65 Kg donc pour 2 masses : m=1,3 Kg
- caractéristiques du moteur :
Tension d'alimentation Ua 24
V
Vitesse de rotation à vide 4300
tr/min
Couple au courant In 113
mN.m
Courant nominal In 2,15
A
Couple de démarrage à Ua 240
mN.m
Courant de démarrage à Ua 11,6
A
Constante de couple Kc 52,5
mN.m/A
Constante de vitesse Ke 182
tr/(min.V)
Hypothèses:
-
Les liaisons sont supposées parfaites,
-
L'inertie des éléments mobiles autres que celle du bras et de ses masses additionnelles est
supposée négligeable,
-
le déplacement se fait dans le plan horizontal et le poids est dirigé selon –
.

DYN Dynamique TD DYN-1.2 Maxpid
Lycée Jules Ferry
Page 2 sur 4
TSI2
2 Etude cinématique
Loi entrée-sortie :
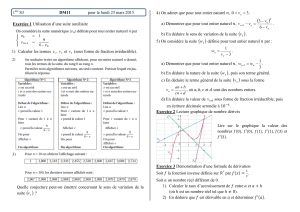
Une étude cinématique montre que la loi entre l'angle d'entrée β (angle de rotation de la vis par
rapport au stator du moteur) et l'angle de sortie θ (angle de rotation du bras par rapport au bâti)
n'est pas tout à fait linéaire (surtout pour 0°< θ<30°).
On se propose donc de réaliser notre étude pour 40°<θ<60°.
Figure 2 : Angle de rotation θ (rad) du bras en fonction de l'angle de rotation β (10² rad) de la vis.
1) A partir de la courbe précédente, déterminer la loi d'entrée-sortie sur la feuille réponse.
Loi de commande
On se propose d'étudier le comportement dynamique du système dans le cas d'une loi de
commande en trapèze. Les paramètres par défaut dans le logiciel de commande sont :
= 7,7 rad/s
2
= 1,5 rad/s
sont respectivement les vitesses et accélérations du bras par rapport au bâti (la position
du bras étant la grandeur asservie).
2) Tracer l'allure des lois de commandes des accélérations, vitesses et positions sachant que
la vitesse est une loi de commande en trapèze.
3) En déduire les durées des phases d'accélérations et du mouvement uniforme dans le cas
où le bras passe de 40° à 60°.
4) Compléter les tracés précédant en indiquant les grandeurs caractéristiques (durées,
positions initiale et finale, vitesse maximale et accélérations).
Vitesse du bras
5) Tracer les figures planes permettant de définir les relations entre les repères :
-
lié au bâti 1,
-
lié au bras 5.
6) Donner l'expression de la vitesse
du point D de 5 par rapport au bâti 1 en fonction de
d, Ω et des vecteurs de base.
7) En déduire l'accélération
du point D de 5 par rapport au bâti 1 en fonction de d, Ω et
des vecteurs de base.

DYN Dynamique TD DYN-1.2 Maxpid
Lycée Jules Ferry
Page 3 sur 4
TSI2
3 Etude dynamique
On se propose de déterminer dans cette partie l'impact des effets de l'inertie sur le couple moteur.
Torseur dynamique :
8) Vue la faible épaisseur des masses additionnelles placées en D, on va faire l'hypothèse de
masses ponctuelles. En déduire le torseur dynamique de ces masses en leur centre de
gravité D (Remarque : le moment dynamique au centre de gravité d'une masse ponctuelle
est nul).
9) En déduire le torseur dynamique au point A. En déduire le moment inertie J
A,m
de la masse
m ramenée à l'axe de rotation du bras (A,z) et comparer cette valeur avec celle du bras
!
"#
$%&
'
. Conclure sur la possibilité de négliger un des termes.
Torseur dynamique :
10) Faire le bilan, sous forme de torseurs, des actions mécaniques extérieures au bras et à ses
masses additionnelles. L'action de l'écrou sur le bras sera notée ()
*+
,-.
*
!
! !
! /
*
0
1
2
Principe fondamental de la dynamique :
11) Appliquer le principe fondamental de la dynamique à l'ensemble {5 + m} et déterminer
l'intensité du couple /
*
à appliquer au bras 5.
12) Donner la relation entre le couple /
*
à appliquer au bras et le couple moteur 3
'#
exercé
par le stator 2 sur la vis d'entrainement 3 .
13) En déduire si le couple moteur 3
'#
est compatible avec les caractéristiques du moteur.
Conclure.

DYN Dynamique TD DYN-1.2 Maxpid
Lycée Jules Ferry
Page 4 sur 4
TSI2
Document réponse
CINEMATIQUE
1)Loi entrée-sortie : pour 4!56756!5, en radians 67
8
6 d'où 9
:
;
2)3)4) Loi de commande en trapèze :
5) Figures planes
6) Vitesse
=
7) Vitesse
=
DYNAMIQUE
8) Torseur dynamique en D
<=
>
9) Torseur dynamique en A
<=
>
10) Torseurs des actions mécaniques extérieures :
()
*+
,-.
*
!
! !
! /
*
0
1
2
()
?+@
,A
B
?@
C
C C
C D
?@
E
FG
H
()
?+@
,A
B
?@
C
C C
C D
?@
E
FG
H
11) PFD appliqué à 5 :
12) Relation entre les couples en entrée I
HJ
et en sortie D
?@
de transmission :
13) Conclusion sur le dimensionnement du moteur
7
A
ccélération
Vitesse
Position
1
/
4
100%