17. ISOMÉTRIES LINÉAIRES Une application linéaire est une

17. ISOMÉTRIES LINÉAIRES
17.1. Isométries linéaires dans un espace vectoriel euclidien
Soit E un espace vectoriel euclidien. Une application linéaire f dans E est appelée
isométrie linéaire ssi , quel que soit l’élément m de E , on a || f (m) || = || m || , autrement dit,
ssi f conserve la norme dans E .
Exemples :
L’identité idE dans E et l’application s : m a - m sont des isométries linéaires de E . En effet ces deux
applications sont linéaires. De plus on a || idE(m) || = || m || et || s(m) || = || - m || = || m || , CQFD.
17.1.1. Propriétés des isométries linéaires
i ) Une application linéaire f de E est une isométrie ssi elle conserve le produit scalaire.
• En effet : f conserve le produit scalaire ssi quels que soient u et v de E , on a f (u) • f (v) = u • v .
S’il en est ainsi || f (u) ||2 = f (u) • f (u) = u • u = || u ||2 . Donc || f (u) || = || u || et f conserve également la norme.
• Réciproquement on sait que 2 u • v = || u + v ||2 − || u ||2 − || v ||2 . Donc si f conserve la norme on a :
2 f (u) • f (v) = || f (u) + f (v) ||2 − || f (u) ||2 − || f (v) ||2 = || f (u + v) ||2 − || f (u) ||2 − || f (v) ||2 = || u + v ||2 − || u ||2 − || v ||2
= 2 u • v . Donc f (u) • f (v) = u • v et f conserve également le produit scalaire.
ii ) Une application linéaire f de E est une isométrie ssi elle conserve la distance.
• En effet d (a , b) = || b −
−−
− a || , donc si f conserve la norme, alors d (f (a) , f (b)) = || f (b) − f (a) || = || f (b − a) ||
= || b − a || = d (a , b) c. -à-d. f conserve la distance.
• Réciproquement si f conserve la distance, alors || f (u) || = || f (u − 0E) || = || f (u) − f (0E) || = d (f (u) , f (0E))
= d (u , 0E) = || u || , c. -à-d. f conserve également la norme.
En résumé:
Une application linéaire est une isométrie
• ssi elle conserve la norme ,
• ssi elle conserve le produit scalaire ,
• ssi elle conserve la distance .
iii ) Une isométrie linéaire f de E conserve l’orthogonalité.
En effet si u ⊥ v alors u • v = 0 , donc f (u) • f (v) = 0 , car f conserve le produit scalaire, c. -à-d. f (u) ⊥ f (v) .
iv ) Une isométrie linéaire f de E est une bijection dans E .
En effet si f (m) ∈ Ker (f ) alors f (m) = 0E et, comme f (0E) = 0E , il vient f (m) = f (0E) .
On en déduit que || f (m) || = || f (0E) || et, comme f conserve la norme , || m || = || 0E || = 0 , c. -à-d. m = 0E .
Donc Ker (f ) = {0E} et f est injective, donc aussi surjective. C’est donc bien une bijection dans E .
v ) La composée de deux isométries linéaires est une isométrie linéaire.
En effet la composée g o f de deux applications linéaires f et g est linéaire. Si en plus ce sont des isométries,
on a : || g o f (m) || = || g(f (m)) || = || f (m) || = || m || .
vi ) Toute isométrie linéaire f possède une application réciproque f -1 , qui est elle-même
une isométrie linéaire.
En effet f est bijective, donc elle possède une réciproque f -1 qui, comme f , est linéaire.
Pour tout m on a alors f o f -1(m) = m , donc || f o f -1(m) || = || m || . Comme f est une isométrie,

on a aussi || m || = || f o f -1(m) || = || f (f -1(m)) || = || f -1(m) || ce qui montre que || f -1(m) || = || m || .
Donc f -1 est bien une isométrie linéaire.
Les isométries linéaires de E sont aussi appelées transformations orthogonales .
Leur ensemble Is est aussi noté O(E) . Comme la loi o est associative, mais non
nécessairement commutative, ce qui précède montre que :
( O(E) , o ) est un groupe non commutatif
appelé groupe orthogonal de E .
17.1.2. Isométries linéaires et bases orthonormées
Soit E un espace vectoriel euclidien de dimension n . Soit B une base orthonormée de E .
• Si f est une transformation orthogonale de E , alors f transforme la base orthonormée B en une base
orthonormée f (B) . En effet si u est un vecteur de B alors || u || = 1 donc || f (u) || = 1 , car f conserve la
norme et , si u et v sont deux termes distincts de B , alors u ⊥ v donc f (u) ⊥ f (v) , car f conserve
l’orthogonalité.
On en conclut que f (B) est une base orthonormée.
• Réciproquement soit dans E une application linéaire f qui transforme la base orthonormée
B = (i , j , k , K
KK
K) en une base orthonormée B' = (i' , j' , k' , K
KK
K) , avec f (i) = i' , f (j) = j' , f (k) = k' , K
KK
K .
Soit m = xi + yj + zk + L
LL
L . On a f (m) = f (xi + yj + zk + L
LL
L) = xf (i) + yf (j) + zf (k) + L
LL
L = xi' + yj' + zk' + L
LL
L
et comme B et B' sont orthonormées, || m ||2 = x2 + y2 + z2 + L = || f (m) ||2 , donc f est une isométrie.
Une application linéaire est une isométrie ssi elle transforme
une base orthonormée en une base orthonormée
17.2. Bases orthonormées dans un plan vectoriel euclidien
Dans tout ce qui suit, E est un plan vectoriel euclidien rapporté, à une base orthonormée
B = (e1 , e2) , et muni d’une orientation définie par la forme bilinéaire alternée Ψ , telle que
Ψ(e1 , e2) = 1 , c. -à-d. telle que (e1 , e2) est une base directe.
17.2.1. Vecteurs orthogonaux ayant même norme
Pour tout point u non nul de E , il existe deux points v' et v" orthogonaux à u et ayant
même norme que u . Les bipoints (u , v') et (u , v") ont des orientations contraires.
En effet : Soit u = αe1 + βe2 un élément de E . Cherchons v = α'e1 + β'e2 tels que u ⊥ v et || u || = || v ||
c. -à-d. tels que α'α + β'β = 0 et α'2 + β'2 = α2 + β2 . Comme u =/ 0E , l’un au moins de α , β est non nul.
• Si β =/ 0 alors il existe λ tel que α' = λβ et α'α + β'β = 0 devient λβα + β'β = 0 donc β' = - λα .
• Si α =/ 0 alors il existe λ tel que β' = - λα et α'α + β'β = 0 devient α'α − λαβ = 0 donc α' = λβ .
Ainsi dans les deux cas il existe un réel λ tel que α' = λβ et β' = - λα . L’égalité α'2 + β'2 = α2 + β2 devient
alors λ2(α2 + β2) = α2 + β2 donc λ2 = 1 d’où λ = 1 ou λ = -1 .
On a donc soit α' = β et β' = - α soit α' = - β et β' = α . Donc (α' , β') = (- β , α) ou (α' , β') = (β , - α) .
Il y a donc pour v deux solutions possibles : v' = - βe1 + αe2 et v" = βe1 − αe2 .
En plus Ψ(u , v') = Ψ(αe1 + βe2 , - βe1 + αe2) = (α2 + β2)·Ψ(e1 , e2) = α2 + β2
et Ψ(u , v") = Ψ(αe1 + βe2 , βe1 − αe2) = (- α2 − β2)·Ψ(e1 , e2) = - (α2 + β2) .
Donc (u , v') et (u , v") existent bien et ont des orientations contraires, CQFD.

17.2.2. Bases orthonormées dont le premier vecteur est donné
On est ramené au problème précédent, avec la condition supplémentaire : les vecteurs ont pour longueurs l’unité
c. -à-d. α2 + β2 = 1 . D’où les résultats suivants :
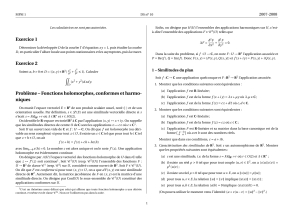
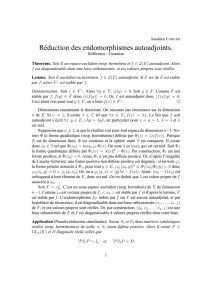
Soit B = (e1 , e2) une base orthonormée d’un plan vectoriel euclidien E ,
orienté par la forme bilinéaire alternée Ψ telle que Ψ(e1 , e2) = 1 .
Si u est le vecteur de E tel que (u)B =
α
β
, avec α2 + β2 = 1 , alors
il existe dans E deux bases orthonormées (u , v') et (u , v") avec
(v')B =
- β
α et (v")B =
β
- α
.
En plus Ψ((u , v')) = 1 et Ψ((u , v")) = -1 .
e
e1
2
u
v'
v"
0E
Figurations de B = (e1 , e2) , (u)B =
α
β , (v')B =
- β
α et (v")B =
β
- α
.
17.3. Isométries dans un plan vectoriel euclidien
Soit Is l’ensemble des isométries linéaires du plan vectoriel E rapporté à la base orthonrmée B = (e1 , e2) .
• On sait que si f ∈ Is , alors f conserve la norme et l’orthogonalité, donc f transforme la base orthonormée
B en une base orthonormée.
• Réciproquement soit B' = (e'1 , e'2) une base orthonormée et f une application linéaire transformant B en
B' c. -à-d. telle que f (e1) = e'1 et f (e2) = e'2 .
Soit m = xe1 + ye2 un élément quelconque de E . Comme B est orthonormée, on a || m ||2 = x2 + y2 .
On a aussi f (m) = f (xe1 + ye2) = x f (e1) + y f (e2) = xe'1 + ye'2 car, par hypothèse, f est linéaire.
On en déduit que || f (m) ||2 = x2 + y2 car B' est par hypothèse également une base orthonormée.
Ainsi || f (m) ||2 = || m ||2 , c. -à-d. f conserve la norme. C’est donc une isométrie linéaire.
Dans un plan vectoriel euclidien, une application linéaire f
est une isométrie linéaire ssi
f transforme une base orthonormée en base orthonormée.

Pour définir une isométrie linéaire f , il suffit donc de choisir f (e1) et f (e2) de façon que ( f (e1) , f (e2)) soit
une base orthonormée. A condition qu’il soit unitaire, f (e1) peut être choisi arbitrairement : Cela veut dire que
si u est un élément quelconque du cercle unitaire de E , c. -à-d. s’il est de la forme u = ae1 + be2 avec
a2 + b2 = 1 , alors on peut donc prendre f (e1) = ae1 + be2 . On a alors deux choix possibles pour f (e2) :
Ou bien f (e2) = be1 − ae2 , ou bien f (e2) = - be1 + ae2 , ce qui donne deux possibilités pour la matrice de f :
Elle est soit de la forme
a b
b - a , soit de la forme
a - b
b a , naturellement avec a2 + b2 = 1 .
Remarquons que les déterminants de ces deux matrices valent respectivement -1 et +1 .
On désignera par O-(E) l’ensemble des applications f dont la matrice est de la première forme : elles changent
l’orientation des bipoints. Si la matrice de f est de la deuxième forme,
f conserve l’orientation des bipoints. On désignera par O+(E) l’ensemble de ces applications.
On a naturellement O-(E) ∪ O+(E) = O(E) et O-(E) ∩ O+(E) = ∅ .
( O(E) , o ) est un groupe non commutatif.
En effet o est une loi de composition interne dans Is car la composée de deux isométries linéaires est une
isométrie linéaire. On sait que cette loi o est associative, que l’application idE qui est neutre pour la loi o ,
est élément de Is et que toute isométrie linéaire a une application réciproque qui est également une isométrie
linéaire. En plus on a
a b
b - a.
a' - b'
b' a' =
aa' + bb' ba' – ab'
ba' – ab' - aa' – bb' et
a' - b'
b' a' .
a b
b - a =
aa' – bb' ba' + ab'
ba' + ab' bb' – aa' ,
ce qui prouve que la loi o n’est pas commutative. En plus elles montrent que :
Si f ∈ O-(E) et f ' ∈ O+(E) , alors f o f ' ∈ O-(E) et f ' o f ∈ O-(E) .
17.4. Symétries orthogonales dans un plan vectoriel euclidien
La loi o n’est pas une loi de composition interne dans O-(E) .
En effet la composée f o f ' de deux éléments de O-(E) n’est pas un élément de O-(E) , car elle change deux
fois l’orientation des bipoints, ce qui revient à conserver cette orientation. Cherchons la nature de f o f .
Soit
a b
b - a la matrice de f . On a :
a b
b - a.
a b
b - a =
a² + b² ab
−
ab
ab
−
ab a² + b² =
1 0
0 1 , d’où f o f = idE .
f est donc involutive, i.e. f -1 = f . Donc f et f -1 échangent tous les deux e1 et f (e1) . Soit alors ∆ la
bissectrice du bipoint (e1 , f (e1)) . Comme e1 et f (e1) sont tous les deux unitaires, ∆ a pour vecteur directeur
u = e1 + f (e1) c. -à-d. (u)B =
1 + a
b et (f (u))B =
a b
b - a.
1 + a
b =
a + a² + b²
b + ba
−
ab =
1 + a
b = (u)B , ce qui
montre que u est invariant par f .
Il en résulte que tout point de ∆ est invariant par f . Soit alors e'1 un vecteur directeur unitaire de ∆ et
soit e'2 un vecteur tel que B' = (e'1 , e'2) soit une base orthonormée de E .
La base orthonormée (e'1 , e'2) est transformée par f en une base orthonormée (f (e'1) , f (e'2)) et comme
f (e'1) = e'1 , on a nécessairement f (e'2) = - e'2 , car f change l’orientation de (e'1 , e'2) .
Par rapport à la base B' , la matrice de f est donc
1 0
0 -1 , ce qui montre que f est la symétrie-droite linéaire
ayant pour axe la droite ∆ et pour direction la droite vectorielle orthogonale à ∆ . On l’appelle symétrie
linéaire orthogonale d’axe ∆ . Remarquons que si a est un point arbitraire et si a' = f (a) , alors le point
b = a + a' est invariant par f donc b ∈ ∆ . Or si b =/ 0E , alors b appartient à la bissectrice de (a , a') , ce qui
montre que l’axe de f est la bissectrice de (a , a') , à condition que a' =/ - a par exemple si (a , a') est libre.
Si f ∈ O-(E) alors f est une symétrie-axiale linéaire orthogonale.
L’axe de f est la bissectrice d’un couple libre (a , f (a)) quelconque.

Soit (a , b) un bipoint tel que || a || = || b || =/ 0 . Si a = - b , appelons D la médiatrice de (a , b) et f la symétrie
orthogonale d’axe D . Il est alors évident que f échange les deux points a et b . Si a =/ - b posons c = a + b .
Alors (0E , a , c , b) est un losange. Soit f la symétrie orthogonale ayant pour axe la droite vectorielle D
engendrée par c . Il est évident que D est la bissectrice de (a , b) et que f échange les deux points. Donc :
Si (a , b) un bipoint tel que || a || = || b || =/ 0 , alors il existe une
symétrie-axiale, linéaire orthogonale, échangeant les points a et b .
Pour trouver la matrice de f dans la base orthonormée B = (e1 , e2) il suffit de connaître f (e1) . Or f (e1) est tel
que f (e1) − e1 soit orthogonal à D et que f (e1) + e1 appartienne à D . Soit u un vecteur directeur de D .
Les deux conditions précédentes se traduisent par u • (f (e1) − e1) = 0 et det (u , f (e1) + e1) = 0 , et si on pose
α
β = (u)B et
a
b = (f (e1))B , alors ceci équivaut à
αa + βb = α
-βa + αb = β, d’où a = α 2 − β
2
α 2 + β
2 et b = 2αβ
α
2 + β 2 .
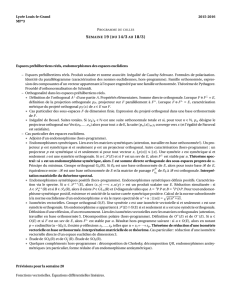
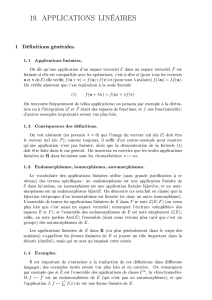
Soit B une base orthonormée d’un plan euclidien
et D une droite vectorielle de vecteur directeur v .
La symétrie linéaire orthogonale d’axe D , a pour matrice
a b
b - a , avec : a = α 2 − β 2
α 2 + β 2 , b = 2 α β
α 2 + β 2 et
α
β
= (v)B .
Figuration:
b
a
a+b
0
Uf( )
e1
e1
e2
D
17.5. Rotations linéaires dans un plan vectoriel euclidien
Soit O+(E) l’ensemble des isométries qui conservent l’orientation des bipoints.
Tout élément de O+(E) est appelé rotation linéaire.
Soit f et f ' deux rotations linéaires ayant pour matrices respectivement M =
a - b
b a et M' =
a' - b'
b' a' .
On a : M·M' =
a - b
b a .
a' - b'
b' a' =
aa'
−
bb' - ab'
−
ba'
ab' + ba' aa'
−
bb' et M'·M =
a' - b'
b' a' .
a - b
b a =
aa'
−
bb' - ab'
−
ba'
ab' + ba' aa'
−
bb' .
On vérifie sur les matrices que o est une loi de composition interne dans O+(E) mais également que
M·M' = M'·M , donc que f o f ' = f ' o f , ce qui prouve que o est commutative dans O+(E) .
Naturellement idE ∈ O+(E) puisque idE laisse invariant tout élément de E , donc conserve la norme des points
ainsi que l’orientation des bipoints. Enfin en faisant dans M' à la fois a' = a et b' = - b on constate que
M·M' = mat (idE) ce qui montre que f possède une réciproque f -1 dans O+(E) et qu’on obtient la matrice de
f -1 en remplaçant, dans la matrice de f , b par - b.
Comme en plus o est toujours associative, on peut énoncer :
( O+(E) , o ) est un groupe commutatif.
 6
7
8
6
7
8
1
/
8
100%