Résolution approchée des équations - Univers TI

Christian Vassard (IUFM Rouen)
13
Chapitre
Rares sont les équations en mathématiques que l’on peut effectivement résoudre. Les équations
polynomiales du premier et second degré sont particulièrement bien connues et étudiées. Pour le reste,
la situation se dégrade très vite ! Si l’on dispose effectivement de formules de résolution générale
pour les troisième et quatrième degrés, elles ne sont que très rarement utilisées dans la pratique, à
cause de leur complexité. Quant au cinquième degré, ou au-delà, on sait depuis Abel et Galois
qu’elles ne peuvent être résolues par radicaux… Sans parler bien sûr des équations non polynomiales,
pour lesquelles des méthodes générales de résolution n’existent que très rarement.
Autant dire qu’il est important, sinon essentiel, d’être capable de résoudre de façon approchée des
équations de type f(x) = 0, où f est une fonction réelle de variable réelle quelconque, que nous
supposerons dans tout ce chapitre continue sur son intervalle de définition.
Sommaire
Chapitre 13. Résolution approchée des équations ........................................... 265
1. Position du problème ............................................................................... 267
1.1 Introduction et notations ............................................................... 267
1.2 Quelles équations résoudre ? ...................................................... 267
1.3 Notre choix ...................................................................................... 270
2. Mise en jambe : la méthode de balayage ............................................ 271
3. Méthode de dichotomie ........................................................................... 272
3.1 La description de la méthode....................................................... 272
3.2 Mise en œuvre sur le tableur ....................................................... 274
3.3 La dichotomie par programme .................................................... 275
4. Méthode de Lagrange ou des parties proportionnelles ..................... 280
4.1 Le principe de la méthode de Lagrange .................................... 280
4.2 Une première approche ................................................................ 281
4.3 Cas d’une fonction à convexité constante ................................. 285
4.4 Un algorithme lorsque f’’f’ > 0 ...................................................... 293
Chapitre 13.
Résolution
approchée des
équations

266 Mathématiques et TI-Nspire
© T³ France 2010 / Photocopie autorisée
5. La méthode de Newton ........................................................................... 296
5.1 Le principe de la méthode de Newton ........................................ 296
5.2 Une première approche ................................................................ 297
5.3 Cas d’une fonction à convexité constante ................................. 300
5.4 Un algorithme lorsque f’’f’ > 0 ...................................................... 301
ANNEXE : Maximum et minimum d’une fonction.......................................... 303

Résolution approchée d’équations 267
© T³ France 2010 / Photocopie autorisée
1. Position du problème
1.1 Introduction et notations
Soit donc à résoudre de façon approchée une équation du type f(x) = 0, où f est une fonction définie et
continue sur un intervalle I de et à valeurs dans .
L’idée est de construire une suite, au moyen de diverses méthodes que nous allons étudier… suite
convergeant, de préférence rapidement, vers la solution cherchée.
On supposera de plus que l’étude de la fonction f a permis de déterminer un intervalle [a ; b] sur
lequel f est strictement monotone et change de signe
1
. Moyennant ces hypothèses, l’équation n’a
qu’une seule solution, notée
, sur l’intervalle [a ; b].
En isolant un intervalle [a ; b]. sur lequel n’existe qu’une seule solution à l’équation, on dit que l’on a
procédé à la séparation des racines.
1.2 Quelles équations résoudre ?
La résolution, même approchée, des équations est un problème essentiel que l’on rencontre dans tous
les domaines des mathématiques. Passons en revue quelques situations classiques.
Calcul de constantes célèbres
C’est la première idée qui vient : on calcule facilement les constantes mathématiques qui sont des
nombres algébriques
2
par la résolution d’équations polynomiales simples, à coefficients dans
.
Par exemple, en appliquant une méthode de résolution approchée aux équations x2 – 2 = 0 ou
x3 – 2 = 0, on obtiendra une valeur approchée de
2
ou
32
.
Remarquons d’ailleurs que ce n’est pas parce qu’on les désigne mathématiquement avec un radical
que l’on est plus avancé sur la valeur qu’ils ont
3
!
Une équation proposée par Léonard de Pise (ou Fibonacci 1175-1250).
Dans un court traité, Flos, « Fleurs de solutions de certaines questions relatives au nombre et à la
géométrie », Léonard de Pise résout vers 1225 quinze problèmes de nature algébrique
4
: treize du
premier degré, un du second et un du troisième. Il s’agit, nous dit l’auteur, « de questions épineuses
exposées d’une manière fleurie » : on appréciera la métaphore.
C’est bien sûr le problème du troisième degré, un de ceux proposés par l’Empereur, qui nous intéresse
ici : résoudre l’équation du troisième degré x3 + 2x2 + 10x = 20
5
.
Fibonacci en propose une solution comportant 9 décimales exactes, à une époque où les formules
générales de résolution
6
n’étaient pas connues :
x
1,368808107.
1
Autrement dit, f(a) × f(b) < 0.
2
C’est-à-dire solutions d’équations polynomiales à coefficients entiers.
3
Une notation comme
2
relève du calcul littéral pur et simple : ce n’est qu’une façon commode de désigner le nombre positif qui a pour
carré 2... On aurait pu l’appeler
et faire du calcul littéral avec cette lettre, en remplaçant partout
2 par 2. C’est d’ailleurs peu ou prou ce
que l’on fait avec
2
.
4
Dont trois avaient été proposés par l’Empereur Germanique Frédéric II.
5
Le 20 est dans le membre de droite pour éviter les nombres négatifs, qu’on n’appréciait pas à l’époque.
6
Elles furent mises en évidence à la Renaissance Italienne, au XVIe siècle, notamment par Jérôme Cardan.

268 Mathématiques et TI-Nspire
© T³ France 2010 / Photocopie autorisée
Construction de tables trigonométriques
On le sait peu, mais la construction d’une table trigonométrique, comme on le faisait avant la
démocratisation des calculatrices et même avant les séries
7
, passe par la détermination la plus précise
qui soit de la valeur de sin 1° : de cette valeur, on peut déduire toute la table avec les formules
d’addition.
Une des méthodes employées pour déterminer sin 1° consiste à résoudre de façon approchée une
équation polynomiale de degré 3
8
.
En effet, à partir de la relation trigonométrique bien connue :
sin 3x = 3 sin x – 4 sin3 x.
on peut déduire que sin 1°, dont on cherche la valeur, est solution de l’équation du troisième degré :
sin 3° = 3x – 4x3.
Tout le problème revient donc à calculer au préalable sin 3° de la façon la plus précise qui soit.
Paradoxalement, ce calcul ne pose pas un gros problème mathématique
9
.
En effet, on connaît de façon exacte, et donc aussi précise que l’on veut, les sinus et cosinus de 60° ou
72°… donc par différence les sinus et cosinus de 12° puis, par dichotomies successives – rappelons
les formules
1 cos2
sin 22
xx
et
1 cos2
cos 22
xx
– sin 6° et enfin sin 3°.
Le calcul exact de sin 3° peut de notre jour être mené de façon simple… grâce au calcul formel. Mais
le résultat que l’on obtient, bien que parfaitement exact, est à peu près inexploitable :
7
Encore que les séries soient de très mauvais outils calculatoires en fait !
8
C’est al-Kashi, autour de l’an 1400, qui propose cette méthode et en donne une résolution élégante et efficace par approximations
successives. Voir le chapitre suivant.
9
Mais un problème de temps, on s’en doute ! À l’époque, on ne reculait pas devant ces calculs pénibles et rébarbatifs. Et puis… on n’avait
pas le choix !

Résolution approchée d’équations 269
© T³ France 2010 / Photocopie autorisée
On mesure bien la difficulté de la détermination de sin 1°, à laquelle se sont heurtés ceux qui ont
voulu construire les premières tables trigonométriques. Poursuivre cette dichotomie nous fait passer
légèrement à côté de la valeur sin 1° que l’on cherche à atteindre : après 3°, on aurait ensuite les sinus
et cosinus de 1° 30’, puis de 45’. D’où l’enjeu de l’existence d’une méthode pour calculer sin 1°.
Le quatrième degré et le problème des échelles...
Les équations, même de degré plus élevé, peuvent intervenir là où on les attend le moins. Par
exemple, dans ce petit exercice « innocent », concret, mais dont la résolution fait intervenir une
équation polynomiale de degré 4.
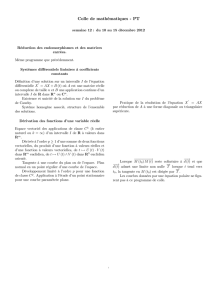
Deux échelles sont appuyées sur les deux murs opposés d'un couloir, comme sur la figure ci-contre.
L'une mesure 3 mètres de longueur l'autre 2 mètres. Sachant qu'elles se croisent à 1 mètre du sol, on
demande de calculer la largeur L du couloir.
Utilisons les notations de la figure ci-dessus. Trouver la largeur du couloir revient à connaître les
longueurs a et b.
Tout d’abord, d’après le théorème de Thalès appliqué aux triangles rectangles ABC et AED :
BC AB
DE AE
soit
b
da
.
De la même façon, on peut montrer que
a
cb
, ce qui permet de remarquer que d et c sont inverses
l’un de l’autre.
Exprimons maintenant GD2 en utilisant le théorème de Pythagore d’abord dans le triangle rectangle
GDC, puis dans le triangle rectangle GFD. On en déduit l’égalité :
22
4 1 9 1 cd
soit en remplaçant d par
1
c
:
22
12
4 2 1 9 1 cc cc
En multipliant des deux côtés par c2 (
0) on arrive à :
2 4 3 2 2 2
4 2 9 1 2 c c c c c c c
Soit finalement
4 3 2
2 5 2 1 0 c c c c
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
1
/
41
100%