Aucun titre de diapositive - Cégep de Lévis

Montage préparé par :
André Ross
Professeur de mathématiques
Cégep de Lévis-Lauzon
La droite dans R2

Introduction
Dans cette présentation, nous verrons comment obtenir l’équation
d’une droite de R2dont certaines caractéristiques sont décrites à
l’aide des vecteurs.
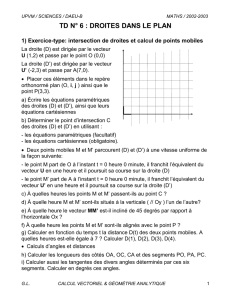
Pour décrire une droite de R2,on peut :
•donner un point et un vecteur
perpendiculaire à la droite (ou
vecteur normal);
•donner un point et un vecteur
parallèle à la droite (ou vecteur
directeur).

Vecteur normal
Vecteur normal
Définition
Un vecteur normal àune droite de R2est un vecteur perpen-
diculaire à cette droite. Nous le notons N.
Comme nous l’avons fait précédemment, nous emploierons parfois
la lettre grecque ∆(delta) pour désigner une droite.
Rappelons que, pour trouver l’équation d’une droite, on doit décrire
la condition à laquelle doit satisfaire un point pour être sur cette
droite. Dans les situations que nous allons présenter, cette condition
s’exprime àl’aide des vecteurs.

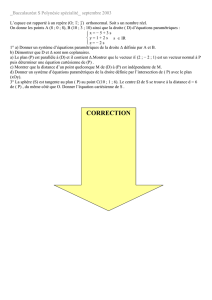
Équation d’une droite de R2
Considérons une droite dont on connaît un
point R(x1;y1)et un vecteur normal N= (a;b).
Pour qu’un point P(x;y) soit sur cette droite,
il faut que le vecteur RP soit perpendiculaire
au vecteur N.
N•RP = (a;b)•(x–x1;y–y1) = 0,
d’où :ax +by –ax1–by1= 0.
Un point et un vecteur normal sont donnés
On doit donc avoir :
Dans cette équation, –ax1–by1est une constante que l’on désigne
par c. On a donc une équation de la forme :
Réciproquement, on peut prouver que ax +by +c= 0 est l’équation
d’une droite perpendiculaire au vecteur N= (a;b).
ax + by + c= 0

Équation cartésienne d’une droite de R2
Équation cartésienne d’une droite de R2
Définition
Soit R(x1;y1),un point d’une droite ∆, et N= (a;b),un vecteur
normal à cette droite. On appelle équation cartésienne de la droite
l’équation :
Remarque :
Dans l’équation cartésienne de la droite, les coefficients des variables
représentent un vecteur normal à la droite.
ax + by + c= 0,
où c=–ax1–by1.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%