Document

2. Optimisation sans contrainte
Fonctions à une seule variable

2.1. Méthodes n’utililisant que les valeurs des
fonctions
•Méthode de Fibonacci
Hypothèse: La fonction fest définie sur l’intervalle [a, b] et est unimodal;
i.e., fne possède qu’un seul minimum local dans [a, b]

• L’approche consiste
–à choisir un certain nombre de points selon une stratégie basée sur les
nombres de Fibonacci
–à évaluer séquentiellement la valeur de la fonction à ces points
– avec l’objectif de réduire la longuer de l’intervalle contenant le
minimum local en se basant sur la propriété d’unimodalité de la
fonction

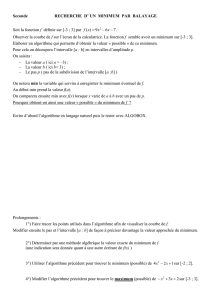
• Étant données les valeurs de la fonction en deux points de l’intervalle,
l’unimodalité permet d’identifier une partie de l’intervalle où le minimum
ne peut se retrouver
a a ab b bx1x1x1
x2x2x2
12
2
et
* ,
f x f x
x a x
12
1
et
* ,
f x f x
x x b
12
12
et
* ,
f x f x
x x x

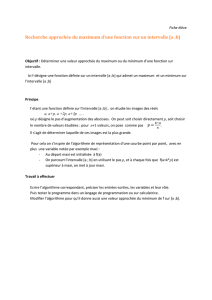
a bx1x2
x3x4
Choisir deux points x1et x2symétrique et à la même distance
de chaque extrémité de l’intervalle [a, b]
Choisir le prochain point symétriquement par
rapport au point déjà dans l’intervalle résultant.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
1
/
59
100%