Transparents en PPT

Détection et diagnostic par
combinaison d'un banc de filtres et
de l'algorithme séquentiel DCS
O. Mustapha1; M. Khalil1,2; G. Hoblos3;
H. Chafouk3; D. Lefebvre4
1Université Islamique du Liban
2Université Libanaise
3Ecole Supérieure d’Ingénieurs Généralistes
4Université du Havre
EXIT>



4
EXITMAIN MENU><
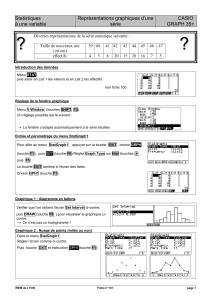
Formulation du problème de
détection
Le problème consiste à détecter une éventuelle rupture
dans des caractéristiques spécifiques du signal observé x(t)
et à estimer l'instant k de son apparition. Ce problème se
ramène à un test d'hypothèse.
Formulation du problème
050 100 150 200 250 300 350 400
-8
-6
-4
-2
0
2
4
6
8
H0: Θ =
Θ0
H1: Θ =
Θ1
H0: Θ = Θ0,Θ0(t) et H1: Θ = Θ1 ,Θ1(t)
Le problème revient à détecter le passage d'une distribution
Θ0(t) à la
distribution
Θ1(t).

5
EXITMAIN MENU><
Formulation du problème
détermine le degré de similarité de deux signaux
)0( )()/0(
)0/( Hp xpxHp
Hxp
)1( )()/1(
)1/( Hp xpxHp
Hxp
etSachant que:
0
)1( )0(
)0/( )1/(
1
)1( )0(
)0/( )1/(
Hx
Hp Hp
Hxp Hxp
et
Hx
Hp Hp
Hxp Hxp
Alors:
)0/( )1/(
)( Hxp Hxp
x
Le rapport de vraisemblance :
Formulation du problème de
détection
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
1
/
40
100%