Corrigé

U.F.R. de Mathématiques
Outils mathématiques pour
les sciences, M48, 2014–15
Corrigé de l’examen du 13 mai 2015
Ex 1. Séries entières (5 points)
1) On considère la série entière
`8
ÿ
k“0
p´3qk
5k`1zk.Déterminer son rayon de conver-
gence R.
On pose ak“ p´3qk{5k`1. Soit rě0, alors
lim
kÑ`8 |ak|rk“lim
kÑ`8
1
5ˆ3r
5˙k
“$
&
%
0si ră5{3,
1{5si r“5{3,
`8 si rą5{3.
On en déduit que le rayon de convergence de la série entière
`8
ÿ
k“0
p´3qk
5k`1zkest R“5{3.
2) Montrer qu’elle ne converge en aucun point de son cercle frontière (autrement
dit que si |z| “ R, la série diverge).
Soit zun complexe tel que |z| “ 5{3. Alors
lim
kÑ`8 ˇˇˇˇ
p´3qk
5k`1zkˇˇˇˇ
“lim
kÑ`8 ˇˇˇˇ
p´3qk
5k`1ˇˇˇˇ
ˆ |z|k“lim
kÑ`8
3k
5k`1ˆˆ5
3˙k
“1
5.
Le terme général de la série entière ne converge donc vers 0en aucun point du cercle
frontière : la série entière ne converge donc en aucun point du cercle frontière.
3) Calculer sa somme pour zPDp0, Rq, où Dp0, Rqdésigne le disque ouvert de
centre 0et de rayon Rdu plan complexe.
Soit zappartenant au disque ouvert Dp0,5{3q. On calcule alors la somme de la série
en utilisant la formule qui donne la somme d’une série géométrique convergente :
`8
ÿ
k“0
p´3qk
5k`1zk“1
5
`8
ÿ
k“0
p´3zqk
5k“1
5
`8
ÿ
k“0ˆ´3z
5˙k
“1
5ˆ1
1`3z{5“1
5`3z.
4) On note
gpzq “ 1
p3z`5qp1´zq.
Quel est l’ensemble de définition Dgde g? Vérifiez qu’il existe deux constantes aet b
telles que pour tout zPDg,
gpzq “ a
3z`5`b
1´z.

La fonction gest une fraction rationnelle, elle est donc définie sur le plan com-
plexe privé des points où son dénominateur s’annule, autrement dit sur Czt´5{3,1u. On
cherche maintenant s’il existe deux constantes aet btelles que pour tout zPDg,
1
p3z`5qp1´zq“a
3z`5`b
1´z.(1)
Comme a
3z`5`b
1´z“ap1´zq ` bp3z`5q
p3z`5qp1´zq“zp3b´aq`pa`5bq
p3z`5qp1´zq,
l’équation (1) équivaut donc au système 3b´a“0et a`5b“1, qui admet pour unique
solution a“3{8et b“1{8.
5) Utilisez cette décomposition pour donner un développement de gen série entière.
Quel est le rayon de convergence de ce développement ?
On vient d’établir que pour tout zPDg,
gpzq “ 1
8ˆ3
3z`5`1
1´z˙.
On sait que, pour |z| ă 1,1{p1´zqest la somme de la série géométrique complexe
standard ; on a un résultat analogue pour 1{p3z`5qlorsque |z| ă 5{3, d’après les
questions précédentes de l’exercice. On en déduit que pour |z| ă 1,
gpzq “ 1
8˜3
`8
ÿ
k“0
p´3qk
5k`1zk`
`8
ÿ
k“0
zk¸“1
8
`8
ÿ
k“0ˆ1´´´3
5¯k`1˙zk,
et cette égalité étant valable au moins pour les complexes ztels que |z| ă 1, ce dévelop-
pement a un rayon de convergence supérieur ou égal à 1. Comme par ailleurs
lim
kÑ`8 1´´´3
5¯k`1
“1,
le terme général de la série entière ne tend pas vers 0pour z“1, il n’y a donc pas
convergence de la série entière en 1: le rayon de convergence du développement obtenu
est donc exactement 1.
Ex 2. Q.C.M. (5 points)
On voudrait savoir si le système des Q.C.M. (Questionnaires à Choix Multiples)
favorise ou non les étudiants. Pour cela, on va modéliser « un élève moyen répondant à
un Q.C.M. », et essayer de se poser quelques questions pertinentes.
Pour chaque question du Q.C.M., quatre réponses sont proposées. On considère que la
probabilité qu’un étudiant moyen connaisse la réponse à une question donnée ne dépend
pas de celle-ci, et vaut pPs0,1r. Si il ne connaît pas la réponse, il répond au hasard.
2

1) Quelle est la probabilité que l’étudiant réponde correctement à une question
donnée ?
Pour répondre à cette question, on introduit les évènements suivants :
J= « l’étudiant répond correctement à une question donnée »
C= « l’étudiant connaît la réponse à cette même question »
D’après l’énoncé, PpCq “ pet PpJ|Ccq “ 1{4, puisque dans le cas où l’étudiant ne
connaît pas la réponse, il répond « au hasard », ce que l’on modélise par une loi uniforme
sur les quatre réponses proposées. En appliquant la formule de conditionnement par tous
les cas possibles, on peut alors écrire :
PpJq “ PpJ|CqPpCq ` PpJ|CcqPpCcq “ p`1
4p1´pq “ 1`3p
4,
où l’on s’est servi du fait que PpJ|Cq “ 1, autrement dit du fait que lorsque l’étudiant
connaît la bonne réponse, il répond correctement !
2) Sachant que l’étudiant a bien répondu à la question, quelle est la probabilité
qu’il ne connaissait pas la réponse ?
L’énoncé nous demande de calculer PpCc|Jq:
PpCc|Jq “ PpCcXJq
PpJq“PpJ|CcqPpCcq
PpJq“1´p
4ˆ4
1`3p“1´p
1`3p.
Le Q.C.M. est composé de vingt questions, et l’on suppose qu’elles sont assez variées
pour considérer que les réponses de l’étudiant sont indépendantes entre elles. Chaque
question est notée sur 1. On définit l’évènement Ak, pour kP t0,...,20u, par Ak“
« l’étudiant obtient la note k».
3) Calculer PpA20q.
On introduit les évènements Ji= « l’étudiant répond correctement à la i-ième ques-
tion », pour j“1,...,20. Alors A20 “J1X ¨ ¨ ¨ X J20, ce qui entraîne, en utilisant
l’indépendance des évènements Jiindiquée par l’énoncé, que :
PpA20q “ Pˆ20
Ş
i“1
Ji˙“
20
ź
i“1
PpJiq “ ˆ1`3p
4˙20
,
où la dernière égalité provient du fait que la probabilité qu’un étudiant connaisse la
réponse à une question donnée ne dépend pas de celle-ci, et donc la probabilité de
répondre correctement à la i-ième question ne dépend pas de i, autrement dit PpJiq “
PpJq.
4) Calculer PpAkq, pour kP t0,...,20u.
L’évènement Akest l’évènement « l’étudiant obtient la note k». Comme chaque ques-
tion vaut 1point, Akest aussi l’évènement « l’étudiant répond correctement à exacte-
ment kquestions sur les 20 ». On peut donc considérer que l’étudiant répète 20 fois
la même épreuve aléatoire, ces répétitions étant indépendantes les unes des autres, et
chaque épreuve a deux issues possibles : réussite ou échec, la probabilité de réussite étant
3

constante égale à p1`3pq{4. Le nombre de succès obtenus suit donc une loi binomiale
de paramètres 20 et p1`3pq{4, autrement dit, pour tout kP t0,...,20u,
PpAkq “ Ck
20 ˆ1`3p
4˙kˆ3p1´pq
4˙20´k
.
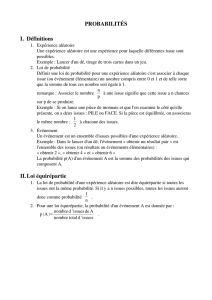
Ex 3. Interprétation du graphique d’une fonction de répartition (5 points)
La variable aléatoire Xa pour fonction de répartition Fdont le graphe est représenté
par la figure 1.
y
1
0,7
0,6
0,4
0,2
0
−4−2−6x
Figure 1 – Fonction de répartition F
1) Donner les valeurs des probabilités suivantes :
PpX“ ´6q, P pXě ´6q, P p´2ďXď0q, P p´6ăXă ´2q, P pXą ´2q.
‚PpX“ ´6q “ Fp´6q ´ Fpp´6q´q “ 0,4´0,2“0,2
‚PpXě ´6q “ 1´PpXă ´6q “ 1´Fpp´6q´q “ 1´0,2“0,8
‚Pp´2ďXď0q “ Fp0q ´ Fpp´2q´q “ 1´0,6“0,4
‚Pp´6ăXă ´2q “ Fpp´2q´q ´ Fp´6q “ 0,6´0,4“0,2
‚PpXą ´2q “ 1´PpXď ´2q “ 1´Fp´2q “ 1´0,7“0,3.
2) Que vaut PpXě0q? Que peut-on en déduire sur X?
PpXě0q “ 1´PpXă0q “ 1´Fp0´q “ 1´1“0,
la variable aléatoire Xest donc négative (presque sûrement).
4

3) La variable aléatoire Xest-elle à densité ?
La fonction de répartition d’une variable aléatoire à densité est une fonction conti-
nue sur R. La fonction de répartition Fdont le graphique est représenté Figure 1 est
clairement discontinue en ´6et ´2, elle n’est donc pas continue sur R: la variable
aléatoire Xn’est donc pas à densité.
Ex 4. Loi triangulaire (7 points)
On note fla fonction définie sur Rpar :
fptq “ $
’
’
’
&
’
’
’
%
0si tď0,
tsi 0ătď1,
2´tsi 1ătď2,
0si tą2.
1) Dessiner la représentation graphique de f.
012t
1
f(t)
Figure 2 – Représentation graphique de f
2) Vérifier que fest une densité de probabilité.
À partir du graphique de f, on constate que fest une fonction continue sur R, à
valeurs positives. De plus, l’aire entre l’axe des abscisses et le graphe de fse calcule ici
simplement, puisqu’il s’agit de l’aire d’un triangle de base 2et de hauteur 1: l’aire est
donc de 1, ce qui finit de prouver que fest une densité de probabilité sur R.
Dans toute la suite de l’exercice, Xdésigne une variable aléatoire de densité f.
3) Calculer PpXą3{2qet PpXď1q, et représenter ces probabilités sur le gra-
phique de f.
La loi de la variable aléatoire Xadmettant fpour densité, on a :
PpXą3{2q “ ż`8
3{2
fptqdt“ż2
3{2
p2´tqdt“ż1{2
0
tdt“„t2
21{2
0
“1
8,
5
 6
7
6
7
1
/
7
100%