TP de Ph ysique Objectifs du TP Documents utiles Travail à effectuer

Oscillateur Mécanique - MPSI 1 Lycée Chaptal - 2013
Oscillateur Mécanique
Méca . 1
TP de Physique
Objectifs du TP
•Faire le parallèle entre les oscillateurs électriques et mécaniques ;
•Savoir mesurer des grandeurs mécaniques à partir de signaux électriques ;
•Effectuer des mesures de « filtre » sur un système mécanique.
Documents utiles •Le chapitre sur le RHF.
Travail à effectuer
Pas de compte-rendu ! Le but de ce TP est d’étudier les oscillations mécaniques d’un système, d’abord libres
avec un amortissement fluide, puis forcées. Les calculs demandés sont d’EXCELLENTES révision d’élec, prenez le
temps d’essayez de les faire car nous allons le revoir en mécanique.
I - Oscillateur harmonique libre avec amortissement fluide - 1h
1. Rappels de l’étude théorique
1.1 - Mouvement libre non amorti
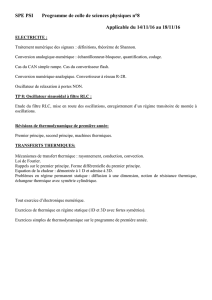
Soit un solide, assimilé à un point matériel de masse msuspendu à un ressort vertical de
raideur k, de longueur à vide ℓ0et attaché à un point fixe O. On note ℓ(t)la longueur à
l’instant tdu ressort. On définit l’écart à l’équilibre par y(t) = ℓ(t)−ℓe, où ℓeest la longueur
du ressort à l’équilibre. On montre (Très bon exercice de Terminale, essayez ! Et sinon, vous
devrez savoir le faire avec le cours de mécanique) que l’équation différentielle du mouvement
en régime libre md2y
dt2+ky = 0. La solution de cette équation différentielle est sinusoïdale
pure de pulsation propre ω0=k/m et la fréquence propre associée est f0=ω0/2π.
O
k
M
ℓ(t)
m
y
1.2 - Mouvement libre amorti
Un dispositif électromagnétique introduit une force de frottement fluide proportionnelle à la vitesse v, soit
Ffrot =−2λmv, avec λcoefficient d’amortissement positif. L’équation différentielle du mouvement libre s’écrit
alors d2y
dt2+ 2λdy
dt+ω0
2y= 0. On se limite au cas d’un faible amortissement, c’est-à-dire pour ω0> λ ; montrer
que la solution est de la forme y(t) = Ae−λt cos(Ωt+φ), où Aet Ωsont définies par les conditions initiales de
lancement. Donner l’expression de Ωen fonction de ω0et λ. Que vaut la pseudo-période T? Que vaut la loi de la
vitesse v(t)? Que peut-on alors dire de la pseudo-période de v(t)par rapport à celle de y(t)? En déduire la relation
entre le décrément logarithmique δde la vitesse v(t)et de la position y(t).
1

Oscillateur Mécanique
2. Étude du dispositif expérimental
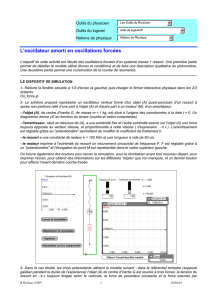
2.1 - Solide de masse m
C’est un aimant plein de forme cylindrique qui se déplace à l’intérieur d’un cylindre sur lequel sont bobinés
plusieurs enroulements indépendants C,B1,B2,B3.
2.2 - Capteur de vitesse
Il est constitué par la bobine Cde 500 spires. On la reliera à l’oscilloscope numérique TECTRONIX.
Description simple du phénomène : on admet que l’aimant en se déplaçant dans la bobine Cy provoque une
variation du flux magnétique ce qui génère l’apparition d’une force électromotrice induite proportionnelle à la
vitesse de déplacement de l’oscillateur. La tension u(t)aux bornes de la bobine, détectée par l’oscilloscope, est
donc proportionnelle à la vitesse v(t)de l’oscillateur : u(t) = av(t), où aest le coefficient de proportionnalité. Cette
loi est approchée et suppose que l’aimant ait l’une de ses extrémités proche du centre de la bobine Cet l’autre
nettement à l’extérieur de C. Dans la suite, on confondra v(t)et son image u(t).
2.3 - Dispositif d’amortissement
Il est constitué par les bobines B1(500 spires), B2(1000 spires) et B3
(1500 spires).
Description simple du phénomène d’amortissement : lorsqu’une bobine
est court-circuitée et traversée par un flux magnétique variable du fait du
mouvement de l’aimant, elle est le siège d’un courant induit. Ce courant
induit crée à son tour un champ magnétique qui exerce sur l’aimant une
force de freinage proportionnelle à sa vitesse. En court-circuitant une ou
plusieurs bobines, on peut faire varier le coefficient d’amortissement λ.
2.4 - Oscilloscope numérique TECTRONIX
Les réglages préalables se font directement en mode numérique. Faire
un Autoset. Utiliser la voie CH1 avec les réglages suivants : mode C.C. ;
bande passante à 20 MHz ; réglage fin ; gain x 1 ; pas d’inversion. Régler
l’origine au centre de l’écran. Prendre une base de temps de 250 ms/div
ou 500 ms/div car la période des oscillations est proche de 1 s. Les
mesures sur l’enregistrement se font avec les curseurs.
O
k
M
ℓ(t)
m
B3
B2
B1
C
y
3. Étude expérimentale des oscillations libres
3.1 - Oscillations libres non amorties
Seule la bobine Cest branchée à l’oscilloscope. Lancer le solide et faire un enregistrement de l’image de la
vitesse v(t). Régler l’amplification verticale pour avoir plus ou moins 3 ou 4 carreaux au maximum environ lorsque
l’aimant oscille avec une amplitude de 3 cm environ (l’aimant ne doit pas sortir du cylindre). Pour lancer un
enregistrement, appuyer sur la touche Run/Stop quand l’image est sur l’écran. Appuyer à nouveau sur la touche pour
arrêter l’enregistrement. Recommencer jusqu’à obtenir un « bon » enregistrement, c’est-à-dire un enregistrement
comportant 5 ou 6 périodes complètes. Mesurer avec les curseurs la période propre T0(on mesurera le temps
correspondant à 5 ou 6 périodes pour minimiser les incertitudes) ; en déduire la fréquence propre f0.
Remarque : en passant sur 2 s/div ou 5 s/div on peut observer l’existence d’un très faible amortissement ; quelle
peut en être la (ou les) cause(s) ?
2

Oscillateur Mécanique - MPSI 1 Lycée Chaptal - 2013
3.2 - Oscillations libres amorties
1. Détermination de la pseudo-période
On se place dans le cas de l’amortissement maximal en court-circuitant les 3 bobines (ce qui correspond à
3000 spires). Faire un enregistrement de l’image de v(t)avec au moins 5 périodes complètes. Mesurer avec
les curseurs la pseudo-période Tet comparer à T0. Conclusions ?
2. Détermination du coefficient d’amortissement λ
Mesurer avec les curseurs 5 ou 6 valeurs des amplitudes successives vpcorrespondant aux maxima successifs
de la vitesse (p = 0 correspond à la première mesure). Utiliser le logiciel Regressi pour entrer les grandeurs
pet vp. Définir la grandeur calculée ln(vp)et utiliser la modélisation pour obtenir la valeur du décrément
logarithmique δ. Imprimer le tableau de valeurs et la courbe. Pour chaque maximum, on a donc vp=v0e−λpT .
Cette loi de décroissance exponentielle de l’amplitude de la vitesse est-elle vérifiée ? Déterminer le coefficient
d’amortissement λ.
3. Influence du nombre de spires sur l’amortissement
On veut vérifier que le décrément logarithmique δest proportionnel au nombre de spires Nde l’enroule-
ment. Pour cela, on détermine le décrément logarithmique δen mesurant avec les curseurs les amplitudes
correspondant à v0et v5. Présenter les résultats dans un tableau avec Regressi.
N500 1000 1500 2000 2500 3000
v0
v5
Montrer que δ=ln(v0/v5)
5. Créer la grandeur calculée δet tracer la courbe δ=f(N). Modéliser la courbe ;
vérifie-t-on la proportionnalité entre δet N? Imprimer la courbe.
II - Oscillations sinusoïdales forcées - 1h
1. Rappels de l’étude théorique
Un nouveau dispositif utilisant un générateur basse fréquence permet d’appliquer une force supplémentaire
sinusoïdale de pulsation ω:F=mA0cos(ωt). L’équation différentielle pour y(t)s’écrit désormais
d2y
dt2+ 2λdy
dt+ω0
2y=A0cos(ωt)
et celle de v(t)d2v
dt2+ 2λdv
dt+ω0
2v=−ωA0sin(ωt) = ωA0cos(ωt +π/2)
Le régime transitoire dure environ 5τoù τ= 1/λ est la constante de temps du système. Au bout de 5τ, on observe
le régime sinusoïdal forcé dont la solution est V(t) = V0cos(ωt +φ), qui est la solution particulière de l’équation
différentielle. L’amplitude V0et la phase φse calculent avec la méthode des complexes. Montrer que
V0=A0
4λ2+ω−ω0
2
ω2
Il y a résonance de vitesse pour ω=ω0et V0max =A0/2λ. La bande passante est caractérisée par les deux
pulsations ω1et ω2avec ω1< ω2pour lesquelles V0=V0max/2. La largeur de la bande passante est définie
∆ω=ω2−ω1et le facteur de qualité par Q=ω0/∆ω. On montre que Q=ω0/2λ. En introduisant les variables
réduites Vr=V0/V0max et s=ω/ω0, on obtient
3

Oscillateur Mécanique
Vr=1
1 + Q2s−1
s2
Exprimer la phase φen fonction de Qet set calculer celle-ci pour ω=ω0.
2. Étude expérimentale des oscillations sinusoïdales en régime forcé
2.1 - Établissement des oscillations forcées
Le bobinage B1(500 spires) est alimenté par un générateur BF en régime sinusoïdal très basse fréquence (fré-
quence de l’ordre de 1,5 Hz variable selon les ressorts et les aimants). La force sinusoïdale d’entretien des oscillations
provient de l’interaction entre l’aimant et le champ magnétique créé par le bobinage B1. Pour l’amortissement, on
prendra les bobines B2et B3en court-circuit (2500 spires).
2.2 - Recherche de la fréquence fr de résonance
La résonance de vitesse a lieu théoriquement à la fréquence propre f0déterminée auparavant. Se placer à cette
fréquence. Laisser l’aimant se mettre en mouvement et attendre l’évolution vers le régime permanent. Le niveau de
sortie du GBF doit être réglé de telle sorte que les oscillations du barreau aimanté ne soient pas d’amplitude trop
importante à la résonance (environ 3 cm au max). Ajuster éventuellement la fréquence par tâtonnements très fins
pour être au mieux à la résonance en observant l’installation du régime forcé.
Si l’on n’est pas exactement à la fréquence de résonance, on peut observer transitoirement la superposi-
tion du régime libre et du régime sinusoïdal forcé, créant un phénomène de battements avant l’établissement
du régime permanent. Pour observer ce phénomène, mettre la base de temps sur 2 ou 5 s/div. Si l’on est bien
à la résonance, le régime permanent s’installe très vite, l’amplitude V0des oscillations est alors maximale.
Faire un enregistrement. Déterminer la fréquence de résonance fret l’amplitude maximale V0max.Pour la suite,
le niveau de sortie du GBF doit être maintenu constant, ce qui revient à fixer la valeur de A0.
2.3 - Courbe de résonance
Choisir 3 valeurs de fréquence entre 0,9frenviron et fret 3 valeurs de fréquence entre fret 1,1frenviron.
Lire les valeurs de fsur le GBF. Pour chaque fréquence, laisser l’aimant se mettre en mouvement depuis sa
position d’équilibre Quand le régime permanent est atteint, faire un enregistrement. Mesurer l’amplitude V0des
oscillations. Présenter les résultats dans un tableau dans Regressi, sans oublier de rentrer les valeurs correspondant
à la résonance (soit 7 couples de valeurs).
2.4 - Exploitation des résultats
Créer les grandeurs calculées Vr=V0/V0max et s=ω/ω0=f/f0. Tracer la courbe Vr=f(s). Modéliser avec
le modèle mathématique correspondant à l’étude théorique vu plus haut. Le logiciel recherche alors la valeur de Q
donnant la courbe la plus proche des points expérimentaux. Imprimer la courbe et le tableau de valeurs et préciser
la valeur expérimentale de Q. Conclure.
4
1
/
4
100%