L`oscillateur amorti en oscillations forcées

B Richoux INRP 1 18/06/03
Outils du physicien Les Outils du Physicien
Outils du logiciel Aide du logiciel IP
Notions de physique Notions de Physique
L'oscillateur amorti en oscillations forcées
L'objectif de cette activité est l'étude des oscillations forcées d'un système masse + ressort. Une première partie
permet de détailler le modèle utilisé (forces et conditions) et de faire une description qualitative du phénomène.
Une deuxième partie permet une construction de la courbe de résonance.
LE DISPOSITIF DE SIMULATION
1- Réduire la fenêtre actuelle à 1/3 d'écran (à gauche) puis charger le fichier Interactive physique dans les 2/3
restants.
Os_force.ip
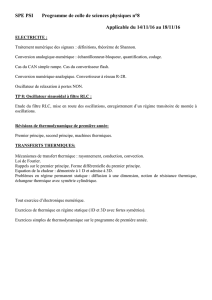
2- Le schéma proposé représente un oscillateur vertical formé d'un objet (A) quasi-ponctuel, d'un ressort à
spires non jointives relié d'une part à l'objet (A) et d'autre part à un moteur (M), d'un amortisseur.
--l'objet (A), de centre d'inertie G, de masse m = 1 kg, est situé à l'origine des coordonnées à la date t = 0. Un
diagramme donne yG en fonction du temps (courbe et valeur instantanée).
--l'amortisseur, situé en dessous de (A), a une extrémité fixe et l'autre extrémité exerce sur l'objet (A) une force
toujours opposée au vecteur vitesse, et proportionnelle à cette vitesse ( d'expression - h v ). L'amortissement
est réglable grâce au "potentiomètre" permettant de modifier le coefficient de frottement h.
--le ressort a une constante de raideur k = 100 N/m et une longueur à vide de 50 cm.
--le moteur imprime à l'extrémité du ressort un mouvement sinusoïdal de fréquence F. F est réglable grâce à
un "potentiomètre" et l'élongation du point M est représentée dans le cadre supérieur gauche.
On trouve également des boutons pour lancer la simulation, pour la réinitialiser avant tout nouveau départ, pour
imprimer l'écran, pour obtenir des informations sur les différents "objets" que l'on manipule, et un dernier bouton
pour effacer l'avant-dernière courbe tracée.
3- Dans le cas étudié, les choix préexistants utilisent le modèle suivant : dans le référentiel terrestre (supposé
galiléen pendant la durée de l'expérience) l'objet (A) de centre d'inertie G est soumis à trois forces, la tension du
ressort en - k x toujours dirigée selon la verticale, la force de pesanteur constante et la force exercée par

B Richoux INRP 2 18/06/03
l'amortisseur en - h v toujours verticale également. La loi de Newton permet de connaître à chaque instant
l'accélération de G. Le programme calcule pas à pas les grandeurs vitesse et position du centre d'inertie de
l'objet à partir de l'accélération (issue de l'équation différentielle du mouvement, voir la méthode d'Euler), les
conditions initiales (vitesse et position à la date t = 0) étant données.
Une fiche-réponse à compléter est disponible.
Fiche réponse
(après l'avoir téléchargée, vous
devrez l'imprimer)
L'oscillateur amorti en oscillations forcées (première partie)
L'OBJECTIF DE L'ACTIVITÉ
Cette première partie permet de détailler le modèle utilisé (forces et conditions) et de faire une description
qualitative du phénomène.
TRAVAIL PRÉLIMINAIRE SUR LE MODÈLE
1. Quels sont les valeurs des paramètres
à choisir pour obtenir avec ce modèle les
oscillations libres non amorties ? Quelle
est la valeur de la fréquence propre lue
sur la courbe yG = f(t) ? Quelle valeur
obtient-on pour cette fréquence propre
par le calcul ?
Le modèle des oscillations libres non
amorties suppose que h = 0 pour qu'il
n'y ait pas d'amortissement et F = 0 pour
que l'autre extrémité du ressort reste
toujours immobile.
Mais l'objet reste immobile car la
position de départ correspond à la
position d’équilibre :
En lançant le modèle alors que les
conditions initiales sont yG = 0 et sa
vitesse initiale nulle, G va donc rester à
la position d'équilibre. Pour avoir un
mouvement il faut :
--soit donner une ordonnée à l'origine
dans le tableau des propriétés de (A)
avec le bouton "Informations sur les
composants",
--soit donner une vitesse à l'origine de la
même façon.
On peut aussi retrouver les oscillations
amorties en fixant la valeur de h à
h = 2 N/ms-1

B Richoux INRP 3 18/06/03
2. Lancer maintenant la simulation avec les valeurs de référence F = 1 Hz et h = 2 N/ms-1 et en annulant
toutes les modifications que vous avez pu faire dans la première question
Justifier que dans les propriétés du point M (Point [1]) on ait écrit yM = 0,5 + mg/k + 0,020 sin ( 2piFt ) et que le
diagramme affiche bien l'élongation du point M.
3. Justifier que l'ordonnée yG est bien l'élongation du centre d'inertie G.
A l'équilibre, les deux forces qui s'exercent sur l'objet (A), poids et tension du ressort, sont égales et opposées.
Ainsi k*deltaL = m*g, ce qui explique que l'ordonnée du point M soit yM = 0,5 + mg/k + 0,020 sin ( 2piFt ).si
l'ordonnée de G est 0.
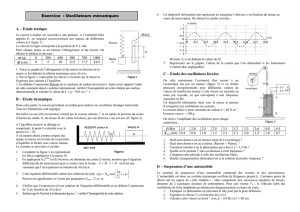
4. Quelle est la fréquence des
oscillations.
L'observation des deux graphes tracés met en
évidence deux conclusions :
1- La fréquence des oscillations de G n'est plus
la fréquence propre du système masse-ressort
mais la fréquence du "moteur".
5×T = 9,30 − 4,28⇒ T = 1,0 s soit f = F
Pour cette raison, on appelle "excitateur" le
moteur M et "résonateur" l'objet (A). Les
oscillations sont des oscillations forcées.
2- Un régime transitoire est observé avant que
les oscillations sinusoïdales ne s'établissent.
Dans la suite de l'étude, il faudra vérifier que ce
régime transitoire est terminé avant de faire les
"mesures".
L'oscillateur amorti en oscillations forcées : deuxième partie
L'OBJECTIF DE L'ACTIVITÉ
L'objectif est maintenant de tracer la courbe représentant l'amplitude des oscillations de G en fonction de la
fréquence de ces oscillations.
INFLUENCE DES PARAMÈTRES
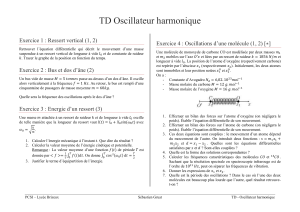
1. Tracer sur papier millimétré la courbe suivante, avec h = 2 N/ms-1 :
en ordonnée, l'amplitude des oscillations de Gen abscisse, la fréquence des oscillations de G.
2. Déduire de la courbe la valeur de la fréquence de résonance ainsi que la largeur de la bande passante.
3. Refaire une série de mesure avec h = 5 N/ms-1. Conclure sur l'influence de l'amortissement sur le
phénomène de résonance.
1. Méthode
On fixe la valeur de F et on mesure l'amplitude de la
courbe lorsque le régime oscillatoire est stabilisé. Le
mode pas à pas permet des mesures rapides et
précises.
Le choix des valeurs de F doit permettre de tracer la
courbe avec plus de précision dans la zone de
fréquence la plus intéressante, c'est à dire autour de
F = 1,6 Hz fréquence propre du système
masse+ressort.

B Richoux INRP 4 18/06/03
Résonance et bande passante
La résonance correspond au maximum de l'amplitude : la fréquence de résonance est très voisine de la
fréquence propre de l'oscillateur masse + ressort, et ceci est d'autant mieux vérifié que l'amortissement est
faible.(la fréquence de résonance diminue quand l'amortissement augmente)
On obtient la bande passante en traçant la droite d'équation amplitude = amplitude maximale ÷ racine de 2 : les
deux intersections avec la courbe déterminent les deux fréquences qui définissent la bande passante.
La largeur de la bande passante dépend de l'amortissement :
--pour un amortissement faible, la résonance est aiguë et la largeur de la bande passante est faible,
--pour un amortissement fort, la résonance est floue et la largeur de la bande passante est forte.
1
/
4
100%