filtres - mpsi1-fenelon-sainte

filtres
Table des matières
1 grandeurs fondamentales des quadripoles 2
1.1 Impédances d’entrée et de sortie . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 fonctiondetransfert ............................... 3
1.2.1 définition ................................. 3
1.2.2 représentation : diagramme de Bode . . . . . . . . . . . . . . . . . . 3
1.2.3 fréquences de coupures . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 filtres passe-bas d’ordre 1 5
2.1 Comportement asymptotique . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 fonctiondetransfert ............................... 5
2.3 Diagramme de Bode - Pulsation de coupure à -3dB . . . . . . . . . . . . . . 6
2.3.1 Représentation de la courbe de gain . . . . . . . . . . . . . . . . . . 6
2.3.2 Représentation de la courbe de phase . . . . . . . . . . . . . . . . . . 6
3 filtres passe-haut du premier ordre 7
3.1 Comportement asymptotique . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.2 Fonctiondetransfert............................... 7
3.3 Diagramme de Bode - Pulsation de coupure à -3dB . . . . . . . . . . . . . . 8
3.3.1 Représentation de la courbe de gain . . . . . . . . . . . . . . . . . . 8
3.3.2 Représentation de la courbe de phase . . . . . . . . . . . . . . . . . . 8
4 exemple d’un filtre passif du second ordre : circuit RLC série 9
4.1 sortieouvertesurC................................ 9
4.2 sortieouvertesurR ............................... 10
4.3 sortieouvertesurL................................ 11
5 filtres actifs 11
5.1 présentation de l’amplificateur opérationnel . . . . . . . . . . . . . . . . . . 11
5.2 montages de bases en régime linéaire . . . . . . . . . . . . . . . . . . . . . . 14
5.3 exempledefiltreactif .............................. 15
1

On appelle quadripôle électrocinétique tout système relié électriquement à l’extérieur par
quatre conducteurs. Un quadripôle électrocinétique est donc caractérisé par quatre bornes
électriques : deux bornes d’entrée et deux bornes de sortie.
Un quadripôle est généralement relié à un dipôle source par ses deux bornes d’entrée et
à un dipôle charge par ses deux bornes de sortie. D’un point de vue électrocinétique, le
quadripôle est caractérisé par quatre grandeurs électriques, tensions et courants d’entrée
et de sortie.
Si ces quatre grandeurs sont reliées entre elles par un système différentiel linéaire, homo-
gène, de deux équations à coefficients constants, le quadripôle est dit linéaire.
Les tensions d’entrée ueet de sortie ussont reliées par une équation différentielle linéaire
à coefficients constants
An
dnus
dtn+... +A1
dus
dt +A0us=Bm
dmue
dtm+... +B1
due
dt +B0ue
En régime sinusoïdal, on a alors
us
ue
=B0+B1(jω) + ... +Bm(jω)m
A0+A1(jω) + ... +An(jω)n
Si le signal d’entrée est sinusoïdal de pulsation ω, le signal de sortie est également sinusoï-
dal de même pulsation.
Un quadripôle dont la réponse en fonction de la fréquence n’est pas constante est un filtre :
il ne laissera passer (sans atténuation significative) que les signaux sinusoidaux de pulsation
adaptée alors que certaines composantes vont être atténuées (ou au contraire amplifiées),
ce qui va avoir pour effet de modifier l’allure du signal de sortie par rapport à celui appliqué
à l’entrée. Ceci est notamment utilisé pour transporter des signaux (radio notamment où
le signal sonore doit être modulé et démodulé pour être transporté à grande distance).
Si le filtre comporte au moins une source auxiliaire d’énergie électrique, il est dit actif.
A l’inverse, un filtre passif ne comporte que des éléments passifs ; la puissance moyenne
disponible en sortie d’un filtre passif est donc toujours inférieure ou égale à la puissance
moyenne reçue en entrée.
Un filtre actif comportant des sources, la puissance moyenne disponible en sortie peut être
supérieure à celle reçue en entrée.
On se placera pour toute la suite en régime sinusoïdal.
1 grandeurs fondamentales des quadripoles
Il est possible de définir pour un quadripôle des grandeurs caractéristiques comme les
impédances d’entrée et de sortie, et les gains en tension, courant et puissance.
2

1.1 Impédances d’entrée et de sortie
Pour un filtre passif, l’impédance d’entrée est l’impédance Ze=Ve
Ie
vue à l’entrée quand
la sortie est chargée par une impédance de charge Zuinfinie.
L’impédance de sortie est l’impédance Zs=Vs
Is
vue à la sortie quand l’entrée est reliée à
la masse.
Pour un filtre actif, Pour calculer l’impédance d’entrée, on éteint toutes les osurces libres
et on évalue Ze=Ve
Ie
quand la sortie est chargée par une impédance de charge Zuinfinie.
On alimente le filtre par une source de tension Vsplacée entre les bornes de sortie. La
tension d’entrée est rendue nulle, et toutes les sources libres sont éteintes. L’impédance de
sortie est alors l’impédance Zs=Vs
Is
1.2 fonction de transfert
1.2.1 définition
La fonction de transfert en tension est définie par
H(jω) = Us
Ue
Elle permet de comparer les tensions de sortie et d’entrée. On puet définir l’analogue en
terme d’intensité.
La fonction de transfert dépend en général de l’impédance complexe du dipôle d’utili-
sation ; on résume ceci en disant que l’utilisation "charge" le quadripôle. On ne peut
donc pas étudier le quadripôle seul.
Elle ne dépend par contre en général pas du circuit en amont de l’entrée du quadripôle.
La fonction de transfert se présente généralement comme le rapport de deux polynômes de
ω. On appelle ordre du filtre le degré le plus élevé des deux polynômes.
H(jω) = G(jω) exp(jϕ(ω))
-G(ω) = |H(jω)|=|Vs(jω)|
|Ve(jω)|est le gain en tension.
-ϕ(ω) = arg(Vs)−arg(Ve)est le déphasage de la tension de sortie par rapport à
la tension d’entrée.
Pour visualiser l’effet d’un filtre, on représente sa fonction de transfert sous la forme d’un
diagramme de Bode.
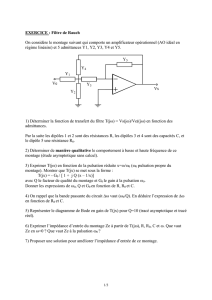
exercice 10
1.2.2 représentation : diagramme de Bode
On appelle représentation dans le plan de Bode d’une fonction de transfert H(jω)l’en-
semble des deux diagrammes suivants :
3

- une courbe donnant le gain en décibels GdB de la fonction de transfert en fonction de
la pulsation ωen échelle logarithmique (vu la gamme de pulsations possibles !) :
GdB =f(log10ω) = 20 log10 |H(jω)|
Le décibel est une unité sans dimension qui permet de mesurer le rapport de deux
grandeurs. Ainsi, si le gain en décibels pour une pulsation ω0augmente de 20 dB par
rapport à celui d’une pulsation ω,
20 log10 |H(jω0)|=G0(ω0) = 20 + 20 log10 |H(jω)|= 20 log10 |10 ∗H(jω)|
ce qui signifie que le module de la fonction de transfert a été multiplié par 10. Si le gain
en décibels augmente de 40 dB, cela signifie que le module de la fonction de transfert a
été multiplié par 102.
Remarque : le facteur 20 n’est pas anodin : le rapport, en décibel (1/10 de
Bel), des puissances électriques dissipées par effet Joule dans une résistance est
XdB = 10 log10 P1
P0= 10 log10 U2
1
U2
0= 20 log10 U1
U0, U1et U2désignant les tensions
efficaces aux bornes de la résistance.
Remarque 2 :
Les gains en tension sont souvent très petits et l’utilisation des décibels permet de
manipuler des nombres plus grands.
Par ailleurs, si on place deux étages en cascade de gains G1= P1/P0et G2= P2/P1, le
gain total est égal au produit G1.G2 des gains des étages. Si les gains sont exprimés en
décibels, le gain total en décibels est la somme des gains.
- une courbe donnant l’argument ϕ(ω)de la fonction de transfert, en échelle linéaire en
fonction de la pulsation ωen échelle logarithmique, appelée courbe de phase :
ϕ(log10ω) = arg H(jω)
Exprimentalement, ϕ(ω) = ϕs−ϕepeut être mesurée à l’aide d’un oscilloscope.
Remarques :
- les tracés expérimentaux se font en portant la fréquence en échelle logarithmique : on
utilise du papier semi-logarithmique.
- Les tracés théoriques se font souvent en utilisant une variable réduite sans dimension :
x =ω/ω0,ω0étant une pulsation caractéristique du système.
- On appelle diagrammes asymptotiques de Bode, les diagrammes de Bode réduits à leurs
asymptotes. Ces diagrammes permettent une approche beaucoup plus rapide de l’aspect
du diagramme de Bode "complet".
- Une décade est l’intervalle de pulsations séparant ωde 10 ω. Cela correspond à une unité
de l’abscisse sur le diagramme de Bode. Une octave est l’intervalle de fréquence séparant
une pulsation de son double, soit trois décibels sur le diagramme de Bode.
On peut donner les mêmes définitions en terme de fréquence.
4

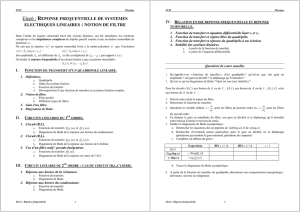
1.2.3 fréquences de coupures
La courbe de module du gain dans le plan de Bode d’une fonction de transfert d’un sys-
tème linéaire est caractérisée par un gain maximal noté Gmet une ou deux fréquences (ou
pulsations) pour lesquelles la valeur du gain a diminué de 3 dB par rapport au maximum,
appelées fréquences (ou pulsations) de coupure.
GdB (ωc) = GdBmax −3dB ou G(ωc) = Gmax
√2
Le choix de 3 dB revient à définir la bande passante comme la gamme de fréquence pour
laquelle la puissance délivrée à la charge est comprise dans l’intervalle [1
2Pmax, Pmax]
exercice 11
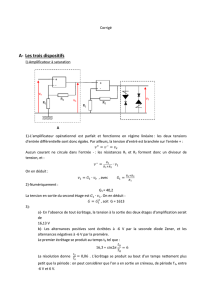
2 filtres passe-bas d’ordre 1
A condition que la sortie ne soit pas cnargée, ce circuit est un diviseur de tension idéal.
2.1 Comportement asymptotique
L’impédance du condensateur vaut ZC=1
jCω .
- Si ω→0, le condensateur équivaut à un interrupteur ouvert et ZC→ ∞ et Us→Ue.
- Si ω→ ∞ alors ZC→0et Us→0.
On peut donc dire que le filtre transmet les signaux de basse fréquence et atténue ceux de
haute fréquence. C’est un filtre passe-bas.
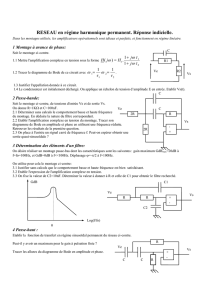
2.2 fonction de transfert
H(jω) = Us
Ue
Us
Ue
=
1
jCω
R+1
jCω
=1
1 + jRCω
H(jω) = 1
1 + jω
ω0
en posant ω0=1
RC . Soit x=ω
ω0
.H(jx) = 1
1 + jx
5
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%