lois de Kepler

Rappels
La démonstration des lois de Kepler repose d’une part sur la 2eme loi du mouvement de
Newton qui régit la trajectoire d’un corps de masse m en fonction de la force
F
r
qui lui est
appliqué et qui s’exprime dans un référentiel galiléen selon l’équation :
amF r
r=
[1]
où
a
r
est le vecteur accélération.
Pour mémoire, on rappelle que le vecteur vitesse est la dérivée première par rapport au temps
du vecteur position et le vecteur accélération est la dérivée seconde par rapport au temps du
vecteur position.
Elle repose d’autre part sur le modýle de la loi de la gravitation universelle appliquée ü des
corps sphériques. Le théorýme du potentiel central stipule que la force d’attraction
gravitationnelle exercée par un corps M de masse m présentant une symétrie sphérique est
identique ü celle qui serait exercée si la totalité de la masse m était concentrée en son centre.
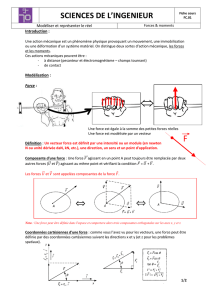
La force qu’un corps sphþrique M1de masse m1exerce sur un autre corps sphérique M2de
masse m2s’applique conformþment ý la figure 1 et s’þcrit :
21
21
2
21
21
21 MM
MM
MM
mm
GF
-=
r
[2’]
où G est la constante de gravitation universelle.
Rþciproquement, la force d’attraction gravitationnelle exercþe par le corps M2sur le corps M1
s’þcrit :
12
12
2
12
12
12 MM
MM
MM
mm
GF
-=
r
[2’’]
Figure 1 : Force d’attraction gravitationnelle
F
r

Coniques
On appelle conique tout ensemble de points M de coordonnées (x,y) dans un repère
orthonormé (O,
i
r
,
j
r
)vérifiant une relation de la forme :
022
22 =++++ DyDxCyBxA
où A, B, C, D et E sont des nombres réels tels que A et B non tous deux nuls.
Le tableau suivant donne les équations décrivant les coniques non dégénérées dans les repères
cartésien et polaire, et sous forme paramétrique :
Type de conique
Coordonnées
cartésiennes
Coordonnées polaires
Equation
paramétrique
Cercle de rayon r
excentricité e=0
1
2
2
2
2=+ r
y
r
x
r=r
q
q
sin
cos
=
=
ry
rx
Ellipse de demi-grand
axe a et demi-petit
axe b
excentricité 0<e<1
aba
e22 -
=
1
2
2
2
2=+ b
y
a
x
q
rcos1
2
-
=ea
b
q
q
sin
cos
=
=
by
ax
Parabole
excentricité e=1
facteur d’échelle p
xpy = 2
2
q
rcos1 -
=ep
ty
p
t
x
=
=2
2
Hyperbole
excentricité e>1
aba
e22 +
=
1
2
2
2
2=- b
y
a
x
q
rcos1
2
-
=ea
b
q
q
tg
b
y
a
x
=
=cos
Le problème des 2 corps
En considérant le système à 2 corps décrit figure 1, la relation fondamentale de la dynamique
appliquée dans un référentiel galiléen de centre O défini arbitrairement s’écrit respectivement
ý partir de [2’] et [2’’] pour chacun des corps M1et M2 :
12
12
2
12
12
21
2
1MM
MM
MM
mm
G
dt
OMd
m
-=
[3’]
21
21
2
21
21
22
2
2MM
MM
MM
mm
G
dt
OMd
m
-=
[3’’]
La somme de [3’] et [3’’] donne immþdiatement :
0
22
2
2
21
2
1=+ dt
OMd
m
dt
OMd
m
[4]
que l’on peut rþþcrire sous la forme :
( ) 0
22211
2=
+
dt
OMmOMmd
[5]

et dont une solution particulièrement évidente est :
0
2211 =+ OMmOMm
[6]
traduisant ainsi le fait que O est le centre de masse C (barycentre des masses ou centre
d’inertie) du systýme ü 2 corps et que le repýre orthonormé (C,
i
r
,
j
r
) constitue un repère
galiléen.
Il vient alors facilement :
1
2
21
21 CM
mmm
MM
+
-=
[7’]
2
1
21
21 CM
mmm
MM
+
=
[7’’]
Les formules [3’] et [3’’] s’þcrivent alors respectivement :
( ) 3
1
1
2
21
3
2
21
2
CM
CM
mm
m
G
dt
CMd
+
-=
[8’]
( ) 3
2
2
2
21
3
1
22
2
CM
CM
mm
m
G
dt
CMd
+
-=
[8’’]
et décrivent le mouvement des corps M1et M2par rapport à leur centre de masse C dans le
repère galiléen (C,
i
r
,
j
r
).
Après simplification la différence entre [3’] et [3’’] permet d’écrire immédiatement :
( ) 3
21
21
21
221
2
MM
MM
mmG
dt MMd +-=
[9]
qui décrit le mouvement du corps M2par rapport au corps M1dans le repère orthonormé non
galiléen (M1,
i
r
,
j
r
) et réciproquement le mouvement du corps M1par rapport au corps M2
dans le repère orthonormé non galiléen (M2,
i
r
,
j
r
).
On notera que les équations [8’], [8’’] et [9] présentent une symétrie de bon aloi et qu’elles
sont toutes les trois de la forme :
32
2
r
r
dtrd rr
-= m
[10]
où µ prend respectivement les valeurs
( )2
21
3
2mm
m
G+
,
( )2
21
3
1mm
m
G+
et
( )
21 mmG +
.
Le terme µ dans [9] est la somme du coefficient gravitationnel µ1du corps M1et du
coefficient gravitationnel µ2du corps M2définis par :
11 mG =m
[11’]
22 mG =m
[11’’]
Dans l’hypothüse oû la masse du corps M1(corps central) est très supérieure à la masse du
corps M2(corps satellite), le centre de masse C du système à 2 corps est confondu avec le
centre du corps M1, les þquations [8’’] et [9] sont donc identiques puisque les repüres

(C,
i
r
,
j
r
) et (M1,
i
r
,
j
r
) sont confondus, et l’approximation suivante est réalisable sans nuire de
faûon significative ü la précision des calculs :
1
mm =
[12]
Cette approximation est notamment applicable dans le cas des satellites artificiels et des
sondes interplanétaires.
Nous allons donc étudier dans la suite de ce document les propriétés des mouvements
planétaires qui sont identiques que ces mouvements soient étudiés dans le repère galiléen
(C,
i
r
,
j
r
), dans le repère non galiléen (M1,
i
r
,
j
r
) ou dans le repère non galiléen (M2,
i
r
,
j
r
).
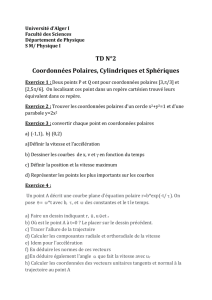
Vitesse en coordonnées polaires
La relation liant coordonnées cartésiennes (x,y) et coordonnées polaires (r,q) du vecteur
position
r
r
, illustrée par la figure 2, est :
q
q
sin
cos
=
=
ry
rx
[13]
Figure 2 : Coordonnées polaires dans le repère orthonormé (W,
i
r
,
j
r
)
La dérivation de [13] par rapport au temps donne la relation liant coordonnées cartésiennes et
coordonnées polaires du vecteur vitesse :
dt
d
r
dt
dr
dt
dy dt
d
r
dt
dr
dt
dx
q
qq
q
qq
+=
-=
cossin
sincos
[14]
Le carrþ de la norme V du vecteur vitesse s’þcrit d’aprüs ses coordonnþes cartþsiennes :
22
2
+
=dt
dy
dt
dx
V
[15]
En reportant [14] dans [15] on obtient le carré de la norme du vecteur vitesse d’aprýs ses
coordonnées polaires :
2
2
2
2
+
=dt
d
r
dt
dr
Vq
[16]

Accélération en coordonnées polaires
La dérivée seconde par rapport au temps de [13] donne l’expression des coordonnées
cartésiennes du vecteur accélération dans le référentiel polaire :
2
2
2
2
2
2
2
2
2
2
2
2
2
2
cossincos2sin
sincossin2cos
dt
d
r
dt
d
r
dt
d
dt
dr
dt rd
dt yd
dt
d
r
dt
d
r
dt
d
dt
dr
dt rd
dt xd
q
q
q
q
q
qq
q
q
q
q
q
qq
+
-+=
-
--=
[17]
Le passage dans le repère cartésien (xθ,yθ), illustrþ par la figure 3, s’obtient en appliquant la
matrice de changement de repüre relative ý une rotation d’angle q :
-
=qq
qq
cossin
sincos
M
[18]
Figure 3 : Changement de repýre de rotation d’angle q
D’oû l’expression des composantes radiale (selon l’axe
q
x
) et tangentielle (selon l’axe
q
y
) du
vecteur accélération exprimées dans le référentiel polaire :
2
2
2
2
2
2
2
2
2
2dt
d
r
dt
d
dt
dr
dt
yd
dt
d
r
dt rd
dt
xd
qq
q
q
q
+=
-=
[19]
2eme loi de Kepler
La relation [10] permet d’écrire les composantes radiale et tangentielle du vecteur
accélération :
0
2
2
22
2
=
-=
dt
yd rdt
xd
q
qm
[20]
 6
7
6
7
1
/
7
100%