CINEMATIQUE : MOUVEMENTS PARTICULIERS

Terminale S-SI Cinématique Analytique
Modifié le 22/09/2009 (PC)
page 1/6
CINEMATIQUE : MOUVEMENTS PARTICULIERS
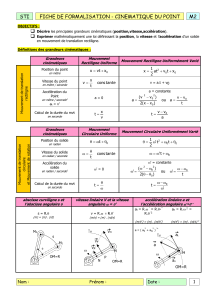
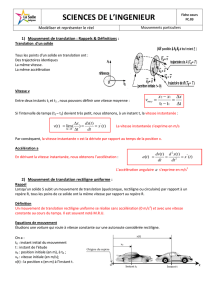
1. Mouvement de translation : Définitions
1.1. Translation d’un solide
Tous les points d'un solide en translation ont :
- Des trajectoires identiques
- La même vitesse.
- La même accélération
1.2. Vitesse v
Entre deux instants t
1
et t
2
, nous pouvons définir une vitesse moyenne :
t
t
t
12
12
∆
∆
=
−
−
=xxx
v
moy
moy
v
s’exprime en m/s
Si l’intervalle de temps (t
2
– t
1
) devient très petit, nous obtenons, à un instant t, la vitesse instantanée :
)(
)(
)
t
(lim)(
'
0t
tx
dt
tdxx
tv
==
∆
∆
=
→∆
La vitesse instantanée
v
s’exprime en m/s
Par conséquent, la vitesse instantanée v est la dérivée par rapport au temps de la position x.
1.3. Accélération a
En dérivant la vitesse instantanée, nous obtenons l’accélération :
)(
)()(
)(
''
2
2
tx
dt
txd
dt
tdv
ta ===
L’accélération angulaire
a
s’exprime en m/s
2
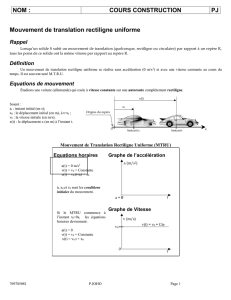
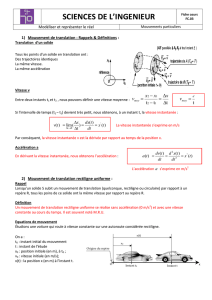
2. Mouvement de translation rectiligne uniforme
2.1. Rappel
Lorsqu’un solide S subit un mouvement de translation (quelconque, rectiligne ou circulaire) par rapport à un
repère R, tous les poins de ce solide ont la même vitesse par rapport au repère R.
2.2. Définition
Un mouvement de translation rectiligne uniforme se réalise sans accélération (0 m/s
2
) et avec une vitesse
constante au cours du temps. Il est souvent noté M.R.U.

Terminale S-SI Cinématique Analytique
Modifié le 22/09/2009 (PC)
page 2/6
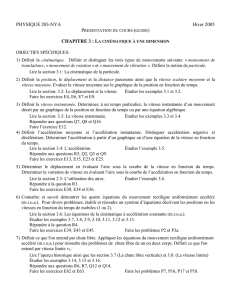
2.3. Equations de mouvement
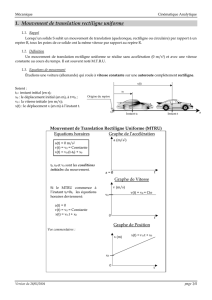
Étudions une voiture qui roule à vitesse constante sur une autoroute considérée rectiligne.
On a :
t
0
: instant initial du mouvement
t : instant de l'étude
x
0
: position initiale (en m), à t
0
;
v
0
: vitesse initiale (en m/s);
x(t) : la position x (en m) à l’instant t.
Instant t x
Instant t0
x(t)
x0
O
Origine du repère
Mouvement de Translation Rectiligne Uniforme (MRU)
Equations
a(t) = 0
v(t) = v
0
= Cte
x(t) = v
0
.t + x
0
x
0
, v
0
sont les valeurs de
position et de vitesse
à l'instant zéro.
Ces valeurs sont constantes
pendant toute la durée de la
phase d'étude.
Graphe de l’accélération
a = 0
0
t
a (m/s
2
)
Les équations ci-dessus sont
vraies si le MRU commence à
l’instant t
0
=0s.
Graphe de Vitesse
v(t) = v
0
= Cte
0
t
v
0
v (m /s)
Remarque :
Dans le cas où le mouvement ne
commence pas à t
0
=0 ; les
équations du mouvement
s'écrivent :
a(t) = 0
v(t) = v
0
= Constante
x(t) = v
0
.(t-t
0
) + x
0
Graphe de Position
x(t) = v
0
.t + x
0
0
t
x
0
x (m)

Terminale S-SI Cinématique Analytique
Modifié le 22/09/2009 (PC)
page 3/6
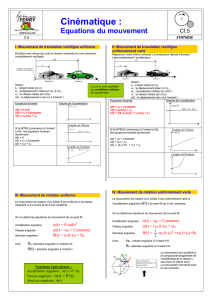
3. Mouvement de translation rectiligne uniformément varié
3.1. Définition
Ce type de mouvement sert de modèle à de nombreuses études simplifiées. Pour ces mouvements,
l’accélération reste constante au cours du temps. Il est souvent noté M.R.U.V.
3.2. Equations du mouvement
Reprenons notre même véhicule. Le conducteur décide d’écraser (raisonnablement) l’accélérateur.
Soient :
t
0
: instant initial du mouvement (en s);
x
0
: la position initiale, à t=t
0
;
a : l’accélération de la phase (en m/s
2
) ;
v
0
: la vitesse initiale (en m/s) ;
x(t) : la position (en m) à l’instant t.
Instant t x
Instant t
0
x(t)
x
0
O
v
0
v(t)
Equations
a(t) = constante
v(t) = a
0
.t + v
0
x(t) = 1/2. a.t
2
+ v
0
.t + x
0
Comme pour le MRU,
x
0
, v
0
sont les valeurs de
position et de vitesse
à l'instant zéro.
Ces valeurs, comme l'accélération,
sont constantes pendant toute la
durée de la phase d'étude.
Graphe de l’accélération
a(t) = Cte
0
t
a
0
a (m/s2)
Les équations ci-dessus sont
vraies si le MRUV commence à
l’instant t
0
=0s.
Graphe de vitesse
v(t) = a.t
+
v
0
0
t
v
0
v (m/s)
Remarque :
Dans le cas où le mouvement ne
commence pas à t
0
=0 ; les équations du
mouvement s'écrivent :
a(t) = a
0
= constante
v(t) = a
0
. (t
0
-t)² + v
0
x(t) =1/2.a
0
. (t
0
-t)² + v
0
.(t
0
-t)² + x
0
Graphe de position
x(t) =
1/2
. a.t
2
+ v
0
.t + x
0
0
t
x
0
x (m)

Terminale S-SI Cinématique Analytique
Modifié le 22/09/2009 (PC)
page 4/6
4. Mouvement circulaire (ou de rotation) : Définitions
4.1. Rotation d’un solide
Pour connaître, à tout instant t, la position
d’un solide indéformable subissant un
mouvement de rotation, il nous suffit de définir sa
position angulaire
θ
(
t
)
.
M1
M
2
x
θ1=θ( t1)
θ2=θ( t2)
∆θ
Instant t1
I
nsta
n
t
t
2
O
4.2. Vitesse angulaire, ou vitesse de rotation
ω
Entre deux instants t
1
et t
2
, nous pouvons définir une
vitesse angulaire moyenne
:
ω
moy
=
θ
2
−
θ
1
t
2
−
t
1
=
∆
θ
∆
t
ω
moy
s’exprime en rad/s
Si l’intervalle de temps (t
2
– t
1
) devient très petit, nous obtenons, à un instant t, la
vitesse angulaire instantanée
:
ω
(t)=lim
∆t→0
(
∆
θ
∆
t
)=
d
θ
(
t
)
dt
=
θ
'
(t)
La vitesse angulaire
ω
s’exprime en rad/s
Par conséquent,
la vitesse angulaire est la dérivée par rapport au temps de la position angulaire
.
4.3. Accélération angulaire
α
En
dérivant la vitesse angulaire
, nous obtenons
l’accélération angulaire
:
α
(t)=d
ω
(t)
dt
=d
2
θ
(t)
dt
2
=
θ
''
(t)
L’accélération angulaire
α
s’exprime en rad/s
2
Remarque : L’analogie avec l’étude du mouvement en translation rectiligne est évidente.
Nous retrouvons les mêmes grandeurs cinématiques (position, vitesse, accélération) suivies du terme angulaire. Nous allons
donc, de la même façon, étudier des cas particuliers de mouvement de rotation.

Terminale S-SI Cinématique Analytique
Modifié le 22/09/2009 (PC)
page 5/6
5. Mouvement circulaire uniforme
5.1. Définition
L’accélération angulaire
α
(t) est nulle. Ce mouvement est noté M.C.U.
5.2. Equations de mouvement
Les équations d’un MCU sont :
α
αα
α(t) = θ
θθ
θ’’(t) = 0 rad/s2
ω
ωω
ω(t) = ω
ωω
ω
0
= Constante
θ
θθ
θ(t) = ω
ωω
ω.(t-t
0
) + θ
θθ
θ
0
t
0
,
ω
0
et
θ
0
sont les
conditions initiales
du mouvement.
Si t
0
= 0 alors les équations du MCU deviennent :
α
αα
α(t) = 0 rad/s2
ω
ωω
ω(t) = ω
ωω
ω
0
= Constante
θ
θθ
θ(t) = ω
ωω
ω.t + θ
θθ
θ
0
6. Mouvement circulaire uniformément varié
6.1. Définition
L’accélération angulaire
α
(t) est constante. Ce mouvement est noté M.C.U.V.
6.2. Equations de mouvement
Les équations horaires d’un MCUV sont :
α
αα
α(t) = α
αα
α = Constante
ω
ωω
ω(t) = α
αα
α.(t-t
0
) + ω
ωω
ω
0
θ
θθ
θ(t) =1/2.α
αα
α.(t-t
0
)
2
+ ω
ωω
ω
0
.(t-t
0
) + θ
θθ
θ
0
t
0
,
α
0
,
ω
0
et
θ
0
sont les
conditions initiales
du mouvement.
Si t
0
= 0 alors les équations du MCUV deviennent :
α
αα
α(t) = Constante
ω
ωω
ω(t) = α
αα
α.t + ω
ωω
ω
0
θ
θθ
θ(t) =
2
1
.α
αα
α.t
2
+ ω
ωω
ω
0
.t + θ
θθ
θ
0
 6
6
1
/
6
100%