Analyse d`un système Mécanique

Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
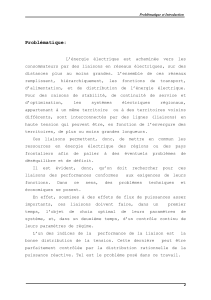
Analyse d’un système Mécanique
Objectif : Dénombrer et définir les inconnues du système
Inconnues ?
Description des mouvements
()
i
qt
Paramètres
Cinématiques
Description des liaisons
Efforts : Résultante
Moments
Naturelles
R
G
()
A
M
G
2 Classifications des Actions Mécaniques
Efforts Intérieurs – Efforts extérieurs Théorique « PFD »
Efforts Inconnus – Efforts donnés Pratique

Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
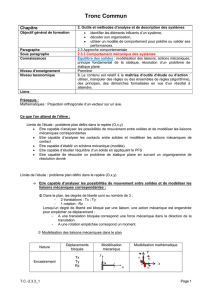
Analyse des liaisons mécaniques
Modèle Liaisons Parfaites Î6 inconnues
Mobilités
Efforts de liaison
Description des liaisons élémentaires Puis des liaisons simples

Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
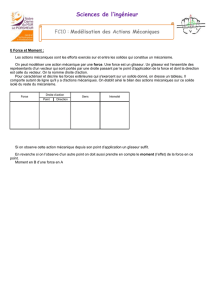
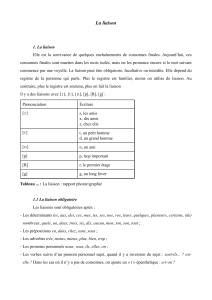
Analyse des liaisons mécaniques
Liaisons élémentaires Liaisons simples
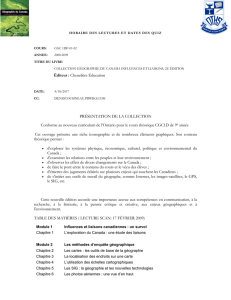
Ponctuelle
{}
12 ()
:0
SSAA
R
Nz
TM
→
⎧=
⎪
⎨
=
⎪
⎩
G
G
G
G
5 Mobilités ⎩
⎨
⎧
),( 2
),,( 3
vunstranslatio
rqprotations
1 inconnue effort
On peut écrire // Rz
G
G
Ou 0Rz
Λ
=G
G
G
Normale au Plan z
G
Pensez à la pointe de votre stylo

Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
Analyse des liaisons mécaniques
Liaisons élémentaires Liaisons simples
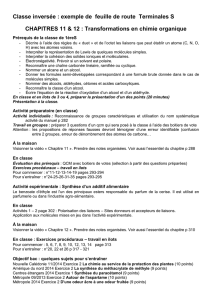
Rectiligne
{}
12 ()
:
SSAA
A
RNz
T
M
Mx
→
⎧=
⎪
⎨=
⎪
⎩
G
G
GG
4 Mobilités 2 ( , )
2 ( , )
rotations q r
translations u v
⎧
⎨
⎩
2 inconnues effort
On peut écrire 0
A
Mx
Λ
=
G
G
G
Normale au Plan z
G
Direction de l’appui y
G
Ou
A
A
M
z
M
y
⎧
⊥
⎪
⎨
⊥
⎪
⎩
G
G
G
G
Une règle dont l’arrête est en contact avec la table

Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
Analyse des liaisons mécaniques
Liaisons élémentaires Liaisons simples
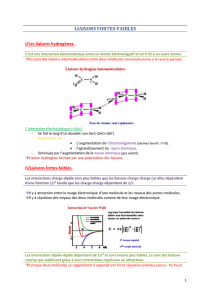
Appui Plan
{}
12 ()
:. 0
SSAA
RNz
TMz
→
⎧=
⎨=
⎩
G
G
GG
3 Mobilités 1 ( )
2 ( , )
rotation r
translations u v
⎧
⎨
⎩
3 inconnues effort
On peut écrire
A
M
z
⊥
G
G
Normale au Plan z
G
Pensez à une règle posée sur la table
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%