Modélisation des actions mécaniques

Modélisation
des
Actions Mécaniques
Modélisation d’actions mécaniques 1
15/09/2013

NOTION D’ACTION MECANIQUE
• Créer ou modifier un mouvement ;
On appelle action mécanique toute cause susceptible de :
La charge excessive soulevée par un haltérophile
déforme la barre des haltères.
Le déplacement d’un voilier est dû à l’action
mécanique exercée par le vent sur la voile.
• Maintenir un corps au repos ;
L’action mécanique exercée sur la manivelle
d’un étau permet de fixer une pièce entre les
2 mors de l’étau.
• Déformer un corps ;
Modélisation d’actions mécaniques 2
MODÉLISATION
A.M.E.
NOTION
DIFFÉRENTS
TYPES
MODÈLE FORCE
• CONTACT
• PRESSION
• PESANTEUR
• RESSORT
MOMENT
• / AXE
• / POINT
• DÉTERMINATION
TORSEUR
• EXPRESSION
• NOTATION
• PARTICULIERS
• DANS LIAISONS
MODÉLISATION
A.M.E.
NOTION
DIFFÉRENTS
TYPES
MODÈLE FORCE
• CONTACT
• PRESSION
• PESANTEUR
• RESSORT
MOMENT
• / AXE
• / POINT
• DÉTERMINATION
RESULTANTES
• F concourantes
• F quelconques
TORSEUR
• EXPRESSION
• NOTATION
• PARTICULIERS
• DANS LIAISONS
15/09/2013

DIFFERENTS TYPES D’ACTIONS
MECANIQUES
• LES ACTIONS MECANIQUES A DISTANCE
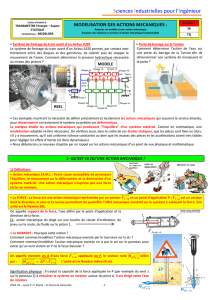
En construction mécanique, elles sont
essentiellement de type magnétique ou de
pesanteur.
Dans le cas de contact entre deux solides, les deux solides sont
obligatoirement en liaison mécanique et l’action mécanique exercée
dépend de la nature du contact entre les deux solides. ( ponctuel,
linéique, surfacique plan, etc.…)
Par exemple, une liaison pivot glissant ne peut transmettre les mêmes
efforts qu’une liaison encastrement à cause de ses deux degrés de
liberté.
• LES ACTIONS MECANIQUES DE CONTACT
Elles résultent :
- Soit du contact d’un fluide (gaz ou liquide) sur
un solide;
- Soit du contact d’un solide avec un autre solide.
Modélisation d’actions mécaniques 3 13/04/2012
MODÉLISATION
A.M.E.
NOTION
DIFFÉRENTS
TYPES
MODÈLE FORCE
• CONTACT
• PRESSION
• PESANTEUR
• RESSORT
MOMENT
• / AXE
• / POINT
• DÉTERMINATION
RESULTANTES
• F concourantes
• F quelconques
TORSEUR
• EXPRESSION
• NOTATION
• PARTICULIERS
• DANS LIAISONS
15/09/2013

Point d’application
Direction
Sens
Intensité
LE MODELE DE LA FORCE
- Origine : point de contact
- Direction : Direction de l’effort
- Sens : vers pièce sur laquelle s’exerce l’effort,
- Norme : dépend de la « grandeur » de l’effort.
Par exemple, l'action mécanique qui s'exerce entre deux solides en
contact ponctuel sera modélisée par une force, dont les caractéristiques
sont celles d’un vecteur;
Modélisation d’actions mécaniques 4 13/04/2012
MODÉLISATION
A.M.E.
NOTION
DIFFÉRENTS
TYPES
MODÈLE FORCE
• CONTACT
• PRESSION
• PESANTEUR
• RESSORT
MOMENT
• / AXE
• / POINT
• DÉTERMINATION
RESULTANTES
• F concourantes
• F quelconques
TORSEUR
• EXPRESSION
• NOTATION
• PARTICULIERS
• DANS LIAISONS
15/09/2013

LE MODELE DE LA FORCE
Nous avons vu en étudiant les liaisons que le contact entre deux pièces pouvait être soit
ponctuel, linéique ou surfacique. Dans un premier temps, nous allons étudier l'action
mécanique transmissible par un contact ponctuel parfait ( liaison parfaite ).
CAS DU CONTACT PONCTUEL PARFAIT (Sans Frottements)
L'action mécanique qui s'exerce entre deux solides en contact ponctuel sera
modélisée par une force, dont les caractéristiques sont celles d’un vecteur :
- Origine : point de contact E,
- Direction : normale au plan tangent de contact (0,Y ,Z ) donc suivant X.
- Sens : vers pièce sur laquelle s’exerce l’effort, ici: suivant les X négatifs,
- Norme : dépend, de la « grandeur » de l’effort.
E 4/2
On a l'habitude de désigner une action mécanique
modélisable par une force de la façon qui suit :
solide sollicité
solide qui exerce la force
point d’application de la force
E 4/2
X
Y
Modélisation d’actions mécaniques 5 13/04/2012
MODÉLISATION
A.M.E.
NOTION
DIFFÉRENTS
TYPES
MODÈLE FORCE
• CONTACT
• PRESSION
• PESANTEUR
• RESSORT
MOMENT
• / AXE
• / POINT
• DÉTERMINATION
RESULTANTES
• F concourantes
• F quelconques
TORSEUR
• EXPRESSION
• NOTATION
• PARTICULIERS
• DANS LIAISONS
15/09/2013
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
1
/
23
100%