Actions mécaniques

Actions mécaniques
Créer ou modifier
un mouvement Maintenir un corps en
équilibre ou au repos Déformer un corps
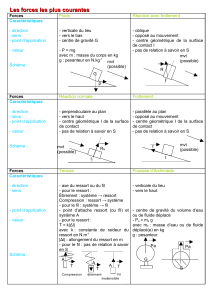
1-Définition d’une action mécanique
On appelle action mécanique toute cause capable de :

Actions mécaniques
2-Différents types d’actions mécaniques
2-1-Actions mécaniques de contact
Elles résultent :
- Soit du contact d’un fluide (gaz ou liquide) sur un solide;
- Soit du contact d’un solide avec un autre solide.
2-2-Actions mécaniques àdistance
En construction mécanique, elles sont essentiellement
de type magnétique ou de pesanteur.

Actions mécaniques
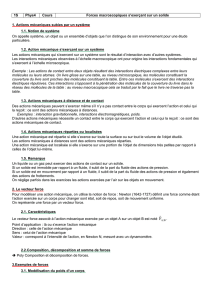
3-Modélisation des actions mécaniques
E3/6
Levier 3
Tiroir 6
solide sollicité
solide qui exerce la force
point d’application de la force
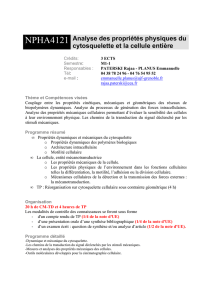
E3/6
- Origine : point de contact E,
- Direction : normale au plan tangent de contact
- Sens : vers le bas, suivant les Y1négatifs,
- Norme : dépend, de la « grandeur » de l’effort. ( ici du levier sur le tiroir)
Ex1
y1
L'action mécanique qui s'exerce entre deux solides en contact ponctuel sera
modélisée par une force, dont les caractéristiques sont celle d’un vecteur :
3-1 CAS DU CONTACT PONCTUEL PARFAIT (Sans Frottements)

Actions mécaniques
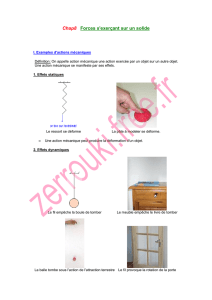
3-2 CAS DES CONTACTS NON PONCTUELS
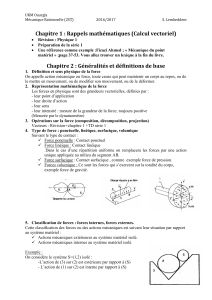
3-2-1 Cas du contact linéique
FFF
F

Actions mécaniques
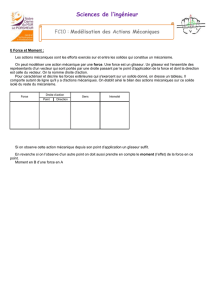
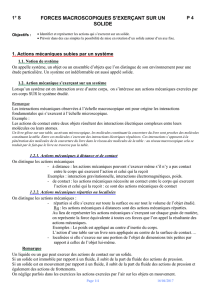
3-2-2 Cas de la Pression d’un Fluide sur une Paroi Plane
f
r
D
f
r
D
f
r
D
f
r
DFF
La pression sera supposée uniforme (constante sur toute la paroi).
Elle s’applique en chaque élément de surface de la paroi.
F
r
Leur somme nous donne une force appelée force de pression ayant
les caractéristiques suivantes :
f
r
D
Nous avons donc une infinité de forces élémentaires .
-Point d’application :le centre de la surface, F
- Direction : perpendiculaire à la surface de contact entre le fluide et la paroi
- Sens : dirigé vers la paroi
- Norme :
p.S F
r
, avec :
- F : effort développé (N)
- p : pression uniforme du fluide (Pa)
- S : surface de la paroi plane, en (m2)
Anciennement:
daN
Bar
cm²
 6
7
8
6
7
8
1
/
8
100%