cours CIN 5 - TSI Ljf.html

Cinématique Résoudre 3 Cours CIN 5 SII
Lycée Jules Ferry Cannes page 1 sur 8 TSI1
Problème technique : Déterminer en pratique le vecteur accélération des différents points d’un solide.
Analyser
Modéliser
Résoudre
Expérimenter
Concevoir
Réaliser
Communiquer
Choisir une démarche de résolution
%
Savoirs faires associés
Question(s)
bilan
Proposer une démarche permettant de déterminer une loi de mouvement
Procéder à la mise en œuvre d’une démarche de résolution analytique
%
Savoirs faires associés
Question(s)
bilan
Déterminer la trajectoire d’un point d’un solide par rapport à un autre
Déterminer le vecteur vitesse d’un point d’un solide par rapport à un autre
Déterminer le vecteur accélération d’un point d’un solide par rapport à un autre
Cours
C3 CIN 5
TSI1
TSI2
Cinématique
Analyser - Modéliser - Résoudre
X
Période
Centrifugeuse
1
2
3
4
5
Cycle 3 :
cinématique
Durée :
1h
X

Cinématique Résoudre 3 Cours CIN 5 SII
Lycée Jules Ferry Cannes page 2 sur 8 TSI1
Etude des accélérations des mécanismes
Bilan des méthodes de détermination graphique d’un vecteur Vitesse
Application directe sur un embiellage de moto
Le but est de déterminer le vecteur Accélération
ou
1 - Présentation
2 - Accélération le long d’une trajectoire
Cas particulier du mouvement de rotation
3 - Accélérations des différents points d’un solide
4 - Composition du vecteurs Accélération.
5 - Bilan.
6 - Cinématique du contact ponctuel entre 2 solides.

Cinématique Résoudre 3 Cours CIN 5 SII
Lycée Jules Ferry Cannes page 3 sur 8 TSI1
1 - Présentation
Accélération d’un point
1.1.1. vecteur accélération instantanée
tv
tv
tv
dt
Vd
a
z
y
x
A
A'
'
'
ou
tz
ty
tx
dt
OAd
aA''
''
''
2
2
intensité en m/s2 (ou m.s-2)
2 - Accélération le long d’une trajectoire
accélération normale et tangentielle
Le vecteur accélération instantanée peut toujours se décomposer en :
- un composante perpendiculaire à la trajectoire : l’accélération normale
- un composante tangente à la trajectoire : l’accélération tangentielle
ntA aaa
t
a
est dans le sens de la trajectoire si le point A
accélère et dans le sens opposé s’il ralentit.
dt
dv
at
n
a
est toujours dirigée vers l’intérieure de la
courbure de la trajectoire.
R
v
an
2
R : rayon de courbure de la trajectoire
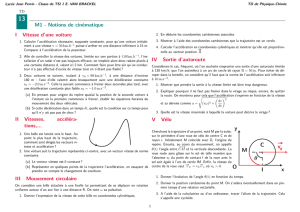
Cas particulier du mouvement de rotation
Pour un mouvement de rotation on a donc :
A
x
y
z
O
A0
Tangente à la
trajectoire au point A
A
a
t
a
n
a
Pour un mouvement de rotation uniforme ω’ =0 donc
l’accélération tangentielle est nulle mais
l’accélération normale n’est jamais nulle
bien que la vitesse soit constante.

Cinématique Résoudre 3 Cours CIN 5 SII
Lycée Jules Ferry Cannes page 4 sur 8 TSI1
3 - Accélérations des différents points d’un solide
Champ des vecteurs accélérations des points d’un solide.
Soient A et B deux points d’un solide (S) en mouvement par rapport à un repère R.
Nous avons établi :
/
//
SR
V B S R V A S R BA
Dérivons cette expression par rapport au temps dans R.
R
RRR AB
dt
d
RSABRS
dt
d
RSAV
dt
d
RSBV
dt
d ////
Soit
ABRSAB
dt
d
RSABRS
dt
d
RSARSB S
R/////
AB
est fixe dans S.
D’où
ABRSRSABRS
dt
d
RSARSB R /////
Le champ des vecteurs accélération des points d’un solide ne peut pas être décrit par un torseur car ce n’est pas
un champ de moment (le double produit vectoriel du dernier terme l'en empêche). La propriété d’équiprojectivité
n’est pas respectée.
On n’a donc pas d’équivalent a Varignon pour les accélérations.
Donc pas de torseur d’accélération
4 - Composition du vecteurs Accélération.
Composition des accélérations.
Soit un solide (S) en mouvement par rapport à deux repères
1 1 1 1 1
( ; , , )R O x y z
et
2 2 2 2 2
( ; , , )R O x y z
eux-mêmes
en mouvement l’un par rapport à l’autre.
Soit un point P de (S), cherchons une relation entre les vecteurs
1
/P S R
et
2
/RSP
.

Cinématique Résoudre 3 Cours CIN 5 SII
Lycée Jules Ferry Cannes page 5 sur 8 TSI1
22
12
2 2 1 1 2
1 1 2 1 1 1 2 1 1 2
1 1 2 1 1 1 2 1
/ / / /
/ ( / ) ( / ) / ( / )
/ ( / ) ( / ) /
RR
RR
dd
P S R V P S R V P S R V P R R
dt dt
dd
V P S R R R V P S R V O R R PO R R
dt dt d
P S R R R V P S R O R R PO
dt
2
2
1
12
1 1 1 2 1 2 1 1 2 1
1 2 1 1 2 1
1 1 2 1 2 1
( / )
/ / ( / ) ( / ) ( / )
( / ) ( / )
/ / 2 ( / ) ( / )
R
R
R
RR
d
P S R O R R R R O P R R V P S R
dt
d
R R O P R R O P
dt
P S R P R R R R V P S R
Car
PORRRRPORR
dt
d
RRORRP R1212112121121 )/()/()/(// 2
Le deuxième terme est appelé accélération d'entraînement du repère R1 par rapport au repère R2.
Le dernier terme
)/()/(2 121 RSPVRR
est appelé accélération de Coriolis.
- Relation de composition des accélérations d’un solide
Cinématique du point :
2
M / Ri M / Rj M Rj / Ri Rj / Ri M / Rj
MV
2
M S / Ri M S / Rj M Rj /Ri Rj/Ri M S /Rj
V
Et non comme
B S/Ri B S/Rj B Rj/Ri
V V V
Donc pas de composition simple
Accélération
ABSOLUE
Accélération
RELATIVE
Accélération
D’ENTRAINEMENT
Accélération
de
CORIOLIS
 6
7
8
6
7
8
1
/
8
100%