Réponse harmonique d`un système linéaire

PSI Brizeux Ch. E1: Réponse harmonique d’un système linéaire 1
CHAPITRE E1
CHAPITRE E1
Réponse harmonique d’un système linéaire
1. SYSTEMES LINEAIRES PERMANENTS
1.1. Définitions
La notion de système linéaire est très générale et on en trouve de multiples exemples en physique.
Nous considérons ici un système physique comprenant une grandeur physique d’entrée e(t) et une
grandeur de sortie s(t).
En électrocinétique, e(t) et s(t) seront par exemple des tensions et l’opérateur, un circuit électrique.
Définition d’un système linéaire : soit S un système donné. Soient e1(t) et e2(t) deux signaux d’entrée
quelconques et s1(t) et s2(t) les signaux de sortie correspondants. Si la réponse de S à l’excitation e(t) =
λ1e1(t) + λ2e2(t) est s(t) = λ1s1(t) + λ2s2(t) (quelques soient λ1 et λ2 constants), alors le système est dit
linéaire.
Ce n’est rien d’autre que le principe de superposition.
Les systèmes tels que l’équation différentielle liant leurs grandeurs d’entrée et de sortie est linéaire,
constituent des exemples de systèmes linéaires.
On rappelle qu’une équation différentielle linéaire est de la forme :
!
b0s(t) +b1
ds
dt +...+bn
dns
dtn=a0e(t) +a1
de
dt +...+an
dme
dtm
(1)
Remarque : ce ne sont pas les seuls systèmes linéaires. Un système permettant d’effectuer l’opération
« retard pur » est un système linéaire. On a alors : s(t) = e(t-τ) (où τ est une constante).
Représenter s(t) =e(t-
τ
) dans le cas ci-dessous :
Exemple de système électronique réalisant une fonction retard ?

PSI Brizeux Ch. E1: Réponse harmonique d’un système linéaire 2
Définition d’un système stationnaire : un système est dit stationnaire ou permanent si ses
caractéristiques ne varient pas au cours du temps. Il vérifie alors le principe de permanence, à savoir
qu’une translation dans le temps (retard ou avance) sur la grandeur d’entrée se traduit par une translation
temporelle identique sur la grandeur de sortie.
t0
e(t)
t
t0+!
e(t)
t
t0
s(t)
t
s(t)
t
t0+!
Cette stationnarité traduit un régime de fonctionnement reproductible du système. Une excitation
donnée au système engendrera toujours la même réponse, quelque soit l’instant auquel on la déclenche.
On peur noter par exemple qu’une stabilisation en température est souvent nécessaire pour que de
nombreux composants atteignent une caractéristique stable.
Les systèmes régis par une équation différentielle linéaire dont les cœfficients ai et bi sont constants
sont des exemples (importants !) de systèmes linéaires permanents.
1.2. Domaine de linéarité
Un système physique n’est jamais rigoureusement linéaire, mais il est possible de le considérer
comme tel si l’amplitude et la fréquence des signaux d’entrée sont comprises dans certaines limites
définissant le « domaine de linéarité » du système.
Exemple :
1.3. Exemples de systèmes linéaires permanents
1.3.1. Système mécanique
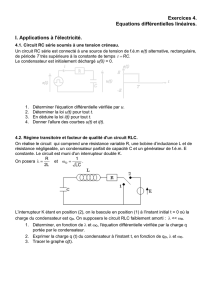
L’exemple choisi est celui d’un oscillateur mécanique amorti pouvant modéliser l’ensemble
{suspension + amortisseur} d’une voiture.
Un système matériel de masse M posé sur
un ressort de raideur k et de longueur à vide l0
et un amortisseur de cœfficient de frottement
fluide λ). La roue suit, sans décoller, la route
de profil x qui est prise comme grandeur
d’entrée du système. On a x = 0 pour la route
plate.
La grandeur de sortie considérée est y(t),
position du barycentre G du système matériel
par rapport à la position d’équilibre.
On pose z(t) l’altitude de G.
k
!
M
z(t)
L
x
L
v
Soit RT le référentiel terrestre (ici supposé galiléen), et RR le référentiel lié au centre de la roue.
La RFD appliquée à G dans RT donne en projection sur l’axe z :

PSI Brizeux Ch. E1: Réponse harmonique d’un système linéaire 3
Md2z
dt2 = -Mg - k(l-l0) - λv(G/RR), ce qui donne avec les compositions des vitesses :
Md2z
dt2 = -Mg - k(z-x-L-l0) - λ(dz
dt - dx
dt ).
En utilisant l’équation d’équilibre du système et en posant y = z-zéq on obtient :
Md2y
dt2 + λ(dy
dt +ky = λdx
dt ) + kx : équation différentielle linéaire à cœfficients constants.
Quelles sont les limites de linéarité d’un tel système ?
1.3.2. Système électrique
On trouve de multiples exemples dans le programme de 1ère année avec les circuits comportant les
dipôles linéaires R, L, C en régime variable : les équations différentielles (en courant, charge ou tension)
régissant de tels systèmes sont linéaires à cœfficients constants.
On rappelle l’analogie électromécanique (deux systèmes de nature physique différente sont
analogues lorsqu’ils sont régis par des équations ou systèmes d’équations de la même forme) :
L
C
R
e(t)
L d2q
dt2 + Rdq
dt + q
C = e(t)
k
!
m
f(t)
On pose x, abscisse
par rapport à la position
d'équilibre
m d2x
dt2 + λdx
dt + kx = f(t)
L’analogie est la suivante :
force
tension
force
courant
position
charge
position
-
vitesse
intensité
ou
vitesse
tension
masse
inductance
masse
capacité
cœff. frott.
résistance
cœff. frott.
conductance
raideur
inverse capacité
raideur
inverse inductance
Remarque : on appelle circuits duaux, des circuits de topologies différentes, régis par des systèmes
d’équations du même type comme par exemple les circuits R, L, C série et parallèle.
L
C
R
e(t)
!(t)

PSI Brizeux Ch. E1: Réponse harmonique d’un système linéaire 4
L d2q
dt2 + Rdq
dt + q
C = e(t)
Cdu
dt + u
R + 1
L
⌡
⌠
0
t
u(t)dt = η(t)
1.3.3. Système thermique
Les lois de conduction de la chaleur sont analogues à celles de la conduction électrique.
On s’intéresse à la température θ d’un local, chauffé par un radiateur délivrant la puissance thermique
P. Les parois du local ne sont pas adiabatiques et on introduit la notion de conductance thermique Gth
telle que la puissance calorifique perdue par la pièce soit : P’ = Gth(θ - θext), θext étant la température
extérieure.
Le premier principe de la thermodynamique appliqué au local de capacité thermique (air + parois) Cth
donne : Cth dθ
dt = -Gth(θ - θext) + P , relation que l’on peut réécrire sous la forme :
Cth d(θ−θext)
dt + Gth(θ - θext) = P , relation linéaire entre la grandeur d’entrée P et la grandeur de sortie θ
- θe.
Ce système est analogue au système électrique constitué d’une source de courant alimentant un
condensateur et une résistance en parallèle :
!(t)
G = 1/R
On a η = C dU
dt + G U
d’où l’analogie :
source de chaleur source de courant
Cth C
Gth G
différence de température différence de potentiel
1.4. Condition de stabilité d’un système linéaire
Un système est dit stable si à toute entrée bornée correspond une sortie bornée.
On suppose un système régi par une équation différentielle linéaire à cœfficients constants :
!
b0s(t) +b1
ds
dt +...+bn
dns
dtn=a0e(t) +a1
de
dt +...+an
dme
dtm
(1)
Pour qu’un tel système soit stable il faut que :
- les racines de l’équation caractéristique b0 + b1r+...+ bnrn = 0 soient à partie réelle négative.
En effet, si tel n’était pas le cas, les solutions correspondantes divergeraient lorsque t tend vers
l’infini. C’est la condition qui permet l’évanescence du régime transitoire.

PSI Brizeux Ch. E1: Réponse harmonique d’un système linéaire 5
Pour des systèmes tels que n = 2, ceci n’est réalisé que si tous les cœfficients de l’équation
caractéristique sont du même signe (règle de Descartes).
- n ≥ m (ordre de dérivation de la sortie supérieur à celui de l’entrée).
On comprend mieux cette condition en se plaçant en régime sinusoïdal forcé.
Dans ce cas, (1) est équivalent à :
[b0 + (jω)b1+...+ (jω)nbn] S = [a0 + (jω)a1+...+ (jω)µam ] E
Si m > n, la réponse est indéfiniment croissante avec la fréquence.
L’ordre du système linéaire est donc forcément n (c’est-à-dire l’ordre de dérivation du signal de
sortie).
1.5. Régimes de fonctionnement d’un système stable
On peut imaginer des grandeurs d’entrée de caractéristiques quelconques. On s’intéresse à la grandeur
de sortie du système linéaire que l’on supposera régi par une équation différentielle du type (1).
1.5.1. Régime transitoire :
Le régime transitoire (ou régime libre) correspond à la solution générale de l’équation sans second
membre. Le système n’est soumis à aucune grandeur d’entrée. Sa durée est limitée sauf pour les systèmes
instables. Sa forme ne dépend que du système et non de la source.
1.5.2. Régime permanent :
Le régime permanent (ou forcé) dépend de la source et correspond à une solution particulière de
l’équation avec second membre. En toute rigueur, le régime permanent n’est atteint que si le signal
d’entrée du système a débuté pour
!
t" #$
, ce qui n’est évidemment pas réalisable. On considèrera donc
que le régime permanent est établi lorsque la réponse du transitoire a une amplitude faible par rapport au
régime forcé.
Parmi les différents régimes forcés possibles, nous nous intéresserons surtout à trois d’entre eux :
- Régime continu indépendant du temps :
Les signaux de commande (d’entrée) ont des caractéristiques constantes. Il en est donc de même du
signal forcé permanent.
- Réponse indicielle:
Les sources ont soit des caractéristiques constantes et sont connectées au système par l’intermédiaire
d’interrupteurs qu'on ouvre ou ferme à partir d'une date t = 0, soit, ce qui revient au même, des
caractéristiques présentant un échelon (voir le chapitre suivant). On s'intéresse alors à l'évolution, vers un
régime continu permanent, des grandeurs de sortie. La connaissance des conditions initiales est
évidemment indispensable à une complète résolution de ce problème.
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%