223 - Les cours de Patrick HOFFMANN

Mécanique - séance n°1: Mouvement d'un point 1
Cinématique du point
1 - Généralités sur le mouvement d'un point
La cinématique du point est l'analyse du mouvement en ignorant ses causes.
Le mouvement d'un point est connu lorsque qu’il est possible d’associer
chaque instant avec un point de la trajectoire:
Mouvement = Trajectoire + Equation horaire
Notre espace physique, celui dans lequel on existe, présente trois dimensions.
Une trajectoire dans cet espace, est représentée par 2 égalités:
f(x,y,z) 0
trajectoire g(x, y, z) 0
=
⇒
=
Chacune d’entre elles est l’équation d’une surface. En effet la trajectoire est
une courbe définie comme l’intersection de deux surfaces.
L’équation horaire est fournie par la valeur de l’abscisse curviligne en fonction
du temps: s = s(t), qui mesure la longueur du chemin parcouru sur la
trajectoire (le compteur de distance de votre véhicule mesure une abscisse
curviligne).
Mouvement connu = trajectoire + équation horaire
L’expression de la trajectoire de la courbe:
f(x,y,z) 0
g(x, y, z) 0
=
=
C
4ième édition_____________________________________ Patrick HOFFMANN

Mécanique - séance n°1: Mouvement d'un point 2
nécessite la présence d’un système d’axes trirectangles, les équations
spatiales sont ici exprimées avec les coordonnées cartésiennes: x, y, z,
projections orthogonales sur chacun des axes.
L’équation horaire implique la présence d’une horloge qui fournit la variable
temporelle t encore nommée "date".
C
0
P
H
M
x'
y'
z'
y(5)
x(5)
z(5)
s(0)
s(5)
t = 5
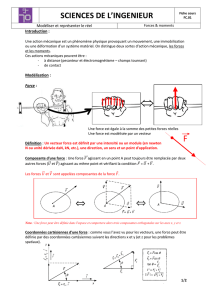
figure:1
Le repère constitué par les trois axes O x’ y’ z’ attachés à un observateur, muni
d’une horloge, constituent un référentiel (ou système référentiel).
4ième édition_____________________________________ Patrick HOFFMANN

Mécanique - séance n°1: Mouvement d'un point 3
2 - Vecteur position
Le repère sert à définir la position du point. Le vecteur position est par
définition le vecteur:
rOM=
G
JJJG
où O est l'origine du repère et M le point à repérer.
Avec un même repère, plusieurs systèmes de coordonnées peuvent être
envisagés. Le choix des coordonnées sera gouverné par les symétries des
problèmes traités. Dans la pratique les coordonnées orthogonales seront les
seules utilisées. Parmi celles-ci les plus courantes sont: les coordonnées
cartésiennes, polaires, cylindriques et sphériques. Donnons quelques
éléments sur leur propriétés:
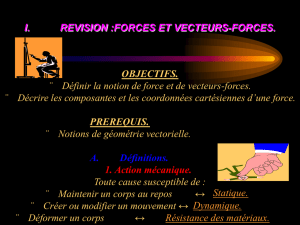
a) Coordonnées cartésiennes
z'
y'
x'
O
P
H
M
y(t)
x(t)
z(t)
J
K
I
i
j
k
r(t)
figure: 2
4ième édition_____________________________________ Patrick HOFFMANN

Mécanique - séance n°1: Mouvement d'un point 4
Le vecteur position est par définition:
rOM=
G
JJJG
Pour définir le trièdre local associé aux coordonnées cartésiennes:
(
)
I,J,K
G
GG
il faut construire le vecteur déplacement, consécutif aux accroissements
séparés et indépendants des variable de position: x, y, z, c’est à dire:
accroissement des variables vecteur déplacement deM
dx , dy , dz dr dx I dy J dz K
⇒
⇒= + +
GGGG
Pour les coordonnées cartésiennes, ∀M le trièdre local: ( I,J,K)
G
GG
est uniforme.
Il est par ailleurs identique au trièdre du repère de référence. Il vient alors:
rxiyjzk=++
G
GGG
La position du point M, à chaque instant, sera exprimée à l’aide des
coordonnées:
x = x(t) ; y = y(t) ; z= z(t)
ou bien avec la trajectoire et l’équation horaire:
f(x, y, z) = 0 ; g(x, y, z) = 0 et s = s(t)
4ième édition_____________________________________ Patrick HOFFMANN

Mécanique - séance n°1: Mouvement d'un point 5
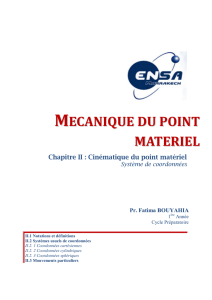
b) Coordonnées polaires
y'
x'
O
M
y
x
JI
i
j
r
ϕ
figure: 3
2r[0, ]
M repéré par r et avec : [0,2 ]
∈
∞
∈ϕ
ϕ
∈π
R
On remarque que la variable r est aussi le module du vecteur position.
Pour le repère local:
accroissement des variables vecteur déplacement deM
dr , d dr dr I r d J
⇒
ϕ⇒=+ϕ
GG G
Attention ici et dépendent du point M choisi, cependant il sont
orthogonaux :
I
G
J
G
IJ,M
⊥
∀
G
G
4ième édition_____________________________________ Patrick HOFFMANN
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%