IUP GEII

Thibaut Raharijaona – 2013-2014 Site de Montperrin Aix en Provence
Licence SPI – Automatique 1
Travaux dirigés
2013-2014
TD 3 : Modélisation de la dynamique d’un propulseur sur un
pendule simple
S 1. Le bras du pendule est de longueur l.
Définition : Le moment cinétique évalué en un point O, dans le référentiel R du point
matériel de masse m est :
On rappelle que l’expression de la vitesse tangentielle vt s’écrit :
Montrez que le moment cinétique du point M par rapport au point O a pour expression :
2. Déterminez les expressions des moments exercées par les forces
u
,
P
et
r
au point
d’attache O en appliquant la formule
où représente le produit
vectoriel.
3. Le théorème du moment cinétique énonce que :
En appliquant le théorème du moment cinétique au système, montrez que l’équation
différentielle qui régit le mouvement du propulseur est donnée par :
Moteur brushless miniature
monté sur le banc d’essai
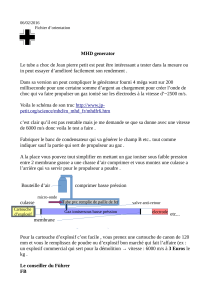
On réalise un banc d’essai constitué d’un pendule simple à
l’extrémité duquel est positionné un propulseur à hélice constitué
d’un moteur brushless de masse m=54g.
L’objectif est de réaliser la régulation de la position angulaire
du
bras à une valeur désirée
d
à l’aide de la force de poussée
u
générée par le moteur et de la mesure d’angle délivrée par un
capteur à effet hall placé au niveau de la liaison pivot.
Le propulseur est commandé par un microcontrôleur.
Microcontrôleur commandant
le propulseur
Schéma de principe du banc d’essai

Thibaut Raharijaona – 2013-2014 Site de Montperrin Aix en Provence
4. On désire réguler la position du propulseur à la position angulaire
d
, quelle est
l’expression de la commande ueq lorsque l’équilibre est atteint ?
5. Pour étudier le comportement dynamique de propulseur autour de la position angulaire
désirée
d
, on introduit les notations suivantes :
d
, où
est un petit angle autour de
d
.
eq
u u v
, où v est l’amplitude de la commande autour de ueq.
Quelle est l’équation différentielle qui régit le mouvement du propulseur autour de la
position d’équilibre
d
?
6. Quelle est l’expression de la fonction de transfert
Ap
Gp Vp
où
p TL t
et
V p TL v t
?
7. Quels sont les pôles de la fonction de transfert G(p) ?
8. Si l’entrée de commande v(t) est une impulsion quelle est l’expression de la
transformée de Laplace A(p) ?
9. Quelle est l’expression mathématique de la réponse temporelle
t
?
10. Donnez une allure de
t
?
11. Quelle est la signification de ce dernier tracé ?
1
/
2
100%