Corrigé TP : Mouvement d'une balle de golf - Physique

v
x
= f(t)
v
y
= f(t)
MOUVEMENT D'UNE BALLE DE GOLF DANS UN CHAMP
DE PESANTEUR UNIFORME
Corrigé
II. Étude de la trajectoire :
La trajectoire est un arc de parabole.
III. Etude de la vitesse :
v
dx dy
i j
dt dt
= +
1) Expressions (4): v
x
(t) =
dt
dx
= 2,3
v
y
(t) =
dt
dy
= −9,8 t + 3,1
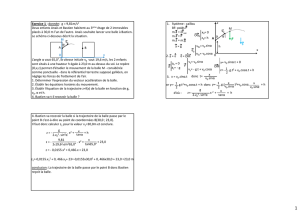
2) a) Par modélisation on obtient :v
x
(t) = −0,053t + 2,3
soit l'équation d'une droite légèrement décroissante.
D'après l'expression (4), on devrait obtenir l'équation
d'une droite horizontale. Il y a un léger décalage entre le modèle et les prévisions, dû sans doute à des
erreurs de mesure avec Aviméca.
b) La coordonnée horizontale de la vitesse v
x
(t) est à peu près constante.
3) a) Par modélisation, on obtient : v
y
(t) = −9,7 t + 3,1
ce qui est cohérent avec l'expression (4).
b) On obtient une fonction affine décroissante, la
coordonnée v
y
décroît au cours du temps.
v
y
est positive au début du mouvement, le vecteur
vitesse est orienté du bas vers le haut.
v
y
est négative ensuite, le vecteur vitesse est orienté du
haut vers le bas.
4)
2 2
v( ) v ( ) v ( )
x y
t t t
= +
v(t) est minimale et vaut v
x
(t). On a alors v
y
(t) = 0, la
balle est au sommet de sa trajectoire.
TP P11
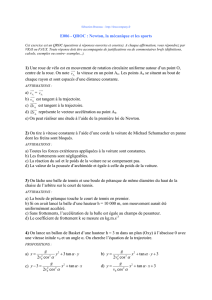
y =
−
0,90x
2
+ 1,3x
(1)
Trajectoire d'une balle de golf
x = 2,3t
(2)
Equation horaire du mouvement
x
= f(t)
Equation horaire du mouvement
y
= f(t)
y =
−
4,9t² + 3,1t
(3)

IV. Étude de l'accélération :
1) a
x
=
v
x
d
dt
= 0 a
y
=
v
y
d
dt
= −
9,8
2)
Le vecteur accélération est vertical (a
x
= 0) et orienté vers le bas (a
y
<0) . Sa valeur est proche de la
valeur de l’accélération de la pesanteur g.
3)
g = 9,81 m.s
-2
(soit 9,8 avec deux chiffres significatifs), soit 0 % d’erreur.
V. Étude théorique :
1)
On prendra le référentiel du
laboratoire
, terrestre et supposé Galiléen.
.
2)
Les forces exercées sur la balle de golf sont : - le
poids
-
la
poussée d’Archimède
-
la
force de frottement
de l'air
3)
D'après le IV.1), le vecteur accélération est vertical vers le bas, donc la somme vectorielle des
forces est également verticale vers le bas. La force de frottement de l'air est donc négligeable
devant le poids. (sinon le vecteur somme des forces aurait une direction oblique)
D'après le IV.3), la valeur de l'accélération est proche de g, donc la
poussée d’Archimède
est
négligeable devant le poids. Ce qui était prévisible car la masse volumique de l’air est très inférieure à
la masse volumique de la balle).
4)
.
=
P ma
donc
m
.
.
g m a
=
alors
g a
=
soit a
x
=
v
x
d
dt
= 0 a
y
=
v
y
d
dt
= −
−−
−g a
z
=
v
z
d
dt
= 0
5) a
x
=
v
x
d
dt
par intégration : v
x
= Cte = v
0x
= v
0
. cosα
αα
α
a
y
=
v
y
d
dt
par intégration : v
y
= −gt + Cte = −gt + v
0y
= −
−−
−gt + v
0
. sinα
αα
α
a
z
=
v
z
d
dt
par intégration : v
z
= Cte = 0
6) v
x
=
dt
dx
par intégration x = v
0
.cosα.t + Cte , or à t = 0, la balle est en O donc x = v
0
.(cosα
αα
α).t
v
y
=
dt
dy
par intégration y = − ½ gt² + v
0
sinα t + Cte donc y = −
−−
−½ gt² + v
0
.(sinα
αα
α).t
v
z
=
dt
dz
par intégration z = Cte, à t = 0 la balle est en O donc z = 0
Les coordonnées de la balle ne varient que suivant deux directions (Ox et Oy): le mouvement est plan.
7) t =
0
v .cos
x
α
2 2
0
1 ²
. . .tan
2 v cos
x
y g x
α
α
= − +
VI. Confrontation du modèle théorique avec les résultats expérimentaux:
1) On a obtenu expérimentalement v
x
(t) = 2,3 et v
y
(t) = −9,8 t + 3,1
Théoriquement v
x
(t) = v
0
.cosα et v
y
(t) = −g.t + v
0
.sinα
D’après v
x
(t) on obtient 2,3 = v
0
.cosα et d’après v
y
(t) on obtient 3,1 = v
0
.sinα
ainsi
0
0
v .sin 3,1
tan
v .cos 2,3
α
α
α
= = donc α = arctan
3,1
2,3
= 53°
v
x
(t) = 2,3 = v
0
.cosα donc v
0
= 2,3
cos53,4269
= 3,9 m.s
-1
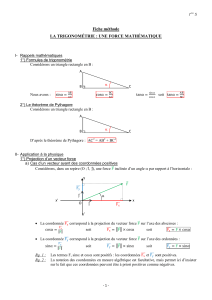
v
0
.cos
α
−g.t + v
0
.sinα
0
v
OG
G
1
G
0
0
v
α
y
x

2) Modèle théorique :
2 2
0
1 ²
( ) . . .tan
2 v cos
α
α
= − +
x
y x g x
soit avec les valeurs expérimentales:
2 2
1 ²
9,81 .tan53,4
2 3,9 cos 53,4
= − × × +
x
y x
y(x) = - 0,91 x² + 1,3 x.
La modélisation de la trajectoire expérimentale donnait l'expression (1): y = − 0,90 x² +1,3.x.
On constate une grande similitude entre les deux expressions, le modèle théorique est validé.
1
/
3
100%