Forces de frottement

Mécanique TP3 1
Forces de frottement
But : Les forces de frottement s’opposent au mouvement et interviennent dès lors qu’une partie de la
surface d’un mobile est en contact avec un solide (frottement solide) ou avec un fluide (frottement
visqueux). Le but de cette manipulation consiste à étudier les principales caractéristiques de ces deux
types de forces de frottement.
• Dans une première partie, nous étudierons le frottement solide apparaissant lors du déplacement d’un
chariot sans roue sur un rail.
• Dans une deuxième partie, nous étudierons le frottement visqueux apparaissant lors de la chute d’une
bille dans de l’huile.
Nous étudierons ces deux types de mouvement avec des enregistrements vidéo comme au TP
« cinématique ». A partir de l’évolution temporelle de la vitesse des mobiles, nous pourrons définir ou
vérifier les caractéristiques des forces mises en jeu.
I. Frottement solide :
Dans cette partie nous n’aborderons pas le cas du frottement solide statique (quand un mobile est à
l’arrêt, voir cours) mais uniquement le cas du frottement solide dynamique, le plus courant (quand un
mobile est en mouvement).
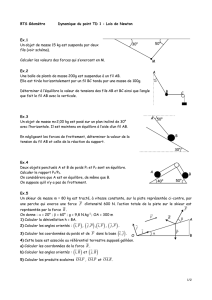
I.1. Présentation du système étudié :
Le système se compose d’un chariot pouvant
se déplacer sur un rail (figure 1). Le rail est en
aluminium et mesure 80 cm de long pour 3 cm
de largeur. Le contact du chariot sur le rail est
assuré par 2 patins en laiton placés à l’avant et
à l’arrière. Des roulements à billes placés sous
le chariot permettent de le guider sur le rail
sans frottement latéral. Les forces de
frottement que nous allons étudier seront donc
caractéristiques du couple laiton sur
aluminium.
Masses
additionnelles
Patin en laiton
Rail en
aluminium
Figure 1 : chariot sur son rail
Roulements de
guidage sur le rail
Repère de position
(pour pointage vidéo)

Mécanique TP3 2
I.2. Rappels théoriques :
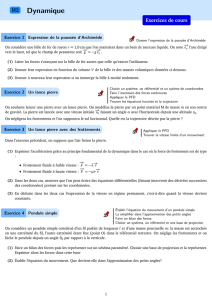
Lorsqu’un mobile se déplace en glissant sur un
support solide, il est soumis à son poids
P
et à
la force de réaction du support. Si le mobile se
déplace sans frottement, la réaction est normale
à la surface de contact. En revanche, s’il y a des
frottements, la réaction n’est plus normale. Elle
se décompose de la manière suivante :
R
=
N
R
+
T
R
avec
N
R
: composante normale ( ici
N
R
= P
).
T
R
: composante tangentielle s’opposant au glissement du
mobile et caractérisant la force de frottement.
La force de frottement
f
F
( =
T
R
) est tangente à la surface de contact. Elle a donc la même direction
que le vecteur vitesse mais son sens en est opposé. Et on montre que le rapport
N
f
R
F
= µ
En résumé : on caractérise la force de frottement solide par le vecteur :
direction : tangent aux surfaces en contact
sens : opposé au mouvement
norme :
f
F
= µ
N
R
P
R
N
R
T
R
v
est une constante sans dimension, appelée coefficient de frottement
dynamique, qui dépend essentiellement de la nature des matériaux en contact
ainsi que de la rugosité de leurs surfaces en contact. Il est indépendant de la
vitesse du mobile et de l’aire des surfaces en contact.
(dans la littérature, ce coefficient possède plusieurs notations :
µ
,
µ
D
, k, k
D
)
f
F

Mécanique TP3 3
I.3. Manipulation
:
a- Mouvement sur le rail à l’horizontale :
♦ Etude théorique :
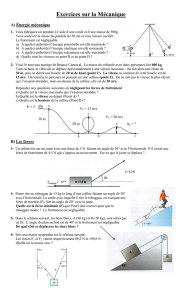
Le rail est placé dans le plan xOy et
colinéaire à la direction Ox. Le chariot est
lancé à la main avec une vitesse initiale, au
moment du lâché égale à
o
v
(v
ox
,0,0). Les
forces de frottement vont freiner le mobile
jusqu’à son immobilisation. On souhaite
déterminer l’évolution temporelle théorique
de sa vitesse et de sa position à partir du
modèle de force donné au paragraphe
précédent.
Le principe fondamental de la dynamique s’écrit :
P
+
R
= m
a
ou encore
P
+
N
R
+
f
F
= ma
Projeter cette relation dans le repère Oxy. Montrer que la résultante des forces est égale à la force
de frottement
f
F
et que l’accélération a
x
du chariot le long de l’axe Ox s’écrit :
a
x
= - µg ( µ : coefficient de frottement dynamique )
( g : champ de pesanteur )
En déduire les coordonnées de son vecteur vitesse et de son vecteur position :
o
v
x
y
z
O
P
R
N
R
f
F

Mécanique TP3 4
♦ Exploitation de l’enregistrement vidéo :
• Allumer votre PC et ouvrir le logiciel « LatisPro » par un double clic sur son icône visible
dans le bureau de Windows.
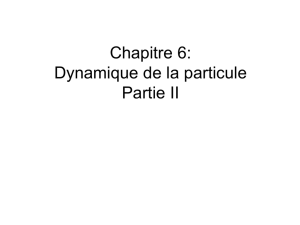
• Faire l’acquisition image par image du fichier : frottement 1.avi.
La distance étalon sera prise entre les deux marques jaunes sous le rail (elle mesure 0.3 m).
On pourra pointer le repère blanc sur la base du chariot comme indiqué ci-dessous (point noir).
Prendre soin de bien repérer la position en x avec le pointeur.
(suivre les instructions de la notice LatisPro, « §1) lecture d’un fichier vidéo» )
Les coordonnées relevées, sont automatiquement sauvegardées dans les variables Mouvement
X et Mouvement Y auxquelles LatisPro affecte une abscisse « Temps » (40ms entre 2 images).
Ces variables sont disponibles dans la Liste des Courbes en cliquant sur le bouton
correspondant en haut à gauche dans la fenêtre principale. (notice §2)
• Pour simplifier, remplacer le nom des variables « Mouvement X » et « Mouvement Y » par
« X » et « Y » (dans la liste des courbes, double clic sur le nom de chaque variable).
• Visualiser la courbe x=f(t) sur la fenêtre n° 1 (voir notice, §4, utiliser les symboles « + » non
reliés pour tracer la courbe _ notice §4-e Modifier le style).
• Calculer la vitesse v
x
du chariot le long de l’axe Ox. Dans la feuille de calcul, écrire :
Vx=deriv(X) puis taper F2 pour exécuter ce calcul.
• Visualiser la courbe v
x
=f(t) sur une nouvelle fenêtre graphique (fenêtre n° 2) (tracé avec les
symboles « + » _ notice §4 et §4-e). Commenter cette courbe :
Le sens de variation :
Est-il en accord avec le mouvement de décélération :
Sa forme :
Que peut-on dire de l’évolution temporelle de l’accélération subie :
Conclusion sur l’évolution temporelle de la force de frottement solide :
La force de frottement dépend-elle de la vitesse du chariot ?

Mécanique TP3 5
♦ Modélisation de v
x
(t) :
• Suivre la procédure de modélisation (notice §6).
• Imprimer votre graphe avec le modèle utilisé et les constantes optimisées (notice §7).
♦ Modélisation de x(t) :
• Suivre la procédure de modélisation (notice §6).
• Imprimer votre graphe avec le modèle utilisé et les constantes optimisées.
• Les constantes ajustées sont-elles en accord avec la modélisation précédente ?
• Accélération : a
x
±
x
a∆= ……………..m.s
-2
L’incertitude sur a
x
sera déterminée avec l’enseignant en tenant compte de tous les résultats
obtenus par les différents binômes.
• En déduire les valeurs suivantes :
Module de la force de frottement
(masse du chariot m
o
= 275g ) :
F
f
±
f
F∆= …………….. N
Coefficient de frottement dynamique :
µ ± ∆µ = ……………..
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%