4 Conditions d`optimalité

Prenom Nom
4 Conditions d’optimalité
[Cette méthode] ne trompe jamais et peut s’étendre à des
questions très belles.
P. de Fermat (1601-1665).
On ne trouvera point de Figures dans cet Ouvrage. Les
méthodes que j’y expose ne demandent ni constructions, ni
raisonnements géométriques ou méchaniques, mais seulement
des opérations algébriques, assujetties à une marche régulière et
uniforme. Ceux qui aiment l’Analyse verront avec plaisir la
Méchanique en devenir une nouvelle branche, et me sauront gré
d’en avoir étendu ainsi le domaine.
J.-L. de la Grange.Méchanique Analytique. [339 ; 1788,
pages XI-XII]
Considérons le problème d’optimisation sous forme générale
(PX)min f(x)
x∈X,
dans lequel on minimise une fonction f:X→Rdéfinie sur une partie Xd’un espace
euclidien E. On note h·,·i le produit scalaire de cet espace vectoriel et
n:= dim E
sa dimension (finie).
Rappelons quelques notions relatives au problème (PX), qui ont été introduites
aux sections 1.1 et 1.2 et qui seront continuellement utilisées dans ce chapitre. L’en-
semble Xsur lequel on minimise fest appelé l’ensemble admissible du problème. Un
minimum (global) de ce problème est un point x∗∈Xtel que
∀x∈X:f(x∗)6f(x).(4.1)
On dit que x∗∈Xest un minimum local de (PX)s’il existe un voisinage Vde x∗tel
que
∀x∈X∩V:f(x∗)6f(x).(4.2)
On parle de minimum global (resp. local) strict si l’on a inégalité stricte dans l’ex-
pression (4.1) (resp. (4.2)), lorsque x6=x∗.
137

Prenom Nom
138 4. Conditions d’optimalité
Les conditions d’optimalité sont des équations, des inéquations ou des propriétés
que vérifient les solutions de (PX)(conditions nécessaires, CN) ou qui assurent à
un point d’être solution de (PX)(conditions suffisantes, CS). Elles traduisent ainsi
l’expression (4.2) de l’optimalité locale en une forme analytique plus directement
utilisable. Ces conditions sont utiles pour de nombreuses raisons, par exemple :
pour vérifier l’optimalité éventuelle d’un point x∈X, voir si c’est un minimum,
un maximum ou un point stationnaire (voir plus loin pour la définition de ce
terme),
pour calculer analytiquement des solutions de (PX),
pour mettre en œuvre des méthodes numériques permettant de trouver des solu-
tions (PX),
pour définir des tests d’arrêt des itérations dans les algorithmes de résolution
de (PX).
On parlera de conditions du premier ordre (notées CN1 ou CS1, selon qu’il s’agit
de conditions nécessaires ou suffisantes) lorsque celles-ci ne font intervenir que les
dérivées premières de fet des fonctions définissant l’ensemble admissible. Quant aux
conditions du second ordre (notées CN2 ou CS2), elles ne font intervenir que les
dérivées premières et secondes de ces fonctions.
Nous commencerons par une condition nécessaire d’optimalité du premier ordre
très générale puisqu’elle concerne le problème (PX); elle est de nature géométrique
(section 4.1). C’est cette condition qui sera ensuite traduite en une forme analy-
tique pour les problèmes sans contrainte (section 4.2), les problèmes avec contraintes
d’égalité (section 4.3) et enfin les problèmes avec contraintes d’égalité et d’inégalité
(section 4.4). Dans cette dernière section, c’est le lemme de Farkas qui permet de faire
cette traduction. Les résultats obtenus dans ce dernier cas permettent de retrouver
les résultats précédents. Dès lors, le lecteur pressé et courageux pourra passer directe-
ment de la section 4.1 à la section 4.4. Rien ne sera perdu quant au contenu, mais on
gagnera en compréhension en se penchant sur les situations plus simples décrites aux
sections 4.2 et 4.3.
Connaissances supposées. Notion de cône dual et lemme de Farkas. Les conditions
du deuxième ordre pour le problème avec contraintes d’égalité et d’inégalité (sec-
tion 4.4.4) requièrent la connaissance de la dualité linéaire, qui ne sera vue qu’au
chapitre 18 ! Cette dernière section peut être passée en première lecture.
4.1 Une condition nécessaire d’optimalité géométrique
4.1.1 Cônes tangent et normal
Dans cette section, on suppose que Edésigne un espace vectoriel normé de dimen-
sion finie. Sa norme est notée k · k.
Le cône tangent est un concept essentiel pour l’écriture des conditions d’optimalité.
Il sert à linéariser l’ensemble admissible au point optimal x∗, comme on le fait avec le
critère en optimisation sans contrainte pour exprimer l’optimalité de x∗:f′(x∗) = 0.
Nous utiliserons essentiellement la notion de tangence suivante. On note
R++ := {x∈R:x > 0}.

Prenom Nom
4.1. Une condition nécessaire d’optimalité géométrique 139
Définitions 4.1 (cône tangent) Soient X⊂Eet x∈E. On dit que le vecteur
d∈Eest tangent àXen x(au sens de Bouligand [76 ; 1932]) s’il existe une suite
{dk} ⊂ Eet une suite {tk} ⊂ R++ telles que
dk→d, tk↓0, x +tkdk∈X. (4.3)
On note TxXl’ensemble des vecteurs tangents à Xen xet on l’appelle le cône
tangent (pour le distinguer d’autres notions de cône tangent, on l’appelle parfois le
cône contingent). 2
La définition précédente a une interprétation géométrique simple : pour que la
direction dsoit tangente à Xen x, il faut qu’elle soit limite de directions dk, telles
que x+R++dkrencontre Xen un point qui se rapproche de xlorsque k→ ∞. Le
passage à la limite est essentiel, sous peine d’appauvrir radicalement TxXet de le
rendre ainsi inutilisable. Il ne suffirait pas en effet de prendre comme cône tangent,
ce que l’on nomme le cône radial en x
Tr
xX:= {d∈E:x+td ∈Xpour tout t > 0petit}.(4.4)
Par exemple, si X={x∈R2:x2
16x262x2
1}et x= 0,Tr
xX=∅, alors que
TxX=R× {0}. Le cône tangent diffère donc en général de Tr
xXou de l’adhérence
de celui-ci. Il en sera aussi souvent ainsi lorsque Xest défini par des égalités non
linéaires. Toutefois (voir l’exercice 4.2)
Xest convexe =⇒TxX=Tr
xX.
On verra aussi que si Xest donné par des contraintes fonctionnelles d’égalité et
d’inégalité et si des conditions de qualification des contraintes sont vérifiées, le cône
tangent se calcule aisément en utilisant les gradients des contraintes fonctionnelles
actives en x(voir la section 4.4.2).
La définition 4.1 d’une direction tangente est facile à interpréter, mais elle n’est
pas la plus opérationnelle. Il s’avérera plus utile de faire jouer le rôle principal à la
suite {xk}, où xk=x+tkdk, plutôt qu’à la suite {dk}. Il revient en fait au même de
dire que d∈TxXsi, et seulement si, il existe des suites {xk} ⊂ Eet {tk} ⊂ Rtelles
que
{xk} ⊂ X, tk↓0et xk−x
tk→d. (4.5)
Forcément, xk→x. Voici un premier exemple d’utilisation de cette définition équiv-
alente.
Proposition 4.2 TxXest un cône fermé.
Démonstration. Soit {dk} ⊂ TxX, avec dk→d. Il faut montrer que d∈TxX.
Pour tout k>1, il existe une suite {xk,j }j⊂Xet une suite {tk,j }j↓0telles que
(xk,j −x)/tk,j →dklorsque j→ ∞. On construit à présent des suites par le procédé
diagonal. Pour tout i>1, on détermine d’abord kitel que kdki−dk61
iet ensuite ji
tel que k(xki,ji−x)/tki,ji−dkik61
iet tki,ji61
i. Clairement {xki,ji}i⊂X,tki,ji↓0
et (xki,ji−x)/tki,ji→dlorsque i→ ∞, si bien que d∈TxX.2

Prenom Nom
140 4. Conditions d’optimalité
On vérifie que
x /∈X=⇒TxX=∅,
x∈int X=⇒TxX=E,
x∈intr X=⇒TxX= (aff X)−(aff X).
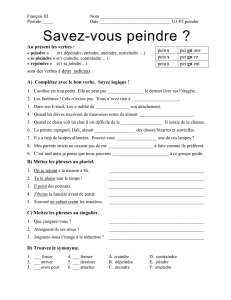
Les cas non triviaux se présentent donc lorsque xest sur la frontière de X. On trou-
vera à la figure 4.1 quelques exemples de cônes tangents. Notons que TxXn’est pas
x3
Nx3X3
X1
Nx1X1
Tx1X1
x1
x2
X2
X3
Nx2X2
0
0
Tx3X3
Tx2X2
0
Fig. 4.1. Cônes tangent (en bleu clair) et normal (en rose) à quelques ensembles (en haut)
nécessairement convexe (mais il est convexe si Xest convexe, voir l’exercice 4.2). En
voici un contre-exemple.
Exemple 4.3 L’ensemble non convexe X:= {x∈R2:x2
16x2
2}a son cône tangent
en (0,0) qui s’écrit T(0,0)X={d∈R2:|d1|6|d2|} et qui n’est pas convexe. 2
On note que TxXne dépend de Xque dans un voisinage de x: si l’on modifie X
en dehors d’un voisinage de x, on ne change pas TxX(il suffit de ne retenir dans la
propriété (4.5) que les xkqui sont dans ce voisinage). D’autre part, TxXne dépend
pas de la manière utilisée pour définir X. En particulier, si Xest défini par des
contraintes fonctionnelles (voir plus loin), le cône tangent ne dépend pas du choix des
fonctions utilisées pour le définir.
Définitions 4.4 (cône normal) Soient Eun espace euclidien (produit scalaire noté
h·,·i), X⊂Eet x∈E. On dit que p∈Eest normal àXen xsi
∀d∈TxX:hp, di60.(4.6)
On note NxXl’ensemble des vecteurs normaux à Xen xet on l’appelle le cône
normal.2
Cette définition du cône normal est simple mais un peu restrictive selon Rockafellar
[456 ; 1993 ; p. 193], qui l’appelle cône normal régulier ; elle suffira pour notre propos.

Prenom Nom
4.1. Une condition nécessaire d’optimalité géométrique 141
Clairement, le cône normal est le dual négatif du cône tangent :
NxX= (TxX)−=−(TxX)+(4.7)
et, contrairement à TxX,NxXest donc toujours convexe (point 1 de la proposi-
tion 2.32). D’après le point 5 de la proposition 2.32, un cône est contenu dans son
bidual et donc
TxX⊂(NxX)−.(4.8)
On montre que (voir l’exercice 4.2)
Xconvexe =⇒TxX= (NxX)−.
Si Xn’est pas convexe, TxXpeut ne pas être convexe (exemple 4.3) ; donc l’égalité
ci-dessus peut ne pas avoir lieu car (NxX)−est toujours convexe (point 1 de la
proposition 2.32). Remarquons aussi que, lorsque Xest convexe, on retrouve le cône
normal défini à la section 2.5.4 (voir l’exercice 4.2).
4.1.2 Une condition d’optimalité du premier ordre
Commençons donc par considérer le problème général
(PX)min f(x)
x∈X,
où Xest une partie de E. La condition nécessaire d’optimalité du premier ordre
suivante met en évidence l’utilité des notions de cônes tangent et normal.
Théorème 4.5 (CN1) Si x∗est un minimum local de (PX)et si fest dérivable
en x∗, on a
∀d∈Tx∗X:f′(x∗)·d>0.(4.9)
Ceci s’écrit aussi
∇f(x∗)∈(Tx∗X)+ou −∇f(x∗)∈Nx∗X, (4.10)
où ∇f(x∗)est le gradient de fen x∗pour le produit scalaire de E,(·)+désigne
le dual pour ce même produit scalaire et Nx∗Xest le cône normal à Xen x∗.
Démonstration. Soit d∈Tx∗Xnon nul (la relation (4.9) est triviale si d= 0). Alors
il existe des suites {xk} ⊂ Xet {tk} ↓ 0telles que dk:= xk−x∗
tk→d. Pour kgrand,
xk=x∗+tkdk∈Xest voisin de x∗, si bien que par l’optimalité locale,
pour kgrand : f(x∗+tkdk)>f(x∗).
Si fest dérivable en x∗,f(x∗+tkdk) = f(x∗) + f′(x∗)·(tkdk) + o(ktkdkk), donc
06f′(x∗)·dk+o(ktkdkk)
tk
=f′(x∗)·dk+o(ktkdkk)
ktkdkkkdkk.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
1
/
60
100%