Hybridation d`une pile à combustible par des supercondensateurs


CHAPITRE V
Essais de systèmes hybrides
PAC/SC pour le projet ISS
à puissances significatives

Essais de systèmes hybrides PAC/SC pour le projet ISS à puissances significatives
200
-SC à
Nous avons fait le choix de présenter les essais et analyser les
résultats mais aussi de donner certains détails techniques des dispositifs réalisés pour permettre
icative (5kW fournis par la PAC, 10kW crête
consommés) des
installation similaire pourra
employées, en évitant les erreurs commises. Dans cette optique, nous proposons ce chapitre
suivant ce déroulement :
: résumé des travaux antérieurs
Présentation de la partie matérielle
Présentation de la partie logicielle
Résultats expérimentaux
Comparaison, analyses et conclusions
5.1 Approche théorique, projet ISS
Une introduction aux systèmes hybrides à base de PAC dans un contexte aéronautique a
déjà été faite dans le chapitre I ;
aspects.
5.1.1 Contexte de l’étude : projets CELINA et ISS
(MEA : More Electrical Aircraft, [WEI-93],
[CUT-02]) notamment porté par le projet Européen MOET (More Open Electrical
en
particulier ROS-07]. Or un avion
peut être sujet à diverses pannes et entre autres une perte totale des moteurs ou de la
génération électrique. Ces pannes doivent naturellement rester acceptables [MEH-89]. Dans la
majorité des gros avions, une turbine éolienne (RAT- Ram Air Turbine) est alors déployée pour
et alimenter un réseau de secours [BOL-09]. Les actionneurs
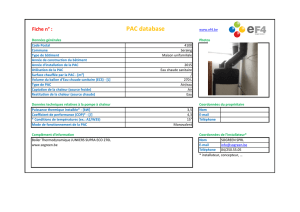
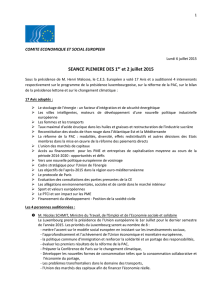
de commandes de vol récents et futurs étant électriques [BOT-00], [BOS-04], le profil de charge
à fournir par ce réseau de secours est très intermittent (Figure V.1)
demande en puissance électrique devient
inclure une turbine éolienne de plus en plus volumineuse. Des études récentes ont examiné le
remplacement de cette turbine par une pile à combustible [GAR-07]. De plus, un système à pile
-à-vis des propriétés du système RAT actuel
[WOR-09]: son fonctionnement est indépenda
à combustible peut être arrêtée à tout moment si les moteurs principaux sont récupérés alors
réduite.
Rappelons que la pile à combustible fait réagir indirectement (oxydoréduction) de

Chapitre V
201
[GAR-07 sène
[LEN-05], [IBA-06
ont été envisagés et évalués dans [GAR-07], la solution la plus pertinente dans le cas de
ion H2/02 qui est étudiée et validée expérimentalement
dans le présent chapitre.
technologie dans le monde aéronautique. ue des
CUR-10]. Une pile à
combustible pourrait remplacer la turbine à gaz qui réalise actuellement la fonction APU
que celui-ci est au sol. Cela
Plus généralement,
nergies fossiles (green taxi) ou encore la réutilisation des
« déchets
kérosène. En Allemagne, le projet ELBASYS étudie diverses applications autour de piles à
combustible [WOR-09] : groupe de secours, système pile à combustible multifonctions
ronautique semble devoir passer par une multifonctionnalité de façon à pouvoir rivaliser
avec les autres technologies actuelles très intégrées ainsi que détaillé au chapitre 1.
Etant donné le caractère très intermittent du profil de secours à satisfaire (Figure V.1), il
[ROB-11], [RAF-10] au regard de la durée des intermittences à satisfaire (pics de fortes
puissances mais relativement peu énergétiques). Dans le cas du groupe de secours à pile à
JIA-06].
2/Air, cela permet aussi de palier la dynamique de la compression
ZHA1-08].
Les travaux présentés dans ce chapitre
dans le cadre du projet européen CELINA (Fuel Cell Application in a New Configured
[GAR-07] pour associer la pile à combustible et les supercondensateurs. Le projet CELINA a
fait place au projet ISS (Innovative Solutions for Systems) dont une des finalités est la
validation expérimentale des architectures qui ont été retenues.
validation expérimentale que ce chapitre est présenté.
Après avoir détaillé les fonctionnements des architectures hybrides retenues pour le cahier
des charges de notre étude (40kW de puissance moyenne), nous présenterons leur pilotage

Essais de systèmes hybrides PAC/SC pour le projet ISS à puissances significatives
202
énergétique au plan théorique leur déclinaison pratique. Les détails des
ssais sur des systèmes hybrides PAC/SC à une
puissance moyenne de 5kW seront exposés et discutés. Enfin, la dernière partie sera consacrée à
la validation expérimentale qui a été menée à échelle réduite (1/8) : dans un premier temps
avec un émulateur de pile à combustible, puis dans un second temps avec une pile à
combustible.
5.1.2 Objectifs du projet CELINA
De nombreuses charges utilisées en dernier secours peuvent être considérées comme
constantes. En effet les équipements électroniques (calculateurs) et les éléments de dégivrage
absorbent une puissance constante et pendant toute la période de la mission de secours.
he, certaines charges sont très variables,
en particulier les actionneurs à commande de vol qui exigent une puissance très fluctuante,
dépendant des conditions de vol pendant la quasi-totalité de la mission.
n est réduite, ce qui impose de grands
consommation de forte
piste. La mission de
vol retenue (Figure V.1
comme la principale mission dimensionnante de notre étude [LAN-06], [GAR-07], c'est-à-dire
une puissance consommée fortement variable qui atteint les pics de consommation les plus
élevés.
Ce profil de mission comporte une puissance moyenne de 40kW ainsi que des pics de
consommation atteignant 70kW, soit une différence de 30kW entre puissance moyenne à fournir
Equation (V.1).
:
Equation
(V.1)
ires
fluidiques qui possèdent de faibles dynamiques de réponse, or en mission de secours la puissance
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
1
/
122
100%