Composants de l`électrotechnique en traction ferroviaire

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur D 5 530 − 1
Composants de l’électrotechnique
en traction ferroviaire
par Pierre CHAPAS
Senior expert (honoraire)
Alstom Transport
et Marc DEBRUYNE
Master expert
Alstom Transport
epuis son apparition en 1879 avec la première locomotive de Siemens,
l’électrotechnique s’est développée pour la traction ferroviaire au même
rythme que pour les autres secteurs industriels. Elle est ainsi l’un des arguments
majeurs du chemin de fer en termes de performances, de productivité et donc de
rentabilité économique. L’aspect environnemental est aussi l’une des motiva-
1. Architecture électrotechnique du matériel roulant ....................... D 5 530 — 3
1.1 Inventaire des fonctions.............................................................................. — 3
1.2 Chaîne de traction et auxiliaires................................................................. — 3
2. Production d’énergie .............................................................................. — 3
3. Captage et protections........................................................................... — 3
3.1 Pantographe................................................................................................. — 3
3.2 Ligne de toiture............................................................................................ — 5
3.3 Frotteur ......................................................................................................... — 5
3.4 Protections ................................................................................................... — 5
4. Adaptation de la tension alternative : transformateur ................. — 7
4.1 Transformateur et selfs ............................................................................... — 7
4.2 Refroidissement........................................................................................... — 7
4.3 Transformateur à moyenne fréquence ...................................................... — 7
5. Conversion électrique............................................................................. — 7
5.1 Différents types de convertisseurs et leurs applications.......................... — 7
5.2 Évolution et structure des convertisseurs ................................................. — 8
5.3 Refroidissement........................................................................................... — 9
5.4 Appareillage électromécanique.................................................................. — 10
6. Rhéostat de freinage............................................................................... — 11
7. Moteur de traction................................................................................... — 11
7.1 Installation.................................................................................................... — 11
7.2 Refroidissement........................................................................................... — 11
8. Auxiliaires .................................................................................................. — 12
8.1 Traction autonome ...................................................................................... — 12
8.2 Traction électrique ....................................................................................... — 12
9. Installation des composants................................................................. — 13
10. Conclusion ................................................................................................. — 14
Références bibliographiques ......................................................................... — 15
D

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
COMPOSANTS DE L’ÉLECTROTECHNIQUE EN TRACTION FERROVIAIRE ____________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
D 5 530 − 2© Techniques de l’Ingénieur
tions essentielles, quoique ancienne puisqu’à l’âge d’or de la traction à vapeur,
on parlait déjà du grave problème de la pollution que seule l’électricité pouvait
éliminer. Le transport ferroviaire est à ce titre aujourd’hui, et de très loin, le
champion du développement durable et du respect de l’environnement.
L’électrotechnique et l’électronique de puissance intéressent tous les
domaines ferroviaires, les installations fixes : alimentation en énergie, signalisa-
tion [D 5 501] [D 5 510], énergie utilisée par le matériel roulant (engins de trac-
tion et matériel remorqué), ainsi que l’ensemble des catégories de transports
ferroviaires : grande ligne, grande vitesse, matériels interurbains et urbains
(métros et tramways) [C 4 440].
Il est intéressant d’en étudier les différents aspects sous l’angle des compo-
sants utilisés et de leurs principes d’installation. Notre exposé adopte une
démarche fonctionnelle, laissant ainsi le champ à l’évolution très rapide des
composants de détail mis en œuvre. Partant de l’alimentation, nous analysons
les composants de la chaîne de traction et ses auxiliaires. Pour plus de détails, on
se reportera aux références bibliographiques [1] à [23].
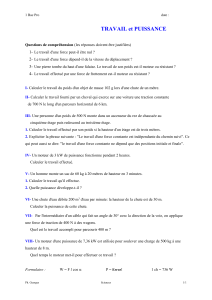
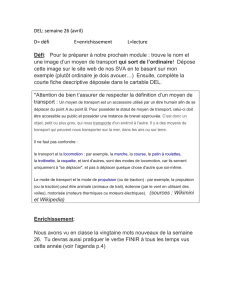
Pour faciliter la compréhension, un panorama succinct de l’historique des
composants électrotechniques montre l’évolution « non linéaire » de ceux-ci. La
figure A donne les principales phases. Durant plus d’un siècle, l’électromé-
canique associée au moteur à courant continu à collecteur a régné sans partage
sur la traction, atteignant même des sommets avec des locomotives de plus de
6 000 kW, construites en Suisse et en France. C’est seulement dans le dernier
quart du siècle dernier que l’électronique de puissance a « pris le pouvoir » et le
moteur asynchrone associé maintenant aux transistors IGBT s’étend de sorte
qu’il est devenu la norme de construction de tous les matériels.
Figure A – Évolution de l’électrotechnique ferroviaire
ComposantsMoteur
de traction
Alimentation
en énergie
IGBT
GTOThyristor
rapide
Diode de silicium
Diode de silicium
Diode silicium
Red.
Hg
Synchrone
Asynchrone
Rhéostat/couplages moteurs/graduateur
Série à collecteur universel
Série à collecteur dc
25 kV/50 Hz
15 kV/16 Hz 2/3 12 kV/25 Hz (États-Unis)
1 500 V/3 000 V dc
600 V/750 V dc
19001880 1920 1950 1970 1980 2000
Red. Hg redresseur à vapeur de mercure

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
____________________________________________________________________________ COMPOSANTS DE L’ÉLECTROTECHNIQUE EN TRACTION FERROVIAIRE
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur D 5 530 − 3
1. Architecture
électrotechnique
du matériel roulant
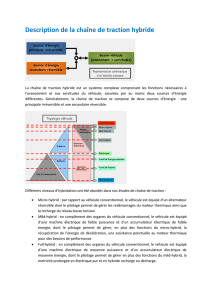
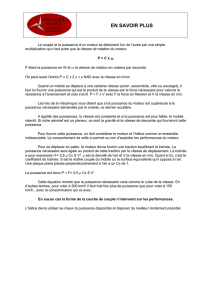
1.1 Inventaire des fonctions
L’étude du dimensionnement du matériel roulant [D 5 520] a
permis de faire l’inventaire des fonctions qu’il doit satisfaire
(figure 1).
1.2 Chaîne de traction et auxiliaires
L’électrotechnique et l’électronique de puissance ont leur place
dans les fonctions de traction/freinage dynamique et les auxiliaires
associés. Aussi l’architecture du matériel roulant est-elle construite
sur ces deux entités que l’on appelle « chaîne de traction » et
« auxiliaires ».
La chaîne de traction comprend l’ensemble des fonctions :
— production (§ 2) ou captage de l’énergie et protections (§ 3) ;
— transformation ou adaptation de l’énergie (§ 4) ;
— conversion et traitement de l’énergie (§ 5) ;
— génération de couple (§ 6 et 7).
Les services auxiliaires (§ 8), nécessaires à l’ensemble des autres
fonctions, sont, en terme d’énergie, directement associés à la four-
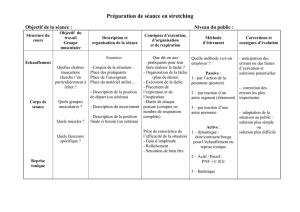
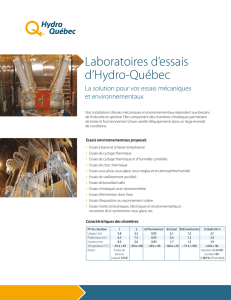
niture d’énergie principale. Pour les deux catégories de traction –
autonome et électrique –, la chaîne de traction et les auxiliaires peu-
vent être schématisés comme l’indique la figure 2.
Notons qu’une telle représentation est valable pour tous les types
de matériels moteurs ferroviaires : locomotive, automotrice, métro,
tramway. Seuls diffèrent les niveaux de puissance mis en jeu et l’ins-
tallation des équipements, tributaire des contraintes de masse, de
gabarit ou d’emplacements disponibles dans le cas du transport de
passagers (automotrices, métros, tramways).
2. Production d’énergie
En traction autonome, la production d’énergie est assurée par un
moteur thermique [D 5 510]. Le plus fréquemment utilisé est le
moteur Diesel suralimenté par turbocompresseur ; quelques cas
d’emploi de turbomoteurs sont à signaler. La transmission électri-
que est réalisée à partir d’un alternateur triphasé, attelé au vilebre-
quin du moteur Diesel. L’alimentation des auxiliaires est réalisée :
— soit grâce à un enroulement dédié, bobiné sur le stator de
l’alternateur ;
— soit par un alternateur auxiliaire flasqué sur l’alternateur
principal.
L’alternateur principal délivre une tension triphasée à fréquence et
tension variables, redressée par un pont à diodes triphasé.
Les schémas de puissance actuels font appel le plus générale-
ment aux moteurs asynchrones alimentés par des onduleurs à IGBT.
Ceux-ci sont en tous points identiques avec ceux utilisés par la trac-
tion électrique [D 5 510]. (0)
3. Captage et protections
3.1 Pantographe
Les engins moteurs parcourant les voies alimentées par ligne
aérienne « caténaire » sont équipés d’un appareil de prise de
Figure 1 – Inventaire des fonctions du matériel roulant
Contrôle-commande
Traction/freinage Traction
Freinage dynamique
Freinage mécanique
Production
Distribution
Essieux du bogie moteur
Essieux du bogie porteur
Motrice
Remorque/voiture
Confort de la motrice
Confort des passagers
Production
Traitement de l'énergie
pour le frein
Caisse/installation
Freinage
Auxiliaires
Roulement
Confort
Exploitation/conduite Interface homme-machine
Maintenance
Figure 2 – Schémas généraux de la chaîne de traction
et des auxiliaires
Captage
aérien Groupe électrogène
Protection
Auxiliaires Auxiliaires
Conversion
adaptation
Conversion
adaptation
Moteur
Transmission
Captage
au sol
(métros)
atraction électrique btraction autonome à
transmission électrique
Transformation
ou

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
COMPOSANTS DE L’ÉLECTROTECHNIQUE EN TRACTION FERROVIAIRE ____________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
D 5 530 − 4© Techniques de l’Ingénieur
courant appelé « pantographe », appellation ancienne venant de la
similitude avec l’appareil reproducteur de dessin de jadis, dont la
forme était un losange. Les premiers pantographes avaient effecti-
vement la forme d’un losange déformable.
Les fonctions dévolues au pantographe sont d’ordre électrique et
mécanique.
3.1.1 Fonctions électriques
Le courant total absorbé par l’engin de traction doit être capté
avec la résistance de contact minimale pour limiter les pertes donc
l’échauffement, notamment à l’arrêt et au démarrage. Le dimension-
nement résulte du bilan de puissance comprenant :
— l’intensité maximale en traction ;
— la puissance des auxiliaires ;
— les pertes.
C’est l’« archet », comportant une ou deux « palettes » sur les-
quelles sont fixées des « barres de frottement » en contact avec la
caténaire, qui assure cette fonction. Des cornes isolantes de part et
d’autre de l’archet l’isolent par rapport aux pièces environnantes
sous tension. Le choix du matériau des barres de frottement dépend
de la tension d’alimentation et du courant absorbé : cuivre + acier,
ou carbone. Le tableau 1 donne quelques exemples d’intensité
absorbée.
Le courant est conduit par le cadre du pantographe et des shunts
appropriés pour éviter son cheminement à travers les roulements à
billes des articulations du cadre du pantographe.
3.1.2 Fonctions mécaniques
Les impératifs à satisfaire sont :
— plan de contact indépendant des mouvements subis par le
pantographe ;
— inertie la plus faible possible ;
— effort de contact constant quel que soit le développement ;
— sensibilité aux efforts aérodynamiques telle que la pression de
contact croît dans une limite admissible.
Suivant les conditions de déplacement du pantographe et
l’influence du vent, le contact peut être perturbé, provoquant un
« décollement » ponctuel de l’archet ; il y a rupture brusque du con-
tact et naissance d’un arc entre archet et fil de contact, entraînant sa
dégradation rapide.
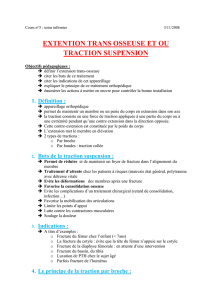
Ces fonctions mécaniques sont assurées par :
— un cadre articulé portant l’archet et fixé sur la toiture de l’engin
par des isolateurs (figure 3) ;
— un mécanisme de commande.
Le principe de la commande pneumatique avec ressorts est le sui-
vant (figure 4). En position « baissée », le ressort du servomoteur de
commande équilibre l’effort des ressorts de montée agissant sur le
cadre articulé. La montée s’opère par admission d’air comprimé
dans le servomoteur. La bielle de commande exerce un effort supé-
rieur à celui du ressort de descente Rd ; les ressorts de montée Rm
participent au déploiement du cadre articulé jusqu’au contact de
l’archet avec la caténaire. Les ressorts de montée maintiennent une
pression constante, quelle que soit la hauteur du fil de contact.
Pour effectuer la descente, la chambre du servomoteur est mise à
l’atmosphère de sorte que l’effort exercé par le ressort de descente
Rd soit prédominant et la bielle de commande entraîne le repli du
cadre. Avant la fin de course, un dispositif amortisseur intégré à
l’électrovalve évite tout choc. La sécurité est assurée par manque
d’air ; l’action du ressort Rd provoque la descente du pantographe.
La commande par servomoteur pneumatique seul est assurée
directement par la régulation de l’admission d’air.
Tableau 1 – Intensité absorbée aux pantographes pour différents systèmes d’électrification
et différentes catégories de matériels moteurs
750 V continu 1,5 kV continu 3 kV continu 15 kV/16,7 Hz 25 kV/50 Hz
Locomotive
6 MW traction + 1 MW auxiliaires 4 660 A 2 330 A 460 A 280 A
Motrice TGV
4,4 MW traction + 1 MW auxiliaires 3 300 A 1 660 A 330 A 200 A
Automotrice
2 MW + 0,2 MW auxiliaires 1 460 A 735 A 145 A 88 A
Tramway 800 A
Figure 3 – Nomenclature du pantographe
Figure 4 – Fonctionnement de la commande pneumatique associée
aux ressorts
Servomoteurs
pneumatiques
Fils de contact
Isolateurs
Ressorts
Cadres articul
Cadres articul
ésCadres articulés
Archets
acommande par servomoteur
pneumatique et ressorts bcommande par servomoteur
pneumatique seul
Rm
Air comprimé
Rd

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
____________________________________________________________________________ COMPOSANTS DE L’ÉLECTROTECHNIQUE EN TRACTION FERROVIAIRE
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur D 5 530 − 5
3.2 Ligne de toiture
Elle rassemble, outre le ou les pantographes, les appareils haute
tension tels que : disjoncteur monophasé, commutateur mono-
phasé – continu pour les engins multitensions, parafoudres, mise à
la terre de la ligne de toiture, barres de connexion et traversées de
toiture conduisant le courant dans le compartiment machine. Son
schéma de principe et son installation sont représentés sur la
figure 5.
Dans le cas des rames à grande vitesse de 8 ou 10 remorques en
France, la contrainte à respecter est le soulèvement admissible de la
caténaire sous la pression de plusieurs pantographes, espacés de
200 m. Sous caténaire monophasée 25 kV, l’alimentation est assu-
rée par un seul pantographe d’une des deux motrices. Une ligne de
toiture, constituée d’un câble isolé 25 kV, parcourt la totalité de la
rame. Un sectionneur HT, sur l’une des remorques extrêmes, permet
d’isoler une motrice du reste du train en cas de panne de l’une
d’elles.
Sous tension continue, la vitesse est limitée à 220 km/h, chaque
motrice est autonome et utilise son propre pantographe spécialisé à
la tension 1,5 kV (figure 6).
3.3 Frotteur
Utilisée essentiellement par les transports urbains en tunnel, la
prise de courant par frotteur et conducteur latéral est bien adaptée
aux tensions basses de 600 V ou 750 V. Les fonctions électriques et
mécaniques sont identiques au pantographe.
La partie mécanique n’a pas de contrainte aérodynamique
compte tenu des faibles vitesses pratiquées. Le support de la partie
frotteur est un cadre articulé en losange, comme un pantographe de
petite dimension, actionné par un dispositif pneumatique. La
semelle de prise de courant est soit en acier, soit garnie de bandes
en carbone (figure 7).
Le franchissement des « lacunes » de conducteurs latéraux au
droit des appareils de voie est assuré grâce à la présence de quatre
frotteurs par véhicule moteur, assurant ainsi la continuité d’alimen-
tation (figure 8).
Dans le cas de métros sur pneumatiques (cas des lignes 1 et 6 de
Paris, métro de Lyon, Montréal, par exemple), les rails de guidage
latéraux sont utilisés comme conducteurs positifs sur lesquels vien-
nent en contact les semelles des frotteurs, comme indiqué sur la
figure 9. Le retour de courant s’effectue par frotteurs sur les rails de
roulement puisque les roues de secours métalliques ne sont norma-
lement pas en contact avec les rails de roulement.
3.4 Protections
Les protections électriques de l’engin moteur sont assurées par des
appareils de coupure rapide, d’isolement et de mise à la terre : dis-
joncteur, sectionneur de mise à la terre, parafoudre, mise à la masse.
3.4.1 Disjoncteur
C’est un appareil de coupure en charge sur défauts tels que :
surintensité, court-circuit, mise à la terre accidentelle. Son dimen-
Figure 5 – Exemple de ligne de toiture. Schémas de principe
et installation
Figure 6 – Configuration du captage des rames à grande vitesse
françaises de 8 ou 10 remorques
Pantographe monophasé
Parafoudres
Commutateur
monophasé/continu
Pantographe continu
Mise à la terre
Disjoncteur
monophasé
Deux rames en unités multiples sous 25 kV
Un pantographe en service par rame
Deux rames en unités multiples sous 1,5 kV
Un pantographe en service par motrice
Figure 7 – Prise de courant par frotteur et conducteurs latéraux
Figure 8 – Franchissement des lacunes
Figure 9 – Captage et retour de courant dans le cas du métro
sur pneumatiques
Poignée d'isolement
Poutre
Semelle
Conducteur latéral
Frotteur positf
Rails
fer
Rails de guidage
et conducteurs
Frotteur de retour sur rail fer
Bogie
Pistes de
roulement
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%