Recherche Opérationnelle 1A Théorie des graphes


Connexit´e
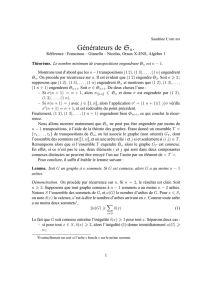
Lemme 1
Si eest une arˆete d’un cycle Cd’un graphe connexe G,alors G−eest
connexe.
D´emonstration
1∀x,y∈V(G),il existe une (x,y)-chaˆıne Pcar Gest connexe.
2Si e/∈E(P),alors Pest une (x,y)-chaˆıne dans G−e.
3Si e∈E(P) alors en rempla¸cant dans Pl’arˆete epar la chaˆıne C−e
on obtient une (x,y)-chaˆıne P′dans G−e.
4G−eest donc connexe.
C
e
xy
P
P′
Z. Szigeti (G-SCOP, Grenoble) RO 1A 1 / 13


Arbres : propri´et´es utiles
Lemme 2
Soit Gun arbre `a n≥2 sommets.
(a) Gcontient un sommet de degr´e 1.
(b) En supprimant un sommet vde degr´e 1 de Gon obtient un arbre.
D´emonstration
(a) 1Puisque Gest connexe et n≥2, par l’EXO 2.3, ∀v∈V:d(v)≥1.
2Puisque Gest sans cycle, par l’EXO 2.6(b), ∃u∈V:d(u)≤1.
3Par cons´equent, d(u) = 1.
(b) 1G−vest connexe : ∀u,w∈V(G−v),
1puisque Gest connexe, ∃(u,w)-chaˆıne ´el´ementaire Pdans G,
2par v6=u,w,d(x) = 2 ∀x∈V(P)\ {u,w}et d(v) = 1, v/∈V(P),
3d’o`u Pest une (u,w)-chaˆıne dans G−v.
2G−vest sans cycle : puisque Gest sans cycle.
3G−vest donc un arbre.
Z. Szigeti (G-SCOP, Grenoble) RO 1A 3 / 13

Arbres : nombre d’arˆetes
Th´eor`eme 1
Le nombre md’arˆetes d’un arbre `a nsommets est ´egal `a n−1.
D´emonstration
1Par r´ecurrence sur n.
2Si n= 1,alors m= 0 = 1 −1 = n−1.
3On suppose que c’est vrai pour tous les arbres `a n−1≥1 sommets.
4Soit Gun arbre `a nsommets.
5Par Lemme 2, ∃v∈V(G) : d(v) = 1, et G′=G−vest un arbre
6tel que m′=m−1et n′=n−1.
7En vertu de l’hypoth`ese de r´ecurrence: m=m′+ 1 =n′=n−1.
Z. Szigeti (G-SCOP, Grenoble) RO 1A 4 / 13
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%