Démarrage des moteurs a courant continu

Page 1 sur 13
COURS N° 4 : Démarrage des
moteurs à courant continu
DÉROULEMENT DE LA SÉANCE
TITRE
ACTIVITÉS PROF
ACTIVITÉS ÉLÈVES
DURÉE
FIN DU COURS {? heures}

Page 2 sur 13
Tableau de comité de lecture
Date de lecture
Lecteurs
Observation
Remarques rédacteur
Date modifications
14 octobre 2000
Première Version
14 octobre 2000
3 décembre 2001
CROCHET David
Mise à jour des données de cette page (mail + adresse)
3 décembre 2001
Quote of my life :
Fournir ma contribution aux autres est ma philosophie.
Et la vôtre ?
Si vous avez lu ce T.P. et que vous avez des remarques à faire, n'hésiter pas et écrivez-moi à l'adresse suivante :
Ce dossier contient :
Un dossier élève (pages 4 à 8)
Un dossier prof (pages 9 à 13)
Un transparent (page - à -)
E-Mail :
Crochet.david@free.fr
Adresse Professionnel :
CROCHET David
Professeur de Génie électrique
Lycée Joliot CURIE
Place du Pigeon Blanc
02500 HIRSON
(Adresse valable jusq'au 30 juin 2002

Page 3 sur 13
COURS N° 4
Démarrage des moteurs à courant continu
Niveau : T STI GET
Lieu : Salle de cours
Durée : ? heures
Organisation : Classe entière
LIAISON AU RÉFÉRENTIEL
PRÉ-REQUIS
Les élèves doivent être capables :
-
OBJECTIFS
Les élèves devront être capables de :
-
NIVEAU D'APPRENTISSAGE
MÉTHODE
- Passive

Page 4 sur 13
S.T.I. - G.E.T.
B 2 – ÉLECTROTECHNIQUE
COURS
N° 4
LES MOTEURS
DOSSIER PÉDAGOGIQUE
D
Dé
ém
ma
ar
rr
ra
ag
ge
e
d
de
es
s
M
Mo
ot
te
eu
ur
rs
s
à
à
C
Co
ou
ur
ra
an
nt
t
C
Co
on
nt
ti
in
nu
u
Objectif :
Documents :
Secteur : Salle de cours Durée : ? heures

Page 5 sur 13
Le Démarrage des Moteurs à Courant Continu
1. Principe
Le courant absorbé par un moteur à courant continu est donné par la loi d' :
U = E' + RI
R : Résistance de l'induit []
E' : Force contre électromotrice [V]
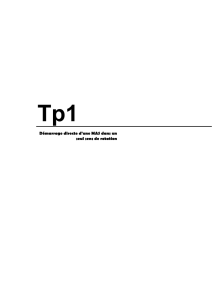
1.1. En fonctionnement normal
Le courant absorbé en fonctionnement est :
REU
In
1.2. Au démarrage
À la mise sous tension et au décollage, la
vitesse du moteur est nulle, donc la f.c.e.m. aussi.
Le courant au démarrage n'est donc plus limité que
par la valeur de la résistance d'induit (R) d'où :
R
U
In
1.3. Exemple
Soit un moteur à courant continu dont les caractéristiques principales sont les
suivantes :
Uinduit : 120 V
P = 3,6 kW
Rinduit : 0,2
A 600
0,2
120
R
U
IA 30
U
P
Idn
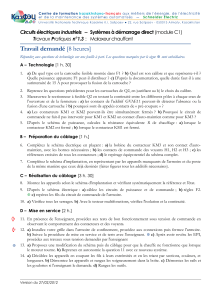
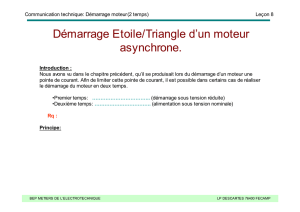
1.4. Limitation du courant de démarrage
Nous venons de voir dans l'exemple que l'intensité de démarrage est de 20 In, c'est
une valeur trop importante. Pour limiter cette pointe d'intensité au démarrage, nous
insérons, en série avec l'induit du moteur, des résistances, qui permettront de limiter
cette pointe. Ces résistances sont appelées Résistances de démarrage. Grâce à ces
résistances, nous pourrons limiter le courant de démarrage (Id) entre 1,2 à 2 fois
l'intensité nominale (In).
R
E'
U
+
-
I
R
U
+
-
Id
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%