Chapitre IV

TEC586 Microcalculateurs
Chapitre IV Conception d’un processeur de base
Option contrôle
1
Chapitre IV
C
Co
on
nc
ce
ep
pt
ti
io
on
n
d
d’
’u
un
n
p
pr
ro
oc
ce
es
ss
se
eu
ur
r
d
de
e
b
ba
as
se
e
I Introduction :
Les éléments vus dans les chapitres I , II, et III seront utilisés dans ce chapitre, afin de
concevoir un processeur de base, possédant une structure simple, mais complète.
Un processeur classique est principalement réalisé à partir de circuits logiques ; le chapitre I
nous a permis de revoir, et recenser les circuits combinatoires, et séquentiels de base
essentiels pour la réalisation de tout circuit logique.
Dans un processeur, ou unité centrale de traitement, les informations stockées dans les
registres sont traitées, et subissent des opérations arithmétiques, logiques, de transfert, ou de
décalage ; le langage de transfert inter registres a été défini, et il a été montré comment les
circuits réalisant ces différentes opérations, sont décrits par le langage symbolique LTR.
Le chapitre III a montré différentes organisations classiques de processeurs à usage général
concernant les structures de bus, les modes d’adressage, l’organisation des registres, les
répertoires d’instructions…
Dans ce chapitre des choix , des hypothèses préliminaires seront faits concernant
l’organisation, le répertoire d’instructions et la puissance du processeur à concevoir.
Le langage de transfert inter registres, décrira les circuits des opérations qui seront exécutées à
chaque impulsion d’horloge , pour chaque instruction. Les différents modules constituant le
processeur de base seront construits pour être ensuite assemblés pour former le processeur de
base.
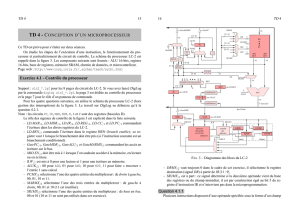
Choix du type de
processeur
et Hypothèses
Description de ses micro
opérations en LTR
Construction du circuit
Chapitre 111
Chapitre 11
Chapitre 1
Choix d’une
organisation
Initiation au
langage de
transfert inter
registre LTR
Rappel des
principaux
circuits
Etapes de conception et de réalisation du Processeur de base

TEC586 Microcalculateurs
Chapitre IV Conception d’un processeur de base
Option contrôle
2
II Les hypothèses
Le processeur de base étant un processeur didactique, il ne sera pas nécessaire de le doter de
puissance, vu que cela compliquerait ses circuits (on peut noter cependant, qu’un processeur
puissant tel que le Pentium, ou le Power PC, est constitué d’unités relativement simples
fonctionnant en parallèle ; le principe adopté pour la conception du processeur de base reste
donc valable et sera accompagné d’outils de CAO de plus en plus disponibles et modernes).
Les hypothèses suivantes seront donc émises
1. L’organisation des registres : on choisira la plus simple, soit l’organisation à
Accumulateur.
2. La mémoire centrale : sera de 4Kx16
3. Organisation de bus :
Le registre MAR sera utilisé pour gérer le bus d’adresse de la mémoire
Le registre MDR sera utilisé pour gérer le bus de données de la mémoire
Le bus d’Entrée/Sorties : sera géré en entrée par le registre d’entrées INPR et
en sortie par le registre de sortie OUTR et sera de 8 bits.
4. Les modes d’adressage : on en choisit 2 : le mode Direct et le mode indirect
(Remarque : un troisième mode, immédiat, sera introduit plus tard, car, bien que
nécessaire, il ne respecte pas certaines des hypothèses émises dans ce paragraphe).
5. Une instruction occupe un seul mot, ou case mémoire.
6. Un répertoire d’instructions : réduit mais complet, permettra d’exécuter
n’importe quelle tâche, moyennant le programme adéquat ; il sera défini plus loin dans ce
chapitre, et sera composé d’instructions:
arithmétiques
logiques
de transfert
de décalage
d’entrées / Sorties

TEC586 Microcalculateurs
Chapitre IV Conception d’un processeur de base
Option contrôle
3
II Conséquences des Hypothèses
1. La taille des registres
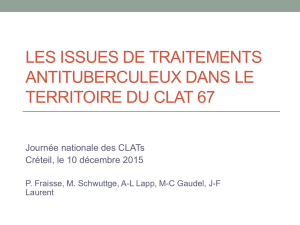
Le processeur de base est constitué des éléments suivants :
Le processeur possède une organisation à accumulateur : donc l’UAL recevra à sa
première entrée, l’accumulateur, et à sa seconde entrée le MDR (chargé de la donnée lue
de la mémoire.
La RAM est de 4Kx16 : elle possède donc 4x1024 mots de 16 bits, soit 12 lignes
d’adresse, et 16 lignes de données. Ainsi tous les registres d’adresse (PC, MAR) seront à
12 bits, et tous les registres de données, seront à 16 bits.
Une instruction est dans un seul mot de la mémoire qui est de 16 bits : le registre
d’instructions RI est sur 16 bits.
Le bus d’E/S est de 8 bits : les registres INPR et OUTR sont donc sur 8 bits
Unité
De
contrôle
AC
MDR
1 16
1 16
RI
1 16
MAR
1 12
PC
1 12
OUTR
1 8
INPR
1 8
Unité centrale
Périphériques
Mémoire
centrale
Principaux éléments du processeur de base

TEC586 Microcalculateurs
Chapitre IV Conception d’un processeur de base
Option contrôle
4
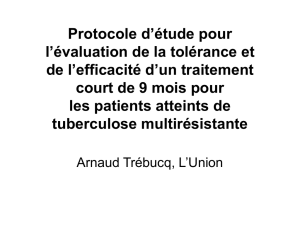
2. Le format des instructions
Le processeur ayant une organisation à AC, possède alors, une seule zone d’adresse comme le
montre la figure ci-dessous :.
M : est sur un seul bit puisqu’on a 2 modes d’adressage ; on l’appellera I pour le
processeur de base.
La mémoire étant de 4Kx16, les adresses sont de 12 bits, et donc la zone d’adresse
occupera 12 bits.
Le code OP occupera les bits restants, soit 3 bits
Problème : On peut à première vue définir uniquement 23 = 8 instructions, ce qui ne
permettra pas la création d’un répertoire d’instructions complet
Solution : On utilise le fait qu’on puisse classer les instructions selon trois types :
Type 1 : Instructions à référence mémoire ou IRM : ces instructions ont besoin d’un
opérande en mémoire, et doivent donc indiquer son adresse, et le mode d’adressage à
utiliser. Les 16 bits de l’instruction sont utilisés.
Exemple : ADD M(x) ; AC<- (AC)+ M(x) où x est l’adresse de l’opérande
Type 2 : Instructions à référence registre ou IRR : ces instruction n’ont besoin que
des informations stockées dans les registres de l’unité centrale. Elles n’ont pas besoin de
spécifier d’adresse ni de mode d’adressage. Les bits de la zone d’adresse, et du mode
d’adressage peuvent avoir une autre fonction.
Exemple : CLA ; AC <- 0
Type 3 : les instructions d’entrée/sortie ou IES : Ces instructions n’ont pas besoin de
spécifier d’adresse ni de mode d’adressage, puisqu’elles permettent de s’adresser en
entrée ou en sortie aux périphériques.
Exemple : IN portA ; AC <- donnée provenant d’un périphérique par le port A
On remarque donc que l’adresse et le bit de mode ne sont pas demandés par toutes les
instructions. Cette propriété sera utilisée ci-dessous pour codifier les instructions.
M
OP
ADR
1
12

TEC586 Microcalculateurs
Chapitre IV Conception d’un processeur de base
Option contrôle
5
IV Distinction et codification des IRM, IRR, et IES
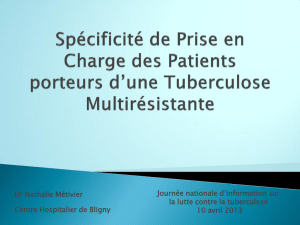
1. Distinction des IRM, IRR, IES
C’est le code OP qui doit permettre à l’unité de contrôle de reconnaître une instruction de
façon unique.
On utilise une des 8 combinaisons du code OP, 111 par exemple, pour différencier les IRM
des autres instructions : Si OP = 111 alors l’instruction n’est pas une IRM .
Si OP ≠ 111 : l’instruction est une IRM, et les 16 bits de l’instruction sont utilisés, I
pour le mode d’adressage, OP 3 bits pour définir une instruction IRM, et les 12 bits
restants spécifient l’adresse à utiliser.
Si OP = 111 : l’instruction n’est pas une IRM ; elle est soit de type IRR soit IES ;
puisque le bit de mode I est libre on l’utilise pour différencier les 2 types
Si I = 0 c’est une IRR : et les 12 bits de la zone d’adresse sont utilisés pour
déterminer laquelle. On voit qu’il est possible de définir 212 instructions différentes, on
se contentera d’en définir 12.
Si I= 1 c’est une IES : et les 12 bits de la zone d’adresse sont utilisés pour
déterminer laquelle. On voit qu’il est possible de définir 212 instructions différentes ,
on se contentera d’en définir 4.
OP=111
I=1
IE/S
IRR
IRM
N
N
O
O
Distinction entre les IRM, IRR, et IES
1
111
OP IES
I
OP≠111
ADR
0
111
OP IRR
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
1
/
35
100%