Mouvement de translation rectiligne

CINEMATIQUE DU POINT
582644175 1/3
Mouvement de translation rectiligne
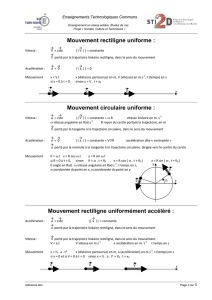
1 Représentation d’un mouvement de translation rectiligne
to t1 t2 t3 temps
vitesse linéaire
ou
vitesse angulaire
phase 1 phase 2
phase 3
Phase 1: La vitesse augmente, on appellera ce mouvement un
mouvement uniformément accéléré (l’accélération reste
constante pendant toute la durée du mouvement )
Phase 2: La vitesse reste constante, on appellera ce
mouvement un mouvement uniforme ( l’accélération est nulle
)
Phase 3:La vitesse décroît, on appellera ce mouvement un
mouvement uniformément décéléré ( l’accélération reste
constante pendant tout le mouvement
2 Mouvement rectiligne uniformément varié de M (S) / 0:
( / )M S x Cste
0 0
Mouvement uniformément accéléré (>0)
Mouvement uniformément décéléré (<0)
Position
Vitesse
Accélération
O M x x
0 0
V M S v x
( / )
0 0
( / )M S x
0 0
x t v t x
1
220 0
v t v 0
Cste
avec
vdx
dt
où
x O M0
Relation indépendante du temps entre x et v :
2
0
2
0vv)xx(2
3 Mouvement rectiligne uniforme de M (S) / 0:
( / )M S 00
Position
Vitesse
Accélération
O M x x
0 0
V M S v x
( / )
0 0
( / )M S 00
x v t x 0
v Cste
0
(S)
M
O0
x0
V M S
( / )
0
( / )M S 0
(S)
M
O0
x0
V M S
( / )
0
( / )M S 0
( / )M S 0
est porté par (O0,
x0
)
x

CINEMATIQUE DU POINT
582644175 2/3
Mouvement de rotation autour d’un axe fixe
1- Repérages Soit M(S) un point quelconque du solide(S).
Soit R
)z,y,x,O(
le repère dans lequel est étudié le mouvement de rotation de (S).
M décrit cercle (MS/0) de centre H et de rayon :
ROM
n
: normale à la trajectoire et orienté vers l’extérieur de la trajectoire (MS/).
t
: tangente en M à la trajectoire (MS/) et orienté dans le même sens de la trajectoire.
2- Mouvement circulaire uniformément varié
Définition : Le mouvement circulaire de M est dit uniformément varié si la mesure algébrique de l'accélération
angulaire de M est constante:
Cste
dt
d
'" 2
2
Position
Vitesse
Accélération
nROM
t'R)/SM(V
tn
)/SM(
00
2t't"
2
1
)t(
0
't")t('
" ' Cste
'²R
n
''R
t
Relation indépendante du temps entre et’ :
2
0
2
0'')(''2
Représentation vectorielle
Mouvement circulaire uniformément accéléré
Mouvementcirculaire uniformément décéléré
3- Mouvement circulaire uniforme
Définition: Le mouvement circulaire de M est dit uniforme si la mesure algébrique de la fréquence de rotation de
M est constante:
Cste
dt )t(d
)t('
Position
Vitesse
Accélération
nROM
tR)/SM(V
n
)/SM(
0
t)t(
' Cste
"0
'² ²
nRR
Représentation vectorielle
n
R/SM
V
n
R
s(t)
x
y
O
M
(MS/)
y
x
n
t
R
O
M
L
R
s(t)
x
y
O
M
)/SM(
t
n
R/SM
V
n
R/SM
V
R
s(t)
x
y
O
M
)/SM(
t
n
n

CINEMATIQUE DU POINT
582644175 3/3
Vecteur vitesse, vecteur accélération
d’un point d’un solide
1- Vecteur vitesse d’un point d’un solide
La position d'un point M S / R est définie par:
OM(t) = X(t) i + Y(t) j + Z(t) k
La vitesse de M
S/R:
VdOM t
dt X t i Y t j Z t k
M S R
/' ' '
( ) ( ) ( ) ( )
)²(')²(')²('
/tZtYtXV RSM
Le vecteur vitesse peut aussi s’écrire :
V v t
M S R
/0
, avec
t
vecteur unitaire sur la tangente de la trajectoire.
Propriétés:
Le vecteur vitesse du point M (S) à l’instant t, par rapport à 0 est tel que:
- son support est la tangente en M à la trajectoire (MS/0),
- son sens est celui du mouvement.
2- Vecteur accélération d’un point d’un solide
On appelle vecteur accélération à l’instant t du point M
S, dans son mouvement par rapport à R le vecteur
dérivé du vecteur vitesse de M par rapport au temps.
ktZjtYitX
dt tOMd
dt
Vd RSM
RSM
)()()(
)( ''''''
2
2
/
/
Coordonnées cartésiennes (fonction du temps):
)(''
)(''
)(''
/tz
ty
tx
RSM
à chaque instant t nous avons:
)()()(/ '²''²''²'tttRSM zyx
Unité d’accélération: m/s²
Le vecteur accélération peut aussi s’écrire :
n
R
v
t
dt
dv
RSM
2
/
En remplaçant par v = R ω
2
/M S R R t R n
L’accélération du point M est composée de deux parties:
- dv/dt portée par la tangente à la courbe au point M est appelée accélération tangentielle notée
t
.
- v2/R portée par un vecteur normal à la tangente au point M et orientée vers la concavité de la courbe est
appelée accélération normale
n
.
Mt n
t n
M t n
2 2
yo
(to)Mo
xo
i
k j
Oo
(t) M
(t’) M’
zo
(MS/R0)
t
M
n
t
n
(S)
M (S)
M0
(t0)
(t)
x0
y0
z0
O0
(MS/0)
t
(t’)
M’
1
/
3
100%