I Equations de droites

Chap 8 : Droites et systèmes
I Equations de droites :
Le plan est muni d’un repère (O ;
i
,
j
) orthonormal
1) Définitions
Théorème : Toute droite du plan à une équation de la forme :
pmxy
où m et p sont deux nombres réels, si elle est non parallèle à l’axe des ordonnées.
kx
où k est un réel, si elle est parallèle à l’axe des ordonnées.
Rq : - toute droite du plan admet une unique équation de la forme
pmxy
et cette équation est
appelée équation réduite de la droite
- m est le coefficient directeur
- p est l’ordonnée à l’origine
Exemples :
y=
1
2
1x
2x
x
y
-4
-3
-2
-1
0
1
2
3
4
-2
-1
1
2
3
4
x
–4
2
f(x)
–1
2
x
y
-4
-3
-2
-1
0
1
2
3
4
-2
-1
1
2
3
4
2) Déterminer l’équation d’une droite :
a) A partir de deux points
Trouver l’équation de la droite D passant par A(-1 ;3) et B(4 ;5)
Calcul du coefficient directeur m :
5
2
14 35
AB
AB xx yy
m
Calcul de l’ordonnée à l’origine p :
On a l’équation
pmxy
Or le point A appartient à la droite D donc ces coordonnées vérifient l’équation
on a donc
pmxyAA
(Remarque on peut aussi utiliser le point B)
d’où
5
17
5
2
31
5
2
3 AA mxyp
L’équation de D est donc :
5
17
5
2 xy

b) A partir d’un point et d’un vecteur directeur
Trouver l’équation de la droite D passant par A(-1 ;-2) et de vecteur directeur
1
2
u
Soit M(x ;y) un point de la droite D
Les vecteurs
AM
et
u
sont colinéaires on en déduit donc que leurs coordonnées sont
proportionnelles :
1
2
u
et
2
1
2
1
y
x
y
x
yy
xx
AM
AM
AM
On a donc (voir chapitre 4 sur les vecteurs)
2
3
2
32
0142
0142
01122
x
y
xy
xy
xy
xy
L’équation de la droite D est donc :
2
3
2 x
y
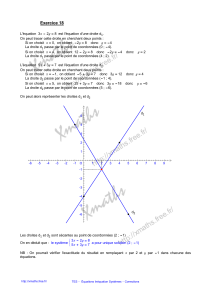
c) A partir de la représentation graphique
Trouver l’équation de la droite D dont la représentation graphique est :
x
y
-3
-2
-1
0
1
2
3
-2
-1
1
2
3
4
5
+1
-3
La droite coupe l’axe des ordonnée au point d’ordonnée 2. La valeur de p est donc 2
Ensuite graphiquement on constate que si le déplacement horizontal vaut +1(flèche bleue)
Alors le déplacement vertical vaut -3 (flèche verte)
La valeur de m est donc -3
L’équation de la droite D est donc :
23 xy

3) Parallélisme de deux droites :
Théorème : Les droites D et D’ d’équations respectives
pmxy
et
'' pxmy
sont parallèles si et
seulement si m=m’
Remarque : Si p=p’ alors D et D’ sont confondues.
Si p
p’ alors D et D’ sont strictement parallèles.
Exemple : les droites d’équation
43 xy
et
23 xy
sont parallèles.
Soit D :
43 xy
et le point A(-2 ;5) Déterminer l’équation de la droite D’ parallèle à D et
passant par A.
D’ a une équation de la forme
'' pxmy
Calcul du coefficient directeur
D et D’ sont parallèles donc en appliquant le théorème précédent on en déduit que
3' m
L’équation de D’ est :
'3 pxy
Calcul de l’ordonnée a l’origine
Le point A appartient à la droite D’ donc ces coordonnées vérifient l’équation
on a donc
'3 pxy AA
d’où
12353' AA xyp
Equation de D’
D’ a pour équation :
13 xy
II Systèmes d’équations :
1) Définition
Def : On appelle système de deux équations linéaires à deux inconnues tout système qui peut se mettre
sous la forme : { ax + by = c;a’x + b’y = c’ où a, b, c, a’, b’, c’ sont des réels donnés.
Def : Une solution d’un tel système est un couple (x ; y) tels que (x ; y) soit solution de chacune des deux
équations.
Def : Résoudre un système c’est déterminer tous les couples solutions du système.
Exemple :
{ 2x + 3y = 11;3x – 5y = 7 est un système linéaire. Le couple (4 ; 1) est une solution de ce système.
En effet
111342
et
71543
2) Existence et nombre de solutions

Théorème : Soit le système linéaire { ax + by = c;a’x + b’y = c’
1) Si
0'' baab
, alors ce système admet une unique solution.
2) Si
0'' baab
, alors ce système admet soit aucune solution, soit une infinité de solutions.
Def : La quantité ab’-a’b est appelée déterminant du système.
Exemples :
On revient sur le système de la partie 1)
{ 2x + 3y = 11;3x – 5y = 7
On calcule le déterminant de ce système :
01933)5(2
Donc on en déduit, en utilisant le théorème précédent, que le système admet une unique solution.
Rq : On a vu que (4 ; 1) était une solution de ce système, on en déduit donc que cette solution est unique.
Soit le système :
23810
745
yx
yx
Ce système a pour déterminant
010)4()8(5
Donc on en déduit, en utilisant le théorème précédent, que le système admet soit aucune solution, soit une
infinité de solutions.
Voir Module partie 1
3) Interprétation graphique
Soit le système (S) { ax + by = c (1);a’x + b’y = c’ (2)
Les équations (1) et (2) du système sont les équations de deux droites (D1) et (D2) dans le repère
(O ;
i
,
j
).
Def : Dire qu'un couple (x, y) est solution du système (S) revient donc à dire que le point M de
coordonnées (x ; y) est un point d'intersection des deux droites.
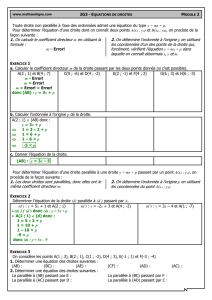
On a donc les trois cas de figure suivants :
determinant 0
determinant = 0
Les droites (D1) et (D2) sont
sécantes.
Les droites (D1) et (D2) sont
strictement parallèles.
Les droites (D1) et (D2) sont
confondues.
Le système (S) admet une
unique solution.
Le système (S) n'a pas de
solution.
Le système (S) admet une
infinité de solutions.
4) Résolution d’un système
(D2)
(D1)
(D2)
(D1)
(D2)
(D1)

a) Cas où
0'' baab
On est donc dans le cas où le système admet une unique solution (voir 2). On peut utiliser deux
méthodes vues en troisième pour résoudre le système : méthode par combinaisons linéaires et méthode
par substitution.
Exemple 1 : Méthode par combinaisons linéaires
Résoudre le système (S1) { 7x – 6y = 12;5x + 3y = 11 ×5;×(–7)
det (S1) = 7×3 – 5×(–6) = 21 + 30 = 51
0 donc (S1) admet une solution unique.
Déterminons cette solution en multipliant les deux équations par des coefficients bien choisis qui
permettent d’« éliminer » les termes en x.
(S1) { 7x – 6y = 12;5x + 3y = 11
×5;×(–7)
(S1) équivaut à
{ 35x – 30y = 60;–35x – 21y = –77
On en déduit –51y = –17
y = Error! =
Error!
On remplace y par sa valeur
dans l’une des équations :
12
3
1
67
x
147x
D’où
2x
Error!
Exemple 2 : Méthode par substitution
Résoudre le système (S2) { 2x – y = 2;6x + 5y = –6
det(S2) = 2×5 – 6×(–1) = 10 + 6 = 16
0 donc (S2) admet une solution unique.
Déterminons cette solution en exprimant y en fonction de x dans la première équation et en substituant la
valeur obtenue dans la deuxième équation.
(S2)
{ y = 2x – 2;6x + 5(2x – 2) = –6
{ y = 2x – 2;16x – 10 = –6
{ y = 2x – 2;16x = 4
Error!
Error!
Error!
.
Error!
.
Voir Module partie 2.
b) Cas où
0'' baab
On est donc dans le cas où le système admet soit aucune solution : c’est le cas ou les droites sont
strictement parallèles, soit une infinité de solution : c’est le cas ou les droites sont confondues.
Pour distinguer ces deux cas il suffit de déterminer si les droites sont strictement parallèles ou
confondues.
 6
6
1
/
6
100%