Cours 3: Programmation linéaire

1-1
Cours 3: Programmation lin´eaire
•Position du probl`eme
•Dualit´e.
•D´eg´en´erescence et terminaison de l’algorithme
•Algorithme du simplexe g´en´erique
Gilles Schaeffer INF-550-3: Programmation lin´eaire

2-1
Un probl`eme de programmation lin´eaire
Donn´ee: Une matrice r´eelle A= (ai,j )de taille m×n,
un vecteur b= (b1,...,bm)de taille m,
un vecteur c= (c1,...,cn)de taille n.
Probl`eme: Trouver un point x= (x1,...,xn)qui
•satisfait les mcontraintes ai,1x1+. . . +ai,nxn≤bi,
•et maximise le produit c·x=c1x1+. . . +cnxn.
Reformulation matricielle: on cherche max(c·x|Ax ≤b).
Gilles Schaeffer INF-550-3: Programmation lin´eaire
Remarque: Les ai,j ,biet cipeuvent ˆetre n´egatifs, on peut donc
mod´eliser des contraintes ≥ou =et chercher min au lieu de max.

3-1
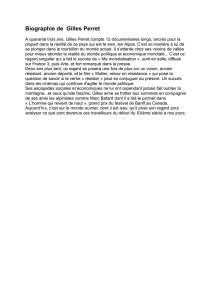
Un exemple bateau: le fleuriste
Donn´ee. En stock: 50 lys, 80 roses, 80 jonquilles.
Composition des bouquets au catalogue:
•10 lys, 10 roses, 20 jonquilles: 4 euros
•10 lys, 20 roses, 10 jonquilles: 5 euros
Probl`eme Quels bouquets pr´eparer si on est assur´e de tout vendre ?
xbouquets
ybouquets
Contraintes: sur les lys: 10x+ 10y≤50
sur les roses: 10x+ 20y≤80
sur les jonquilles: 20x+ 10y≤80
Fonction ´economique `a maximiser: max(4x+ 5y).
x≥0y≥0x
y
011234
0
1
2
3
4
16
22
23
20
c
Lorsqu’on a les contraintes xi≥0on peut toujours penser en termes
´economiques: produits finis, mati`eres premi`eres, b´en´efice.
Gilles Schaeffer INF-550-3: Programmation lin´eaire

4-1
Interpr´etation g´eom´etrique
Donn´ee: Une matrice r´eelle A= (ai,j )de taille m×n,
un vecteur b= (b1,...,bm)de taille m,
un vecteur c= (c1,...,cn)de taille n.
Chaque ´equation ai,1x1+. . . +ai,nxn≤bicoupe l’espace en 2,
le long d’un l’hyperplan normal au vecteur Li= (ai,1,...,ai,n).
L’ensemble des xsatisfaisant Ax ≤b
forme un polyh`edre convexe P
Gilles Schaeffer INF-550-3: Programmation lin´eaire

4-2
Interpr´etation g´eom´etrique
Donn´ee: Une matrice r´eelle A= (ai,j )de taille m×n,
un vecteur b= (b1,...,bm)de taille m,
un vecteur c= (c1,...,cn)de taille n.
Chaque ´equation ai,1x1+. . . +ai,nxn≤bicoupe l’espace en 2,
le long d’un l’hyperplan normal au vecteur Li= (ai,1,...,ai,n).
L’ensemble des xsatisfaisant Ax ≤b
forme un polyh`edre convexe P
´eventuellement vide
Gilles Schaeffer INF-550-3: Programmation lin´eaire
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%