géométrie euclidienne - MPSI-1

GÉOMÉTRIE EUCLIDIENNE
MPSI 1–Lycée Thiers
Année 2008-2009
Table des matières
A Produit scalaire 1
A.1 Définitions et exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
A.1.1 Produit scalaire : définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
A.1.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
A.2 Inégalité de Cauchy-Schwarz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
A.3 Norme euclidienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
A.3.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
A.3.2 Distance euclidienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
A.3.3 Vecteurs unitaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
A.3.4 Relations entre produit scalaire et norme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
A.4 Orthogonalité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
A.4.1 Vecteurs orthogonaux, familles orthogonales, orthonormales . . . . . . . . . . . . . . . . . . 6
A.4.2 Sous-espaces vectoriels et orthogonalité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
B Espaces vectoriels euclidiens 7
B.1 Définition et exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
B.2 Bases orthonormales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
B.2.1 De l’intéret de travailler dans une base orthonormale . . . . . . . . . . . . . . . . . . . . . . 8
B.2.2 Procédé d’orthogonalisation de Schmidt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
B.3 Sous-espaces d’un espace euclidien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
B.3.1 Supplémentaire orthogonal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
B.3.2 Hyperplan, normale à un hyperplan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
B.4 Formes linéaires sur un espace euclidien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
B.5 Projecteurs orthogonaux, distance à un sev . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
B.5.1 Projecteurs orthogonaux, définition et caractérisation . . . . . . . . . . . . . . . . . . . . . . 11
B.5.2 Distance d’un point à un sous-espace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
B.5.3 Cas particulier : distance d’un point à un hyperplan . . . . . . . . . . . . . . . . . . . . . . . 12
B.6 Symétries orthogonales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
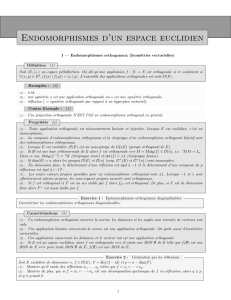
C Automorphismes orthogonaux, matrices orthogonales 14
C.1 Automorphismes orthogonaux, groupe orthogonal . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
C.1.1 Définition et premières propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
C.1.2 Caractérisation : lien avec les bases orthonormales . . . . . . . . . . . . . . . . . . . . . . . . 14
C.1.3 Le groupe orthogonal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
C.1.4 Matrice d’un automorphisme orthogonal dans une base orthonormale, déterminant d’un
automorphisme orthogonal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
C.1.5 Groupe spécial orthogonal, rotations vectorielles . . . . . . . . . . . . . . . . . . . . . . . . . 16
C.1.6 Où l’on reparle des symétries orthogonales et des réflexions . . . . . . . . . . . . . . . . . . 17
C.2 Matrices orthogonales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
C.2.1 Définition, caractérisations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
C.2.2 Matrices orthogonales et automorphismes orthogonaux . . . . . . . . . . . . . . . . . . . . 19
C.2.3 Matrice orthogonale et changement de bases orthonormales . . . . . . . . . . . . . . . . . . 19
C.3 Produit mixte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
D Angle orienté de deux vecteurs non nuls en dimension 2 20

Mathématiques
chapitre : géométrie euclidienne
page
2
E Produit mixte en dimension 221
E.1 Expression analytique dans une bond . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
E.2 Expression à l’aide de l’angle orienté . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
E.3 Interprétation géométrique du produit mixte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
F Petites choses particulières à l’espace euclidien orienté de dimension 322
F.1 Produit vectoriel en dimension 3...................................... 22
F.1.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
F.1.2 Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
F.2 Angle non orienté entre deux vecteurs non nuls de l’espace . . . . . . . . . . . . . . . . . . . . . . . 23
F.3 Interprétation géométrique du produit mixte en dimension 3. . . . . . . . . . . . . . . . . . . . . . 24
G Les automorphismes orthogonaux du plan vectoriel euclidien 25
G.1 Description des matrices orthogonales 2×2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
G.1.1 Description du groupe spécial orthogonal SO (2) . . . . . . . . . . . . . . . . . . . . . . . . 25
G.1.2 Description de O(2) \SO (2) .................................... 26
G.2 Plan large sur les automorphismes orthogonaux du plan . . . . . . . . . . . . . . . . . . . . . . . . 26
G.2.1 Description générale des automorphismes orthogonaux du plan . . . . . . . . . . . . . . . 26
G.3 Les rotations (vectorielles) du plan vues de plus près lorsque le plan est orienté : angle d’une rotation 26
G.3.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
G.3.2 Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
G.3.3 Décomposition en produit (composée) de réflexions . . . . . . . . . . . . . . . . . . . . . . . 27
H Les automorphismes orthogonaux en dimension 328
H.1 Les réflexions de l’espace (un mot) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
H.2 Les rotations vectorielles de l’espace (SO (E3)) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
H.2.1 Petit travail préliminaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
H.2.2 Axe et angle d’une rotation de l’espace orienté . . . . . . . . . . . . . . . . . . . . . . . . . . 29
H.2.3 Décomposition d’une rotation en produit (composée) de deux réflexions . . . . . . . . . . . 31
H.3 Plan large sur les automorphismes orthogonaux de l’espace . . . . . . . . . . . . . . . . . . . . . . 31
H.3.1 Description générale des automorphismes orthogonaux de l’espace . . . . . . . . . . . . . . 32
H.3.2 Décomposition en produit (composée) de réflexions . . . . . . . . . . . . . . . . . . . . . . . 32
H.3.3 Annexe : comment reconnaître une isométrie vectorielle donné par sa matrice dans une
b.o.n.? un plan d’attaque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
I Exos en vrac 35
Dans tout le chapitre, Edésigne un espace vectoriel sur R. Au paragraphe I, il est de dimension quelconque,
mais pour ce qui concerne les espaces euclidiens, aux paragraphes II, III et IV, il est de dimension finie.
Nous nous intéressons donc ici à des R-espaces vectoriels (attention, ces notions ne peuvent avoir de sens que sur
un R-ev -vous verrez l’an prochain une notion analogue pour les C-ev-) qui possèdent en plus ce qu’on nomme
un produit scalaire (une structure de plus mais attention ce n’est pas une loi de composition interne : à deux
vecteurs on va associer un réel, son produit scalaire, qui a de bonnes propriétés ; notion développée au I) : c’est
le cas de R, de R2et de R3que nous connaissons bien. Nous savons l’utilité du produit de scalaire en géométrie,
l’intérêt de la norme, des distances, de l’orthogonalité, des isométries, ... ; ces notions vont maintenant apparaître
dans un cadre plus général et nous allons alors parler d’espaces vectoriels euclidiens et des automorphismes
orthogonaux, nom général de ce que l’on connait sous le nom d’isométrie vectorielle . Nous nous attacherons en
fin de chapitre plus particulièrement à la compréhension des dimensions 2et 3; nous y reviendrons d’ailleurs
dans un autre chapitre après l’étude des espaces affines pour faire de la géométrie affine euclidienne.
A Produit scalaire
A.1 Définitions et exemples
A.1.1 Produit scalaire : définition

Mathématiques
chapitre : géométrie euclidienne
page
3
Définition 1 Applications bilinéaires symétriques positives, définies posi-
tives, produit scalaire.
1. Une forme bilinéaire symétrique ϕ:E2→Rest dite
(a) positive lorsque : ∀x∈E,ϕ (x,x)≥0,
(b) définie positive lorsque, en plus d’être positive, elle vérifie : ∀x∈
E, (ϕ(x,x) = 0 ⇒x= 0E).
2. Par définition, un produit scalaire sur Eest une forme bilinéaire symé-
trique définie positive sur E.
Remarque 1
0) On rappelle que ϕ:E2→Rest une forme bilinéaire symétrique lorsque (def) :
– Bilinéarité :
– pour tout x∈E, l’application partielle ϕ(x,.) : E→R
y7→ ϕ(x,y)
est linéaire,
– pour tout y∈E, l’application partielle ϕ(.,y) : E→R
x7→ ϕ(x,y)
est linéaire.
– Symétrie : ∀(x,y)∈E2,ϕ (y,x) = ϕ(x,y).
1) Le produit scalaire sur les vecteurs plan vérifie bien les quatre points : forme 1) bilinéaire, 2) symétrique,
3)positive, 4) définie positive.
2) (Petites propriétés). Si ϕest un produit scalaire sur Ealors :
– Pour tout x∈E,ϕ(x,0E) = ϕ(0E,x) = 0. En particulier ϕ(0E,0E) = 0.
– Donc : ∀x∈E, (ϕ(x,x) = 0 ⇒x= 0) s’écrit aussi : ∀x∈E, (ϕ(x,x) = 0 ⇔x= 0E)mais dans la pratique
on ne vérifie qu’un sens.
– On a, à l’aide de 1)a)etb) en : ∀x∈E, (x6= 0 ⇒ϕ(x,x)>0).
– (En particulier si E6={0}alors ϕ6= 0.
– On a, pour x∈E:(∀y∈E,ϕ (x,y) = 0) ⇒x= 0E
– Pour tout (x,y)∈E2,
1. ϕ(x+y,x +y) = ϕ(x,x) + 2ϕ(x,y) + ϕ(y,y)
2. ϕ(x−y,x −y) = ϕ(x,x)−2ϕ(x,y) + ϕ(y,y)
3. ϕ(λx +µy,λx +µy) = λ2ϕ(x,x) + 2λµϕ (x,y) + µ2ϕ(y,y)
4. ϕ(x+y,x −y) = ϕ(x,x)−ϕ(y,y)
3) ϕest une forme bilinéaire positive ne signifie pas qu’elle est à valeurs positives, c’est sa restriction à la dia-
gonale qui l’est : d’ailleurs si elle est non nulle, elle prend nécessairement des valeurs strictement positives et
strictement négatives. En effet, s’il existe x0,y0∈Etel que ϕ(x0,y0)6= 0 alors ϕ(x0,y0)ϕ(−x0,y0)<0.
4) Un produit scalaire sur Epeut se noter de moult façons. Voici les plus courantes :
–(x,y)7→ (x|y)
–(x,y)7→ hx|yi
–(x,y)7→ hx;yi
–(−→
x ,−→
y)7→ −→
x .−→
y(notation géométrique)
5) Un R-ev muni d’un produit scalaire est appelé espace préhilbertien réel, mais on dira souvent ici espace muni
d’un produit scalaire.

Mathématiques
chapitre : géométrie euclidienne
page
4
A.1.2 Exemples
Les exemples démontrés ici sont à retenir et peuvent directement être utilisés dans la pratique (sauf si on vous
demande de le redémontrer).
1. Le produit scalaire canonique de R2.
2. Qui se transfère en un produit scalaire de C.
3. Le produit scalaire canonique de R3.
4. Le produit scalaire canonique de Rn.
5. Un produit scalaire sur C0([a;b]) où a < b :(f,g)7→ Rb
af(x)g(x)dx.
6. Un produit scalaire sur C2π(R)espace des fonctions continues 2π-périodiques sur R:
(f,g)7→ 1
2πR2π
0f(x)g(x)dx.
7. Un produit scalaire (c’est en fait le produit scalaire canonique) sur Mn,p (R):(A,B)7→ tr (tAB).
Dans toute la suite on se donne Emuni d’un produit scalaire, noté (.|.).
A.2 Inégalité de Cauchy-Schwarz
– Dans le plan ou dans l’espace : |u.v|=|kukkvkcos u,v| ≤ kukkvk, c’est-à-dire |u.v| ≤ √u.u√v.v ou encore
u.v2≤u.uv.v. Cette inégalité est très importante, elle relie ps et norme. On aimerait bien la généraliser et
savoir si elle dépend de l’expresion particulière ici avec le cosinus ou si elle est intrinsèque au ps. En fait,
cette inégalité est générale :
Proposition 1 Inégalité de Cauchy-Schwarz et cas d’égalité.
1. On a l’inégalité (de Cauchy-Schwarz), valable pour tout (x,y)∈E2:
(x|y)2≤(x|x) (y|y)
³⇔ |(x|y)| ≤ p(x|x)p(y|y)´
2. De plus, l’égalité a lieu ((x|y)2= (x|x) (y|y))si et seulement si xet y
sont liés.
Exemples 1 1. – CS pour le produit scalaire canonique sur Rn. Pour tout (x1,...,xn),(y1,...,yn)∈Rn
Ãn
X
i=1
xiyi!2
≤
n
X
i=1
x2
i.
n
X
i=1
y2
ii.e. (x1y1+... +xnyn)2≤¡x2
1+... +x2
n¢¡y2
1+... +y2
n¢
– Cela s’écrit pour n= 2 :
(x1y1+x2y2)2≤¡x2
1+x2
2¢¡y2
1+y2
2¢
– Cela s’écrit pour n= 1 :
(x1y1)2≤x2
1y2
1(=!! pas très nouveau)
2. Exemple fondamental à retenir aussi pour l’analyse. CS pour le ps sur C([a,b],R)vu plus haut.
– Pour tout (f,g)∈(C([a,b],R))2:
³Rb
af(x)g(x)dx´2≤Rb
af(x)2dx Rb
ag(x)2dx
⇔¯¯¯Rb
af(x)g(x)dx¯¯¯≤qRb
af(x)2dxqRb
ag(x)2dx
– De plus (cas d’égalité), pour tout (f,g)∈(C([a,b],R))2,³Rb
af(x)g(x)dx´2=Rb
af(x)2dx Rb
ag(x)2dx
(¯¯¯Rb
af(x)g(x)dx¯¯¯=qRb
af(x)2dxqRb
ag(x)2dx)ssi il existe (α,β)∈R2\{(0,0)}tel que αf +βg = 0
i.e. ssi
g= 0
ou
∃λ∈R,f =λg
.

Mathématiques
chapitre : géométrie euclidienne
page
5
3. Soit f: [0; 1] →Rcontinue telle que ³R[0;1] f´2=R[0;1] f2. Montrer que fest constante.
4. Soit nun entier non nul, x1, . . . ,xn∈∗
+tels que Pn
i=1 xi= 1.
Montrer que
n
X
i=1
1
xi≥n2, et étudier le cas d’égalité.
A.3 Norme euclidienne
A.3.1 Définition
– Nous nous intéressons maintenant à l’application x7→ p(x|x)qui est bien définie sur Ecar pour tout
x∈E, (x|x)≥0(produit scalaire fbs positive). Cette application est à valeurs positives et on a :
1. ∀x∈E, ³p(x|x) = 0 ⇒x= 0´(produit scalaire fbs définie)
2. ∀x∈E,p(λx |λx) = |λ|p(x|x)(bilinéarité du produit scalaire)
3. ∀(x,y)∈E2,p(x+y|x+y)≤p(x|x) + p(y|y)(conséquence de C.S.)
– Ces propriétés sont caractéristiques de ce qu’on appelle une norme sur un R-espace vectoriel (c’est par
exemple le cas de la valeur absolue sur R, de la norme euclidienne sur R2ou du module sur C, sur R3).
Définition 2 Norme euclidienne.
L’application E→R
x7→ p(x|x)
est appelée norme associée au produit scalaire
ou norme euclidienne. On note kxk=p(x|x).
Exemples 2 1. Dans R:
2. Dans C=R2:
3. Dans R3:
4. Dans Rn:
Proposition 2 La norme euclidienne est une norme sur Eau sens où c’est une
application de Edans Rqui vérifie les quatre propriétés suivants :
1. ∀x∈E, kxk ≥ 0.
2. ∀x∈E, (kxk= 0 ⇔x= 0).
3. ∀x∈E, kλxk=|λ|kxk.
4. Inégalité triangulaire : ∀(x,y)∈E2,kx+yk ≤ kxk+kyk.
Preuve. Faite plus haut.
Remarque 2
1) Inégalité triangulaire généralisée :∀(x,y)∈E2,|kxk − kyk| ≤ kx+yk ≤ kxk+kyk. Preuve tranquileuue .
2) Réécriture de C.S. avec la norme : |(x|y)| ≤ kxkkyk.
3) Étude des cas d’égalité dans l’inégalité triangulaire : kx+yk=kxk+kykssi... ssi x= 0 ou il existe α≥0tq
y=αx (xet ysont colinéaires et ”de même sens”)... rien d’étonnant.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
1
/
39
100%