Chapitre 3

47
CHAPITRE 3
OSCILLATEUR SIMPLE GENERALISE
3.1 INTRODUCTION
L'étude de l'oscillateur simple à 1 degré de liberté ne se restreint pas à l'étude d'un système
masse-ressort-amortisseur tel qu'il a été décrit au chapitre 2. On a déjà rencontré un exemple
d'assemblage complexe de corps rigides dont les conditions aux limites étaient telles que les
mouvements possibles de l'assemblage pouvaient être décrits par l'amplitude du déplacement
en un point du système (chapitre 2.3.4). On a montré que moyennant l'introduction de
grandeurs généralisées (masse m*, raideur k*, amortisseur c* et chargement p*), l'équation
différentielle régissant l'équilibre dynamique du système se ramenait à celle de l'oscillateur à
1 degré de liberté. Ce concept peut être généralisé à l'étude de systèmes possédant une
flexibilité distribuée sur l'ensemble de la structure, comme par exemple une poutre en
flexion. En toute théorie, la poutre possède un nombre infini de degrés de liberté (voir
chapitre 1), cependant en admettant que la déformée de la poutre ne peut prendre qu'une
forme unique, il est possible de ramener l'étude de cette structure à celle d'un oscillateur à 1
degré de liberté.
Cette méthode, alliée à un choix pertinent de la forme pré-supposée de la déformée, se révèle
féconde pour l'obtention de solutions approchées de la réponse vibratoire. La méthode sera
illustrée sur l'exemple simple d'une poutre console (figure 3.1), mais est d'application plus
générale.
3.2 EQUATION D'EQUILIBRE DYNAMIQUE
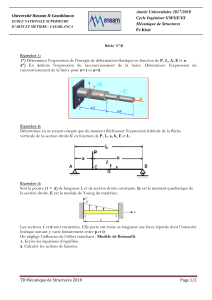
La poutre console de la figure 3.1 est caractérisée par une rigidité en flexion EI(x) variable
sur sa hauteur, et une masse représentée par une variation
()mx
de la masse linéique.
Ce système possède une infinité de degrés de liberté représentés par le déplacement
horizontal et la rotation de tout point M de la fibre neutre. Pour ramener ce système à un
oscillateur à 1 degré de liberté, il est nécessaire de supposer que la déformée de la poutre
s'exprime à l'aide d'une fonction unique ψ(x) et que l'amplitude du déplacement d'un point
quelconque de la poutre s'exprime par :
(3.1)
( ,) ( ) ()uxt x zt= ψ

48
L
L
x
x
L
L
x
x
m(x)
Z(t)
u(x,t)
EI(x)
Figure 3.1 : Poutre Console
où z(t) représente la variation temporelle du déplacement. z(t) est appelée coordonnée
généralisée. Typiquement z(t) est choisi comme étant le déplacement d'un point particulier
de la poutre, par exemple son extrémité supérieure.
L'équation différentielle régissant l'équilibre dynamique de ce système peut être obtenue à
partir du principe des puissances virtuelles.
Soit p(x,t) la distribution des efforts extérieurs appliqués le long de la poutre; pour toute
vitesse virtuelle,
ˆ
U
, la puissance des efforts extérieurs est donnée par :
(3.2)
0
ˆˆ
( ) (,)
L
eU p x t U dx=∫
P
Les efforts intérieurs sont représentés par le moment de flexion M(x,t) dans toute section de
la poutre; la puissance des efforts intérieurs associée à la vitesse de rotation
ˆ
ℜ
est donnée
par :
(3.3)
2
2
00
ˆ
ˆˆ
( ) (,) ()
∂ℜ
ℜ =− ℜ=− ∂
∫∫
LL
i
ud
M x t d EI x dx
x dx
P
La puissance des quantités d'accélérations a pour expression :
(3.4)
0
ˆˆ
( ) () (,)
L
U m x u x t U dx=∫
A
Tenant compte de la relation (3.1), il vient :
(3.5)
2
2
(,) ()() , "()()
u
uxt x zt x zt
x
∂
=ψ=ψ
∂
et les vitesses virtuelles û et
ˆ
ℜ
s'expriment par :
(3.6)
ˆˆ ˆ
ˆ
() , ()U xZ xZ
′
=ψ ℜ=ψ

49
Reportant les expressions (3.5) et (3.6) dans les relations (3.2) à (3.4) :
(3.7a)
0
ˆ ˆˆ
( ) (,) ()
L
eU p x t x Z dx p Z
∗
= ψ=
∫
P
(3.7b)
[ ]
2
0
ˆ ˆˆ
( ) ( ) "( ) () ()
L
iU EI x x z t Z dx k z t Z
∗
=−ψ =−
∫
P
(3.7c)
[ ]
2
0
ˆ ˆˆ
( ) ( ) ( ) () ()
L
U mx x zt Zdx m zt Z
∗
=ψ=
∫
A
L'expression du principe des puissances virtuelles
(3.8)
ˆˆˆ
() () ()
ie
UUU+=PP A
conduit à l'équation :
(3.9)
ˆ
() () () 0m zt k zt p t Z
∗∗∗
+− =
valable pour toute vitesse virtuelle
Z
ˆ
. Il s'ensuit que :
(3.10)
() () ()m zt k zt p t
∗∗ ∗
+=
dans laquelle on reconnaît l'équation différentielle de l'oscillateur simple à 1 degré de liberté.
La pulsation propre de cet oscillateur est donnée par :
(3.11)
*m*k
=ω
Application :
Considérons la poutre de la figure 3.1 avec des propriétés constantes sur la hauteur
(3.12)
() , ()EI x EI m x m= =
et pour laquelle l'excitation s'exprime par :
(3.13)
(,) ()pxt p t= ζ
Les conditions aux limites sont telles que la poutre est encastrée à sa base. Ces conditions
s'expriment par :
- déplacement nul à la base ψ(0) = 0
- rotation nulle à la base ψ'(0) = 0

50
A ce stade, il est possible de choisir toute fonction ψ(x) vérifiant ces conditions aux limites.
En choisissant par exemple :
(3.14)
( ) 1 cos( )
2
x
xL
π
ψ=−
on vérifiera aisément en utilisant les définitions de p*, k*, m* données par les relations (3.7)
que l'équation d'équilibre s'écrit :
(3.15)
4
3
0.227 ( ) ( ) 0.363 ( )
32
EI
mLzt zt Lp t
L
π
+=ζ
De l'équation précédente, on déduit immédiatement que la pulsation propre de l'oscillateur
est donnée par :
(3.16)
2
EI
Lm
λ
ω=
avec
4
4
1.91
32 0.228
π
λ= =
⋅
Il convient de réaliser que la valeur de la pulsation propre calculée par (3.16) dépend
totalement de la forme de la déformée ψ(x). Si un autre choix, respectant les conditions aux
limites, était fait, une valeur différente serait obtenue. Par exemple en choisissant pour ψ(x)
la déformée statique sous une charge unité appliquée au sommet :
(3.17)
23
23
31
() 22
xx
xLL
ψ= −
on vérifiera que la valeur de λ vaut :
λ = 1.89
La fréquence propre obtenue avec cette déformée est plus faible. En réalité, la valeur exacte
de λ est (chapitre 7) :
λ = 1.875
3.3 METHODE DE RAYLEIGH
L'introduction de coordonnées généralisées a permis de réduire un système à un nombre
infini de degrés de liberté à un oscillateur simple pour lequel la pulsation propre est calculée
par l'équation (3.11).

51
Ce résultat pour la pulsation propre peut être obtenu de façon équivalente par des
considérations énergétiques. Elle est connue sous le nom de méthode de Rayleigh.
Pour un système conservatif isolé, la somme de l'énergie potentielle V et de l'énergie
cinétique T est constante.
Démonstration :
Les équations de Lagrange d’un système conservatif s’écrivent
0
∂∂∂
−+=
∂∂∂
iii
dT T V
dt q q q
soit encore
0
∂∂ ∂
−+=
∂∂ ∂
i ii
ii i
dT T V
q qq
dt q q q
Tenant compte de
( ) ( ) ( )
1
,,
2
= = =
i i i ij k i j
V V q T T q q m q qq
il vient compte tenu de la symétrie de la matrice masse
,
∂ ∂∂ ∂
= =+= +
∂ ∂∂ ∂
i iiijjii
i ii i
dV V dT T T T
q qqmqqq
dt q dt q q q
En reportant ces expressions dans les équations de Lagrange et en tenant compte de la relation
( )
( )
( )
2
∂= = −
∂
i i ij k j ij k j i
i
d T d dT
q q mqq mqqq
dt q dt dt
il vient
( )
)0
+
+ = = +=
dT V
dT dV soit T V cst
dt dt dt
Lorsque l'énergie potentielle est maximale, l'énergie cinétique est nulle. De même, lorsque
l'énergie cinétique est maximale, l'énergie potentielle est nulle. La conservation de l'énergie
totale implique donc :
(3.18)
max max
VT=
Démonstration :
22
11
,,
22
= = +=
V k x T m x V T cste
a) énergie potentielle maximale ⇔
0 () 0 0 0
∂= ⇒ = ⇒= ⇒ =
∂
Vkx x x T
t
b) énergie cinétique maximale
0 () 0 0 0
∂∂
=−=⇒ =⇒ =⇒ =
∂∂
TV kx x kx V
tt
En vibration libre, le déplacement u(x,t) est donné :
 6
7
8
6
7
8
1
/
8
100%