L.M ANAGUE TABEJIEU, PhD MECANIQUE DES MILIEUX CONTINUS Page 1 of 17
Chapitre III : Etat de Déformations dans les milieux continus
La notion de déformation d'un système matériel nait de la comparaison entre une configuration dite initiale
0
D
et une configuration qualifiée de finale
t
D
. Lorsqu'un domaine matériel
D
évolue entre deux instants
12
ettt
, il
se déforme en général, i.e. les distances entre deux points et les angles des tangentes à deux courbes en un même
point ne se conservent pas entre les instants
12
ettt
. On s'intéresse dans ce chapitre à la comparaison entre ces
deux configurations sans considérer le mouvement qui permet de passer de l'une à l'autre. Une fois choisie la
configuration initiale comme configuration de référence, la description Lagrangienne apparait bien adaptée à
l'étude des déformations.
III-1- Gradient de la Transformation
Soit un référentiel
dans lequel on a choisi un repère R constitué d’une origine O et de la base cartésienne
orthonormée
( )
1 2 3
,,B E E E=
. Soit
D
une partie quelconque d’un système matériel (S). On désigne par
0
D
, la
configuration de
D
à l’instant initial et par
t
D
sa configuration à l’instant t.
III-1-1- Définition du tenseur Gradient de la transformation
Considérons deux points matériels M et N occupant à l’instant initial les positions
00
etMN
. Soit
et
tt
MN
les
positions respectives de ces deux points à l’instant t. On pose :
( ) ( )
00
, , ,
p p p p t p p t p p
OM X X E ON Y Y E OM X x x E ON Y y y E
= = = = = = = = = =
(3.1)
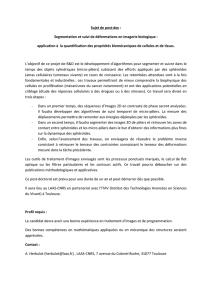
Figure 3.1 : Configurations initiale et actuelle d’un domaine matériel
D
L’un des objectifs que nous nous sommes fixés est de savoir si la distance entre les deux points M et N reste
constante ou non, quand on passe de la configuration initiale à la configuration à l’instant t. A cette fin
commençons par exprimer le vecteur
tt
MN
en fonction du vecteur
00
MN
.
On a :
( ) ( )
,,
t t t t
M N ON OM y x Y t X t
= − = − = −
(3.2)
En projectant sur la base B, on peut écrire :
( ) ( )
1 2 3 1 2 3
, , , , , , , 1,2,3
i i i i
y x Y Y Y t X X X t i
− = − =
(3.3)

L.M ANAGUE TABEJIEU, PhD MECANIQUE DES MILIEUX CONTINUS Page 2 of 17
Il vient alors en effectuant un développement limité au voisinage du point
( )
0 1 2 3
,,M X X X
à t fixé :
( )
( )
( ) ( ) ( ) ( )
1 2 3
1/2
2 2 2
1 1 2 2 3 3 1 1 2 2 3 3
, , ,
, , , , 1,2,3
i
i i p p
p
i
y x X X X t Y X
X
Y X Y X Y X Y X Y X Y X t i
− = − +
− + − + − − − − =
(3.4)
Où
0
i
→
si
( )
00
pour 1,2,3
ii
Y X i N M→ = →
. Sous forme vectorielle, la relation (3.4) peut s’écrire :
( )( ) ( )
,,y x F X t Y X Y X Y X t
− = − + − −
(3.5)
Où
0 si YX
→→
. Le tenseur
( ) ( )
( )
( )
( )
, , ,F X t Grad X t Grad x X t
==
ainsi introduit (qui dépend de
0
M
et t) est appelé tenseur Gradient de la transformation et a pour composantes dans la base B, les scalaires :
ou simplement
ii
ij ij
jj
x
FF
XX
==
(3.6)
Le déterminant de la matrice du tenseur Gradient de la transformation notée F (indépendant de la base B choisie)
n’est autre que la dilatation volumique
( )
,J X t
:
( )
( )
1 2 3
1 2 3
( , , )
, det 0
( , , )
D x x x
J X t F J
D X X X
= =
(3.7)
III-1-2- Tenseur inverse du tenseur Gradient de la Transformation
Comme
( )
,J X t
est non nul en tout point
0
D
, le tenseur
F
est inversible, et son inverse est noté
1
F−
. Si on note
1
GF
−
=
, les composantes de
G
, relative à la base B sont les scalaires :
( )
1, 1,2,3
i
ij ij j
X
G F i j
x
−
= = =
(3.8)
III-1-3-Transformation homogène
Un domaine matériel
D
subit une transformation homogène entre les configurations
0
D
et
t
D
si
F
ne dépend
pas du point matériel
0
M
. on a :
( )
( ) ( )
,x X t F t X B t
= = +
(3.9)
Pour tout
0
M
de
0
D
. On peut aussi écrire :
( )
( )
( )
00t t t t
M N ON OM y x F t Y X F t M N= − = − = − =
(3.10)
III-1-4-Interpretation mécanique

L.M ANAGUE TABEJIEU, PhD MECANIQUE DES MILIEUX CONTINUS Page 3 of 17
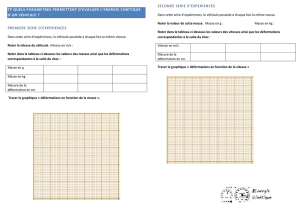
Considérons le segment
00
MN
et supposons
0
N
voisin de
0
M
. Dans la configuration actuelle, ce segment s’est
déformé, par exemple en un arc de courbe
( )
t
c
dit arc transformé de
00
MN
à l’instant t représenté par
tt
MN
.
Nous avons vu que si
0
N
est voisin de
0
M
, on peut approcher le vecteur
tt
MN
par le vecteur
tt
MN
tel que :
( )
0 0 0
,
tt
M N F M t M N
=
(3.11)
appelé vecteur transporté du vecteur
00
MN
à l’instant t. Dans la schématisation de la déformation d’un milieu
continu, on approche le vecteur
tt
MN
par le vecteur
tt
MN
, ce qui a l’avantage de ramener l’étude de
l’accroissement d’une application ici noté
, en général non linéaire à celle d’une application linéaire
F
.
Figure 3.2 : Transformé et transporté d’un vecteur
00
MN
III-1-4- Notation différentielles
La relation
( )
0 0 0 0 0 0,MN FM N M N M N t
=+
(3.12)
est exacte, quel que soit la longueur du vecteur
00
MN
. Toute fois le vecteur
00
FM N
en sera une bonne
approximation du vecteur
MN
que si voisin de. Cet argument de proximité nous incite à écrire :
00 ,M N dX MN dx
==
(3.13)
D’après la relation (3.11), on a :
dx F dX=
(3.14)
Et si nous posons :
MN ON OM y x x= − = − =
, la relation (3.12) s’est :
( )
,x dx dX dX t
= +
(3.15)
avec
( )
,dx F X t dX=
c’est-à-dire
, 1,2,3
i
ip
p
x
dx dX i
X
==
. Les quantités
( )
i
dx
apparaissent bien comme des
différentielles.
Figure 3.3: Transformé et transporté d’un vecteur
dX
(notations différentielles)

L.M ANAGUE TABEJIEU, PhD MECANIQUE DES MILIEUX CONTINUS Page 4 of 17
III-2-Transport d'un vecteur, d'une surface et d’un volume élémentaires
Soient
,
trois vecteurs élémentaires en
0
M
formant une base de
3
E
. Le parallélogramme construit
à partir de
sera appelé surface élémentaire au voisinage de
0
M
, et celui construit à partir de
et
sera appelé volume élémentaire au voisinage de
0
M
. Le vecteur
peut-être considéré
comme un arc élémentaire.
Figure 3.4 : Vecteur, Surface et volume élémentaires
III-2-1-Transport d'un vecteur élémentaire
Nous avons vu qu'un arc de courbe
0
c
passant par
0
M
se transformait au cours du Mouvement en un arc de courbe
c
qu'on pouvait approcher par le transporté
dx F dX=
tangent en
00
àMc
. Introduisons les vecteurs unitaires
et tels que :
et
avec d=
, dl=
. Comme
dx F dX=
, on peut
écrire :
00
tdl F t dl=
(3.16)
Ce qui s’écrit en composantes dans la base B :
00
i
ip
p
x
t dl t dl
X
=
(3.17)
Figure 3.5 : Transport d’un vecteur élémentaire
III-2-2- Transport d’une surface élémentaire
Soient
dx F dX=
et
dx F dX
=
les vecteurs transportés respectivement de
et
. Le parallélogramme

L.M ANAGUE TABEJIEU, PhD MECANIQUE DES MILIEUX CONTINUS Page 5 of 17
dS
construit à partir des vecteurs
est dit surface transportée de
0
dS
. Comme
sont des
approximations des transformés de
dans le mouvement,
dS
est une approximation de la transformée
de
0
dS
dans le mouvement. On a :
=
dA (3.18)
où dA désigne l'aire de
dS
,
étant un vecteur unitaire perpendiculaire à l'aire
dS
. Il vient, en composantes
dans la base B :
dd dd ,
1,2,3i=
(3.19)
où est le symbole d'antisymétrie défini par :
= 0 si deux indices au moins sont égaux,
= 1 si (i,j, k) est une permutation paire de (1, 2, 3)
= -1 si (i,j,k) est une permutation impaire de (1,2,3).
Figure 3.6 : Transport d’une surface élémentaire
On peut faire apparaitre J dans (3.19) en multipliant les deux membres par et en sommant sur l’indice i. il
vient : d = .det d (car .det ) (3.20)
Désignons par le tenseur transposé de . On peut alors écrire :==
et la relation (3.20)
s’écrit :
=J (
d’où
. Les opérations de transposition et
inversion étant commutable, il vient alors :
(3.21)
Soit, en composantes dans une base B :
=J
d (3.22)
Les vecteurs
=
et
=
appelés vecteurs-aire élémentaires. On a donc :
=J
(3.23)
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%