1
020 40 60 80 100 120 140
-0.1 3
-0.0 9
-0.0 5
-0.0 1
0.03
0.07
0.11
0.15
0.19
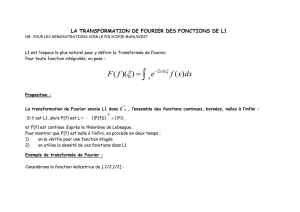
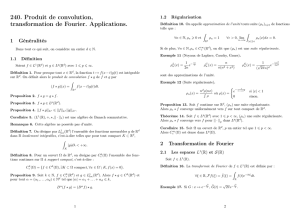
Partie voisée du mot six (au milieu du mot)
020 40 60 80 100 120 140
-0.0 3
-0.0 2
-0.0 1
0.00
0.01
0.02
Partie non-voisée du mot six (aux 3/4 du mot)
Cours - Travaux Dirigés et
Travaux Pratiques de
Traitement du signal
Benoît Decoux
benoit.decoux@wanadoo.fr

2
020 40 60 80 100 120 140
-0.1 3
-0.0 9
-0.0 5
-0.0 1
0.03
0.07
0.11
0.15
0.19
Partie voisée du mot six (au milieu du mot)
020 40 60 80 100 120 140
-0.0 3
-0.0 2
-0.0 1
0.00
0.01
0.02
Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
I) Introduction générale
Plan du cours
Cours – TD
Grandes parties :
Généralités sur les signaux
Analyse fréquentielle des signaux (Séries de Fourier, Transformée de Fourier…)
Filtrage analogique et numérique(Transformée de Laplace…)
Dans chaque partie :
Approfondissements théoriques (T. Laplace, distributions, intégration…)
Cas continu, cas discret
Cas des images
Applications
Exercices
TP
Utilisation de Scilab

3
020 40 60 80 100 120 140
-0.1 3
-0.0 9
-0.0 5
-0.0 1
0.03
0.07
0.11
0.15
0.19
Partie voisée du mot six (au milieu du mot)
020 40 60 80 100 120 140
-0.0 3
-0.0 2
-0.0 1
0.00
0.01
0.02
Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
I) Introduction générale
Modalités de déroulement
Chaque séance : 1h-1h30 cours / 1h30-2h TP
Approche pédagogique : très appliquée voire inductive
Logiciel/langage de programmation utilisé : Scilab
TP par binôme, sur ordinateurs portables personnels
Compte-rendus de TP (1 par séance) :
Contenu :
oréponses aux questions posées
oprogrammes écrits
orésultats de leur test
ointerprétation de ces résultats
Format fichiers : compatible MsWord
Nom fichier : TPn_Nom1Nom2.doc (n numéro du TP)
Possibilité de compléter avant séance suivante ; envoi des compléments à :
Evaluation
QCM de 5 à 10 questions en fin de chaque séance (10 mn) ; questions de cours, TD et TP
Compte-rendus de TP
Examen final

4
020 40 60 80 100 120 140
-0.1 3
-0.0 9
-0.0 5
-0.0 1
0.03
0.07
0.11
0.15
0.19
Partie voisée du mot six (au milieu du mot)
020 40 60 80 100 120 140
-0.0 3
-0.0 2
-0.0 1
0.00
0.01
0.02
Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
I) Introduction générale
Quelques généralités
Qu’est-ce qu’un signal ?
!une grandeur physique variant au cours du temps
!une fonction mathématique (variable : le temps)
mais également…
!une image (variables : les 2 dimensions spatiales)
Qu’est-ce que le traitement du signal ?
!A la fois très théorique et très appliqué
Applications
!téléphonie, communications, audio-visuel, médecine…
Outils
!ordinateur / logiciels-programmation "bas-niveau"
!processeurs spécialisés (DSP)

5
020 40 60 80 100 120 140
-0.1 3
-0.0 9
-0.0 5
-0.0 1
0.03
0.07
0.11
0.15
0.19
Partie voisée du mot six (au milieu du mot)
020 40 60 80 100 120 140
-0.0 3
-0.0 2
-0.0 1
0.00
0.01
0.02
Partie non-voisée du mot six (aux 3/4 du mot)
Traitement du Signal
II) Notions générales
II.1) Rappels
Signal sinusoïdal :
ou
avec :
A : amplitude ; ωpulsation (=2πf ; f=1/T) en rad/s ; φ: phase à l’origine (0<=φ<2π) en rad
Représentations :
temporelle fréquentielle
)tsin(A)t(s
ϕ
+
ω
=
f
0
Spectre d’amplitude
A
ff
0
Spectre de phase
φ
f
T
A
t
s(t)
t
0
=φ/ω
)
2
tsin(A)tcos(A)t(s π
+ϕ+ω=ϕ+ω=
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
1
/
106
100%