Dynamique inverse

Dynamique inverse
CH V

Anthropométrie (Winter, Allard & Blanchi)
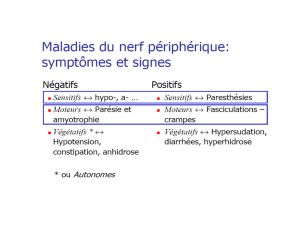
Masses segmentaires
Masses segmentaires
0.0145
0.0465
0.1000
0.4970
0.0810
0.0280
0.0160
0.0060
HAT = 0.678
0.0145
0.0465
0.1000
0.4970
0.0810
0.0280
0.0160
0.0060
HAT = 0.678
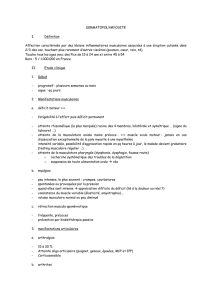
Longueurs segmentaires
Longueurs segmentaires
H
0.936H
0.870H
0.818H
0.630H
0.465H
0.377H
0.129H
0.186H 0.146H 0.108H
0.520H
0.130H
0.520H
0.285H
0.259H
0.039H
Longueur du pied : 0.152HLargeur du pied : 0.055H
Longueurs segmentaires
Longueurs segmentaires
H
0.936H
0.870H
0.818H
0.630H
0.465H
0.377H
0.129H
0.186H 0.146H 0.108H
0.520H
0.130H
0.520H
0.285H
0.259H
0.039H
Longueur du pied : 0.152HLargeur du pied : 0.055H
H
0.936H
0.870H
0.818H
0.630H
0.465H
0.377H
0.129H
0.186H 0.146H 0.108H
0.520H
0.130H
0.520H
0.285H
0.259H
0.039H
Longueur du pied : 0.152HLargeur du pied : 0.055H
Centres de masse
Centres de masse

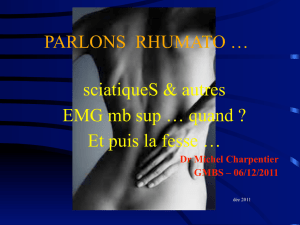
Dynamique inverse :
DI
Cinématique
(déplacements, vitesses,
accélérations
Moment musculaire
résultant
Anthropométrie
(longueur, masses, CdG,
moments d’inertie)
Force articulaire de
compression
Cinétique
(Force et Moment
externes)
Force articulaire de
cisaillement

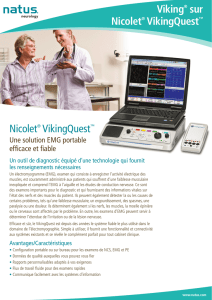
Dynamique inverse :
biceps
M
triceps
M
•Moment musculaire résultant : somme vectorielle des moments
de force développés par chaque muscle agissant autour d’une
articulation.
•Force articulaire de compression :
composante verticale de la force de
réaction articulaire.
•Force articulaire de cisaillement :
composante horizontale de la force de
réaction articulaire.
Comp
F
Res
M
Cis
F

Les étapes de la dynamique inverse
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
1
/
58
100%