EVOLUTIONS des PARAMETRES CINETIQUES et

EVOLUTIONS des PARAMETRES
CINETIQUES et CINEMATIQUES
lors d ’un EXERCICE
de FLEXION-EXTENSION
du MEMBRE INFERIEUR
EVOLUTIONS des PARAMETRES
CINETIQUES et CINEMATIQUES
lors d ’un EXERCICE
de FLEXION-EXTENSION
du MEMBRE INFERIEUR
Sébastien MAITRE
Sébastien MAITRE
UFR STAPS Clermont-Ferrand 11 juin 1999
Laboratoire de la Performance Motrice : Université Blaise-Pascal / E.A. 994
Laboratoire d ’Anatomie : Université d’Auvergne / E.A. 2149
Laboratoire de la Performance Motrice
Laboratoire de la Performance Motrice : Université Blaise
Université Blaise-
-Pascal /
Pascal / E.A. 994
Laboratoire d ’Anatomie : Université d’Auvergne / E.A. 2149

OBJECTIFS de la RECHERCHE
OBJECTIFS de la RECHERCHE
ÉVALUATION des :
VARIATIONS et VITESSES ANGULAIRES
(analyse optoélectronique)
VARIATIONS et VITESSES ANGULAIRES
(analyse optoélectronique)
ACTIVITÉ MUSCULAIRE
(analyse EMG)
ACTIVITÉ MUSCULAIRE
(analyse EMG)
CONTRAINTES sur l ’ARTICULATION LOMBO-SACRÉE
en condition statique
CONTRAINTES sur l ’ARTICULATION LOMBO-SACRÉE
en condition statique

PROTOCOLE EXPERIMENTAL
PROTOCOLE EXPERIMENTAL
Exercice de flexion de jambes (squat) à 90° :
3 répétitions à charge nulle
3 répétitions à 50% du poids de corps
3 répétitions à 75% du poids de corps
10 répétitions à 100% du poids de corps
10 répétitions à 120% du poids de corps
La flexion à 90° est déterminée à l’aide d’un repère tactile
20 sujets hommes :
27.7 ±6.8ans / 176.1 ±5.5cm / 74.9 ±9.8kg

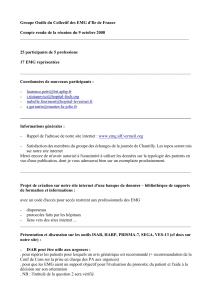
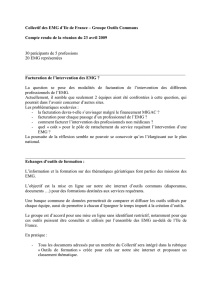
Coordonnées 3D
vitesses et déplacements
angulaires
Caméras
EMG
Plate-forme
de Forces
Recrutement musculaire
Paramètres
cinétiques
DISPOSITIF EXPERIMENTAL
DISPOSITIF EXPERIMENTAL

MATERIEL
MATERIEL
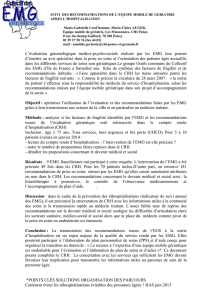
Système d ’analyse 3D optoélectronique (Saga-3) :
marqueurs situés au niveau des repères anatomiques
acromions / T7 / S1 / Crêtes Iliaques / Grands Trochanters
Condyles Fémoraux / Condyles Tibiaux / Malléoles Tibiale &
Fibulaire / Calcaneus / 1er et 5ème Métatarsiens
EMG : électrodes de surfaces
Gluteus Maximus
Vastus Lateralis & Medialis
Gastrocnemius
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%