1 Rappel : Fonctions cosinus et sinus 2 Cercle trigonométrique

Trigonometrie
1 Rappel : Fonctions cosinus et sinus
1.1 Définition
Soit un triangle ABC rectangle en B. On
appelle αl’angle [
BAC.
Le rapport AB
AC ne dépend que de l’angle
αet on a le Cosinus :
Cos(α) = AB
AC
De la même façon on a le Sinus :
Sin(α) = BC
AC A B
C
α
1.2 Valeurs remarquables
On peut déterminer de façon exacte ces rapports pour certains angles particuliers.
α0˚ 30˚ 45˚ 60˚ 90˚
Cos(α) 1 √3
2
√2
2
1
20
Sin(α) 0 1
2
√2
2
√3
21
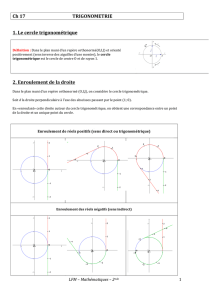
2 Cercle trigonométrique
On appelle cercle trigonométrique un
cercle de rayon 1.
On appelle sens direct, ou sens tri-
gonométrique le sens inverse des aiguilles
d’une montre (indiqué +sur la figure).
Un point Mdu cercle peut être repéré par
l’angle \
IOM =α.
x
y
•I
•
J
•
O
•M
α
+
Notation : Plutôt que la notation \
IOM, on préfère la notation −→
OI ;−−→
OM.
Question : Lesquelles de ces points appartiennent au cercle trigonométrique ?
Page 1/5

Trigonometrie
–A(1,1) –B(3
5,4
5)–C(−√3
2,1
2)–E(√3,−√2)
3 Longueur d’un arc de cercle
Le périmètre du cercle trigonométrique est
P= 2π, ce qui correspond à un tour complet,
soit un angle de 360˚.
L’angle αest une faction d’un tour com-
plet. On aura donc l’arc _
IM en rapport à 2π
égal à celui de αà360˚.
On peut alors compléter le tableau ci-
dessous.
•I
•
J
•
O
•M
α
+
α0˚ 30˚ 45˚ 60˚ 90˚ 120˚ 180˚ 360˚
_
IM 0π
6
π
8
π
3
π
2
2π
3π2π
On constate que _
IM et α(exprimé en degrés) sont proportionnels et que _
IM =π
180 ×α
où αest exprimé en degrés.
Définition 1: On appelle radian l’unité d’angle telle qu’un tour complet repré-
sente un angle de 2πradians. On a la formule :
αradians =π
180αdegrs
En exprimant les angles en radians, la lon-
gueur d’un arc _
IM de cercle de rayon Ret
d’angle αest tout simplement :
_
IM =Rα
L’aire du secteur OIM est AOIM =1
2R2α
R•I
•
O
•
M
α
4 Enroulement de la droite des réels
Une droite des réels est une droite quel-
conque permettant de représenter graphique-
ment l’ensemble des nombres réels. Cette
droite est dotée d’un repère (O;I),Oétant
l’origine et Idonnant le sens et l’échelle.
x
•
I
1
•
O
0
•
M
4,5
Page 2/5

Trigonometrie
Ici, dire que le point Mreprésente la valeur 4,5revient à dire que OM = 4,5, compté
positivement dans le sens de −→
OI.
Enrouler cette droite sur le cercle trigo-
nométrique c’est faire le même travail sur le
cercle trigonométrique : On prend le cercle
trigonométrique, l’échelle est donnée par son
rayon OI, le sens est le sens trigonométrique.
Alors dire que le point Mreprésente 4,5re-
vient à dire que _
IM = 4,5.
•I
•O
•
M
4,5rad
A droite, la représentation d’un tel en-
roulement. M(x)est l’image du réel xsur le
cercle trigonométrique :
_
IM(x) = x.
x
y
I
J
•
O•
D
C
×
×
×
×
×
×
×
×
π
π
2
−π
2
−π
•
•x
•
M(x)
Exercices du Math’x : 15 et 16p156
On voit que M(0) = Iet Mπ
2=J. Mais M(2π) = Iaussi ! En effet, 2πcorrespond à
un tour complet. Après un tour, Mrevient en I. On pourrait dire également que I=M(0) =
M(2π) = M(4π) = M(6π) = ···.
Pour tous x∈Ret k∈Z, on a M(x+ 2kπ) = M(x). Autrement dit,
M(x) = M(x0)⇔x−x0= 2kπ avec k∈Z. En effet, un arc de longueur 2kπ
correspond à exactement ktours complets du cercles
Exemple : Les réels 9π
13 et −17π
13 ont la même image sur le cercle trigonométrique. En
effet, 9π
13 −−17π
13 =26π
13 = 2π.
Exercices du Math’x : 23 p157
Page 3/5

Trigonometrie
5 Cosinus et sinus d’un nombre réel
Définition 2: Dans le repère orthonormal (O;I;J), le point M(x)a pour coor-
données (cos(x) ; sin(x)).
Cette définition est naturelle si on utilise
les radians.
En effet, dans le triangle OMa,OM = 1
est l’hypoténuse et Oa est le coté adjacent de
l’angle α. On a donc cos(α) = Oa
OM =xM.
De même, sin(α) = yM.
Or, dire que Mest l’image du réel x
sur le cercle trigonométrique, c’est dire que
_
IM(x) = x, ou encore que α=x, si αest
exprimé en radians. •
O I
•
J
•
a
•
b
•
•M
α
On donne ci-dessous quelques valeurs remarquables.
α0˚ 30˚ 45˚ 60˚ 90˚
αen rad 0 π
6
π
4
π
3
π
2
cos(α) 1 √3
2
√2
2
1
20
sin(α) 0 1
2
√2
2
√3
21
Remarque : On n’est pas limités à des
angles positifs et aigus ! Avec cette nouvelle
définition, on peut calculer les cosinus et sinus
d’angles négatifs et plus grands qu’un angle
droit.
Ci-contre, exemple d’un angle de 3π
4(soit
135˚) et un autre de −π
6(soit −30˚).
O I
J
√3
2
1
2
√2
2
√2
2
1
2
√3
2
O I
J
√3
2
−1
2
−√2
2
√2
2
3π
4
π
6
On peut utiliser les symétries pour trouver les cosinus et sinus des angles autres que ceux
connus.
Exercices du Math’x : 26 et 29 p157
Page 4/5

Trigonometrie
6 Propriétés des fonctions sinus et cosinus
Propriété 1: Pour tout réel x:
–(cos(x))2+ (sin(x))2= 1. On préfère généralement la notation :
cos2(x) + sin2(x)=1
–−16cos(x)61
–−16sin(x)61
Démonstration :
– Soit xun réel. M(x)est l’image de xsur le cercle trigonométrique et ses coordonnées
sont (cos(x) ; sin(x)). On a OM2= cos2(x) + sin2(x)et comme Mest sur le cercle
trigonométrique, OM = 1.
– Notons X= cos(x)et Y= sin(y).X2+Y2= 1 donc Y2= 1 −X2. Comme X2>0
alors Y261et donc −16Y61. On raisonne de même pour X.
Exemple : Pour x=π
6,cos2(x) + sin2(x) = √3
2!2
+1
22
=3+1
4= 1
Page 5/5
1
/
5
100%