Chapitre 1 : Emergence du chaos

Chapitre 1 :
Emergence du chaos

Objectifs du chapitre
> Introduire la notion de chaos
> Illustrer quelques systèmes chaotiques

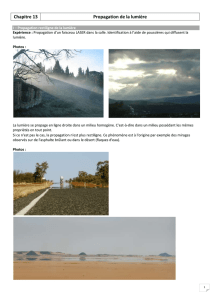
Fin du déterminisme en mécanique classique
• Mécanique Newtonienne : système à N corps
• Problème à deux corps : système Soleil-Terre
lois de Kepler
mi
d2⌃ri
dt2
=⌃
Fi
S
T
T2=42a3
GM
i={1,...,N}
Tous les systèmes physiques (matériels) conduisent le physicien à étudier N
corps en interaction : électrons, ions, molécules, corps célèstes, ...
G=6.674 1011 N(m/kg)2
- déterminisme absolu
- pas de surprise

• Problème des trois corps (Euler, Lagrange, Jacobi, Poincaré)
- Laplace et Lagrange : linéarisation des équations
> recherche de points stables
soleil terre
L1
L2
L3
L4
L5
R
r
> seuls L1, L2 et L3 sont stables

- stabilité céleste : Soleil-Terre-Lune
> problème très difficile même contraint dans un plan !
mi
d2⇧ri
dt2
=
j=i
mimj
⇧rj⇧ri
|⇧rj⇧ri|3
i={1,2,3}
S
T
L
> la perturbation du problème à deux corps par le 3ème ne suffit pas.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%