ANGLES ORIENT´ES - TRIGONOM´ETRIE 1 Angles orient´es

CHAPITRE VII
ANGLES ORIENT ´
ES - TRIGONOM´
ETRIE
1 Angles orient´es
1.1 Rep´erage d’un point sur le cercle trigonom´etrique
+
O I
d
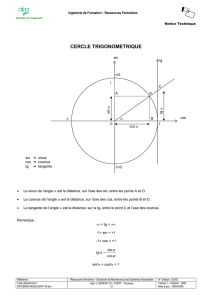
C+Soit Cun cercle trigonom´etrique et dla droite tangente au cercle en I
(appel´ee droite des r´eels).
A tout nombre r´eel x, on fait correspondre un point Munique du cercle
en enroulant la droite dsur le cercle : dans le sens direct si x≥0, dans
le sens indirect si x < 0.xest une mesure en radians de l’arc de cercle
orient´e
⌢
IM d’origine Iet d’extr´emit´e M
1.2 Angle orient´e de deux vecteurs non nuls
+
O
−→
u
−→
v
C−→
v
−→
u
+M
+N
D´efinition 1
Soient
−→
u
et
−→
v
deux vecteurs non-nuls.
Il existe un unique couple de points
(M;N)
du cercle
C
tel que
−−→
OM =−→
u
||−→
u|| et −−→
ON =−→
v
||−→
v|| .
Les points
M
et
N
appartiennent au cercle
C
. Les deux vecteurs
−→
u
et
−→
v
non nuls d´efinissent un angle orient´e
(−→
u;−→
v)
dont un
repr´esentant est l’angle
(−−→
OM;−−→
ON)
.
Une mesure en radians de l’angle orient´e
(−→
u;−→
v)
est une
mesure de l’arc orient´e
⌢
MN
.
On a
(−→
u;−→
v) = (−−→
OM;−−→
ON)
.
Propri´et´e 1
Si
x
est une mesure de l’angle orient´e des vecteurs non nuls
−→
u
et
−→
v
alors l’ensemble de ses mesures
est
(−→
u;−→
v) = x+2kπ
o `u
k∈Z
. On ´ecrit aussi :
(−→
u;−→
v) = x[2π]
qui se lit ”
x
modulo
2π
”.
D´efinition 2
On appelle mesure principale l’unique valeur
x0
, parmi les r´eels
x+2kπ
, appartenant `a l’intervalle
] − π;π]
.
Exemple : Donner les mesures principales des angles suivants : x1=21π
2et x2=5π
3.
1.3 Propri´et´es des angles orient´es
On a donc (−→
u;−→
u) = 0et (−−→
u;−→
u) = (−→
u; −−→
u) = π
Propri´et´e 2
Deux vecteurs non-nuls
−→
u
et
−→
v
sont colin´eaires de mˆeme sens si, et seulement
(−→
u;−→
v) = 0
.
Deux vecteurs non-nuls
−→
u
et
−→
v
sont colin´eaires de sens contraires si, et seulement
(−→
u;−→
v) = π
.
1

Propri´et´e 3
Relation de Chasles
Pour tous vecteurs non nuls
−→
u
,
−→
v
et
−→
w
on a :
(−→
u;−→
v) + (−→
v;−→
w) = (−→
u;−→
w)
Cons´equences :
Pour tous vecteurs non nuls −→
u,−→
von a :
•(−→
v;−→
u) = −(−→
u;−→
v)•(−→
u; −−→
v) = (−→
u;−→
v) + π
•(−→
−u;−→
v) = (−→
u;−→
v) + π•(−→
−u;−→
−v) = (−→
u;−→
v)
2 Trigonom´etrie
2.1 Cosinus et sinus
D´efinition 3
Soit
x
un r´eel quelconque
Il lui correspond un unique point
M
du cercle trigonom´etrique tel que
x
soit une mesure en radians
de
(−−→
OA, −−→
OM)
➤
Le cosinus de
x
, not´e
cos x
, est l’abscisse de
M
dans le rep`ere
(O;−→
i;−→
j)
.
➤
Le sinus de
x
, not´e
sin x
, est l’ordonn´ee de
M
dans le rep`ere
(O;−→
i;−→
j)
.
cosx et sinx sont donc respectivement
l’abscisse et l’ordonn´ee du point Mdans le
rep`ere (O;−→
i;−→
j)
On note : M(cos x;sin x)
M
x
cos x
sin x
0 A
−→
j
−→
i
Propri´et´e 4
♦cos2x+sin2x=1
♦−16cos x61
et
−16sin x61
♦cos(x+2kπ) = cos x
et
sin(x+2kπ) = sin x
pour tout
k∈Z
2.2 Valeurs remarquables
0
π
6
π
4
π
3
π
2
5π
6
3π
4
2π
3
−π
7π
6
5π
4
4π
33π
2
11π
6
7π
4
5π
3
1
2
√2
2
√3
2
0
−1
2
−√2
2
−√3
2
1
2
√2
2
√3
2
−1
2
−√2
2
−√3
2
On obtient le tableau de valeurs suivant :
α 0 π
6
π
4
π
3
π
2π
sin(x)01
2
√2
2
√3
21 0
cos(x)1√3
2
√2
2
1
20−1
2

2.3 Cosinus et sinus d’angles associ´es
Pour tout x∈R,
xcos(−x) =
sin(−x) =
xcos(π−x) =
sin(π−x) =
xcos(π+x) =
sin(π+x) =
x
cos(π
2−x) =
sin(π
2−x) =
cos(π
2+x) =
sin(π
2+x) =
2.4 Fonction sinus et cosinus
2.4.1 P´eriodicit´e
On d´eduit des propri´et´es pr´ec´edentes que les fonctions x7→sin xet x7→cos xsont p´eriodiques de
p´eriode 2π.
2.4.2 Courbes repr´esentatives
Les courbes repr´esentatives des fonctions sinus et cosinus s’appellent des sinuso¨ıdes. Voici en rouge,
la courbe repr´esentative de la fonction sinus, en bleu, celle de la fonction cosinus.
1
−1
π
2π
−π
2
−π
−2π
−2π
2π
2.4.3 D´eriv´ees
Propri´et´e 5
Les fonctions
x7→sin(x)
et
x7→cos(x)
sont d´erivables sur
R
et on a
(sin)′(x) = cos(x)
et
(cos)′(x) = − sin(x).
3

3 Rep´erage polaire
+
+
O−→
ı
−→
θ
r
M
C
D´efinition 4
Tout point
M
du plan distinct de l’origine
O
peut ˆetre rep´er´e par un couple de r´eels
(r;θ)
tels que
OM =r
et
(−→
ı , −−→
OM) = θ
(en radians).
(r;θ)
est un couple de coordonn´ees polaires du point
M
dans le rep`ere
(O, −→
ı)
.
O
est appel´e le pˆole,
r
le rayon polaire et
(O, −→
ı)
l’axe polaire.
Remarques :
Un point M´etant donn´e, le couple (r;θ)n’est pas unique car θest d´efini modulo 2π . En revanche, `a un
couple (r;θ)correspond un unique point M.
Pour l’origine O, on convient que r=0et que θest quelconque.
Propri´et´e 6
Dans un rep`ere orthonorm´e direct
(O;−→
ı;−→
)
, si un point
M
distinct de
O
a pour coordonn´ees
cart´esiennes
(x;y)
et pour coordonn´ees polaires
(r;θ)
, alors :
passage des coordonn´ees cart´esiennes
aux coordonn´ees polaires :
passage des coordonn´ees polaires
aux coordonn´ees cart´esiennes :
r=px2+y2x=rcosθ
cosθ =x
r=x
px2+y2y=rsinθ
sinθ =y
r=y
px2+y2
+
+
O−→
ı
−→
θ
r
M
x
y
4
1
/
4
100%