Licence • Maslcr> José-Philippe PÉKEZ Jean-Yves FOURNIOLS
publicité

Licence
José-Philippe
Christophe
Jean-Yves
• Maslcr>
PÉKEZ
L A (î () U T E
FOURNIOLS
Stéphane
BOUHOURS
Electronique
Fondements et applications
%
Avec 250 exercices
et problèmes résolus
\
2' édition
V
DUNOD
Tout le catalogue sur
www.dunod.com
DUNOD
ÉDITEUR DE SAVOIRS
Electronique
Fondements et applications
Avec 250 exercices et problèmes résolus
2e édition
José-Philippe FEREZ
Professeur émérite à l'université Paul-Sabotier de Toulouse
Christophe LAGOUTE
Professeur au lycée Bellevue de Toulouse
Jean-Yves FOURNIOLS
Professeur à l'INSA de Toulouse
Stéphane BOUHOURS
Professeur ou lycée Pierre de Fermât de Toulouse
DUNOD
Le pictogramme qui figure ci-contre d'enseiqnement supérieur, provoquant une
mérite une explication. Son obiet est baisse orutale des achats de livres et de
d'alerter le lecteur sur la menace que revues, au point que la possibilité même pour
représente pour l'avenir de l'écrit,
les auteurs de créer des œuvres
particulièrement dans le domaine DANGER
EP nouvelles et de les faire éditer corde l'édition technique et universl*
redement est aujourd'hui menacée.
r\
Nous rappelons donc que toute
taire, le développement massif du
f
J
reproduction, partielle ou totale,
pholocopillage.
I
/
de la présente publication est
Le Code de la propriété infellec\
tuelledu 1er juillet 1992 interdit LEPHO HUGE interdite sans autorisation de
en effet expressément la photoco- [TUE
TUE LE I IVREj
VRE l'auteur, de son éditeur ou du
pie à usage collectif sans autoriCentre français d'exploitation du
sation des ayants droit, Or, cette pratique aroir
droit ae
de copie (CFC,
icrc,, /u,
20, rue des
s'est généralisée dans les établissements Grands-Augustins, 75006 Paris),
© Dunod, Paris, 2006, 2012 pour la nouvelle édition
ISBN 978-2-10-058115-3
Le Code de la propriété intellectuelle n'autorisant, aux termes de l'article
L. 122-5, 2° et 3° a), d'une part, que les « copies ou reproductions strictement
réservées à l'usage privé du copiste et non destinées à une utilisation collective »
et, d'autre part, que les analyses et les courtes citations dans un but d'exemple et
d'illustration, « toute représentation ou reproduction intégrale ou partielle faite
sans le consentement de l'auteur ou de ses ayants droit ou ayants cause est
illicite » (art, L. 122-4).
Cette représentation ou reproduction, par quelque procédé que ce soit, constituerail donc une contrefaçon sanctionnée par les articles L. 335-2 et suivants du
Code de la propriété intellectuelle.
Table des matières
Avant-propos
Les grands noms de l'électronique
Constantes physiques, notations et symboles
xviii
Description de Fouvragc
xxii
L'électronique en vingt questions
xxv
Introduction expérimentale : Oscilloscopes et multimètres
xxvii
I. — Signaux
xxvii
II. — L'oscilloscope
xxix
IIÏ. —Les multimètres
xxxv
1. Lois de base des circuits en régime stationnaire
I. — Dipôles en régime stationnaire
2
II. — Différents types de dipôles
7
III. — Lois de Kirchholï en régime stationnaire
15
IV. — Associations de dipôles
22
V. — Aspects énergétiques en régime stationnaire
Exercices et problèmes
29
33
2. Lois de base des circuits en régime quasi stationnaire
I. — Lois de Kirchhoff en régime quasi stationnaire
. . . .
II. — Signal sinusoïdal en notation complexe
IIT. — Lois de base en régime sinusoïdal
IV. — Puissance en régime sinusoïdal
V. — Circuits électriques en triphasé
VI. — Distribution d'électricité et problèmes de sécurité . . .
Exercices et problèmes
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
I. — Oscillateur harmonique en électricité
.
II. — Oscillateurs amortis par un élément résistif
III. — Oscillations électriques forcées. Résonance
TV. — Amplitude de l'entrée indépendante de la pulsation
V. — Circuit résonnant parallèle
Exercices et problèmes
108
vi
Table des matières
4. Régimes transitoires
1. — Étude expérimentale
TI. — Établissement d'un régime stationnaire
113
116
III. — Établissement d'un régime variable
134
IV. — Applications
136
V. — Utilisation de la transformation de Laplace
Exercices et problèmes
139
143
5. Théorèmes de base dans l'analyse des réseaux linéaires
I. — Théorèmes de base
149
II. — Cas des sources commandées
III. — Analyse des réseaux
164
IV. — Utilisation de la transformée de Laplace
170
Exercices et problèmes
175
6. Fonctions de transfert Quadripôles
I. — Systèmes électroniques linéaires
II. — Quadripôles et filtres passifs
180
185
III. — Association en cascade de filtres passifs
194
IV. — Caractéristiques des quadripôles
198
Exercices et problèmes
203
7, Composants électroniques
I. — Résistors, condensateurs et quartz
II. — Bobines et transformateurs
210
216
HT. — Diodes semiconductrices et thyristors
222
IV. — Piles et accumulateurs
231
V. — Transistors bipolaires
232
VI. — Transistors à effet de champ
Exercices et problèmes
243
252
8. Amplificateur opérationnel : montages de base
I. — Description et représentation de TAO
257
II. — Électronique non linéaire avec AO
263
III. — Électronique linéaire à base d'AO
270
IV. — Réalisation d'impédances à l'aide d'AO
286
V. — Imperfections de PAO en régime variable
Exercices et problèmes
288
295
9. Amplificateur opérationnel : compléments
I. — Amplificateur à très fort gain
II.—Amplificateur d'instrumentation
302
305
III. — Montages à rétroaction négative avec diodes
306
TV. — Influence des imperfections de PAO
314
Exercices et problèmes
319
Table des matières
vii
10. Filtres actifs
I. — Propriétés des filtres actifs
326
IT. — Filtres actifs d'ordre deux
332
III. — Synthèse de filtres
Exercices et problèmes
339
346
11. Oscillations couplées en électricité
I. — Circuits couplés en régime libre
II. — Modes propres ou normaux de vibration
353
360
III. — Modes de couplage
367
IV. — Système de deux circuits couplés en régime forcé
368
V. — Couplage entre plusieurs oscillateurs
Exercices et problèmes
371
376
12. Effets non linéaires en électronique
I. — Systèmes non linéaires
II. — Transfert non linéaire
380
389
III. — Génération d'harmoniques
398
TV. — Effets non linéaires sur un oscillateur
405
Exercices et problèmes
421
13. Rétroaction. Application aux asservissements
I. — Rétroaction
II. — Rétroaction négative
428
432
m. — Analyse en électronique et en automatique
436
IV. — Stabilité des systèmes à rétroaction négative
438
V. — Réalisation de la rétroaction négative
VI. — Applications physiques des asservissements
Exercices et problèmes
444
447
453
14. Oscillateurs électriques
I. — Différents types d'oscillateurs
459
II. — Oscillateurs quasi sinusoïdaux
463
III. — Oscillateurs de relaxation
475
TV. — Applications
481
Exercices et problèmes
485
15. Signaux déterministes
I. — Rappels sur les systèmes linéaires
II. — Systèmes causaux
491
496
III. — Propriétés énergétiques des signaux
500
IV. — Numérisation des signaux
503
Exercices et problèmes
508
viii
Table des matières
16. Modulation et démodulation
I. — Chaîne de transmission .
II. — Modulation et démodulation d'amplitude
514
III. — Modulation d'argument ou angulaire
526
IV. — Modulation et démodulation spatiales en optique
532
Exercices et problèmes
538
17. Signaux aléatoires et bruits
I. — Statistique des signaux aléatoires
II. — Différents types de bruit
542
545
IIT. — Bruit dans les systèmes
551
IV. — Bruit dans les composants
557
Exercices et problèmes
563
18. Notions d'électronique numérique
I. — Numération et algèbre binaires
II. — Opérateurs logiques
569
575
III. — Technologie des portes logiques
589
IV. — Applications
594
Exercices et problèmes
599
19. Conversions analogique-numérique
I. — Conversion analogique numérique ou CAN
604
II. —Conversion numérique analogique ou CNA
619
Exercices et problèmes
625
20. Théorie de la communication de Shannon
I. — Information manquante associée à une source
TI. — Information mutuelle de deux sources
m. — Canaux de transmission
629
636
645
Exercices et problèmes
654
Annexe 1. Outils mathématiques de base
660
I. — Rappels de trigonométrie
660
II.—Fonctions hyperboliques
661
ITT. — Développements limités au voisinage de zéro
663
IV. — Nombres complexes
665
V. — Matrices
VI. — Équations différentielles
Annexe 2. Analyse de Fourier
I. — Séries de Fourier de fonctions périodiques
II. — Transformation de Fourier
III. — Transformée de Fourier numérique
667
672
676
676
680
691
Table des matières
Annexe 3. Transformée de Laplace
I. — Définition et propriétés
II. — Signaux électroniques usuels
Annexe 4. Fonction Gamma et fonctions de Bessel
I. — Fonction gamma
ix
697
697
704
708
708
II. — Fonctions de Bessel
710
Annexe 5, Lois de probabilité
713
I. — Langage des probabilités
II. — Théorie des probabilités
713
714
III. — Variables aléatoires
715
FV. — Différentes lois de probabilité
718
Annexe 6. Simulation des circuits
I.—Simulations SPICE . .
II. — Conception d'un conformateur sinusoïdal
III. — Oscillateur à comportement chaotique
Réponses aux vingt questions
Solutions des exercices et problèmes
Glossaire
Bibliographie
Index
•a
o
c
3
Û
CM
O
(N
(5)
A-l
JZ
ai
"s_
>a
o
(J
727
734
746
La culture doit rester au-dessus de toute
technique, mais elle doit incorporer à son
contenu la connaissance et l'intuition des
schèmes véritables des techniques.
Gilbert Simondon, Du mode d'existence des objets techniques,
Paris, Aubier, 1958, page 227.
Avant-propos
Ce cours, intitulé Électronique, fondements et applications, correspond globalement à l'enseignement des circuits électriques et de l'électronique donné en licence et master de physique (Ll, L2, L3,
Ml) de l'Université Paul Sabatier, et en Classes Préparatoires aux Grandes Écoles scientifiques (CPGE)
pour les parties élémentaires.
Comme pour les autres ouvrages de la même collection de physique « Fondements et applications »,
il nous a paru intéressant de le découper en leçons progressives et quasi autonomes. On peut y distinguer
trois groupes de leçons.
Dans le premier, on trouve les thèmes classiquement étudiés en première année Ll, ou première
année des CPGE, c'est-à-dire les lois de base appliquées aux circuits, en relation avec l'électromagnétisme; il s'agit précisément des lois de Kirchhoff en régime stationnaire, en régime quasi stationnaire,
des oscillations électriques forcées, de la résonance, des régimes transitoires, des théorèmes fondamentaux des circuits linéaires (de Thévenin, de Norton, etc.) et des fonctions de transfert des circuits passifs.
Dans le deuxième, les thèmes sont ceux couramment enseignés en deuxième année L2 de la licence de physique et en deuxième année des CPGE. On y développe les composants, les amplificateurs
opérationnels, les filtres actifs, les oscillateurs couplés et la rétroaction.
Enfin, dans le troisième groupe, on a rassemblé tous les thèmes généralement étudiés en troisième
et dernière année L3 de la licence, voire en master, c'est-à-dire les effets non linéaires dans les circuits, les oscillateurs électriques sinusoïdaux et de relaxation, les signaux déterministes, la modulation
et la démodulation. En outre, on y trouve des thèmes exigés dans des formations spécialisées ou approfondies, notamment à la préparation à l'agrégation de physique, précisément l'électronique logique et
numérique, la conversion analogique-numérique, le bruit et la théorie de la communication de Shannon.
Cette troisième partie rend incontestablement les objectifs de l'ouvrage ambitieux. Cependant, elle
nous a semblé indispensable pour éviter qu'un ouvrage publié aujourd'hui sous le nom Électronique
n'apparaisse pas trop éloigné des préoccupations actuelles dans ce domaine.
Nous avons tenté de rendre compatible le respect des programmes d'enseignement de la nouvelle licence de physique en trois ans et la nécessaire actualisation de l'électronique. Mises à part l'organisation
xi
Avant-propos
en leçons quasi autonomes (le renvoi à des formules éloignées est pratiquement inexistant), l'illustration par de nombreux exemples numériques et la volonté de ne proposer qu'un seul ouvrage, cet effort
a notamment porté sur les points suivants :
i) L'analyse physique des lois des circuits et la démonstration de tous les théorèmes dérivés
(Millman, Thévenin, Boucherot), le plus souvent à partir des publications originales ; on a ainsi volontairement rompu avec le point de vue des adeptes de la pédagogie du seul savoir-faire.
ii) La volonté de considérer l'électronique comme un excellent et efficace développement de la
physique, et non comme une spécialité autonome, peu rigoureuse, n'exigeant qu'un enseignement pratique.
L'ouvrage s'adresse principalement aux étudiants : il doit donc être clair, efficace, peu coûteux, et
ne pas être un formulaire « sans physique » ou un recueil d'exercices calculatoires « sans intérêt ». Les
exercices proposés à la fin des chapitres décrivent des situations physiques concrètes. Leurs solutions
suffisamment détaillées, données à la fin de l'ouvrage, ou sur le site web :
http ://www.ast.obs-mip.fr/perez
permettront à l'étudiant, et plus largement à l'autodidacte, de tester sa propre compréhension du cours,
de prolonger sa réflexion et de développer son autonomie. Nous pensons ainsi avoir rassemblé, dans un
seul livre, les éléments indispensables à l'acquisition d'un savoir et d'un savoir-faire en électronique.
Ce livre doit beaucoup aux étudiants de la licence de physique, des Classes Préparatoires aux
Grandes Écoles, de l'INSA de Toulouse, aux agrégatifs de physique, ainsi qu'à tous nos collègues
enseignants. Nous les remercions pour leurs remarques et commentaires constructifs.
Les auteurs. Mai 2006
■a
o
c
Û
(M
o
(N
(5)
4-1
-C
O}
"s_
>a
o
u
Les grands noms de l'électronique
André Marie Ampère
Physicien français, né à Lyon en 1775 et mort à Marseille en 1836. A la fois mathématicien, mécanicien, chimiste, il enseigne également la philosophie à la faculté des lettres de Paris. Ses principales
découvertes concernent l'électricité : loi des actions électrodynamiques, hypothèse des courants dans
la matière ; on lui doit les termes de courant et tension pour désigner ces grandeurs électriques. Il devient membre de l'Académie des Sciences en 1814, puis professeur au Collège de France en 1824.
John Bardeen
Physicien américain, né à Madison en 1908 et mort à Boston en 1991. Il contribue de façon décisive à l'essor de deux grands domaines au milieu du XX e siècle : les semiconducteurs et la supraconductivité, ce qui lui valut deux prix Nobel de physique, le premier en 1956 pour la mise au point du transistor à germanium avec W. Brattain et W. Shockley, et le second en 1972 qu'il partage avec L. Cooper
et J. Schrieffer pour la théorie de la supraconductivité dite désormais BCS en hommage à ses auteurs.
Heinrich Georg Barkhausen
Ingénieur allemand, né à Brème en 1881 et mort à Dresde en 1956. Après des études d'ingénieur,
il est nommé en 1911 professeur de physique à l'université de Dresde. Il est connu en électronique pour
avoir produit, avec son collègue K. Kurz, des micro-ondes en faisant osciller le courant dans une triode
à vide. En physique, il a étudié et mis en évidence, par voie acoustique, le processus d'aimantation des
corps feiTomagnétiques (cf. Électromagnétisme).
•a
û
o
Alexander Graham Bell
Physicien et inventeur américain, d'origine écossaise, né à Edimbourg en 1847 et mort au Canada,
près de Baddeck, en 1922. Après un travail sur la phonétique et sur le langage des signes pour les sourdsmuets, il devient professeur de physiologie vocale à Boston et met au point une oreille artificielle, ce
qui le conduit naturellement à l'invention du téléphone en 1876. Cette invention lui rapporte une fortune
qu'il consacre à des actions humanitaires et à des projets scientifiques dans lesquels il fait preuve de
capacités inventives exceptionnelles.
Hendrik W. Bode
Électronicien américain, né à Madison dans le Wisconsin en 1905 et mort à Madison en 1982. Dès
1926, il entre au laboratoire de la compagnie Bell Telephon ; il passe sa thèse en 1935 à l'Université
de Colombia. Il est notamment l'auteur d'un ouvrage sur les circuits linéaires électriques qu'il décrit à
l'aide de deux graphes donnant le module et la phase du facteur d'amplification des circuits en fonction
de la fréquence.
Les grands noms de Vélectronique
xiii
Paul Boucherot
Ingénieur français, né en 1869 et mort en 1943. Il est connu pour ses travaux sur la distribution de
puissance électrique dans les circuits et réseaux électriques, notamment pour le théorème qu'il énonce
pour la première fois au Congrès International de l'Électricité en 1900 : dans un circuit, la somme des
puissances actives et la somme des puissances réactives sont nulles (cf. chapitre 2).
Edouard Branly
Physicien français, né à Amiens en 1844 et mort à Paris en 1940. À la sortie de l'École Normale
Supérieure, il exerce des fonctions de professeur de lycée. Après sa thèse en 1873, où il fait preuve
de grandes qualités expérimentales, il est nommé Directeur adjoint du laboratoire de Physique de la
Sorbonne. Catholique convaincu, il devient professeur de l'Institut Catholique de Paris en 1875. Il est
surtout connu pour le détecteur d'ondes électromagnétiques, le radioconducteur ou cohéreur à limaille,
qu'il invente en 1890 ; ce dispositif est un tube isolant en verre, rempli de limaille de nickel et d'argent,
dont la résistance entre ses extrémités en laiton varie sous l'action des ondes électromagnétiques. Ce
système fut utilisé par Marconi pour réaliser des liaisons par ondes électromagnétiques sur de grandes
distances.
Walter Brattain
Physicien américain, né à Amoy, en Chine, en 1902 et mort à Seattle en 1985. Après ses études
universitaires, il est recruté par la compagnie Bell Telephon, principalement pour effectuer un travail expérimental. C'est là qu'il rejoint l'équipe de W. Shockley, où se trouve le physicien théoricien J. Bardeen, et qu'il montre des qualités exceptionnelles d'expérimentateur. Cette collaboration à trois aboutit,
en 1948, à l'invention du transistor, ce qui leur valut le prix Nobel en 1956.
Thomas Edison
Expérimentateur américain de génie, né à Milan (dans l'Ohio) en 1847 et mort à West Orange
(New Jersey) en 1931. Très jeune (à 17 ans), il réalise un télégraphe bidirectionnel alors qu'il n'est qu'un
simple opérateur télégraphiste. Il invente ensuite le phonographe, perfectionne la lampe à incandescence
et développe la production et le transport de puissance électrique. En industriel habile, il met en œuvre
l'électrification de New-York. Cependant, il se fâche avec son ingénieur Nicolas Tesla, lequel tente en
vain de le convaincre des avantages techniques du courant alternatif. On retient principalement d'Édison
qu'il est le premier des scientifiques à avoir su développer une exploitation industrielle de ses propres
découvertes scientifiques.
•a
Michael Faraday
Physicien et chimiste anglais, né à Southwark en 1791 et mort àHampton Court en 1876. Garçon de
courses chez un bibliothécaire, il devient autodidacte en lisant de nombreux ouvrages scientifiques, notamment de chimie. Employé dans un laboratoire de chimie comme apprenti, il se révèle rapidement
expérimentateur de génie. Il devient alors directeur du laboratoire et professeur de chimie. Ses contributions remarquables furent d'abord l'énoncé des lois de l'électrochimie et la découverte du benzène
en 1824. En 1854, il énonce la célèbre loi de l'induction puis la nature discontinue de la charge électrique et la propriété de cette dernière d'être conservative, c'est-à-dire de ne pouvoir être ni créée ni
détruite.
John Fleming
Ingénieur électricien anglais, né à Lancaster (au nord-ouest de Leeds) en 1849 et mort à Sidmouth
(dans le sud-ouest de l'Angleterre) en 1945. Après ses études d'ingénieur, J. Fleming entre au laboratoire Cavendish dirigé par Maxwell et devient professeur. Il est connu pour avoir inventé la diode à vide.
xiv
Les grands noms de Vélectronique
constituée d'une cathode, qui émet des électrons lorsqu'elle est chauffée (effet thermoélectronique découvert par Edison), et d'une anode qui les recueille. Son but était de mettre au point un dispositif de
détection des ondes radioélectriques. Il déposa un brevet sur la diode en 1904. Sur un plan pédagogique, c'est lui qui propose la règle des trois doigts de la main droite, équivalente à celle du bonhomme
d'Ampère.
Lee de Forest
Ingénieur américain, né à Council Bluffs dans l'Iowa en 1873 et mort à Hollywood en Californie
en 1961. Il invente la triode à vide en ajoutant, entre les deux électrodes de la diode de Fleming, une
troisième électrode, appelée grille. Cette dernière permet de commander le courant du circuit anode, ce
qui est à la base des tubes à vide amplificateurs de tension.
Joseph Fourier
Mathématicien et physicien français, né à Auxerre en 1768 et mort à Paris en 1830. Alors qu'il
est préfet de l'Isère, il remporte le prix de l'Académie des Sciences pour son traitement mathématique de la diffusion thermique, à l'aide des séries trigonométriques. Il est le premier à avoir souligné
le caractère fondamentalement irréversible de la diffusion thermique. La décomposition d'un signal variable en ses composantes sinusoïdales est devenue essentielle dans toutes les branches de la physique ;
elle est aujourd'hui connue sous le nom d'analyse de Fourier.
Joseph Henry
Physicien américain, né à Albany en 1797 et mort à Washington en 1878. Spécialiste d'électromagnétisme, il découvre en 1832 l'auto-induction. On a donné son nom à l'unité internationale d'inductance.
Oliver Heaviside
Physicien britannique, né à Londres en 1850 et mort à Torquay (station balnéaire anglaise) en 1925.
II dut quitter l'école en raison d'une surdité précoce ; aussi est-ce en autodidacte qu'il publie quelques
contributions en électricité, dont la plus importante, la formulation vectorielle des équations de Maxwell. En 1902, il prédit l'existence de couches conductrices, dans l'ionosphère, lesquelles permettent
d'expliquer la propagation des ondes radioélectriques entre des point distants sur la Terre, grâce à la réflexion sur ces couches. C'est lui qui a introduit, en électricité, la « fonction échelon » ; aussi cette dernière est-elle, ajuste titre, appelée souvent fonction d'Heaviside.
Heinrich Hertz
Physicien allemand, né à Hamburg en 1857 et mort à Bonn en 1894. II démontre en 1877 l'existence
des ondes électromagnétiques, prévues par Maxwell, et fonde le domaine des télécommunications.
John Bertrand Johnson
Ingénieur américain d'origine suédoise, né en 1887 et mort en 1970. Employé des laboratoires de
la compagnie Bell Telephon, il découvre en 1927 le bruit de la tension aux bornes d'un conducteur
ohmique, lequel fut interprété par H. Nyquist. C'est à lui aussi que l'on doit la découverte en 1925 du
bruit en 1//.
James Joule
Physicien anglais, né à Salford (près de Manchester) en 1818 et mort à Manchester en 1889. Expérimentateur de génie, il fait connaître les idées de von Mayer en étudiant les conversions énergétiques
thermoélectriques (effet Joule) et thermomécanique (équivalent mécanique de la calorie).
Les grands noms de Vélectronique
xv
Arthur Edwin Kennely
Électronicien américain, né en 1861 à Coloba, près de Bombay, et mort à Boston en 1939. Entré
comme simple opérateur télégraphiste à l'Eastern Telegraph, il devient le principal assistant de Thomas
Edison. En 1902, il est nommé professeur d'électrotechnique à Harvard. Ses travaux concernent surtout Télectrotechnique théorique. Il a donné son nom à un théorème sur l'équivalence des systèmes de
conducteurs disposés en étoile et en triangle, équivalence précieuse dans la distribution de puissance
électrique.
Gustav Robert Kirchhoff
Physicien allemand, né à Kœnisberg en 1824 et mort à Berlin en 1887. Il est surtout connu pour ses
travaux en électricité, précisément pour les lois des courants dérivés, qu'il établit en 1845 (à 21 ans !) et
qui depuis portent son nom. On lui attribue aussi l'établissement de l'équation des télégraphistes. Après
sa thèse en 1847, il devient professeur à l'Université de Brestlau. C'est là qu'il collabore avec Robert
Bunsen sur la théorie du corps noir. La construction d'un spectroscope lui permet de découvrir le césium
et le rubidium en 1860.
Pierre-Simon de Laplace
Astronome, mathématicien et physicien français, né à Beaumont-en-Auge en 1749 et mort à Paris
en 1827. Bien que professeur de mathématiques et homme politique, ses travaux en physique sont nombreux. Il signe diverses contributions sur la capillarité, la propagation du son dans l'air, l'évolution adiabatique des gaz et le travail des forces électromagnétiques. Cependant, c'est sa publication sur la mécanique céleste, Exposition du système du monde, qui est la plus remarquée. On y trouve développée
notamment les fondements d'une physique totalement déterminisme.
Guglielmo Marconi
Physicien italien, né à Bologne en 1874 et mort à Rome en 1937. Passionné très tôt par l'expérimentation en physique, mais peu intéressé par des études universitaires, Marconi tente de réaliser, dans
la propriété familiale, un oscillateur capable de transmettre des informations à distance par voie hertzienne. Il y parvient en 1895, en s'appuyant sur les travaux de Hertz et de Branly notamment. N'étant pas
soutenu par les autorités de son pays, il poursuit avec succès ses travaux en Angleterre ; en 1901, il parvient à réaliser une transmission radio entre Cornouailles en Angleterre et Terre-Neuve. II reçoit le prix
Nobel en 1909. Tout en améliorant la transmission hertzienne sur le plan technique, il oriente son activité vers la réalisation industrielle et vers la création d'émissions radiophoniques. C'est ainsi qu'il
participe à la fondation de la BBC en Angleterre.
c
James Clerk Maxwell
Physicien britannique, né en 1831 en Écosse à Dumfrieshire et mort à Cambridge en 1879. En
1857 il publie un article sur la constitution probable des anneaux de Saturne, ce qui le fait connaître
de la communauté scientifique et l'incite à s'intéresser au système constitué d'un grand nombre de particules. Il établit alors les principaux résultats de la théorie cinétique des gaz. C'est ensuite comme
professeur d'université au King's Collège de Londres qu'il travaille sur l'électromagnétisme, chez lui,
assisté par son épouse. Il est ensuite nommé à Cambridge pour diriger la construction du célèbre Cavendish Laboratory.
u
Jacob Millman
Électronicien américain d'origine russe, né en 1911 et mort à Boston en 1988. Diplômé du MIT
(Massachussets Institute of Technology), il devint professeur d'ingéniérie électrique à l'Université
Colombia. Tout au long de sa carrière, entre 1941 et 1987, il écrivit plusieurs livres d'électronique.
II est surtout connu pour avoir établi le théorème qui porte son nom, dans lequel la loi des nœuds est exprimée en fonction des tensions.
xvi
Les grands noms de Vélectronique
Edward Lawry Norton
Ingénieur électronicien américain, né à Rockland (Maine, USA) en 1898 et mort à Chatham (New
Jersey, USA) en 1983. Il travailla durant toute sa carrière, pendant quarante et un ans, jusqu'en 1963,
aux laboratoires de la compagnie Bell Telephon. C'est en 1945 qu'il établit un théorème, analogue au
théorème de Thévenin, dans lequel les sources de tension sont remplacées par des sources de courant.
Curieusement, il ne publia que trois articles dont aucun ne mentionne ce théorème. Ce dernier ne figure
que dans un rapport technique de 1926.
Harry Nyquist
Ingénieur américain des laboratoires Bell Telephon, né en Suède en 1889 et mort à Harlingen
aux Pays-Bas en 1976. C'est lui qui, dès 1930, introduit le concept de rétroaction négative sur les
amplificateurs. Il participe activement au développement des asservissements pendant la seconde guerre
mondiale. Il est surtout connu pour ses travaux sur les critères de stabilité des systèmes à rétroaction. En
outre, il interprète le bruit de tension aux bornes d'un conducteur ohmique, découvert par Johnson.
Georg Simon Ohm
Physicien allemand, né à Erlangen en 1789 et mort à Munich en 1854. Alors qu'il est professeur au collège de guerre de Berlin, il découvre la loi sur les circuits linéaires entre tension et courant,
qu'il publie en 1827 dans son ouvrage Die galvanische Kette. mathematish bearbeitet. En 1849, il devient professeur de physique à l'Université de Munich. On a donné son nom à l'unité internationale de
résistance.
Claude Shannon
Ingénieur américain, né à Gaylord (Michigan) en 1916 et mort des suites de la maladie d'Alzheimer à Medford (Massachusetts) en février 2001. Durant ses études au MIT (Massachusetts Institute of
Technology), il prouve que les règles de l'algèbre de Boole peuvent être appliquées à de simples circuits
électriques, un relais ouvert étant associé au chiffre 1 et un relais fermé au chiffre 0. En 1938, sa thèse,
intitulée « Analyse symbolique des relais et commutateurs », connaît un fort retentissement. Il s'inspire alors de la théorie de Boltzmann en physique statistique. Il s'intéresse ensuite à la mise au point des
systèmes téléphoniques et des ordinateurs. Dans ce contexte, il a fortement contribué à la première victoire au jeu d'échecs de l'ordinateur Deep Blue d'IBM sur le grand maître russe G. Kasparov.
Walter Schottky
fM
Physicien allemand, né à Zurich en 1886 et mort à Pretzfeld en Allemagne en 1976. Professeur de
physique théorique à Rostock, il est connu pour ses recherches sur le mouvement des électrons dans les
conducteurs et dans les tubes à gaz. En 1920, il découvre l'effet de granulation des électrons qui porte
désormais son nom. Il inventa, indépendamment d'Edwin Amstrong, le récepteur superhétérodyne.
William Shockley
Physicien britannique né à Londres en 1910 et mort à Palo Alto en Californie en 1989. Après sa
thèse au Caltech (California Institute of Technology), Shockley est employé à la compagnie Bell Telephon dans le but de remplacer les tubes à vide encombrants, notamment la triode, par des composants
solides plus petits et plus fiables. Il y pâment en 1948, avec l'aide d'un théoricien J. Bardeen et d'un
expérimentateur W. Brattain ; il invente ainsi le transistor, ce qui lui vaut le prix Nobel en 1956. Il termine sa carrière sur un poste de professeur d'ingéniérie à Stanford qu'il occupe à partir de 1963. Ses
prises de position sur l'amélioration de la race humaine, notamment par la stérilisation des « faibles »
et le don du sperme des savants, surprennent et déçoivent une grande partie de la communauté scientifique internationale.
Les grands noms de l'électronique
xvii
Nicolas Tesla
Ingénieur croate, né à Smiljan en 1856 et mort à New-York en 1943. Employé d'abord par les
compagnies d'équipements électriques de Budapest, puis par Edison aux USA, il invente plusieurs dispositifs, dont le moteur polyphasé et le moteur à courant alternatif. Il fonde aux USA une société de
construction de moteurs en courant alternatif ; ses résultats font de lui le fondateur de l'électrotechnique
moderne. Il est le premier à montrer l'intérêt du transport de la puissance électrique sous une tension variable, en augmentant la tension avant le transport et en la diminuant après, à l'aide de transformateurs.
Cette invention fut largement utilisée par l'inventeur et industriel américain G. Westinghouse. Piètre gérant de ses inventions, Tesla finit sa vie misérablement à New-York.
Léon Charles Thévenin
Ingénieur français de l'École Polytechnique, né à Meaux en 1857 et mort à Paris en 1926. Il est
surtout connu pour avoir établi un théorème très utile qui permet de considérer un réseau linéaire entre
deux points comme une source de tension entre ces points.
Alessandro Volta
Physicien italien, né à Corne en 1745 et mort aussi à Corne en 1827. Il est connu pour avoir introduit
la pomme de terre en Italie et pour ses recherches en électricité qui le conduisent à inventer la pile
électrique. Il fut fait comte par Bonaparte en 1801. L'unité SI de tension électrique dérive de son nom.
Balthasar van der Pol
Physicien hollandais, né à Utrecht en 1889 et mort en 1959.11 obtint son doctorat de physique en
1920, sous la direction de J. Fleming et J. Thompson. Intéressé par les aspects modernes de la physique expérimentale, il s'engage dans l'analyse de la stabilité des oscillations électriques, obtenues avec
des circuits comportant des tubes à vide. Il découvre alors les mouvements chaotiques de nature déterministe, ce qu'il publie, dans le journal britannique Nature, en 1927, avec van der Mark. Il proposa aussi
différents modèles pour représenter le mouvement périodique du cœur, dans le but de soigner les patients atteints d'arythmie.
Charles Wheatstone
Physicien britannique, né à Gîoucester en 1802 et mort à Paris en 1875. Autodidacte passionné par
la technique, il s'intéresse d'abord à la propagation des sons produits par des instruments musicaux. Il
est surtout connu pour avoir perfectionné un dispositif, imaginé plus tôt par Samuel Christie, qui lui
permet de mesurer avec précision une résistance par la méthode du pont, laquelle porte désormais son
nom. C'est lui qui inventa le relais électrique ou interrupteur électrique commandé à distance.
Max Wien
Physicien allemand, né en 1866 à Konisberg et mort à lena en 1938. Nommé professeur à l'École
Technique de Dantzig en 1904, puis à l'Université d'Iena en 1911, il travaille sur les oscillateurs électriques et sur la télégraphie sans fil ; son nom est associé à l'oscillateur bien connu et au filtre de particules utilisé en optique corpusculaire. Il ne faut pas le confondre avec son cousin Wilhem Wien, connu
lui pour avoir donné son nom à une loi sur le rayonnement du coips noir (cf. Thermodynamique).
Clarence Zener
Physicien américain, né à Indianapolis (Indiana) en 1905 et mort en 1993. Après sa thèse en physique quantique sur les molécules diatomiques, qu'il obtient à Harvard en 1930, il travaille dans les
laboratoires Bell ; là, il interprète la forte conduction qui apparaît lorsqu'une diode est connectée en inverse et soumise à un champ électrique intense : par effet tunnel, les électrons de la bande de valence
peuvent passer dans la bande de conduction. Cette diode, appelée depuis diode Zener, est utilisée pour
réaliser des tensions stationnaires stabilisées.
Constantes physiques, notations et symboles
Les symboles utilisés sont généralement ceux recommandés par l'AFNOR et par l'UTE (Union Technique de l'Electricité)
e= 1,602176462(63) x 10-I9C
charge élémentaire (charge du proton)
—e
charge de F électron
eV= 1,602176462(63) x lO"19 J
électron-volt
£o = 8,854 187 817 x lO"12 F - m-1
permittivité du vide (valeur exacte)
cfc = e2/(473-60 )
q2e = 230.707 705 6 x lO"30 SI
— 47r x 10"7 H ■ m-1
perméabilité du vide (valeur exacte)
c = 2,997 924 5 8 x 108 ^3x lO^ s-'
vitesse de la lumière dans le vide
(valeur exacte)
me = 0,910938 188(72) x 10-30kg,
masse de l'électron
2
(mec = 0,510998 MeV fy 0,511 MeV )
mp = 1,67262158(13) x lO"27 kg,
masse du proton
(inpc- = 938,272 MeV)
•d
o
c
3
Û
CM
iH
O
fM
(0)
4->
s:
r~T-i
O'
's>
Q.
O
U
h = 6,62606876(52) x lO"34 J • s
constante de Planck
h = h/iliT) = 1,054571596(82) x 10"34 J-s
constante de Planck divisée par 277- (h bar)
re = q2e/{inec2) = 2,817 93423 x lO^15 m
rayon classique de l'électron ( re « 2,8 fm )
G = 6,673(10) x 10-11 m3 • kg-1 • s-2
constante de gravitation
R = 8,314472(15) J-mol-' Kr1
constante molaire des gaz parfaits
Na = 6.022141 99(47) x 1023 mol"1
nombre d'Avogadro
kB = R/Na = 1,3806503(24) x lO"23 J-K"1
constante de Boltzmann
F = NAe = 96485,34.1 5(39) C • mor1
constante de Faraday
= ehl(2me) = 927,400 899(37) x lO"26 J-T-'
magnéton de Bohr
pN = eh/{2}np) = 5,050783 17(20) x lO"27 J ■ T" [ magnéton nucléaire
^o = /i/(2£) = 2,067 833636(81) x IQ-'5 Wb
1
quantum de flux magnétique
rk = h/e = 25 812, 807 572(95) fl
constante de von Klitzing.
a = q2/(hc)l. 297 352533(27) « 1/137,036
constante de structure line.
xix
Constantes physiques, notations et symboles
loganthme népérien
logarithme décimal
logarithme binaire
exponentielle
sensiblement égal à
de l'ordre de
Symbole de la masse en électricité, origine des tensions dans un montage, et symbole de la terre
valeur moyenne du signal.?(/) au cours du temps
signal analytique associé au signal réel s{t)
valeur moyenne du signal ^ sur un ensemble statistique
signe de 5
valeur complexe associée à s
module de s
complexe conjugué de s
parties réelle et imaginaire du signal s
intensité d'un courant stationnaire et intensité efficace d'un courant sinusoïdal
intensité d'un courant dans un conducteur dans le
sens A vers B
tension stationnaire et tension efficace d'une tension
sinusoïdale
tension entre les points A et B, aux potentiels respectifs VA et VB
intensité d'un courant variable
tension variable
forces électromotrices stationnaire et variable (f.e.m)
courants électromoteurs stationnaire et variable
(c.e.m) ; prononcer iota
puissances électriques instantanée, moyenne ou active, réactive, apparente, complexe
résistance et conductance d'un résistor
capacité d'un condensateur
inductance propre et inductance mutuelle
f.e.m et résistance interne d'un générateur de Thévenin en régime stationnaire
f.e.m et impédance interne d'un générateur de Thévenin en régime sinusoïdal
c.e.m et conductance d'un générateur de Norton en
régime stationnaire
c.e.m et admittance d'un générateur de Norton en régime sinusoïdal
1KX
Constantes physiques, notations et symboles
T,f, w
i(t) = im cos{ù)t + 0/) — I\/2cos{cût + <^£-)
i{t) = i,n exp[/(W + (fri)]
période, fréquence, pulsation d'un signal sinusoïdal
intensité d'un courant sinusoïdal
expression complexe de l'intensité d'un courant sinusoïdal ou intensité analytique
u(t) = umcos{(ot + 0!() = t/\/2'cos(W4- (f>u) tension sinusoïdale
u{t) = umexp\j{o)t + (f)u)]
expression complexe d'une tension sinusoïdale ou
tension analytique
cp = (fru- (fri
déphasage de la tension sinusoïdale par rapport à
l'intensité du courant sinusoïdal
q
Z = R+jX
charge électrique
Y = \ jZ = G + jB
admittance F, conductance G et susceptance B d'un
dipôle
y
conductivité d'un matériau, inverse de la résistivité p
impédance Z, résistance R et réactance X d'un dipôle
îei iet Ge, Ue, Ue
intensités et tensions à l'entrée d'un système
!.<!> 4" 5 Îj'
M S, M y
Ze,Zs, Re, Rs
intensités et tensions à la sortie d'un système
xe,xs
matrices colonnes tension-courant à l'entrée et à la
sortie d'un quadripôle
Uz,Ud
tension Zener et tension de seuil d'une diode
AO
amplificateur opérationnel
e = w+ — M_
tension entre les bornes non inverseuse et inverseuse
d'un AO
impédance d'entrée et de sortie, résistance d'entrée
et de sortie
tensions d'alimentation et de saturation d'un AO
•d
o
c
Û
(M
iH
O
fN
(0)
4-J
_Di
"s_
>
CL
O
U
//(/6>)=i(/)=2iW
fonction de transfert en électronique, x étant la pulsation réduite ou la fréquence réduite
//(o) = i{0) = n(0)
facteur d'amplification stationnaire en tension
Gu = 201g\T(f)\
gain en tension exprimé en décibel
TFWO} ou?{f)
TL-jAiV)} ou S{p)
transformée de Fourier de la fonction s(t)
î(f),W)
spectres de Fourier de /(/) et de u{t)
rect(t)
fonction créneau, de valeur 1 pour |/| ^ 0, 5
sinc(ï) = sin(7rt)/(-7rï)
fonction sinus cardinal
Y(f)
fonction d'Heaviside ou échelon
5
et
W
Au
E^-oo ^ -
transformée de Laplace de la fonction s{t)
nT
)
distribution de Dirac et peigne de Dirac
facteur d'amplification en tension
IX
coefficient d'atténuation linéique en intensité.
Sa{t)
Cn{i)
signal analytique associé au signal réel s{t)
fonction d'intercorrélation entre deux signaux s\{t)
et 52W
xxi
Constantes physiques, notations et symboles
s(t) = a!Km[l + mgi(t)] cos{û)pt)
expression canonique d une porteuse, de fréquence
fp = ojp/{27r), modulée en amplitude
coefficient de modulation de fréquence
coefficient de modulation de phase
s{r;A)
expression d'un signal aléatoire, A étant la variable
aléatoire
variance d'un signal aléatoire
RSB
rapport signal sur bruit
Is = -]bPs
information associé au message
H = -y2Ps\hp
entropie de Shannon associée à un ensemble de messages s de probabilité Ps.
de probabilité Pi-
Alphabet grec
alpha
A
a
H
u
nu
N
p
bêta
B
B
gamma
F
y
A
8
kappa
K
k
pi
chi
X
x
epsilon
E
e
lambda
A
A
rho
psi
x
y
é
zêta
Z
C
M
/x
sigma
oméga
fî
co
upsilon
omicron
O
o
ï
phi
v
é
Description de l'ouvrage
Cet ouvrage « Électronique, fondements et applications » comporte trois grandes parties qui correspondent aux différentes étapes de l'enseignement de cette discipline dans les Universités ou dans les
Classes Préparatoires aux Grandes Écoles scientifiques. L'organisation du cours est la suivante :
i) Première année de la licence : fondements
Leçons 1 à 8 : lois de Kirchhoff en régimes stationnaire et variable sinusoïdal, oscillations forcées,
résonance, régimes transitoires, théorèmes de base sur les circuits linéaires, composants électroniques,
amplificateurs opérationnels.
ii) Deuxième année de la licence : développements
Leçons 9, 10, 11, 13, 14, 15 : compléments sur les amplificateurs opérationnels, filtres actifs, oscillations couplées, rétroaction et asservissements, oscillateurs électriques, signaux déterministes.
iii) Troisième année de la licence et master : compléments
Leçons 12,16, 17,18,19,20 : effets non linéaires, modulation et démodulation, bruits, électronique
logique et numérique, conversion analogique-numérique, théorie de la communication de Shannon.
■d
o
Les leçons 1, 2, 5, 6, 8, 13, 15, 17, ont un rôle central, car elles contiennent les éléments indispensables (définitions, lois et principes) à l'étude des leçons qui suivent. Il faut donc les étudier avant
d'aborder les suivantes. Par exemple, si l'on souhaite étudier la leçon 14 sur les oscillateurs électriques,
il est recommandé de lire auparavant les leçons 1, 2, 5, 6, 8 et 13. Même si les autres leçons sont présentées dans un certain ordre, il est possible de les lire dans un ordre différent qui tienne compte des
préoccupations particulières du lecteur ; en effet, les leçons sont quasi autonomes et le renvoi à des formules éloignées pratiquement inexistant.
Méthode de travail
(M
Lecture des leçons
Dans une phase d'initiation, une leçon doit être lue une première fois, en insistant sur l'introduction, laquelle situe cette leçon dans l'ensemble du cours, et sur la conclusion qui répertorie l'ensemble
des résultats essentiels. Dans une deuxième phase, l'étudiant doit refaire avec soin tous les calculs intermédiaires. Enfin, une dernière lecture devrait lui permettre d'appréhender complètement la leçon,
notamment les résultats essentiels, les exemples significatifs et les ordres de grandeur.
Exercices et problèmes
L'étudiant doit ensuite passer à la phase d'application en faisant des exercices simples et courts,
directement liés au contenu de la leçon ; il doit tenter de résoudre ces exercices avec le seul support que
constitue le cours. En cas de difficultés, un coup d'œil rapide sur la solution, proposée en fin d'ouvrage
ou sur le site web correspondant, devrait l'aider. Il lui faut éviter une simple lecture rapide de la solution
Description de l'ouvrage
xxiii
proposée et la mémorisation de la démonstration : mieux vaut revenir sur les fondements de la leçon
pour résoudre l'exercice ; en cas de difficulté majeure, consulter la solution et tenter de la refaire, sans
aucune aide, un ou deux jours plus tard.
Une fois ces exercices de base rédigés, l'étudiant pourra affronter des épreuves plus longues inspirées d'examens et concours.
Révision
Pour réviser, une ultime lecture devrait conforter l'apprentissage. Ne pas hésiter à souligner au
crayon les parties essentielles et à porter en marge des remarques personnelles, suggérées par la lecture
d'autres livres ou de documents annexes, tels que des revues scientifiques à grand public (La Recherche,
Pour la Science, Science et Vie, Électronique pratique, etc.).
Comment résoudre un problème sur les circuits
On résout correctement un problème sur les circuits, si l'on s'astreint à répondre successivement à
plusieurs questions, même lorsque le texte n'invite pas explicitement à y répondre.
Le régime du circuit est-il stationnaire quasi stationnaire ou transitoire ?
En régime stationnaire, on ne prend en compte que les générateurs et les résistors du circuit,
les condensateurs éventuels se comportant comme des interrupteurs ouverts, les diodes pratiquement
comme des interrupteurs fennés dans le sens passant et comme des interrupteurs ouverts dans le sens
inverse (cf. chapitre 1).
En régime quasi stationnaire sinusoïdal, l'analyse est analogue à la précédente, pourvu que l'on
utilise la notation complexe pour exprimer les impédances associées à une inductance et à une capacité,
respectivement jLco et 1 /{jC(à) (cf. chapitre 2). Soulignons que ce concept d'impédance n'a de sens
qu'en régime sinusoïdal ; en régime quelconque pour les circuits linéaires une analyse de Fourier est
indispensable.
En régime transitoire, la relation vérifiée par les grandeurs du circuit se présente sous la forme
d'une équation différentielle ; la résolution de cette dernière nécessite la connaissance des conditions
initiales du circuit.
Peut-on ramener le circuit à un diviseur de tension ou à un diviseur de courant ?
Très souvent, les circuits simples se présentent comme des diviseurs de tension ou de courant,
auxquels cas les expressions à retenir, duales l'une de l'autre, sont (cf. chapitre 1) :
Ui = —^-—U
R\+R2
et
/, = _ G'
/
G, + G2
Dans tous les cas, on doit tenter de simplifier le circuit (associations de dipôles, théorème de Thévenin, etc.) autour du dipôle étudié.
N'est-il pas préférable d'appliquer la loi des nœuds sous la forme du théorème de Millman ?
Lorsque les grandeurs intéressantes sont des tensions ou leur rapport, il est préférable d'éliminer
directement les intensités et d'écrire la loi des nœuds en fonction des tensions. C'est précisément ce que
permet le théorème de Millman (cf. chapitre 1).
Le circuit présente-t-il des éléments de symétrie ?
L'analyse des symétries d'un circuit permet de vérifier la cohérence physique des résultats obtenus
et d'éviter des calculs fastidieux.
xxiv
Description de l'ouvrage
Le système étudié est-il linéaire ou non ?
Cette question est essentielle, car une faute fréquente consiste à appliquer, à des circuits comportant
des éléments non linéaires, des théorèmes fondés précisément sur la linéarité (cf. chapitre 5).
Doit-on effectuer un calcul en notation réelle ou en notation complexe ?
Rappelons que la notation complexe n'est qu'un intermédiaire technique commode, voire indispensable, que l'on doit utiliser uniquement en régime sinusoïdal. En régime quelconque, une analyse de
Fourier s'impose. Concernant la puissance en régime sinusoïdal, comme il s'agit d'une grandeur quadratique, le retour à la notation réelle est recommandé, à moins d'introduire le concept commode de
puissance complexe (cf. chapitre 2).
La caractéristique I{U) des dipôles est-elle tracée en convention récepteur ou non ?
Dans tout l'ouvrage, nous avons privilégié la convention récepteur (de puissance) des dipôles, à
la fois pour des raisons d'efficacité pédagogique et de conformité aux conventions adoptées en physique, précisément en thermodynamique : certains dipôles, tels que la photodiode, se comportent soit en
récepteur (photodétecteur) soit en générateur (photopile). En outre, les caractéristiques de tous les dipôles ont été mises sous la forme standard 1{U), car très souvent l'entrée du dipôle, considéré comme
un système, est la tension d'entrée alors que la sortie est l'intensité du courant qui le parcourt.
La loi d'Ohm s'applique-t-elle ? Comment ?
S'il s'agit d'un conducteur ohmique, la loi d'Ohm s'applique sous les formes simples U = RI o\x
I = GU, encore faut-il préciser que, si A el B sont les bornes du dipôle, cela suppose précisément
que :
U=UAB = UA-UB et f = IAB
Une façon mnémotechnique de retenir ce résultat est de noter que ces formules sont valables si les
flèches de courant et de tension sont de sens opposés.
Quel est le nombre de variables indépendantes dont dépend l'état électrique du système ?
Une fois écrites les équations exprimant les lois physiques (de Kirchhoff, d'Ohm, de Faraday, etc.),
effectuer le décompte du nombre de variables indépendantes, dont dépend l'état électrique du système,
est essentiel avant de tenter de résoudre le système d'équations obtenues.
Comment résoudre le système d'équations des circuits ?
Tout dépend du nombre de variables. S'il est faible, inférieur ou égal à deux, la méthode de substitution est la plus rapide. S'il est de trois ou quatre, la méthode matricielle est intéressante. Au-delà, il
vaut mieux prévoir l'utilisation d'un logiciel, par exemple MATLAB.
Interpréter les résultats obtenus, notamment leur signe, et discuter la réalité des ordres de
grandeur ?
Cette phase finale est essentielle, car elle permet de déceler des erreurs de maladresse. Les résultats obtenus sont algébriques : il convient donc d'estimer la crédibilité d'une intensité parcourant un
conducteur dans le sens opposé à celui adopté a priori ou d'une intensité trop grande pour être réaliste.
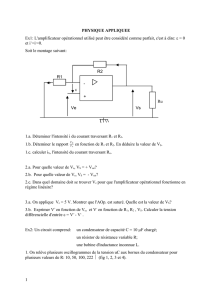
L'électronique en vingt questions
1. Si on utilisait l'expression V = RI1 de la puissance reçue par un résister, aux bornes duquel une
pile impose une tension U, on serait conduit à conclure que la puissance est proportionnelle à ^, ce
qui est incorrect. Pourquoi ?
2. La mesure, à l'aide d'un obmmètre, de la résistance du filament d'une lampe à incandescence, sur
laquelle on lit les indications 100 W pour la puissance et 230 V pour la tension efficace, donne 40 fl.
Pourquoi la puissance inscrite n'est-elle pas 2302/40 = 1 322,5 W ?
3. Les distributeurs de puissance électrique utilisent préférentiellement des tensions sinusoïdales triphasées et de forte amplitude, qu'ils transforment en tensions monophasées, de faible amplitude, près
de l'utilisateur. Pourquoi ?
4. On mesure les différentes tensions efficaces aux bornes du générateur, du résistor, de la bobine et du
condensateur, dans un circuit résonnant série. On constate que la première tension n'est pas la somme
des trois autres. Pourquoi ?
5. Une pile électrique, de f.e.m 1,5V, connectée aux bornes d'une diode, de tension de seuil 2,5 V,
ne rend pas cette dernière passante, contrairement à deux de ces mêmes piles placées en série. Pourquoi
le théorème de superposition ne s'applique-t-il pas dans ce cas ?
6. Pourquoi polarise-t-on une diode Zener en inverse ?
7. Un amplificateur peut fournir à sa sortie un signal variable d'une puissance supérieure à la puissance
du signal d'entrée. Pourquoi ce résultat n'est-il pas en contradiction avec le premier principe de la
thermodynamique, selon lequel on ne peut pas créer de l'énergie (cf. Thermodynamique) ?
X5
O
CM
8. La résistance ohmique d'un conducteur est toujours positive. Or, on entretient les oscillations électriques produites dans un circuit oscillant en compensant la résistance ohmique de la bobine et du
condensateur par un système de résistance négative. Pourquoi cette dernière affinnation est-elle néanmoins fondée ?
9. Pourquoi exprime-t-on généralement le facteur d'amplification en tension d'un amplificateur ou
d'un filtre par son gain en décibel et définit-on la bande passante de cet amplificateur à —3 dB ?
10. Pourquoi, dans les montages de base d'un amplificateur opérationnel, les résistances ne doiventelles être ni trop faibles, ni trop fortes ?
4—'
CL
11. Les bobines ne sont pratiquement plus utilisées en électronique, les diodes Esaki (à effet tunnel)
non plus. Pourquoi ?
12. Les filtres passifs sont le plus souvent délaissés au profit des filtres actifs. Pourquoi ?
13. L'espace des phases en théorie des circuits peut être de dimension impaire, alors qu'en mécanique
il est nécessairement de dimension paire. Pourquoi ?
14. Sur un oscilloscope convenablement synchronisé, on peut observer la trace parfaitement stable
des signaux délivrés par un oscillateur auto-entretenu, alors que ces derniers sont présentés comme des
systèmes instables. Pourquoi ?
xxvi
L'électronique en vingt questions
15. La fréquence d'un signal sinusoïdal est une grandeur physique définie positive, homogène à l'inverse d'une durée. Pourquoi le spectre de Fourier de ce signal fait-il apparaître des fréquences négatives ?
16. Il est possible d'échantillonner des signaux analogiques, c'est-à-dire de ne considérer que certaines valeurs, prises périodiquement, sans aucune perte d'information. Cette affirmation apparemment
paradoxale est cependant vérifiée. Pourquoi ?
17. Dans l'enregistrement numérique des sons sur CD, les principaux constructeurs se sont entendus
pour utiliser la fréquence d'échantillonnage de 44,1 kHz. Pourquoi ?
18. Pourquoi la transmission des ondes électromagnétiques à grande distance exige-t-elle la modulation en amplitude ou en fréquence d'une onde porteuse de haute fréquence ?
19. Pourquoi un bruit blanc présentant une fréquence maximale de coupure est-il qualifié de bruit
rose ?
20. On dit qu'informer c'est surprendre. Pourquoi ?
•a
o
c
a
Û
(N
o
fM
(5)
-C1
.S
's>O.
O
(J
Introduction expérimentale
oscilloscopes et multimètres
La réalisation expérimentale des montages présentés dans cet ouvrage nécessite l'usage d'instruments de contrôle des signaux, tels que les oscilloscopes et les multimètres. Aussi, dans une introduction
expérimentale préalable, proposons-nous de décrire sommairement le fonctionnement de ces appareils
de mesure. Il convient avant tout de préciser le concept de signal.
I, — SIGNAUX
En électronique, un signal est une tension ou un courant qui peuvent soit transporter une information, par exemple audio, d'horloge ou de commande d'un système, soit ne pas en véhiculer, comme
c'est le cas pour les tensions d'alimentation ou de polarisation.
On distingue deux types de signaux issus de deux technologies distinctes : le premier type est
analogique et le second numérique ou digital. Un signal est analogique si sa variation temporelle
est continue ; c'est le cas de signaux provenant de capteurs physiques. Il est numérique s'il varie entre
plusieurs niveaux discrets.
o
c
On classe habituellement les signaux, selon leur « forme » au cours du temps. Ainsi, les signaux
stationnaires ont une valeur qui n'évolue pas au cours du temps, par exemple la tension d'alimentation
fournie par une pile de 4,5 V , alors que les signaux variables varient au cours du temps, comme la
tension électrique efficace de 230 V fournie par le réseau électrique français ; ces derniers se classent
en deux catégories : les signaux périodiques et les signaux apériodiques.
1.1. — Signaux périodiques
Un signal périodique e{t) est caractérisé par sa période T et sa fréquence / définies selon :
(5)
4-J
e(t) = e(î + T)
>~
CL
O
U
et f = ]1
.
....
Le domaine de fréquence de 1 électronique est très étendu, de quelques mHz (10
Hz) à plusieurs
9
centaines de GHz ( 100 x 10 Hz). Le domaine des basses fréquences est défini par la validité de
l'approximation des régimes quasi-stationnaires (cf. Électromagnétisme) ; il s'étend jusqu'à la centaine
de MHz( 100 x 106 Hz).
Au-delà, la propagation des ondes électromagnétiques doit être prise en compte : c'est le domaine
des hyperfréquences.
xxviii
Oscilloscopes et multimètres
On reconnaît la caractéristique fondamentale des signaux périodiques par la forme de leur spectre
de Fourier qui est constitué de pics régulièrement distribués (cf. annexe 2).
a) Signaux harmoniques ou sinusoïdaux
Un signal harmonique ou sinusoïdal a pour expression :
e(t) = em cos{W + </») = em cos(27r/r + <$>)
dans laquelle em est l'amplitude, (f) la phase à l'origine des temps, (o la pulsation et / la fréquence.
Ces signaux sont fondamentaux en électronique, et plus généralement en physique, car ils permettent
d'exprimer un signal réel , périodique ou non, sous la forme d'une somme discrète ou continue de
signaux hannoniques (cf. annexe 2).
b) Signaux symétriques
Un signal est symétrique si :
e{t) = -e ^-0
c'est-à-dire que l'alternance positive a la même forme que l'alternance négative (Fig. 1).
<0
T
Fig. I.
La valeur moyenne dans le temps d'un signal symétrique sur une période est nulle. En effet, on a, en
surlignant la grandeur considérée pour désigner sa moyenne temporelle :
e(t)
= i
'
e(t)it=i
j^- e{t)it+1
i
rT/2
e{t)dt=11
dt = 0
e(t) + e{t+'^
puisque e(t + T/T) = e(t — T/2) = —e(t).
Un signal symétrique n'admet pas d'harmonique pair. Montons-le en calculant les coefficients de
Fourier C2n (cf. annexe 2) :
*-2/i
rp
? L
i ^
exp
(~"/27r^)
dr
e{t) exp 0y27r^^ dt + ^ ^ ^e{t) exp
d,
En posant t' = t — Tf2, cette dernière intégrale devient :
1
rT'2
T l
e\f
+
T
-
1
( . ^ -j2mr\
o
a dr
J / = -exp \-j2it—
puisque e(t' + T/2) = —e{t'). On en déduit C2n = 0 .
r'2 e{t ) exp \-]2ir—\
( -^ 2'"'\.,
dr
xxix
Oscilloscopes et multimètres
c) Signaux dé formés canoniques
Les générateurs de signaux, dont font partie les Générateurs Basse Fréquence (GBF en abrégé),
permettent de produire des signaux sinusoïdaux, mais aussi des signaux symétriques de forme canonique, carrée eu [t] et triangulaire e& (t), dont la décomposition en série de Fourier donne respectivement (cf. annexe 2), en désignant par ecc la valeur crête à crête des signaux :
..
si n( ■7r7r/2)
/
nt\
eu{t) = eccY,
,2
cos(2^-j
;i=I
et
..
^
v^l—cos(7rnj
/
nt\
eA{t) = 2gtT ^
coS (2^-]
7i—1
^
^
d) Rapport cyclique
Si tp et t„ sont respectivement la durée de l'alternance positive et celle de l'alternance négative
d'un signal périodique, de période T, les rapports cycliques à « l'état haut » aj-, et à « l'état bas » ai,,
sont respectivement les facteurs suivants :
T
ai, — -jt
et
T
<*b = jr
avec
tp -y t,, — T
et donc
ap -y a,, — l
On les exprime souvent en pourcentage.
Exemple : un signal créneau, délivré par un GBF, de fréquence 50 Hz, est positif pendant 5 ms
au cours d'une période ; le rapport cyclique du signal relativement à l'état haut vaut donc ;
a/, — ~~
=
Tpf = 5 x lO-3 x 50 = 0,25
ou
25%
1.2. — Signaux apériodiques
Un signal est apériodique, c'est-à-dire non périodique, si son spectre de Fourier est continu (cf.
annexe 2). Les signaux aléatoires et le bruit (cf. chapitre 17), ainsi que les signaux chaotiques (cf.
annexe 6), sont des exemples de signaux apériodiques.
Notons que tout signal réel est apériodique, puisque limité dans le temps. Néanmoins, un signal
limité dans le temps, mais constitué d'une succession périodique de motifs identiques en assez grand
nombre, peut être considéré comme périodique avec une excellente approximation (cf. annexe 2).
•a
o
fM
II. — L'OSCILLOSCOPE
L'oscilloscope est un instrument qui fut inventé en 1897 par le physicien allemand K. Braun, ce
qui lui valut le prix Nobel en 1909. On le considère comme l'ancêtre des téléviseurs construits dans les
années 1920 et 1930.
II. 1. — Oscilloscopes analogiques et oscilloscopes numériques
-C
Avec cet instrument, on visualise l'évolution temporelle d'une ou plusieurs tensions dans un circuit,
la forme de ces signaux. Aussi est-il souvent appelé « l'œil » de l'électronicien.
Les oscilloscopes couramment utilisés sont principalement de deux types.
i) Les oscilloscopes analogiques
Les oscilloscopes analogiques possèdent une source, la cathode, qui émet des électrons, soit par
effet thermo-électronique en raison de sa température, soit par effet de champ (cf. Quantique). Les
électrons sont accélérés dans un tube à vide vers une anode trouée portée à une haute tension de l'ordre
de 30 kV . L'impact sur un écran photo-luminescent forme un point lumineux ou spot (point en anglais).
XXX
Oscilloscopes et multimètres
Deux séries de deux plaques parallèles, l'une portée à une tension proportionnelle à la tension à visualiser, l'autre orthogonale à la première série, soumise à une tension en dents de scie et proportionnelle au temps, provoquent la déviation du faisceau électronique et donc l'apparition d'une trace sur
l'écran d'observation.
La durée mise par les électrons pour atteindre le détecteur étant négligeable (de l'ordre de 10 ns ),
le signal est visualisé pratiquement en temps réel sur l'écran. Les oscilloscopes analogiques sont encombrants et lourds, en raison du tube à vide et de l'alimentation du canon à électrons.
ii) les oscilloscopes numériques.
Dans les oscilloscopes numériques, on échantillonne la tension à visualiser, c'est-à-dire qu'on ne
considère qu'un ensemble de valeurs discrètes régulièrement réparties au cours du temps. Ce n'est
qu'après cette opération que le signal est affiché sur un écran, ou moniteur, dont la technologie s'apparente à celle des ordinateurs portables actuels ; le signal est donc visualisé en temps différé. Les oscilloscopes numériques se distinguent des analogiques par un encombrement et un poids moindre, car
ils utilisent largement les possibilités de miniaturisation des composants ; avec ce type d'oscilloscope,
on a aisément accès aux caractéristiques principales du signal : fréquence, période, valeur efficace, valeur moyenne ou valeur de crête, etc.
Malgré des différences technologiques importantes, les fonctions les plus courantes sont communes
aux deux types d'oscilloscope. Dans la suite, on approfondit l'analyse sur un exemple de façade d'oscilloscope « standard », (Fig. 2), ce qui facilite leur utilisation dans les divers montages.
14
13
8
9
Y
16
ç>
□/
11
EXT.
NORMAL
/AUTOY.
pos. I
12
15
v
8 :yii
0-
5
GND AC-DC
□ □
O Yll
4
s
GND AC-DC
□ □
CeO Yl
Test
composant
□
20
21
4 3 1 5
CH.I/II DUAL CHO
□ □ □
7 6 10 17 18
19
3
2
Fig. 2.
II. 2, — Branchement de Poscilloscope
a) Masse de Voscilloscope
La plupart des oscilloscopes possèdent deux entrées ou voies que l'on désigne par les lettres Y\
et Y2 (points 1 et 2 de la figure 2). Ces voies ont une borne commune, la masse (point 3), ou tension
de référence, généralement reliée à la prise de terre de l'instrument. Le branchement de la masse de
l'oscilloscope dans le circuit doit obéir à quelques règles essentielles.
xxxi
Oscilloscopes et multimètres
i) Si la masse d'un autre appareil utilisé dans le montage, par exemple un GBF, est par construction
reliée à la terre, le choix du point de masse est contraint. Il est alors nécessaire de relier la masse de
l'oscilloscope à la masse de l'autre appareil. Si cette précaution n'est pas prise, la liaison commune par
la prise de terre provoquerait un court-circuit, c'est-à-dire la mise au même potentiel de deux points
différents du circuit.
ii) Si au contraire, la masse est flottante, c'est-à-dire non reliée à la prise de terre, la masse de
l'oscilloscope peut être choisie librement en n'importe quel point du circuit.
b) L'entrée du signal
Sauf réglage spécifique, les impédances d'entrée de l'oscilloscope sont élevées ; aussi, l'application
d'une tension sur les voies Y\ et Y2 perturbe-t-elle peu le système. Un oscilloscope se branche donc
en parallèle dans un circuit. Chaque entrée est couplée (point 4 sur la figure 2) à la chaîne de traitement
interne de l'oscilloscope, selon le schéma de la figure 3. On distingue trois possibilités.
i) Le couplage DC, de l'anglais Direct Current (courant direct), est le couplage « standard » à
utiliser par défaut. La tension du circuit est directement transmise, sans traitement.
ii) La position GND, de l'anglais Ground (terre), permet d'appliquer une tension nulle sur la voie
sans débrancher aucun fil, afin par exemple de centrer verticalement l'origine des tensions en agissant
sur le curseur (5).
ni) Le couplage AC, de l'anglais Alternative Current (courant alternatif), supprime toute composante stationnaire du signal d'entrée, par un filtre passe-haut du premier ordre, dont la fréquence de
coupure est de quelques hertz (cf. chapitre 6). Ce couplage est à utiliser lorsque la composante stationnaire d'un signal gêne sa visualisation. Citons par exemple la mesure du déphasage temporel entre deux
signaux synchrones dont l'un est décalé en tension, ou encore la visualisation de parasites sur un signal stationnaire d'alimentation. Le couplage AC permet alors de mieux repérer le passage par l'origine de la tension décalée. Attention néanmoins à ne pas l'utiliser à trop basse fréquence, car le filtre
peut modifier la forme des signaux.
DC
Signal d'entrée
appliqué à
l'oscilloscope
0,1 (jlF
AC
• CM)
1 MÛ
10 pF
Fro. 3.
II. 3. — Mode balayage temporel
Un oscilloscope est capable d'afficher des signaux variables jusqu'à des fréquences de plusieurs
dizaines de MHz. Le coût de l'instrument est d'ailleurs directement lié à l'étendue de sa bande passante.
En mode balayage, l'axe horizontal est celui du temps et l'axe vertical celui des tensions à étudier.
a) Sensibilité verticale
Avec le sélecteur de calibre (6), on règle l'échelle verticale des tensions. Sur certains oscilloscopes
munis d'un réglage fin (7), on peut supprimer manuellement le « calibrage » de cette échelle et donc
ajuster l'amplitude d'une courbe sur l'écran. Il est alors possible de mesurer :
i) une durée de montée, c'est-à-dire la durée nécessaire pour atteindre, en régime transitoire, une
fraction déterminée de la tension établie,
xxxii
Oscilloscopes et multimètres
ii) une fréquence de coupure en recherchant la fréquence pour laquelle l'amplitude de la courbe est
réduite dans le rapport 7/5 = 1,4 « s/2 , dans la pratique de sept carreaux dans la bande passante à
cinq carreaux à la coupure.
b) Base de temps
Le sélecteur de calibre (8) permet de régler l'échelle horizontale temporelle, ou base de temps.
Comme précédemment, sur certains oscilloscopes dotés d'un réglage fin (9), on supprime le calibrage
de cette échelle, ce qui permet par exemple de mesurer, en mode bicourbe, le déphasage entre deux
signaux synchrones : on ajuste la période à l'écran du signal de référence sur neuf carreaux ; chaque
carreau de retard ou d'avance du signal déphasé correspond alors à 360/9 = 40° soit 0,7 rad.
c) Synchronisation
Le but de la synchronisation est d'afficher un signal stable sur l'écran de l'oscilloscope. Elle est
essentielle pour observer confortablement un signal, car une mauvaise synchronisation provoque un
déplacement plus ou moins lent du signal sur l'écran, appelé dérive. En effet, si les tensions en début et
en fin de balayage diffèrent, deux traces consécutives ne se superposeront pas ; le signal dérive.
Il existe plusieurs modes de synchronisation.
i) Mode normal (15) : la représentation temporelle d'une tension sur l'écran d'un oscilloscope est
celle donnée sur la figure 4. Une fois fixé un critère de déclenchement du balayage du spot, par exemple
le dépassement d'un niveau de tension réglable (16), une première trace se forme à laquelle succède une
durée d'attente, jusqu'à un autre déclenchement ; une nouvelle trace apparaît, et ainsi de suite.
ii) Mode automatique (15) : dans ce mode, un déclenchement forcé permet de visualiser le signal,
même si le critère de déclenchement n'est pas réalisé.
iii) Mode monocoup : sur les oscilloscopes numériques, le mode de balayage monocoup produit,
après son déclenchement et une fois l'instrument armé, une trace unique ; on l'utilise notamment pour
observer un régime transitoire (cf. chapitre 4).
uit)*
l
lère trace
1
1
1
1
1
/~\
/ \
Niveau de
déclenchement
0
2ème trace
s~\
/ \
\\ 11
//
/
V
\\
\
\y /
Écran
l\y /
1
1
1
//"\\
//
/
1
(
1
1
1
//~\\
/
1
\\
\\ 1
//
//
\
/
V
/ *"
î
\
/
\
/
\y /
\
' y /
1
Écran
1
1
FIG. 4.
d) Signal de déclenchement
Dans l'exemple précédent, le signal de déclenchement choisi était le signal affiché lui-même, c'està-dire l'une ou l'autre des voies internes Y\ ou Y2 (choisie à l'aide du bouton 10). Il est possible
d'utiliser un signal externe pour déclencher le balayage du spot de l'oscilloscope (point 11) sur l'entrée
spécifique (12) ; on peut même choisir la tension délivrée par le « secteur 50 Hz » (13) pour des signaux
synchronisés sur le réseau électrique.
xxxiii
Oscilloscopes et multimètres
Sur certains oscilloscopes, il existe un mode de déclenchement alterné, pour lequel les signaux des
voies
et Yj sont alternativement affichés. Ce mode est particulièrement adapté à la visualisation de
deux signaux de fréquences différentes. En revanche, si les signaux à visualiser sont synchrones, leur
déphasage temporel n'est plus apparent, les signaux semblent être en phase.
Le signal choisi est alors couplé à l'étage de déclenchement, appelé déclencheur ou trigger (gâchette en anglais), selon les modes (14) :
i) DC pour Direct Couplage, c'est-à-dire sans traitement,
ii) AC pour Alternative Current grâce à la suppression de la composante stationnaire du signal,
iii) LF pour Couplage après Filtrage des « basses » fréquences {low frequencies), inférieures
à 50 kHz,
iv) H F couplage après filtrage des «hautes » fréquences {high frequencies), supérieures à 50 kHz.
e) Mode bicourbe
En mode bicourbe (17), on affiche simultanément les deux tensions sur les voies Fi et Y2 à
l'écran. Sur les oscilloscopes analogiques, on distingue deux modes d'affichage :
i) Le mode alterné, Alternate, ou mode par défaut, exhibe, à tour de rôle, l'une puis l'autre voie.
En raison de la persistance des impressions lumineuses sur la rétine, ce mode est adapté aux fréquences
élevées. En effet, aux vitesses de balayage importantes, l'alternance rapide des deux courbes produit
une impression de simultanéité.
ii) En mode découpé, Chop (hache en anglais), on divise la durée de balayage en petits intervalles
temporels que l'on utilise pour afficher, à tour de rôle, l'une puis l'autre voie (18). On visualise ainsi
simultanément les deux signaux basse fréquence.
II. 4. — Mode XY ou mode Lissajous
En mode XY (point 19 de la figure 2), ou mode Lissajous, du nom du physicien français
J. Lissajous, la voie Y\ est envoyée sur l'axe des ^ et la voie Yj sur l'axe des y. Ce mode est parfois utilisé pour déterminer le déphasage entre deux tensions synchrones sinusoïdales, par exemple :
U] (t) = Uijn COS(&)/j
et
Uof) = «2,»; COs{ù}t + (g)
Éliminons le temps entre ces deux signaux :
—— = cos(W A- (p) = cos(W) cos cp — sin(ca/j sin cp =
cos ip — j 1
UOjn
MI. m
\
d'où:
«2
«1
V
11
cos (p I =11
\,m
J
\
u
u
2,m
"l \ • 2
sin ip
l,/n /
W
Il vient en effectuant :
/ Ml \
1
\tl\,}nj
+
/ M2 \
1
V^2,m )
_ Ml M2
. 2
—2
cos q? = sm (p
M],m ^2,111
Plusieurs cas se présentent.
i) Lorsque
= 0 ou n rad, la courbe décrite par le spot en mode XY est une droite passant par
l'origine du repère. En effet :
M2
M]
"2,m
"1, fi
= 0
soit
«2
_
±
M|
xxxiv
Oscilloscopes et multimètres
ii) Lorsque (p = tt/I rad ou —tt/I rad, la courbe est une ellipse dont les axes sont parallèles aux
axes de coordonnées puisque :
U\
ll
Ul
+
\,n
= 1
M2,n
iii) Pour toute autre valeur de (p, c'est une ellipse dont les axes sont inclinés par rapport aux axes
( u\, 112 ) du repère. On obtient le déphasage cp dans l'intervalle ] — tt rad, tt rad[ en mesurant sur le
graphe le rapport NN'/MM' (Fig. 5). En effet, MM' = 2ii2,m et NN' = 2u2>m \ sin^j, ce que l'on
obtient en faisant u\ = 0 dans l'équation de l'ellipse :
sin^c =
NN'
Nu 2,M
MM'
NU2.0
Si le grand axe de l'ellipse se trouve dans le premier quadrant du système de coordonnées, alors
0 < |^| < -71/2 rad ; sinon, 7r/2 rad < |^| < tt rad.
Le signe de (p dépend du sens de parcours du spot sur l'ellipse. On le détermine en introduisant
l'angle polaire $ défini par :
„ _ «2(0 _ «2,m COS(W+ (p)
f
tan a — —— —
—-—
U\v)
«l,m CO^[Cùt)
et en calculant sa dérivée temporelle 0 :
d{] + tan 9)
U2,m m[— sm(cot + ç) cos{û)t) + cos(w/ + ç) sin(«yf)]
Ml,
COS2{(Ot)
— ù)
sm cp
«2,
u\,m cos2((yt)
Si e > 0, l'ellipse est parcourue dans le sens direct, ce qui correspond à sin ^ < 0. Si ^ > 0, elle est
parcourue dans le sens indirect ou rétrograde.
nU2
M
N
U]
*
N'
M'
Fie. 5.
II. 5. — Mode Test Composant
Si l'action des curseurs de centrage verticaux ne produit aucun effet, c'est probablement en raison de l'activation du mode Test Composant (point 20 de la figure 2). Ce mode permet de visualiser
la caractéristique d'un dipôle, par exemple une diode, une résistance ou un condensateur, afin de vérifier son bon fonctionnement. Le dipôle se branche directement sur l'entrée spécifique (21), laquelle se
comporte comme un générateur de courant alternatif, de fréquence 50 Hz . La tension aux bornes du dipôle à tester est mesurée et portée en abscisse, alors qu'une tension proportionnelle à l'intensité du
courant délivré est représentée en ordonnée, afin d'afficher la caractéristique du dipôle.
XXXV
Oscilloscopes et multimètres
Un condensateur donne une courbe elliptique d'axes horizontaux et verticaux, un résister, une
droite passant par l'origine, etc.
Remarque : L'absence de dipôle produit à l'écran une trace horizontale caractéristique d'un conducteur
ohmique de résistance infinie.
III. — LES MULTIMÈTRES
Les multimètres sont des appareils de mesure regroupant plusieurs instruments au sein d'un seul
boîtier. Ils assurent de nombreuses fonctions dont la mesure de tensions, d'intensités de courant et
d'impédances ; les plus perfectionnés pennettent aussi de mesurer des températures, des fréquences et
de contrôler le bon fonctionnement de composants électroniques tels que les diodes ou les transistors.
Si la technologie analogique subsiste encore dans certaines applications, par exemple pour réaliser
des vue-mètres ou petits cadrans à aiguille, la technologie numérique s'est imposée au cours de la
dernière décennie. Moins fragiles et peu coûteux, les multimètres numériques peuvent aujourd'hui être
connectés à un ordinateur en vue d'un traitement informatisé des résultats de mesure. Dans la suite, nous
utiliserons le multimètre numérique Metrix MX54 (Fig. 6).
TfPÎïSiy
MX54
BAT AUTO REL MIN MAX AVG MEM AC+DC
1.
O,UQ0ia,::.M
A-fjS ^ UNE Q ^ SB "N- AU
RS?32
ZOOM
TRMS
SEt/ON ZOOM
Hz
SURV
PRINT RANGE REL
Q
PK +/- HOLD
IPÔ77
AC
DC ii.A mA
OFF
DC
A
MO"
CAT JI IOOOV_L
A .
V ft -H- -►(- COM
mv AC
DC
dB
AC+D
ASY
M-A mAFuSFn A
FIG. 6.
xxxvi
Oscilloscopes et multimètres
III. I. — Sélecteur de fonctions et calibres
a) Sélecteur de fonctions
En façade de l'instrument, un sélecteur permet de choisir la fonction désirée (Fig. 6) :
i) voltmètre stationnaire (point 1), entrées COM et V
ii) millivoltmètre stationnaire (2), entrées COM et V
iii) voltmètre alternatif (3), entrées COM etV
iv) milliampèremètre stationnaire (4), entrées COM et rnA
v) ampèremètre stationnaire (5), entrées COM et 10 A
vi) ohmmètre (6), entrées COM et fl.
b) Calibres
Un calibre est une échelle qui fixe un intervalle de mesure. De plus en plus d'instruments sélectionnent automatiquement le calibre le plus approprié à la mesure, même s'il reste toujours la possibilité de choisir manuellement un calibre spécifique. Selon le modèle de multimètre, le choix manuel se
fait en agissant sur un sélecteur ou par un bouton-poussoir qui provoque le défilement des différents calibres.
III. 2. — Mise en oeuvre
Un ampèremètre, d'impédance faible, s'insère en série dans un circuit dont on veut mesurer l'intensité du courant qui le parcourt. En revanche, un voltmètre, qui présente une grande impédance, se
branche en dérivation, entre deux points du circuit.
L'impédance d'entrée d'un multimètre numérique dépend du calibre de mesure. Par exemple, sur
le calibre « 5 V continu », la notice de l'instrument indique une résistance interne de 11 Mfi.
On mesure une résistance à Vohmmètre en connectant directement les bornes du résistor à celles
de l'instrument.
Remarque : Si le résistor est connecté dans un circuit, il faut au préalable l'en extraire, sinon la résistance mesurée serait celle de l'ensemble du circuit aux bornes du résistor.
III. 3. — Affichage et précision
a) Affichage
Le cadran d'un multimètre numérique comporte des chiffres appelés digits. Chaque digit prend une
valeur entière comprise entre 0 et 9. Ainsi, un affichage sur 3 digits donne un nombre compris entre
0 et 999.
Actuellement, la plupart des multimètres disposent d'un digit supplémentaire capable de prendre
les valeurs 0 ou 1. Aussi, le digit supplémentaire est-il compté pour « I/2 » dans le nombre total de
digits. Par exemple, un afficheur 3 digits et 1 /2 peut donner tous les nombres entiers compris entre 0
et 1999.
Notons que le signe des grandeurs affichées ainsi que la virgule flottante, dont la position varie en
fonction du calibre sélectionné, font l'objet d'un affichage séparé.
xxxvii
Oscilloscopes et multimètres
b) Précision
Dans les notices techniques, la précision, c'est-à-dire l'incertitude e commise sur la lecture de
l'intensité d'un courant par exemple, est mise sous la forme :
e=xL
nD = xUi + nUd
où L désigne la valeur pleine échelle, c'est-à-dire la tension maximale U/ susceptible d'être affichée
par l'appareil, et D la valeur Uj de la plus petite unité affichable, ou digit de poids faible ; j s'exprime
en pourcentage et n est un entier.
Exemple : l'incertitude 0,6% L + 30 D que l'on commet sur la lecture de l'intensité d'un courant
alternatif, de valeur 2 mA , sur le calibre 50 mA , où 1 digit représente 1 pA, se calcule selon :
e= ^
x
50 + 30 x 10-3 = 0,33 mA
La même mesure, sur le calibre 2 mA , serait affectée d'une incertitude de :
6 = 5^ x 2 + 30 x 10~3 = 0,04 mA
Il est ainsi préférable de sélectionner le calibre le plus petit compatible avec la grandeur à mesurer.
m. 4. — Bande passante
La bande passante d'un multimètre numérique dépend de la fonction choisie et du calibre. Par
exemple, sur le calibre 5 V alternatif, la notice de l'instrument indique une précision sur la bande
passante qui est comprise entre 10 et 30 kHz : 1%, L + 30 D.
III. 5. — Mesure de tensions efficaces
On définit la valeur moyenne Um et la valeur efficace U ou Uef d'une tension variable périodique,
de période T, par :
1 fT
Um = u{T) = -J^ u(t)dt
et
r.
.-i 1/2
\l fT ,
1
2
Uef = ^ (/)J
= u (/) d t
l//2
En séparant la tension «(r) en deux composantes, l'une stationnaire Um , et l'autre alternative de
valeur moyenne nulle ucl(t), on obtient les relations suivantes ;
u(t) = U,„ +
Uef — {[Um + M«W]2}
—
avec
Uh + 2Umua(t) + ul{t)
ua{t) = 0
—
u}n + u2a(t)
- (u}n + ulef)
1
Uthef désignant la valeur efficace de la tension ua(t).
a) Voltmètre TRMS
Un voltmètre TRMS, de l'anglais True Root Mean Square pour vraie racine de la moyenne du
carré, est un voltmètre capable de fournir la valeur efficace Uef de n'importe quel signal périodique
u{t) . Le sélecteur doit être placé sur V^c+dc (points 1 ou 2 de la figure 6) et la fonction TRMS activée
par pression (7).
xxxviii
Oscilloscopes et multimètres
b) Voltmètre RM S
Un voltmètre RMS, de l'anglais Root Mean Square pour racine de la moyenne du carré, est un
voltmètre qui fournit la tension efficace du signal, une fois ôtée la composante stationnaire. Un voltmètre
RMS fournit donc la valeur efficace U(hef de la composante alternative iia{î) .
c) Voltmètre non RMS
En mode alternatif, un voltmètre bas de gamme ne peut pas fournir la valeur efficace d'une tension
non sinusoïdale. Il donne la tension de crête Uc et affiche la valeur Uc/\/2. Cette dernière valeur
correspondrait à un signal sinusoïdal, puisque, si u{t) = um cos(«yr), alors :
1/2
2
Uef = U {1)
=
r 1 f-T
-1 t/2
^
W COs2 W d?
fj
m
( 0
= ^|
car
^
COS {û)t) = 2
III. 6. — Mesure d'intensités de courants efficaces
La technique de mesure des tensions efficaces se transpose à celle des intensités des courants efficaces. Ainsi, un ampèremètre TRMS fournit directement îej , tandis qu'un ampèremètre RMS donne
hi,ef •
•a
o
c
rs
Û
(M
,H
O
(N
(5)
A-)
JZ
.çn
"s_
>■
Q.
O
(J
Lois de base des circuits
en régime stationnaire
La science des circuits électriques est une science jeune qui s'appuie fondamentalement sur les lois
de l'électromagnétisme de Maxwell. La résolution d'un circuit quelconque, c'est-à-dire la détermination
des courants qui parcourent les fils de connexion et celle des tensions entre deux points quelconques du
circuit, date de 1845, avec la contribution majeure du physicien allemand G. Kirchhoff, alors âgé de
seulement 20 ans.
Les lois qu'il a énoncées sont à la base de deux domaines importants, proches de l'électromagnétisme, sinon inclus :
i) l'électrocinétique, ou science des réseaux électriques, dans laquelle on s'intéresse particulièrement au transport de la puissance électrique dans les fils conducteurs, entre les sources et la zone
d'utilisation (Fig. Lia);
Source de
puissance
électrique
+1
R
a
Charge
Rr
-L
Entrée
Sortie
b)
a)
Fig. 1.1.
ii) l'électronique, ou science des systèmes, laquelle traite des signaux qui contiennent une information (Fig. 1.1b). On exclut ici l'analyse des lois constitutives, telles que la loi d'Ohm dans les matériaux conducteurs (cf. Electromagnétismé), ainsi que la physique des composants, essentiellement celle
des semi-conducteurs, laquelle exige le cadre de la théorie quantique (cf. Qiiantique).
Dans ce chapitre, nous présentons les lois de Kirchhoff en nous limitant au régime stationnaire, dit
aussi continu, pour lequel les tensions et les intensités des courants sont indépendantes du temps.
L'étude des circuits en régime stationnaire est essentielle pour plusieurs raisons ; d'abord, elle est
plus simple qu'en régime variable ; ensuite elle se généralise facilement aux régimes sinusoïdaux, et
surtout elle constitue une étape incontournable car tous les circuits, y compris ceux destinés aux signaux variables, comportent des piles et alimentations stationnaires dont la fonction est notamment
2
1. Lois de base des circuits en régime stationnaire
l'apport de puissance aux composants actifs tels que les amplificateurs opérationnels ou les transistors. Enfin, les lois de Kirchhoff sont encore valables en régime variable, pourvu que cette variation ne soit pas trop rapide et satisfasse à l'approximation des régimes quasi stationnaires (cf. chapitre 2).
I. _ DIPOLES EN REGIME STATIONNAIRE
1,1. — Définition
On appelle dipôle électrociné tique, un système accessible par deux bornes A et B, d'où son nom,
et caractérisé par deux seules grandeurs : l'intensité / = Fab du courant qui le traverse, et la tension
U = Uab ou différence de potentiel, entre ses bornes.
Rappelons que / s'exprime en ampère et se mesure à l'aide d'un ampèremètre ; U s'exprime en
volt et se mesure grâce à un voltmètre (Fig. 1.2).
La nature de la correspondance entre l'intensité du courant qui traverse un dipôle et la tension à
ses bornes caractérise ce dipôle. Plusieurs dipôles dont les bornes sont connectées, de telle sorte que
l'ensemble forme une ou plusieurs boucles ou mailles, constitue un circuit électrique et plus largement
un réseau électrique (Fig. 1.3).
Dipôle 1
/l
Dipôle
B
Dipôle 2
1 = 1AB
Dipôle 3
Dipôle 5
Dipôle 4
U = Uab
FIG. 1.2.
FlG. 1.3.
1.2. — Le dipôle considéré comme un système
En physique, un système est un dispositif capable de faire correspondre, à une grandeur physique,
dite d'entrée, une autre grandeur physique, dite de sortie. On le caractérise par un opérateur S transformant la grandeur d'entrée e en la grandeur de sortie s :
^ — é>{e}
Dans ce contexte, un dipôle est le système qui fait correspondre / à f/ et vice-versa. L'intérêt essentiel
de ce point de vue est qu'il n'est pas nécessaire de connaître la constitution interne du composant ;
la simple connaissance de la règle de correspondance entre l'entrée et la sortie suffit. En outre, une
telle analyse est indépendante de l'évolution des technologies, puisqu'elle s'appuie sur la seule relation
fonctionnelle.
1.3. — Puissance électrique reçue par un dipôle en régime stationnaire
La puissance électrique que peut dissiper un dipôle est un paramètre important de son fonctionnement, puisque sa prise en compte permet d'éviter sa détérioration, voire sa destruction. En outre, la
plupart des appareils domestiques sont choisis en fonction de la puissance qu'ils consomment; rappelons les ordres de grandeur des puissances consommées par quelques dipôles connus, respectivement une lampe de poche à incandescence, un téléviseur, une batterie de véhicule au démarrage et une
Lois de base des circuits en régime sîationnaire
3
bouilloire électrique :
Vlampe ~ 0, 9 W
Vtv ~ 100 W
Vbatterie ~ 1 kW
et
VhouiUoire ~ 2 kW
La puissance électrique reçue par un dipôle électrocinétique AB, parcouru par un courant d'intensité
/ = Iab , mesurée dans le sens A vers B, aux bornes duquel la tension est Uab = La — Vg , Va et Vb
étant les potentiels pris à partir d'une référence commune, a pour expression (cf. Électromagnétisme) :
V = UabÉB — UI
En effet, le courant /, algébrique, correspond à un déplacement de charges. Pendant la durée élémentaire
d ?, la charge d ^ = / d r, pénètre en A dans le dipôle. Elle reçoit, lors de sa traversée de A vers B, le
travail 5W = {VA — VB)dq, soit la puissance V = <5W/ dî = UI.
Le choix adopté ci-dessus, qui consiste à travailler avec la tension Uab & l'intensité Iab , est
appelé convention récepteur, puisque Uab et Iab sont de même signe pour un dipôle recevant de la
puissance.
D'après ce qui précède, la puissance fournie par le dipôle est l'opposée de celle qu'il reçoit :
Vu = -V = -UabIab
soit aussi
Vll = UABIBA
Lorsqu'on écrit la puissance sous cette dernière forme, on dit que l'on s'est placé en convention générateur. Effectivement, la puissance reçue par un générateur électrique est négative puisque la vocation
de ce dernier est de fournir de la puissance électrique au circuit.
Par exemple, pour une lampe de poche, alimentée par une pile de force électromotrice £ = 4,5 V
et traversée par un courant d'intensité / = 0,20 A , la puissance que fournit la pile au circuit extérieur
est (Fig. 1.4) :
■p,, = £7 = 4,5 x 0. 2 = 0,90 W
Lampe
de poche
Fig. 1.4.
1.4. — Caractéristique d'un dipôle
a) Définition
Expérimentalement, on constate généralement que l'on ne peut imposer qu'une seule des deux
grandeurs, U on I. La relation entre elles, généralement écrite sous la forme I{ U), définit sa caractéristique.
Pour être précise, cette caractéristique doit être accompagnée de la convention choisie. Cette précision sera ici superflue, car, sauf indication contraire, nous adopterons systématiquement, comme en
thermodynamique par exemple, la convention récepteur, c'est-à-dire que U désignera la tension Uab
et I l'intensité du courant Iab ■
4
1. Lois de base des circuits en régime stationnaire
b) Point de fonctionnement
La caractéristique d'un dipôle représente l'ensemble des états électriques possibles du dipôle. Cependant, l'une des deux grandeurs, I ou U, est imposée par les conditions d'utilisation, ce qui fixe
l'autre. Le point correspondant sur la caractéristique est appelé point de fonctionnement. Il arrive souvent que l'on fasse varier la tension ou l'intensité du courant autour d'une certaine valeur; le point de
fonctionnement varie alors sur la caractéristique, dans le voisinage d'un point de fonctionnement moyen.
c) Obtention des caractéristiques
Il existe deux montages simples qui permettent de déterminer expérimentalement la caractéristique
d'un dipôle, à l'aide d'un ampèremètre et d'un voltmètre.
Dans le premier, dit de courte dérivation, on mesure la tension aux bornes du dipôle, à l'aide d'un
voltmètre, et l'intensité du courant qui traverse l'ensemble dipôle et voltmètre, grâce à un ampèremètre
(Fig. 1.5a). Dans le second, dit de longue dérivation, le voltmètre donne la tension aux bornes du dipôle
et de l'ampèremètre, alors que l'ampèremètre fournit l'intensité du courant qui traverse le seul dipôle
(Fig. 1.5b).
Dipôle
Dipôle
A
A
I
V
V
U
U
R
R
b)
a)
Fig. 1.5.
Les deux schémas permettent de comprendre ces deux dénominations : dans le premier cas la dérivation comportant le voltmètre est plus courte que dans le second. On trace point par point la caractéristique I{U} en faisant varier la tension délivrée par le générateur.
Comme les instruments de mesure ne sont pas parfaits, les deux montages ne sont pas équivalents :
l'ampèremètre introduit une résistance RA , qui est faible devant toutes les autres, le voltmètre une
résistance Ry au contraire grande comparée à toutes les autres. Cette imperfection fausse évidemment
le relevé de la caractéristique, mais un choix judicieux du type de montage permet de minimiser cette
erreur expérimentale systématique. Ainsi, le montage courte dérivation sera choisi lors du relevé de la
caractéristique d'un composant de faible résistance interne, afin que le courant traversant le voltmètre
soit négligeable devant celui traversant le dipôle étudié. De même, pour un dipôle de forte résistance
interne, le montage longue dérivation conduit à une chute de tension aux bornes de l'ampèremètre
négligeable devant la tension aux bornes du dipôle étudié (cf. Exercices).
Remarque : Évidemment, si les deux appareils de mesure sont parfaits, c'est-à-dire si la résistance
interne de l'ampèremètre est nulle et la résistance interne du voltmètre infinie, la tension
aux bornes de l'ampèremètre est nulle, ainsi que l'intensité du courant qui traverse le
voltmètre ; les deux montages sont alors équivalents.
Lois de base des circuits en régime staîionnaire
5
On rend automatique le relevé expérimental de la caractéristique à l'aide d'une interface d'acquisition reliée à un ordinateur, l'ensemble permettant d'assumer, à la fois le rôle du générateur et celui
d'un multimètre (Fig. 1.6). Un logiciel de pilotage permet de paramétrer l'interface afin de déterminer la forme du signal à envoyer sur le circuit électrique, ici une rampe de tension, et d'enregistrer la
tension aux bornes du dipôle, ainsi qu'une tension proportionnelle au courant qui le traverse. Avec ce
même logiciel, on traite quelques centaines de points de mesure, ce qui permet de tracer la courbe I{U)
et de déterminer ses paramètres ; par exemple, la pente de la tangente à une courbe. La figure 1.7 représente la caractéristique d'une diode obtenue avec un montage muni d'un ordinateur, de son interface et
d'un logiciel de pilotage.
Sortie
□□□□ □ □□□ a □oon
1
*
Entrée 1 f
J? = 1 kfl
J
L
/
-,
RI
Dipôle
U
Entrée 2 1
Ordinateur
Interface
Fig. 1.6.
/(mA)
30
20
10
(A V)
0,5
0,7
FIG. 1.7.
1.5. — Propriétés d'un dipôle
a) Dipôle passif
Un dipôle, et plus généralement un composant de circuit électrique, est dit passif
n'échange de
l'énergie qu'avec le circuit auquel il est connecté (Fig. 1.8a). C'est le cas, par exemple, des résistors et
des diodes à jonction.
Par extension, on appelle circuit passif, un circuit uniquement constitué de dipôles passifs.
b) Dipôle actif
Un dipôle, et plus généralement un composant de circuit électronique, est actif s'il échange de
l'énergie avec le circuit et avec une source auxiliaire (Fig. 1.8b). C'est le cas des piles, alternateurs,
photodiodes, amplificateurs opérationnels et transistors par exemple. L'énergie de la source auxiliaire
peut donc être de nature diverse : chimique, mécanique, lumineuse, électrique, nucléaire, etc.
1. Lois de base des circuits en régime stationnaire
6
Dipôle passif
I Dipôle actif
I
-I-
Reste du
circuit
Source
auxiliaire
Reste du
circuit
b)
a)
Fig. 1.8.
La source auxiliaire d'un amplificateur opérationnel est son alimentation, laquelle n'est généralement pas représentée sur les schémas électriques. Pour un transistor, la source auxiliaire est la source de
polarisation, le plus souvent représentée sur les schémas électriques (cf. chapitre 7).
Par extension, on appelle circuit actif, un circuit comportant au moins un dipôle actif.
c) Dipôle récepteur
Un dipôle se comporte en récepteur lorsqu'il reçoit de la puissance du circuit. Le produit V = UI
est positif et il fonctionne donc dans les quadrants 1 ou 3 de sa caractéristique (Fig. 1.9). Par exemple,
un résistor, dont la caractéristique est entièrement contenue dans les quadrants 1 et 3 (Fig. 1.1 la), fonctionne toujours en récepteur.
I
U
"u
Zone générateur
Zone récepteur
2
1
0
U
3
4
Zone récepteur
Zone générateur
FIG. 1.9.
Zone récepteur
1
4
Zone récepteur
U
Zone générateur
FIG. 1.10.
d) Dipôle générateur
Un dipôle se comporte en générateur lorsqu'il fournit de la puissance au circuit. Le produit
V = UI étant négatif, son point de fonctionnement est situé dans les quadrants 2 ou 4 de sa caractéristique (Fig. 1.9).
Certains dipôles peuvent se comporter en récepteur ou en générateur, pouvant ainsi recevoir ou
fournir de la puissance électrique, d'où l'intérêt d'adopter une seule convention avec des valeurs algébriques.
Sur la figure 1.10, on a représenté la caractéristique d'une photodiode en indiquant ses différents
fonctionnements possibles. Dans les quadrants 1 et 3 , c'est un photorécepteur; dans le quadrant 4, la
photodiode se comporte comme un générateur électrique : c'est une photopile.
Dans ce même contexte, un dipôle actif peut dans certaines conditions se comporter en récepteur.
Ainsi, la batterie d'un véhicule est un générateur électrique au démarrage, mais se comporte en récepteur
Lois de base des circuits en régime sîationnaire
1
lorsqu'on la recharge, par l'intermédiaire de l'alternateur au cours du déplacement, ou d'un chargeur de
batterie, si le véhicule est au repos.
e) Dipôle linéaire en régime stationnaire
En régime stationnaire, un dipôle est linéaire si l'intensité du courant qui le traverse est proportionnelle à la tension à ses bornes ; sa caractéristique est donc une droite passant par l'origine. C'est le cas
d'un résistor (Fig. 1.1 la).
Précisons que les dipôles dont la caractéristique est rectiligne par morceaux, c'est-à-dire constituée
d'un ensemble de segments, ne possèdent pas cette propriété ; il en est ainsi pour un modèle simplifié de
diode (Fig. 1.11b). De même, les dipôles, tels que ceux dotés d'une force électromotrice, par exemple
les accumulateurs, ne sont pas linéaires, même si la relation /([/) est affine, c'est-à-dire même si la
caractéristique est une droite qui ne passe pas par l'origine (Fig. 1.1 le).
1'
/"
/
0
/
U
a)
b)
i-E
U
c)
FIG. l.U.
Remarque : Nous verrons ultérieurement pourquoi un circuit composé de dipôles linéaires et de générateurs à caractéristique affine peut se comporter comme un système linéaire (cf. chapitre 5).
f) Dipôle symétrique
Un dipôle est symétrique lorsque sa caractéristique 1(11) est une fonction impaire de U. Un tel
dipôle n'a pas de sens de branchement, puisque son retournement ne modifie pas son comportement :
changer U en —U conduit à changer I en —/. Il en est ainsi pour un résistor (Fig. 1.11a).
II. — DIFFÉRENTS TYPES DE DIPÔLES
Nous présentons ici les principaux types de dipôles, sans toutefois donner les caractéristiques techniques précises de chacun d'entre eux, lesquels feront l'objet d'une étude détaillée ultérieure (cf. chapitres 7 et 11).
II. 1. — Dipôles linéaires résistifs
a) Résistors
Un résistor est un dipôle récepteur qui satisfait à la loi d'Ohm, selon laquelle l'intensité du courant
qui le traverse est proportionnelle à la tension à ses bornes (cf. Électromagnétisme) ; on l'appelle aussi
conducteur ohmique. C'est le dipôle le plus utilisé.
1. Lois de base des circuits en régime stationnaire
8
La seule caractéristique d'un résister est son coefficient de proportionnalité entre l et U, appelé
conductance G ou son inverse la résistance R . Ainsi, pour un résistor de bornes A et 5, on a :
/ = GU
ou
U = RI
avec
/ — /^g
U = Vab
e
t
G= —
R
Soulignons que ces relations sont valables, en valeurs algébriques, selon la convention récepteur que
nous avons adoptée, et rappelons la règle mnémotechnique simple qui permet d'écrire la loi d'Ohm de
façon automatique sans risque d'erreur de signe : U = RI lorsque les flèches du courant et de la tension
sont de sens opposés.
Le graphe de la caractéristique I{U) est une droite passant par l'origine dont la pente est G et son
inverse R. Le résistor est donc un dipôle passif, linéaire et symétrique.
Plus la résistance est élevée, plus la conductance est faible et plus la caractéristique s'approche de
l'axe des tensions. Inversement, plus la résistance est faible, plus la conductance est grande et plus sa
caractéristique s'approche de l'axe des courants (Fig. 1.12).
U
R = 50 kQ
/? = lOOQ
b)
a)
FIG. 1.12.
Remarques ; 1) On confond souvent, par abus de langage, le composant résistor avec la résistance qui
exprime sa propriété ohmique.
2) En convention générateur, où U = Uab rnais / = Iba , on aurait évidemment :
1=
U
ou
R
U =-RI
Les flèches courant et tension sont alors de même sens.
Ordres de grandeur : en unités SI, la résistance électrique s'exprime en ohm, de symbole fl, et
la conductance en siemens, de symbole S ; les valeurs des résistances utilisées varient entre quelques
ohms et plusieurs mégohms ( 1 MO = 106 fl ).
La résistance minimale du corps humain, mesurée entre les deux mains, vaut environ 5 kfi. Sachant qu'un courant stationnaire, d'intensité inférieure à 20 mA n'est pas mortel, déterminons la tension stationnaire maximale que l'on peut subir sans risque. D'après la loi d'Ohm, on a :
[/ = /?/ = 5 x 103 x 0,02 = 100 V
Ainsi, une tension stationnaire inférieure à 100 V est sans danger; par précaution, cette valeur est
souvent abaissée à 50 V .
Lois de base des circuits en régime sîationnaire
9
b) Fils conducteurs et interrupteurs parfaits
Les fils de connexion entre dipôles sont des conducteurs ohmiques de résistance négligeable devant
les autres résistances du circuit. On peut les assimiler à des conducteurs cylindriques de longueur / et
de section 5 ; leur résistance est donnée par l'expression (cf. Électromagnétisme) :
R=
l
ys
y étant la conductivité du matériau.
Par exemple, la résistance d'un fil de cuivre, de longueur / = 30 cm et de section s = 1 mm2 ,
vaut, puisque la conductivité y du cuivre est environ 5,8 x 107 S • m-1 :
R=
0.3
5,8 x 107 x 10 -6
= 0,005 a
On peut donc les considérer comme des conducteurs parfaits qui n'opposent aucune résistance au passage du courant : la tension entre leurs bornes est nulle, quelle que soit l'intensité du courant qui les traverse. La caractéristique des fils conducteurs parfaits est très simple puisqu'elle est donnée par l'équation U = 0 ; le graphe correspondant coïncide évidemment avec l'axe des ordonnées.
Lorsqu'ils sont fermés, les interrupteurs se comportent comme de simples fils de connexion. On
peut alors les assimiler à des fils parfaits (Fig. 1.13a). Ouverts, ils ne laissent passer aucun courant
(Fig. 1.13b) et l'équation de leur caractéristique est alors 7 = 0 et le graphe correspondant est une
droite confondue avec l'axe des tensions.
I
->—«■
r
u
u
u
a)
u
b)
FIG. 1.13.
c) Thermistance
Alors que la résistance d'un conducteur ohmique métallique augmente faiblement avec la température (cf. Électromagnétisme), les thermistance s sont des dipôles passifs et symétriques, dont la résistance diminue fortement avec la température absolue T, selon :
R — A exp ^ j
A et S étant deux constantes.
Ordre de grandeur : A = 1,2 x 10-5 XI, B = 5 500 K. Ainsi, à 7 = 300 K, /? = 1 100 fi et à
7 = 350K, /? = 80fi.
1. Lois de base des circuits en régime stationnaire
10
Pour une valeur déterminée de 7, la caractéristique d'une thermistance est une droite passant
par l'origine tant que les tensions ou les courants restent faibles. L'ensemble de ces droites, à diverses
températures, forment le réseau de caractéristiques de la thermistance (Fig 1.14a).
Le plus souvent, on utilise les thermistances pour mesurer et réguler des températures, car elles
permettent de compenser les dérives thermiques et ainsi d'éviter la surchauffe de composants fragiles.
//É
>
/A
r=400K
Fort écl ai rement
r=350K
U
Éclairement ambiant
u
Obscurité
r=300K
u
U
h)
a)
FIG. 1.14.
d) Photorésistance
Les photorésistances sont des dipôles passifs, linéaires et symétriques, dont la conductance augmente avec F éclairement lumineux E (cf. Optique), auquel elles sont exposées, presque proportionnellement :
G~KÉ
où K est un coefficient qui dépend de la photorésistance. Pour une valeur déterminée de F éclairement,
les caractéristiques sont des droites passant par l'origine (Fig 1.14b).
Ordre de grandeur : dans l'obscurité, la conductance G d'une photorésistance au sulfure de cadmium vaut 1 jjlS , d'où 7=1 MO ; lorsqu'on la soumet à un faible éclairement, par exemple celui
d'une lampe de poche placée à une vingtaine de centimètres ( É « 1 W • m-2 ), G augmente jusqu'à
40 fxS , soit 7 = 25 kfl.
On utilise les photorésistances pour détecter et mesurer de faibles éclairements.
II. 2, — Dipôles passifs non linéaires
a) Résistance dynamique
Les composants non linéaires sont souvent utilisés de telle sorte que le point représentatif sur leur
caractéristique varie dans le voisinage d'un point de fonctionnement. Une légère variation de tension
produit une faible variation d'intensité qui lui est proportionnelle ; on définit alors la conductance et la
résistance dynamiques selon :
Lois de base des circuits en régime sîationnaire
11
b) Varistances
Ce sont des dipôles symétriques mais non linéaires, dont la résistance diminue en général avec
l'intensité du courant qui les traverse. Brièvement, on les appelle RNL, pour Résistance Non Linéaire,
(ou VDR, de l'anglais Voltage Dépendance Resistor). Leur caractéristique se met sous la forme :
I = k\U\a
où a est un facteur réel compris entre 2 et 10. On les utilise le plus souvent comme limiteur de tension.
Sur la figure 1.15, donnant le graphe de la caractéristique d'une varistance, on a fait apparaître la résistance en régime stationnaire R = U/I ztl'd résistance dynamique Rj autour du point (U ,1).
1
/■ l
j
/
U
Pente l/R /
/ Pente 1/7?^
—
1
w
7
o
U
'
Fig. 1.15.
Exemple : établissons la relation entre la résistance en régime stationnaire et la résistance dynamique d'une varistance. Pour cela, écrivons l'expression d'une variation d'intensité d/ consécutive à
une variation élémentaire de tension d U :
d/ = akUa~{ d U
d'où
— —
= akUa~l = a— = —
Rd
dU
U
R
Ainsi, la résistance dynamique d'une varistance est a fois plus faible que sa résistance R : Rci = Rla.
Pour une varistance de coefficient k = 15,6 x 10-6 SI et cr = 5, on trouve, autour des deux
points de fonctionnement / = 0,50 mA et / = 100 mA, respectivement :
/ = 0,50 mA
/= 100 mA
U = 2,0V
U = 5,8 V
R = 4000 O
= 58 O
et
et
Rd = 800 O
7^ = 11,60
On voit que R et Rd de la varistance diminuent fortement lorsque U augmente. Une surtension accidentelle provoque donc une surintensité dans la varistance, ce qui permet de protéger tout dipôle en
dérivation d'une surintensité capable de le détériorer.
c) Diode à jonction
Une diode idéale est un dipôle qui ne laisse passer le courant que dans un seul sens, sans lui opposer
aucune résistance. C'est donc un composant non symétrique qui se comporte comme un interrupteur,
ouvert dans un sens et fermé dans l'autre (Fig. 1.16).
Lorsqu'elle est traversée par un courant, la diode est passante ou « branchée en sens direct ». Elle
est dite bloquée ou « branchée en sens inverse », dans l'autre cas, et oppose alors une résistance infinie
au passage du courant. Le symbole de la diode (Fig. 1.16), formé d'une flèche indiquant le sens passant
et d'une barre représentant le sens bloqué, traduit précisément la propriété de passage monodirectionnel
du courant.
12
1. Lois de base des circuits en régime stationnaire
-J-OI-
U
Pente 1 / Ri
u
Diode passante
Diode passante
0
0
U
Diode bloquée
^
Diode bloquée
U
Diode idéale
FIG. 1.16.
FTG. 1.17.
Les diodes à jonction de semiconducteurs, dont la caractéristique s'écarte de celle d'une diode
idéale, seront étudiées en détail ultérieurement (cf. chapitre 7). Citons cependant dès maintenant deux
inconvénients des diodes réelles :
i) branchées en sens direct, elles ne laissent passer un courant que si la tension à leurs bornes atteint
une tension de seuil Ud, laquelle est de l'ordre de 0,6 V pour les diodes au silicium ;
ii) branchées en sens direct et fonctionnant en mode passant, la tension à leurs bornes ne reste
pas constante mais augmente avec le courant qui les traverse ; elles présentent donc une résistance interne Ri.
On tient compte de ces deux défauts en représentant la caractéristique d'une diode réelle par deux
portions de droite (Fig. 1.17), l'une relative au régime bloqué et l'autre au régime passant, ce que l'on
traduit ainsi :
U-Ud
T
pour U > Ud
7 = 0 pour U < Ud
et
Ri
d) Diode Zener
Les diodes Zener, du nom de leur inventeur, le physicien allemand C. Zener, sont des diodes qui
deviennent passantes en sens inverse lorsque la tension à leurs bornes atteint une valeur seuil Uz,
appelée tension Zener, fixée qui est de l'ordre de quelques volts. Leur caractéristique (Fig. 1.18) est
constituée de trois segments de droite, modélisant respectivement le régime bloqué, le régime passant
en sens direct et le régime passant en sens inverse ; ce dernier est représenté par une portion de droite
pratiquement parallèle à l'axe des ordonnées. Ainsi, on a analytiquement 7 = 0 pour —Uz<U<Ud,
puis aux extrémités :
7=
U + Uz
R't
pour
r
U < —Uz
et
U - Ud
I= —
Ri
pour
U > Ud
R'i étant la résistance dynamique très faible de la diode en fonctionnement Zener.
U
Diode passante
sens direct
Diode passante
en sens inverse
Diode bloo uee
Fig. 1.18.
U
Lois de base des circuits en régime sîationnaire
13
II. 3. — Source de tension et source de courant
La fonction essentielle des sources électriques est de fournir, à des composants regroupés en circuits, la puissance électrique nécessaire à leur fonctionnement. Nous ne considérons dans cette introduction que les sources indépendantes du reste du circuit. Les sources commandées ou liées, très utiles
dans l'étude d'éléments actifs tels que les transistors, seront analysées ultérieurement (cf. chapitre 5).
a) Source de tension
Une source de tension idéale est un dipôle qui maintient, à ses bornes, la tension délivrée, quelle
que soit l'intensité du courant débité.
Cette tension constante est la force électromotrice E, du générateur, f.e.m. en abrégé (cf. Électromagnétisme). La caractéristique d'une telle source est une droite, parallèle à l'axe des intensités d'équation U = —E (Fig. 1.19a) ; dans le coin supérieur droit de la figure, on a représenté le symbole d'une
source idéale de tension.
E
/
/
Pente
l/i?;
U
2
-E
2
1
0
0
1
4 ^
3
b)
a)
fig. 1.19,
Les points de la caractéristique, situés dans le troisième quadrant où l'intensité est négative, correspondent au fonctionnement du générateur en mode récepteur : dans ces conditions, la pile se recharge.
Notons que si le générateur n'a pas été conçu pour être rechargé, ces conditions d'utilisation lui sont nuisibles au point de le détériorer.
La plupart des sources électriques stationnaires disponibles sont des sources de tension. En effet,
les appareils électroniques les plus répandus fonctionnent sous tension constante, par exemple avec des
piles « bâtons », de f.e.m 1,5 V, ou une batterie d'accumulateurs au plomb, de f.e.m 12V.
En réalité, lorsque la source de tension débite un courant, on constate que la tension à ses bornes
varie de façon affine selon :
U = RJ - E
Ri étant la résistance interne du générateur. La caractéristique réelle d'un générateur est donc la droite,
de pente l/R,, qui passe par le point 7 = 0. U = —E (Fig. 1.19b) :
/-
U + E
Ri
Un générateur de tension réel se rapproche d'autant plus d'une source de tension idéale que sa résistance
interne est faible comparée aux résistances des autres dipôles intervenant dans le circuit. Ainsi, une pile
de 1,5 V, de type R\4, possède une résistance interne de l'ordre de 1 H , alors qu'une batterie de
voiture possède une résistance interne beaucoup plus faible, de l'ordre de quelques centièmes d'ohm.
Exemple : une lampe de poche fonctionne avec une pile plate de 4,5 V . A vide, on mesure la f.e.m
£ = 4, 82 V . En fonctionnement, lorsque l'intensité du courant qui traverse la lampe est / = 0.30 A ,
la tension mesurée aux bornes de la pile est, en convention récepteur, U = —4,46 V (Fig. 1.20). On en
14
1. Lois de base des circuits en régime stationnaire
déduit la résistance interne Ri de la pile, ainsi que la résistance R de la lampe, selon :
Ri =
U+E
-4,46 + 4,82
I
0,30
= 1,2 0.
et
Ui
R= — =
/
U
4,46
/
0,30
= 14,90
U[ = —U étant la tension aux bornes de la lampe.
+
Pile
plate
u
Lampe U/
-+i
Fig. 1.20.
b) Source de courant
Moins utilisés que les générateurs de tension, les générateurs de courant sont pourtant très intéressants, à la fois sur les plans pratique et théorique.
Un générateur de courant idéal débite un courant T (grand iota), appelé courant électromoteur
c.e.m ou courant de court-circuit, quelle que soit la tension à ses bornes.
Sa caractéristique est donc une droite parallèle à Taxe des abscisses, d'équation 1 = 1
(Fig. 1.21a); dans le coin supérieur droit de la figure, on a dessiné le symbole d'une source idéale
de courant.
En réalité, lorsque la source débite, on constate que la tension à ses bornes varie. Si Rj est la
résistance interne du générateur, la caractéristique est une droite, de pente l//?(, qui passe par le point
U = 0, 1 = 1 (Fig. 1.21b):
/
U
+x
Ri
Comme pour les générateurs de tension, les points de la caractéristique situés dans la zone où f/ > 0
correspondent au fonctionnement du générateur de courant en mode récepteur et lui sont dommageables
s'il n'a pas été conçu pour être rechargé.
X
U
..-
hi
Pente \IRi
u
X
2
X
1
0
2
4
3
U
1
0
4
3
a)
U
b)
Fig. 1.21.
Un générateur de courant réel se rapproche d'autant plus d'une source de courant idéale que sa
résistance interne est élevée, comparée aux résistances des autres dipôles intervenant dans le circuit. Les
cellules photoélectriques, les ohmmètres et les antennes sont des exemples de sources de courant.
Remarque : Les générateurs réels de tension et de courant seront généralement modélisés par un générateur idéal associé à une résistance.
c) Équivalence entre source de tension et source de courant
Les deux types de générateurs tension et courant sont équivalents, puisque leurs caractéristiques
s'écrivent ;
/=
U -VE
~Rr
ou
en posant
X=
Ri
Lois de base des circuits en régime sîationnaire
15
Ainsi, un générateur de tension, de f.e.m E et de résistance interne /?/, est équivalent à un générateur de
courant de même résistance interne et de c.e.m X = E/Rj. Cette équivalence, bien que très commode
pour faciliter l'analyse théorique des circuits, n'a aucune signification pratique puisque les résistances
internes des générateurs de courant et de tension sont très différentes.
Exemple : le générateur de courant équivalent à une pile de 9 V, dont la résistance interne est
Ri = 2 El possède un c.e.m X = 9/2 = 4,5 A. Évidemment, une telle pile doit, en pratique, être
utilisée en générateur de tension et débiter des courants d'intensité très faible devant X, sous peine de
détérioration. Cependant, conceptuellement, pour le calcul des courants et des tensions dans un circuit
électrique, cette pile peut être remplacée par le générateur de courant équivalent.
En pratique, il est très facile de différencier une source de tension réelle, pour laquelle la résistance
interne est faible devant la résistance de charge, ce qui implique U = RJ — E m —E, d'une source
de courant réelle caractérisée par une résistance interne élevée devant la résistance de charge, ce qui
entraîne I = U/Ri + X œ X.
Remarque : Les sources idéales de tension (/?, = 0) et de courant {Ri = oc) ne sont pas réalisables
car la puissance qu'elles fournissent pourrait être infinie.
III. — LOIS DE KIRCHHOFF EN RÉGIME STATIONNAIRE
En associant plusieurs dipôles entre eux, on réalise un circuit ou réseau dont l'état électrique est
caractérisé par l'ensemble des tensions aux bornes des différents dipôles et par l'ensemble des courants
qui les traversent.
III. 1. — Nœud, branche, maille et potentiel de référence d'un réseau
Les différents dipôles constituant un réseau sont reliés par des fils de connexion, de résistance
négligeable devant toutes les autres résistances du circuit.
Un point de connection, relié à trois dipôles au moins, est appelé nœud du réseau. Toute portion du
réseau entre deux nœuds est une branche. Une boucle fermée, ne passant qX une seule fois par un nœud
donné, forme une maille.
Ainsi sur le circuit de la figure 1.22, A, B, C et D sont des nœuds, AB, AC, BD, AD sont des
branches et ABDA , ABC A et ABCDA sont des mailles.
A'-sV
u,
u.
Vi
hl
M
u,
V,
VU.
4- L
D
B
u.
^6 .
^5
U*
p,
c
FIG. 1.22.
Une fois chaque composant d'un circuit identifié et son emplacement connu dans un réseau, on désigne arbitrairement les intensités des courants dans chaque branche, ainsi que les tensions aux bornes
de chaque dipôle, en choisissant une orientation pour toute l'étude (Fig. 1.22). Les intensités des courants et les tensions sont alors des grandeurs algébriques : si, après analyse, la valeur de l'intensité dans
1. Lois de base des circuits en régime statioimaire
16
une branche est positive, le courant circule bien dans le sens initialement choisi ; si cette valeur est négative, le courant circule dans le sens opposé.
Le potentiel de référence ou masse d'un circuit est un point arbitraire du réseau, par rapport auquel
toutes les tensions sont exprimées. Concrètement, on adopte le plus souvent pour masse d'un circuit
la borne négative du générateur d'alimentation. Le potentiel de la masse M étant pris égal à zéro, on
écrira, entre les points A et S, puisque Vm = 0 (Fig. 1.22) :
Uab = Va — Vb = Uam — Ubm
avec
Uam — Va — VM = Va
et
Ubm — Vb — Vm = VB
III. 2. — Lois de Kirchhoff
Les deux lois de Kirchhoff sont à la base de l'analyse et de la détermination de l'état électrique des
circuits, lequel est déterminé par la connaissance de tous les courants dans les branches et de toutes les
tensions entre deux nœuds.
a) Loi des nœuds
Cette loi exprime la conservation de la charge, ainsi que son caractère conservatif (cf. Électromagnétisme). En effet, entre deux dates infiniment voisines, la charge contenue dans un volume i n'entourant que le nœud A , se présente sous la forme de la charge qui pénètre dans ce volume en traversant
la surface, augmentée de la charge éventuellement créée à l'intérieur de ce volume (Fig. 1.22) :
dQ. = SQ{r) + ÔQ(c)
Or, la charge est une grandeur qui ne peut être créée ; on dit qu'elle est conservative : 8QV) = 0 .
Comme, en outre, en régime stationnaire, Q ne varie pas au cours du temps, dQ = 0, il en
résulte :
5g(r) = 0
ce qui signifie que toutes les charges, qui pénètrent dans le volume F , en ressortent; il n'y a pas
d'accumulation de charges en tout nœud du circuit et par conséquent la somme algébrique des intensités
//_. des courants arrivant sur un nœud est nulle :
y>,A=o
Dans cette dernière expression, on compte positivement les courants orientés vers le nœud A (
— 1)
—
et négativement les courants orientés vers tout autre nœud ( sk = 1 ) ; soulignons que la somme porte
sur les n branches qui concourent en A . Ainsi, en ce nœud sur la figure 1.22, on a :
î\ — f — h = 0
ce qui donne
I\ = h + h
et que l'on traduit par : la somme des intensités des courants entrant dans le nœud A est égale à la
somme des intensités des courants qui sortent de ce nœud.
h) Loi des mailles
La loi des mailles traduit, elle, l'additivité des tensions et la propriété du potentiel électrostatique
de ne dépendre que du point considéré (cf. Électromagnétisme).
17
Lois de base des circuits en régime sîationnaire
Ainsi, la somme des tensions aux bornes des branches d'une maille, décrite dans un sens quelconque, est nulle, soit :
k=\
où £ = 1 si la tension algébrique est orientée selon le sens choisi pour la maille, et £ = — 1 sinon.
Par exemple, dans le réseau de la figure 1.22, cette loi, appliquée à la maille ABCA orientée dans
le sens des aiguilles d'une montre, donne :
-c/3 +1/6 - f/; - t/i = o
c) Application au pont de Wheatstone
On appelle pont de Wheatstone. du nom du physicien britannique C. Wheatstone, le circuit électrique qui permet de déterminer avec précision la valeur d'une résistance. Ce circuit, représenté sur la
figure 1.23a, comporte quatre résistors de résistance R\ , R2 , R3 et R4 , formant un carré alimenté selon une diagonale par un générateur de tension ; un ampèremètre, équivalent à une résistance Ra , est
connecté entre les bornes de l'autre diagonale. Afin de déterminer la résistance inconnue R4 , l'opérateur modifie la valeur de la résistance réglable R\ , jusqu'à ce que le courant dans la branche centrale soit nul ; le pont de Wheatstone est alors équilibré. La relation simple entre les résistances Ri avec
* = 1, 2, 3 ou 4, que nous allons établir permet alors de détenuiner la valeur de la résistance inconnue.
a.
Rx
Ux
«4
Ra
Rx
A
B
h
C
R
Ri
«3
Uo
ï
Ri
hi D
a)
"3
h
U3
J
b)
FIG. 1.23.
Introduisons les grandeurs électriques caractérisant l'état électrique du circuit : courants dans les
différentes branches et tensions aux bornes des différents dipôles (Fig. 1.23b). Pour établir les relations
entre ces grandeurs, utilisons la loi des nœuds et celle des mailles. La première appliquée aux nœuds
A , B et C donne les trois équations suivantes :
/ = /| + 74
/j = /2 + la
h= Ia+ h
La seconde, appliquée aux trois mailles ACDA , ABDA et ACBA , fournit les trois équations suivantes :
£ - f/4 - f/3 = 0
£-£/]- f/2 = 0
f/| - f/4 + £/« = 0
1. Lois de base des circuits en régime staîionnaire
18
Remarques : 1 ) La loi des nœuds appliquée au nœud D donne une quatrième équation qui n'est qu'une
combinaison linéaire des trois autres. Le nombre d'équations indépendantes données par
la loi des nœuds est donc inférieur d'une unité au nombre de nœuds du circuit (cf. chapitre 5).
2) De la même manière, la loi des mailles appliquée à tout autre maille conduit à une équation que l'on peut obtenir par combinaison linéaire des trois équations précédentes puisque
les trois mailles choisies englobent l'ensemble des branches du circuit (cf. chapitre 5).
Il ne reste alors qu'à écrire les relations entre les tensions et les courants imposés par les dipôles :
Ui = RJi où z = 1, 2, 3 ou 4, et Ua = Raîa . Le système d'équations se résout progressivement et
donne finalement :
E — ^4/4 + Rz{la + U)
On en déduit
E = R\l\ + Rii—Iu-L h)
RJa — —R[h + ^4^4
et J\ en fonction de l'inconnue Ja :
j _ E — Rjlq
R3 + R4
j _ E + #24
1
R[
R2
d'où :
(
la \Ra +
RxRt
R2R4 \
R\5
R4
Lj
- +
= -E
+E
Ri+Ri
R3 + R4J
R1+R2
R3-LR4
E
^2^4-^1^3
L, = — tt:
—rrz;
r
« (i?, + R2){R3 + ^4)
avec
.
D
a = Rn ^
^1^2
/?| + /?2
,
^3^4
R3 + R4
Le coefficient a étant strictement positif, Ia ne peut s'annuler qu'à la condition suivante :
R1R2 = R2R4
Exemple : avec R2 = 1,0 kO , R^ = 10,0 kll et une valeur de R[ ajustée à 165 11, qui pennet
de réaliser l'équilibre du pont, on trouve R4 = 165 x 10/1 = 1.65 kll.
III. 3. — Lois dérivées pour les circuits linéaires
Dans le cas très fréquent, où le circuit peut se ramener à un ensemble de dipôles linéaires et de
générateurs de courant ou de tension, les lois de Kirchhoff prennent une forme simple.
û
(N
o
a) Loi de Pouillet
La loi de Pouillet, établie par le physicien français C. Pouillet en 1884, est relative à des circuits
ne comportant qu'une seule maille et dont les générateurs réels de courant ont été remplacés par les
générateurs de tension équivalents. On détermine alors simplement la valeur de l'intensité du courant
dans la maille. En effet, sur l'exemple de la figure 1.24, la loi des mailles s'écrit :
o
(J
Uab + UBc 4- Uca = 0
soit
E\ + R\1 ~ E2 + R2I + R:J = 0
d'où
J?
l = ——/——' D
Ri E R2 E R3
d'où l'énoncé suivant : l'intensité du courant, dans un circuit ne comportant qu'une seule maille, est
égale au rapport de la somme algébrique des fe. m des générateurs de tension sur la somme des résistances de la maille.
Lois de base des circuits en régime sîationnaire
19
Remarque : Notons que l'application de la loi de Pouillet ne présente aucun intérêt si la maille comporte un générateur de courant parfait, ce dernier imposant par définition un courant dont
l'intensité est égale à son c.e.m.
Rn
B
C
R.
G,
G.
U.
R-.
L
X.
À
FlG. 1.24.
////
////
1
////
1
A
1 ^3
7777"
FlG. 1.25.
b) Théorème de Millman
C'est en 1941 que le physicien américain J. Millman proposa une réécriture de la loi des nœuds en
fonction des seules tensions, ce qui s'avère très commode et très efficace, notamment dans les montages
comportant des amplificateurs opérationnels (cf. chapitre 8).
Il est instructif d'établir ce théorème à l'aide de l'exemple choisi par Millman lui-même, dans sa
publication originale. Les nœuds A/, avec i = 1 , 2 ou 3 de la figure 1.25 sont portés à des potentiels
connus par les tensions Ui entre ces points et la masse.
Comme l'intensité du courant dans la branche i, de conductance
expression // = G/(G/ — G^), la loi des nœuds donne ;
, arrivant au nœud A a pour
3
V /, = G, {Ut - Va) + GjSUj - UA) + G3(C/3 -Ua)=0
(=1
d'où la tension Ua :
Ua =
G\U\ + G2 G2 + G3 G3
G, + G2 + G3
Cette expression de la tension au nœud A constitue le théorème de Millman.
On généralise aisément ce théorème à des circuits quelconques comportant en outre des générateurs
de tension ou de courant. Il vient, dans le cas de la figure 1.26 :
/j + /2 + /s + /4 + /s — 0
h = 02(1/2 + E2 — Ua)
avec
h = ^(Gs — £3 — Ua)
I\ = Gj {G| — G,4)
h = ^4
et
I5 = —X5 + G5(G5 — Ua)
On trouve, en substituant :
UA =
G, G, + G2G2 + G3G3 + G5U5 + G2E2 - G3E3 + 24 - X5
G| -F G2 -)- G3 + G5
Retenons, l'expression suivante du théorème de Millman généralisé, donnant la tension au nœud
A , en fonction des conductances :
Ua =
OkjUk + SkEk) + t'jU-k
1. Lois de base des circuits en régime stationnaire
20
G
R
G
E
_L
24
R
R
G
R
25
M
t
777T
5'
FIG. 1.26.
FIG. 1.27.
les sommations portant sur toutes les branches arrivant au nœud A ; dans cette expression, les facteurs
£k et e'k valent 1 si les flèches des f.e.m et des c.e.m sont orientées vers le nœud A , et —1 dans le cas
contraire. On l'écrit souvent en fonction des résistances :
Ua =
+ £kEk)/Rk + 6'kIk
Remarques : 1) Le théorème de Millman s'applique également au point de masse M du circuit ; il
convient, dans ce cas, de prendre en compte toutes les connexions du circuit à la masse
(cf. Exercices).
2) Ce théorème ne présente aucun intérêt lorsque l'une des branches connectées au nœud
A ne comporte qu'un générateur de tension parfait, puisque la tension est fixée par le
générateur, quels que soient les dipôles dans les autres branches.
Exemple : déterminons les tensions aux nœuds 1 et 2 dans le circuit simple, représenté sur la
figure 1.27, pour lequel £" = 10 V, /? = 1 kfî et 2 = 10 mA, sachant que le nœud 3 sert de masse.
Appliquons le théorème de Millman en 1 puis en 2 . Il vient :
U2IR + EIR
f/i =
l/R+l/R+l/R
et
U2
Ux/R + T
l/R+l/R
La résolution de ce système linéaire à deux inconnues est simple. Elle donne :
?>RTA-E
U2 =
10
30+10
_
— = ow
8V
5
et
_
RX + 2E
r.
U\
= R1 + 2E
10 + 20
6V
III. 4. — Utilisation des symétries du réseau
Lorsque le circuit présente des symétries, l'analyse se simplifie puisque la distribution des tensions
et des courants présente également des symétries. Nous rappelons ici les résultats utiles que Ton établit
généralement dans le cadre de l'électromagnétisme (cf. Électromagnétisme).
Lois de base des circuits en régime sîationnaire
21
a) Symétrie du réseau par rapport à un plan
Un réseau présente un plan de symétrie électrocinétique V si, à chaque branche du circuit, on peut
associer, par symétrie par rapport à ce plan, une branche identique. Notons que cela implique, pour des
dipôles non symétriques, une correspondance borne à borne, entrée ou sortie, avec leurs symétriques par
rapport au plan V (Fig. 1.28a). En outre, si la symétrie ne concerne qu'une portion du circuit, il faut
que les points d'alimentation de cette portion soient contenus dans V (Fig. 1.28b).
Plan de symétrie P
Plan de symétrie 'P
T
t
2R
R
2R
2R
1
R'
R
:
\2R
R
R
R
R
J
a)
b)
Fig. 1.28.
Pour un réseau ou une portion du réseau qui présente un plan de symétrie P :
i) les points symétriques par rapport à P sont au même potentiel,
ii) la distribution des courants est symétrique par rapport à P ; aucun courant ne traverse alors P .
Exemple : cherchons à déterminer, à l'aide des symétries, la résistance du réseau de la figure 1.29a,
entre les points /4 et fi d'alimentation, sachant que chaque segment du réseau représente un conducteur
ohmique, de résistance R = 10011. En raison des symétries, le plan perpendiculaire au plan du réseau,
qui contient l'axe AJB, est un plan de symétrie. Comme aucun courant ne traverse ce plan, on a les
relations suivantes :
la = IJE
et
Îfj = bu
Le nœud J peut alors être dissocié en deux nœuds indépendants (Fig. 1.29b), ce qui simplifie l'analyse
car les différents résistors peuvent être associés de manière simple (cf. paragraphe IV).
Plan d'antisymétrie
Q
?
C"
D
V
D
C
n j
G
E
v
H
H
H
c)
Fig. 1.29.
b) Antisymétrie du réseau par rapport à un plan
Un réseau présente un plan d'antisymétrie électrocinétique Q si, à chaque branche du circuit, correspond, par symétrie par rapport à Q , une branche identique dans laquelle les dipôles non symétriques
sont inversés : à chaque borne d'entrée ou de sortie, est associée la borne de type opposé dans le dipôle image (Fig. 1.30a).
22
1. Lois de base des circuits en régime stationnaire
Si l'antisymétrie ne concerne qu'une portion du circuit, les points d'alimentation de cette portion
doivent être symétriques par rapport à Q (Fig. 1.30b).
Plan d'antisymétrie Q
i
Plan d'antisymétrie Q
2R
I
2R
4R
2R
4R
R/l
E
2R
2R
A
.
R/2
R/2
2R
R/2
b)
a)
Fig. 1.30.
Pour un réseau ou une portion de réseau présentant un plan d'antisymétrie électrocinétique Q :
i) les points de Q sont au même potentiel ;
ii) la répartition des courants est antisymétrique par rapport à Q.
Exemple : reprenons le réseau de la figure 1.29a et déterminons, à l'aide des antisymétries, la
résistance équivalente entre les points A et B d'alimentation. Le plan perpendiculaire au plan du réseau,
qui contient l'axe DJG, est un plan d'antisymétrie ; on en déduit que les nœuds D, / et G sont au
même potentiel. Il est alors possible de les relier entre eux par un fil de connexion sans modifier la
distribution des courants (Fig. 1.29c). Le circuit obtenu est plus simple à analyser car les différents
résistors peuvent être associés de manière simple (cf. paragraphe IV).
IY. — ASSOCIATIONS DE DIPÔLES
On associe très souvent les dipôles entre eux, soit pour simplifier l'analyse d'un réseau, soit pour
réaliser un circuit, lorsqu'on connecte les bornes d'un dipôle générateur à celles d'un dipôle récepteur.
La simplification d'un circuit s'appuie essentiellement sur deux types d'association : série et parallèle.
IV, 1. — Association en série
La manière la plus simple d'associer deux dipôles est de les brancher en série, c'est-à-dire d'imposer qu'ils soient parcourus par le même courant, ce qu'on réalise en mettant en commun une borne de
chacun d'entre eux, et en considérant le dipôle résultant entre les deux autres bornes laissées libres.
Notons que deux dipôles sont encore en série si, malgré une connexion de la borne commune avec
une autre branche, aucun courant ne circule dans cette branche (Fig. 1.31); ceci est réalisé avec un
oscilloscope, un voltmètre ou un amplificateur opérationnel, tous trois ne prélevant qu'un très faible
courant.
a) Association en série de deux résistors
Les relations caractéristiques de l'association en série, c'est-à-dire l'addition des tensions et l'égalité des intensités se déduisent directement de la définition :
U = U\ + U2
et
/, = /2 = /
Lois de base des circuits en régime stationnaire
23
V
V
U,
v
/=0
U
/^o
Ui
ir~C
U2
V
s.) D] et D2 sont en série
h) D^ et V2 ne sont pas en série
Fig. 1.31.
Appliquée à deux résistors, avec U\ = R]I] et U2 = Rih, l'association en série donne une
résistance équivalente Re égale à l'addition des résistances R\ et R2 :
U = ReI = R\I\ + R2I2 = (^1 + Ri)!
soit finalement
Re = R\ + /?2
b) Association en série de deux générateurs parfaits
Pour deux sources de tension parfaites, de f.e.m E\ et Eo respectivement, l'association en série
donne une source de tension parfaite de f.e.m équivalente :
Ee = £, + £2
Exemple : les piles plates de 4,5 V sont réalisées en associant en série de trois piles bâtons de
f.e.m 1,5V chacune.
Remarques : 1) Il est évidemment impossible de connecter en série deux générateurs de courant parfaits,
qui n'ont pas le même courant électromoteur, puisque, par définition, chacun doit imposer
la valeur de son c.e.m. On lève ce type de contradiction théorique en tenant compte des
imperfections de ces deux générateurs, c'est-à-dire de leurs résistances internes.
2) Un dipôle, constitué de l'association en série d'une source de courant parfaite avec
n'importe quel autre dipôle, est équivalent au générateur de courant parfait seul, puisqu'alors / = X, quel que soit U, et donc quel que soit l'autre dipôle placé en série.
c) Association en série de générateurs réels
L'association en série d'une source de tension parfaite, de f.e.m E et d'un résister de résistance Ri,
permet de représenter un générateur de tension réel (Fig. 1.32). En effet, l'équation de la caractéristique
de ce dipôle est : U = RJ — E.
E
R:
U
FIG. 1.32.
Pour deux générateurs de tension réels, de caractéristiques {E| ,R\} et {£2, ^2} » que l'on associe
en série, on a :
Ee = E| -|- E2
et
Rj = Ri
R?
24
1. Lois de base des circuits en régime stationnaire
Lorsque deux générateurs de courant réels X\, R\ et Xi.Ri sont en série, il faut préalablement les
transformer en générateurs de tension équivalents avant de les remplacer par le générateur équivalent :
Ee — R\X\ -(- R2X2
et
Rj — R\ + R2
IV. 2. — Association en parallèle ou dérivation
Une seconde façon d'associer deux dipôles est de les brancher en parallèle, également appelé
branchement en dérivation, c'est-à-dire de les connecter bornes à bornes (Fig. 1.33) : les bornes A\ et
A2 des dipôles T)\ et X>2 sont reliées entre elles, ainsi que les bornes B] et Bj .
Il en résulte que la tension à leurs bornes est la même et que l'intensité du courant dans le dipôle
résultant est la somme des intensités :
Ul = U2
et
/ = /, + h
A.IA,
V1
i
2
U,
i
Vi
U2
\B2
Fig. 1.33.
a) Association en parallèle de deux résistors
Établissons la règle d'association de deux résistors en parallèle, de résistances respectives R\ et
:
/
=
/|+/2
=
|
+
g
/
= f
(l
+
l)
puisque
U = Ui = U2
d'où
1 = 1 = 1 + 1
où Re représente la résistance équivalente à l'association. Il en résulte :
111
Re
R,
Ri
p
0U
R1R2
'
Ri+Ri
On note que l'association en parallèle de deux résistors donne une résistance équivalente Re , plus petite
que la plus petite des deux résistances initiales. Ainsi lorsqu'on veut court-circuiter un résistor, il suffit
de connecter en parallèle avec lui un fil conducteur de très faible résistance.
Remarque : On note souvent la résistance équivalente à une association en parallèle sous la forme
symbolique Re = R\lIR2 .
Lois de base des circuits en régime sîationnaire
25
Exemples :
1) Détenninons la résistance Re du résister équivalent à l'association en parallèle de n résistors,
de même résistance R :
11
l
" l
" 1
.
.
—
-=y-=yR,,
Ri.
^—4 R = R
d ou
n
Re = —
n
2) Revenons sur le réseau de résistors de la figure 1.29a qui, après analyse des symétries, est
équivalent à celui de la figure 1.29b. On peut facilement déterminer la résistance entre les nœuds A et
B ; en effet, le résister équivalent se réduit alors à l'association en parallèle de deux branches composées
de résistors en parallèle ou en série. Il en résulte que :
3
Rab = 3R//3R = 2R=
150 n
car
Rce = 2R
//2R =
R
Il est possible de retrouver ce résultat à partir de la figure 1.29c obtenue après analyse de 1" antisymétrie.
On a alors :
r
ab= Rad + Rdb avec Rad
=
Rdb
=
A-{R//R)]//[R A-{R//R)] soit Rab = 2 x ( -R/] = -R
2
b) Association en parallèle de deux générateurs parfaits
Pour deux générateurs de courant parfaits, connectés en parallèle et débitant des courants d'intensités respectives I\ et h, l'intensité du courant fourni par le générateur équivalent Ie est :
h — h + f2
Remarques : 1 ) Le montage en parallèle de deux générateurs de tension parfaits n'est possible que s'ils
ont les mêmes f.e.m.
2) Un dipôle constitué par l'association en parallèle d'une source de tension parfaite, avec
n'importe quel autre dipôle, est équivalent au générateur de tension parfait seul, puisque
U = —E, quel que soit I et donc quel que soit l'autre dipôle.
c) Association en parallèle de générateurs réels
■a
o
c
û
CM
1—1
O
(M
(5)
Un générateur de courant réel peut être représenté par l'association en parallèle d'une source de
courant idéale, de c.e.m X et d'un résister de résistance i?, (Fig. 1.34), puisque l'équation de la caractéristique du dipôle ainsi obtenu est : I = U/Ri + X.
!
X
R:
ai
•*—
a
o
(J
U
Fig. 1.34.
Pour deux générateurs de courant réels, de caractéristiques respectives {X|,R|} et {X2, ^2} » que
l'on associe en parallèle, on a :
R R
Xe — X\ + X2
et
Ri —
\ 2
R\ A Ri
1. Lois de base des circuits en régime stationnaire
26
Lorsque deux générateurs de tension réels, caractérisés respectivement par (E!, E|} et {£2-^2} , sont
en parallèle, il convient d'abord de les transfonner en générateurs de courant équivalents de c.e.m
X\ = E\lR\ et X2 = £2/^2 > avant de les remplacer par le générateur de courant suivant :
E\
Eo
Te = — -\—E,
R2
et
^1^2
Ri =
R[ + Ri
IV. 3. — Application aux diviseurs de tension et de courant
a) Diviseur de tension
La connexion des bornes d'une source de tension à celles de deux résistors connectés en série
forme un montage simple et très utile, appelé diviseur de tension (Fig. 1.35). Il permet, en faisant varier
l'une, Ei , des résistances par rapport à l'autre E2, de modifier la tension d'utilisation U] aux bornes
du premier résistor. En effet, l'application des lois de Kirchhoff donne aisément :
E,
U\ =E1/ =
E] + E2
U
puisque
I=
U
Ei + E2
Ainsi, la tension aux bornes du résistor 1 est une fraction de la tension totale. Lorsque E] varie entre
0 et 00, la tension U\ passe de 0 à E. Le diviseur de tension est souvent appelé potentiomètre.
Remarque : Notons que cette relation ne vaut que si le diviseur de tension ne débite lui-même aucun
courant, c'est-à-dire si aucun courant n'arrive ni ne part de la borne commune aux deux
résistors.
Le cas où E! est négligeable devant E2 est celui où l'on introduit un ampèremètre dans un circuit :
la très faible résistance interne de l'ampèremètre ne modifie pratiquement pas la tension aux bornes du
dipôle avec lequel il est en série.
l7
E,
ii
Ui
Al
I
U
f/2
:
E| E2
El
Ui
U2
Ri
Fig. 1.35.
FIG. 1.36.
b) Diviseur de courant
Il existe une version analogue au diviseur de tension, appelée diviseur de courant. La connexion
des bornes d'une source de courant à celles de deux résistors connectés en parallèle forme aussi un
montage simple (Fig. 1.36) qui permet, en faisant varier l'une, R\ , des résistances par rapport à l'autre
E2 , de modifier le courant d'utilisation /1 dans le premier résistor. En effet, il vient en appliquant les
lois de Kirchhoff :
t
r* TT
''= G'U'=
r
•
pulsque
rr
TJ
'
=
2 =
7l
G'i
7:2
=
(h
=
+72
G7+G2
=
I
Ch+Gi
Lois de base des circuits en régime sîaîionnaire
27
Ainsi, le courant qui parcourt le résistor 1 est une fraction du courant total. Lorsque G| varie entre 0
et oo , l'intensité /| passe de 0 à / .
Le cas où G\ est négligeable devant Gi est celui où l'on introduit un voltmètre dans un circuit :
la très faible conductance interne du voltmètre ne modifie pratiquement pas l'intensité du courant qui
parcourt le dipôle avec lequel il est en parallèle.
Remarque : La correspondance entre les expressions du diviseur de tension et du diviseur de courant
est directe ; il suffit de permuter tension et courant d'une part, résistance et conductance
d'autre part. Aussi la qualifie-t-on de duale.
c) Exemple
Dans le circuit de la figure 1.37, où E = 5,0 V et E = 100 D. déterminons la tension Uab et
l'intensité / en considérant une succession de diviseurs de tension ou de courant. On trouve ;
UAB
= RTRUCB = "f
Or Ucb est la tension aux bornes d'une résistance équivalente Rt. = 2R//{R + R) = 2R//2R = R.
En utilisant un deuxième diviseur de tension, on obtient :
Ucb = ——E = x
Re + 2R
2
d'où
UAti
Ab = % = 833 mV
6
et
î=
— 8,33 m A
R
On retrouve la valeur de / à l'aide d'un diviseur de courant ;
I=
2R
I
î8 = -L
2R + R + R
2
h
c
avec
L8 =
E
E
— = —
Re + 2R
2R
d'où
E
/ = — = 8, 33 mA
6/?
R.
R:
y/
CD'
2R
Uab
R
u
s
2R
U
B
FIG. 1.37.
R
Fig. 1.38.
IV. 4. — Point de fonctionnement d'un circuit
Associons deux dipôles afin de former un circuit, l'un des dipôles étant nécessairement actif.
Proposons-nous de déterminer l'intensité du courant dans le circuit, ainsi que la tension aux bornes
des dipôles.
a) Cas simple
Le circuit de la figure 1.38 représente un circuit simple obtenu en associant un dipôle générateur
réel et un résistor, dont les caractéristiques, toutes deux en convention récepteur, sont les suivantes :
i) celle du résistor est I = U/R et se trouve dans le premier quadrant (Fig. 1.39a),
1. Lois de base des circuits en régime stationnaire
28
ii) celle du dipôle générateur satisfait à l'équation :
1=
E + II,
Ri
en convention récepteur E étant la f.e.m du générateur, /?, sa résistance interne et Ug la tension aux
bornes du générateur (Fig. 1.39b).
}■
0r
w
u
Un
a)
Ué
b)
u
c)
Fig. 1.39.
Comme Ug = —U, on détermine graphiquement le point de fonctionnement en portant les deux
caractéristiques sur un même graphique, celle du résistor et celle du générateur après changement de
Ug en -U (Fig. 1.39c) :
U
Ir = —
R
et
Ir =
E
-U
Rl
Le point de fonctionnement est évidemment donné par l'intersection de ces deux droites, puisque les
tensions aux bornes des deux dipôles doivent être égales.
Exemple : avec un générateur de f.e.m E = 1,5 V et de résistance interne Rj = 10 fi, débitant
dans une charge de résistance R = 20 fi, on trouve :
U
E-U
- =
R
Ri
soit
U =
R
R + Rj
E = 1.0 V
et
U
1,0
/ = - = ^- = 50 mA
R
20
b) Cas d'une caractéristique rectiligne par morceaux
Lorsque la caractéristique d'un dipôle est rectiligne par morceaux, ou lorsque l'équation de sa
caractéristique n'est donnée que par morceaux, la détermination du point de fonctionnement exige que
l'on connaisse la zone concernée de la caractéristique.
On résout le système d'équations obtenues, en faisant une hypothèse a priori, et l'on vérifie que
la valeur trouvée est compatible avec cette hypothèse ; si ce n'est pas le cas, on se place dans l'autre
hypothèse.
Exemple : un générateur de courant, de c.e.m J = 20 mA et de résistance interne E, = 1 kfi,
débite dans une diode, de tension de seuil {/</ = 0, 6 V et de résistance interne r, = 20 fi (Fig. 1.40a).
L'équation caractéristique du générateur de courant est donc :
U»
/=—ce qui donne
Ri
U
I—T— —
Ri
car
U =—U8
alors que la caractéristique de la diode est définie par morceaux (Fig 1.40b).
Lois de base des circuits en régime sîationnaire
29
/■ l
l
U
0
Pente 1 /r.
/
u
d
u
,
u
K]
b)
a)
Fig. 1,40.
i) Hypothèse 1 : la diode est bloquée
L'équation de sa caractéristique est donc / = 0 , avec U < Ud ■ On en déduit :
f/ = /?f-X = 20V > Ud
ce qui absurde, puisque la diode est supposée bloquée ; cette hypothèse est donc incorrecte.
ii) Hypothèse 2 : la diode est passante
L'équation de la caractéristique est la suivante :
/=
U-Ud
Vérifions, par la résolution algébrique, que / > 0 ou que U > Ud :
T
î=
U-Ud
r
„
=T
i
U
Ri
On trouve f/ = 0,98 V >
A, ^
d ou
Tr
U =
Rg-i
(TUd\
XH
et
Ri + n V
n )
.
U-Ud
Ril-Ud
/ =
=
n
Rt + r,
et / = 19 mA > 0 ; c'est la bonne hypothèse.
V. — ASPECTS ENERGETIQUES EN REGIME STATIONNAIRE
V. 1. — Bilan d'énergie
Considérons un dipôle AB convertissant en travail électrique de l'énergie qu'il reçoit d'une source
d'énergie, d'origine électromagnétique, chimique ou autre. Soumis à une tension Uab entre ses bornes,
il est parcouru par un courant d'intensité Iab ■ Appliquons, aux porteurs de charge électrique du dipôle,
le théorème de l'énergie cinétique (cf. Mécanique). Il vient :
à.£k
?
—j-y = UabUB — RIAB + EIAB
où Uab^ab est la puissance électrique reçue par le dipôle, due à la présence d'un champ électrique dans
le conducteur, Vj = —RJ\b
puissance perdue par effet Joule et EIAB la puissance reçue par le dipôle
en raison de la conversion (cf. Électromagnétisme). Comme la variation élémentaire d'énergie cinétique
d 6^ ^st nulle en régime stationnaire, il vient :
UabIab — RIab + ^ab — 0
d'où
UabIab — RIab
^ab
1. Lois de base des circuits en régime stationnaire
30
Pour effectuer le bilan énergétique sur un circuit ne comportant qu'une seule maille formée de plusieurs
dipôles, il suffit d'écrire de telles relations pour tous les dipôles et de sommer. Il vient, en utilisant
l'indice k pour étiqueter les différents dipôles, / étant l'intensité commune dans le circuit :
RJ2 - Fr-/ = /
=
k
k
t/A = O
puisque
^
k
k
=o
d'après la loi des mailles. Retenons donc que, dans un circuit, la somme des puissances reçues par
l'ensemble des dipôles est nulle, ce qui donne :
5>/ = 5>/2
k
k
Exemple : effectuons le bilan énergétique dans le circuit simple de la figure 1.41 dans lequel une pile,
de f.e.m E = 1,5 V et de résistance interne r = 2,0 Xî , alimente une lampe électrique, de résistance
R = 20 H. En appliquant la loi des mailles, on obtient l'intensité du courant dans le circuit, et les
différentes puissances mises en jeu :
/=
= 68.2mA
d'où
i?/2 = 93 mW
£7 = 1,5x68,2 = 102,3 mW
r/2 = 9. 3 mW
20 + 2
On voit que la puissance de conversion est dissipée par effet Joule, d'une part dans la résistance de la
lampe, d'autre part dans la résistance interne de la pile.
*■
Pile
U
Lampe
électrique
FlG. 1.41.
V. 2. — Puissance électrique maximale fournie par un générateur
Pour un générateur réel, de f.e.m E et de résistance interne Ri, débitant dans une charge résistive,
de résistance R, cherchons à connaître la valeur de R pour laquelle la puissance dissipée est maximale
(Fig. 1.42a). Cette question est essentielle lorsque le générateur est de faible puissance.
La puissance dissipée par la charge a pour expression :
^
r, r?
V = RE —
RE2
—
{R + Rif
■
puisque
r
"
F
/=
R + R,
Elle passe par un maximum pour :
2
dV
./? + £,•-2/?
y Ri - R
7 (R + Ri) - 2RiR + Rj)
1
—— = E ————-7
^4 ^ lJ =E2 ,
=£ ^i
tt = 0
3
dR
{RE Ri)
(R + R,)
(R + R,)3
soit
R = Ri
car V est une quantité positive qui s'annule pour R nul et pour R tendant vers l'infini. Sur la figure
1.42b, on a représenté le graphe ■p(R) ; on voit que la puissance dissipée maximale et la tension aux
bornes de la charge valent respectivement :
Lois de base des circuits en régime sîationnaire
31
V(R)
I
HlL
ARi
E
R
Ô1
%
R
b)
a)
FIG. 1.42.
Lorsqu'une telle condition de transfert maximal de puissance est réalisée, on dit qu'il y a adaptation de
résistance. Notons que cette adaptation peut être un inconvénient, car la résistance interne du générateur,
une pile par exemple, dissipe alors la même puissance, ce qui peut conduire à un échauffement interne
pouvant limiter sa durée de vie.
Remarque : Comme nous le verrons, ce résultat s'étend aux régimes quasi stationnaires sinusoïdaux
(cf. chapitre 2). Il est souvent important de récupérer une puissance maximale lorsque les
générateurs sont de faible puissance comme dans un microphone ou une antenne de télévision, car toute atténuation supplémentaire d'un signal déjà faible, dégrade considérablement la qualité du signal de sortie. Dans ce contexte, les générateurs basse fréquence utilisés en travaux pratiques possèdent en général une résistance interne de l'ordre de 50 H,
bien plus faible que celle de la charge dans laquelle on les fait débiter ; on évite ainsi une
trop grande dissipation d'énergie dans le générateur.
V. 3. — Transport de la puissance électrique
Analysons le transport de la puissance électrique fournie par un générateur, de f.e.m E et de résistance interne r, vers une charge de résistance Rc , via une ligne ohmique de résistance R{ (Fig. 1.43).
FIG. 1.43.
La puissance fournie par le générateur et celle reçue par la charge ont pour expressions respectives :
V8 = Uî
et
Vc = Ucî
avec
UC = U - Rd
U étant la tension à la sortie du générateur, Uc la tension aux bornes de la charge et I l'intensité du
courant dans la ligne. Exprimons le rendement de l'installation en fonction de Ri, Vg et U :
=
~
'Pc
=
=
vs
Pg - Ri'1
Rtl1 _ ,
— = 1
Vg
RVz
L
u*
32
1. Lois de base des circuits en régime sîaîionnaire
Ainsi, pour une résistance de ligne fixée et une puissance électrique déterminée à transmettre, le rendement du transfert est d'autant plus proche de l'unité que la tension de distribution est plus grande.
Remarque : On retrouvera ce résultat en régime quasi stationnaire sinusoïdal (cf. chapitre 2). C'est
la raison pour laquelle la puissance électrique est transportée par des lignes à très haute
tension (225 et 400 kV).
CONCLUSION
Retenons les points essentiels.
1) Dans les circuits électriques, les dipôles électrocinétiques sont qualifiés de récepteur ou de générateur électrique, suivant que la puissance électrique reçue est positive ou négative. En régime stationnaire, cette puissance s'écrit, pour un dipôle AB :
V = Uï
avec
U = Uab
et
/ = IAb
Cette algébrisation n'est pas superflue, car certains dipôles peuvent se comporter en récepteur ou en
générateur, suivant les conditions de fonctionnement.
2) La caractéristique d'un dipôle exprime la relation entre la tension à ses bornes et le courant qui
le traverse. Elle met en évidence les propriétés du dipôle, notamment sa linéarité ou sa non-linéarité.
Nous l'avons écrite systématiquement sous la forme I{U), avec la convention récepteur, dans laquelle
on compte positivement la puissance électrique reçue.
11 est utile de reconnaître les graphes des caractéristiques idéalisées des principaux dipôles : résistors, diodes, générateurs électriques, etc.
3) L'état électrique des circuits est déterminé par les deux lois de Kirchhoff, la première relative
aux nœuds, la seconde aux mailles d'un circuit :
^ £kh = 0
et
ekUk = 0
La première sommation porte sur toutes les branches qui concourent an nœud considéré, avec
= 1 si
le courant est orienté vers le nœud et
= — 1 sinon. La seconde concerne tous les dipôles d'une même
maille, avec ek = 1 si le sens de Uk est le même que le sens d'orientation de la maille et £k = — 1
4) Le théorème de Millman, qui est une simple réécriture de la loi des nœuds en tenues de tension,
est très commode et très efficace, dès que l'on cherche un rapport de tensions. De même, les diviseurs de
tension ou de courant, qui se déduisent aisément des lois de Kirchhoff, sont très utiles pour une gestion
technique rapide de l'état électrique des circuits.
5) Sur le plan énergétique, la somme des puissances électriques algébriques reçues par les dipôles
d'un circuit est nulle. En outre, la puissance fournie par un générateur à un résistor est maximale lorsque
la résistance du second est égale à la résistance interne du premier.
Lois de base des circuits en régime sîationnaire
33
EXERCICES ET PROBLEMES
PI-1. Caractéristiques d'une association de dipôles Cwëb>
(Solution : http ://www.ast.obs-mip.fr/perez)
Tracer la caractéristique des dipôles équivalents aux groupements de la figure 1.44, sachant que les
diodes sont idéales.
R
^>i--i
H-
R
R
-t>-
-c
a)
b)
d)
c)
R
-w-
£o
^o.
X
R
X
R
-0-
R
e)
g)
f)
rCD'1
Xo
h)
-W£o
-w-
i)
j)
Fig. 1.44.
PI- 2. Mesure de la résistance interne d'un générateur
Afin de déterminer la résistance interne d'un générateur, on réalise une première mesure à l'aide
d'un voltmètre, de très grande résistance interne. On relève une tension U\ = 22,0 V . On ajoute alors
un résistor, de résistance de /? = 47 H, en parallèle, et on relève une tension Ui — 19,5 V.
Déterminer la f.e.m du générateur, ainsi que sa résistance interne en fonction de R, U\ et U2 ■
Application numérique.
PI- 3, Modélisation de diodes
Les dipôles, dont la caractéristique est rectiligne par morceaux, peuvent être remplacés, sur chaque
partie de leur caractéristique, par une association en série ou en parallèle de dipôles idéaux simples.
1. Pour une diode réelle, de tension de seuil Ud et de résistance interne Ri, déterminer l'association en série équivalente à cette diode en mode passant. Quelle est l'association en parallèle équivalente ?
2. Reprendre la question précédente pour une diode Zener, caractérisée en mode passant direct par
une tension de seuil Ud et une résistance interne /?,, et en mode passant inverse par une tension Zener
Uz et une résistance interne X-.
34
1. Lois de base des circuits en régime stationnaire
PI- 4. Batterie tampon
Dans le schéma de la figure 1.45, E\ > E2 et le dipôle étudié V a une résistance R.
1. Déterminer le type de fonctionnement des deux générateurs, en fonction de R .
2. On suppose que la f.e.m Eo du générateur 2 est constante, et que la f.e.m du générateur 1 varie
entre E\ im et
■ La résistance R étant fixée, trouver la valeur de R] telle que le courant débité par
le générateur 2 soit nul, lorsque Ei est maximal.
3. En calculant l'intensité I du courant dans le dipôle V, montrer que la présence du générateur
2 permet de diminuer l'influence des variations de E\ sur I. Application numérique pour E\ variant
entre 6,0 et 7,0V, R = 100 fi, E2 = 1,5V et R2 = 1.0 fl.
h
E
-i—
E
R,
o
R
mA
v
Ohramètre
Rt
X
T
FlG. 1.45.
FIG. 1.46.
PI- 5. Ohmmètre analogique
Un ohmmètre est constitué par l'association en série d'un résistor de résistance R. d'un générateur
de f.e.m £" = 9,00 V et d'un milliampèremètre de résistance interne Ra = 100 O. Ce dernier est
connecté sur le calibre 1m = 10,0 mA (Fig. 1.46) et son écran comporte 100 divisions. On le branche
sur un résistor de résistance X.
1. Trouver R afin que la déviation soit maximale lorsque X est nul.
2. a) Pour X 7^ 0, la déviation de l'aiguille du milliampèremètre est de n graduations. Donner X
en fonction de E, Îm et n .
b) Quelles sont les valeurs de X correspondant aux différentes valeurs de n (de 10 en 10 ) ?
3. Pour quelle valeur de X l'incertitude sur n est-elle minimale ?
PI- 6. Application simple du théorème de Millman
A l'aide du théorème de Millman, calculer, en volt, la tension entre le nœud N et la masse M dans
le montage de la figure 1.47.
Retrouver ce résultat en appliquant ce même théorème à la masse du montage.
£, = 12 V
R, = 1 kfi
/?3 = 3 ka
H
I-£3 = 18 V
N
R2 = 2 ka
R4 = 4 ka
FIG. 1.47.
£2 = 24 V
Lois de base des circuits en régime sîationnaire
35
PI- 7. Circuit comportant une diode
Dans le circuit de la figure 1.48. le générateur de tension a une f.e.m E et le générateur de courant
a un c.e.m constant J. La diode présente une tension de seuil Ua et une résistance interne R'.
1. Déterminer f/ et / en fonction de E, X ,Ri, R, Uj et R'.
2. Calculer U et I pour E — 1,5 Y, I — 100 mA, Ri = 10 Ù, R = 10 H , ^ = 0. 8 V et
r' = 15 n.
3. La puissance maximale que peut dissiper la diode est de 0, 1 W. Convient-elle pour le montage
précédent ?
C
E
T/
X
R
U
B/
xz
F
D
Ri
4 /
FlG. 1.48.
/
FlG. 1.49.
PI- 8. Résistance équivalente à un cube de résistors
La résistance de chaque segment du cube de la figure 1.49 est égale à R .
1. Déterminer en fonction de /?, la résistance du dipôle équivalent, lorsque le cube est alimenté
entre les points A et F. Application numérique pour R = 220 O .
2. Même question lorsque le cube est alimenté entre les points A et H. Application numérique.
PI- 9. Résistance par carré d'une interconnexion
En électronique hyperfréquence, il est nécessaire de prendre en compte très précisément remplacement de chaque composant ; en outre, on ne peut négliger la résistance du matériau sur lequel sont gravés les composants. L'évolution des technologies conduit à des épaisseurs de conducteur de plus en plus
petites, de l'ordre de 0,25 ixm . Afin d'obtenir des résultats indépendants de la technologie, il est commode de découper le support en portions dont la longueur est égale à la largeur ; la résistance Rp d'une
portion est appelée résistance par carré du matériau considéré.
1. Rappeler l'expression de la résistance d'un conducteur parallélépipédique, en fonction de la
conductivité y d'un matériau, sa longueur / et sa section rectangulaire, de côtés a et e (Fig. L50a). En
déduire Rp pour trois matériaux différents, d'épaisseur c = 0.25 jxm, aluminium, cuivre et tungstène,
de conductivités respectives :
y ai = 3,65 x 107 S-mr'
rcM
= 5,8 x K^S-m-'
yw = 1,88 x 107 S-m"1
2. L'introduction des résistances par carré permet de déterminer la résistance d'une portion de
substrat en se ramenant à un réseau discret et symétrique de résistances identiques. Ainsi, une portion
de substrat peut se ramener au réseau de résistances de la figure 1.50 b, où chaque résistance vaut Rp .
a) Sachant que l'alimentation électrique s'effectue entre les points A et F, déterminer la résistance
du substrat.
b) Exprimer la résistance d'une bande de substrat, de longueur très grande devant sa largeur
(Fig. L50c).
1. Lois de base des circuits en régime stationnaire
36
-c=^-
B
a)
B
b)
c)
FIG. 1.50.
PI-10. Étude d'un circuit symétrique et d'un circuit antisymétrique -weta
Dans le circuit représenté sur figure 1.51a, les diodes sont idéales.
1. Trouver l'intensité du courant qui parcourt chaque diode.
2. Cette portion de circuit est maintenant alimentée comme le montre la figure 1.51b. Calculer la
nouvelle intensité dans chaque diode.
3. Reprendre la question précédente avec le circuit des figures 1.51c et 1.51d.
.
I "
T
2R
R
2R
1
T
2R
2R
R'
R'
y
R
E
R
E
£|
E
R
E
d)
n—
a)
b)
T
T
î
2R
2R
2R
S
E
C)'
R/2
2R
E
CD*
R/2
E
:
:
4R
Rjl
2R
4R
d)
2R
Ex
R
c)
d)
Fig. 1,51.
R/2
E
*
37
Lois de base des circuits en régime sîationnaire
PI-11. Montages courte et longue dérivations
Le montage, représenté sur la figure 1.52, permet de tracer la caractéristique d'un dipôle ; selon la
position de l'interrupteur K, le montage est courte dérivation (position C ) ou longue dérivation (position L ). En général, l'ampèremètre possède une résistance Ra très faible et le voltmètre une résistance
Rv très grande.
L Le dipôle est un conducteur ohmique, de résistance R .
a) Déterminer pour chaque position de l'interrupteur K, la résistance mesurée Rm = U/I en
fonction de R, Ra et Rv où U est la tension lue sur le voltmètre et I l'intensité lue sur l'ampèremètre.
b) En déduire l'erreur systématique relative àR/R = (Rm — R)/R pour les deux montages.
c) Préciser, selon la valeur de R, le. meilleur choix pour l'interrupteur K .
I
Dipole
e
r
Vv*'
—
/t—1
u
FIG. 1.52.
2. On utilise ce montage pour déterminer la caractéristique d'une diode. Pour la diode branchée
dans le sens direct, on a rassemblé les valeurs mesurées dans le tableau 1.1.
I (mA)
0
0,2
1,0
4,0
10,0
13,0
KenC
U{V)
<0,5
0,54
0,57
0,67
0,87
0,97
KenL
U (V)
<0,5
0,55
0,65
0,97
1,62
1,95
Tab. 1.1.
a) Tracer les deux caractéristiques sur un même graphe. Quel est le montage le plus adapté à l'étude
de la diode passante ?
b) En assimilant la caractéristique à deux portions de droite, déduire la tension de seuil et la résistance interne de la diode. Déterminer la résistance interne de l'ampèremètre.
3. Pour la diode branchée en inverse, on a relevé les valeurs rassemblées dans le tableau 1.2 ;
f/(V)
K en C
K en L
-5
-10
-20
8
-5
10
-20
8
-0,01
10 x / (A)
10 x / (A)
-0,01
-0.01
Tab. 1.2.
Quel est le montage le plus adapté à l'étude de la diode connectée en inverse ? Trouver la résistance
interne du voltmètre.
1. Lois de base des circuits en régime stationnaire
38
PI- 12. Alimentation d'un train 5®^
Les moteurs électriques de locomotrices fonctionnent en régime stationnaire, sous une tension de
1500 V pour le TGV-sud et 750 V pour les réseaux urbains. L'alimentation s'effectue grâce à des sousstations qui abaissent la tension fournie par une ligne haute tension ( 3 000 V ) à la tension d'utilisation
1 500 V ou 750 V. Ces sous-stations sont réparties régulièrement le long de la voie et leur espacement
dépend du trafic de la ligne considérée, de 8 à 15 km . Il existe deux alimentations possibles. Tune dite
bilatérale et l'autre en parallèle (Fig. 1.53).
B Fil de court-circuit
Caténaire
1
E
)
®'
M
U
m ^
Xm»
1
D
Rail
Rail
D
b)
a)
Fig. 1.53.
Nous nous proposons de comparer ces deux modes d'alimentation sur un modèle simple. Le moteur
de la locomotrice est branché entre les rails et la caténaire, qui est le fil aérien surplombant les rails.
L'intensité du courant stationnaire qui parcourt le moteur est Xm et est indépendante de la tension à
laquelle il est soumis ; aussi peut-on représenter le moteur par un générateur de courant idéal de c.e.m
Xm . La résistance linéique de la caténaire est Ri (une longueur x de caténaire a donc une résistance
xRi ) ; les rails ont, eux, une résistance négligeable en raison de leur grande section.
1. En alimentation bilatérale, les sous-stations sont assimilées à des générateurs de tension parfaits,
de f.e.m E, répartis régulièrement et distants de D (Fig. 1.53a). On ne s'intéresse qu'à la portion entre
deux générateurs successifs. On désigne par x la distance entre la locomotrice et le premier générateur.
a) Déterminer, en fonction de x, la tension aux bornes du moteur Um .
b) En déduire la chute de tension aux bornes du moteur, AL = E —
, en fonction de x.
c) Trouver la valeur maximale Dm de D , sachant que la chute de tension maximale acceptable est
AUm • Application numérique pour AUm = 150 V et
= 1 400 A ; la caténaire est constituée d'un
fil de cuivre, de 300 mm2 de section, dont la résistance linéique vaut R[ = 4,2 x 10-5 fl • m-1 .
d) Effectuer un bilan de puissance.
2. En alimentation parallèle, on utilise deux lignes court-circuitées au milieu du tronçon (Fig 1.53b).
a) Déterminer la tension fournie au moteur en fonction de x. On notera que les points A et S sont
au même potentiel ; il est donc possible de les relier par un fil de résistance négligeable, sans modifier
le circuit.
b) En déduire la nouvelle valeur DM . Application numérique.
PI-13. Mesure de température
Le pont de Wheatstone, représenté sur la figure 1.54, est alimenté par un générateur de tension
parfait de f.e.m E. L'ampèremètre a une résistance interne Ra .
Lois de base des circuits en régime sîationnaire
39
h
T—■*—
"1
Ra
A
E
A V
R2
" B
/?3
I
FlG. 1.54.
1. Déterminer l'intensité / du courant qui traverse F ampèremètre.
2. Etablir la condition d'équilibre du pont.
3. Sachant le dipôle 1 est une thermistance dont la résistance varie avec la température selon :
/?, = /?n
—
et que
est une résistance réglable que l'on peut modifier jusqu'à l'équilibre du pont, exprimer la
température T de /?] , en fonction de Rq , R2 , R3 , ^4 et Tq .
4. Initialement, le pont est équilibré pour T = Tq . On porte R\ à la température Tq + AT.
La valeur de R\ devient alors i?o(l + e) avec e -C 1 . L'intensité minimale détectable étant
/m = 0,1 fxA, détenuiner le plus petit écart de température décelable autour de 7" = 300 K. On
donne /?2 = /?3 = /?4 = 1 000 H, £ = 10 V et /?fZ est négligeable.
PI-14. Modulateur en anneau
La figure 1.55a représente un modulateur dit en anneau ; sur la figure 1.55b, qui en donne une vue
en perspective, on peut apprécier les symétries du circuit. Les quatre résistances R sont identiques ainsi
que les quatre éléments V\ , î>2 , X>3 et D4 ; ces derniers sont des dipôles passifs non symétriques
et non linéaires, par exemple des diodes. L'orientation de la pointe du triangle qui représente l'un de
ces dipôles, permet de préciser le sens de branchement des bornes. Un générateur, connecté entre Ai
et £1, impose une tension U[ . Un autre générateur, branché entre A2 et Bi, impose une tension Ui.
Les branchements extérieurs au modulateur sont représentés sur la figure 1.55c. On désigne par U la
tension qui apparaît entre a et /?. On réalise avec ce circuit les quatre opérations indépendantes A , B,
C et D suivantes :
i) opération A : on court-circuite les points A2 et B2 : U2 = 0 et U{ yé 0,
H) opération B : on court-circuite les points A] et Si : Uj = 0 et f/2 / 0,
iii) opération C : le modulateur étant invariant par rotation d'un demi-tour autour de l'axe A[—B\ ,
on fait subir aux intensités une rotation d'un demi-tour autour de l'axe de symétrie,
iv) opération D : le modulateur étant invariant par retournement de chaque dipôle et de chaque
résistance, suivi de la symétrie par rapport au plan A1S1A2S2 , on transforme les intensités comme
précédemment.
1. Dessiner le circuit après la transformation A . Que vaut alors U ?
2. Quel est le circuit après la transformation S ? En déduire U.
3. Détenuiner, après la transformation C, les valeurs des nouvelles tensions U\ , U'j et U', en
fonction des anciennes U\ , U2 et U.
1. Lois de base des circuits en régime stationnaire
40
V
[>
2>z
^1
b
.
.
■V3
f/l
B\
V.
B2
A
Bi
>
Va
■à)
b
C)
Fi g. 1.55.
4. Exprimer, après la transformation D, les valeurs des nouvelles tensions U[', U'd et U" en
fonction des anciennes U\ , U2 & U ■
5. Pour de petites valeurs de U\ et U2, on suppose que U est bien représenté par le développement :
U — ci\U\ -f- <22^2 ~b
"b /22C/1U2 d- ^3^2
C] L/J + C2U^ U2
c^Ui
+ C4U2
En utilisant les opérations A , B, C et D, montrer que certains coefficients sont nuls. Quelle est
la fonction d'un tel dispositif?
2
Lois de base des circuits
en régime quasi stationnaire
Nous nous proposons dans ce chapitre de généraliser l'étude faite sur les signaux stationnaires aux
signaux lentement variables au cours du temps. Ces derniers sont essentiels, car, pour la plupart des
signaux considérés dans les circuits électroniques, seule la partie variable au cours du temps contient
l'information intéressante ; la composante stationnaire, définie par les alimentations, fixe seulement le
point de fonctionnement des composants.
I. — LOIS DE KIRCHHOFF EN RÉGIME QUASI STATIONNAIRE
I. I. — Approximation des régimes quasi stationnaires
La vitesse de variation des signaux sépare l'étude des circuits électroniques en deux domaines
distincts :
i) Si les signaux sont de variation lente, c'est-à-dire si la dimension l du circuit est très faible devant la longueur d'onde A du rayonnement électromagnétique associé à leur fréquence (cf. EJectromagnéîismé), il est possible de représenter les composants du circuit par une association de dipôles séparés
par des fils de connexion. C'est l'approximation des régimes quasi stationnaires, brièvement l'ARQS,
que l'on traduit aussi par une durée caractéristique de la variation d'une tension ou d'un courant, très
grande devant la durée de propagation du signal d'un point à l'autre du circuit.
Exemples : pour la fréquence 50 Hz de la tension sinusoïdale d'alimentation du réseau de distribution électrique qui alimente un montage, on a A = c/f ~ 6000 km et / ~ 1 m . Pour une fréquence de
100 MHz, typique d'un signal radioélectrique en modulation de fréquence, on trouve : A ~ c/f
3m,
alors que la longueur des circuits des postes récepteurs n'excède pas quelques centimètres.
ii) Si les signaux varient trop rapidement (domaine des micro-ondes ou des hyperfréquences), l'analyse est totalement différente, car elle exige la connaissance exacte de la position de chacun des éléments
du circuit, la longueur des conducteurs entre les éléments du circuit jouant un rôle décisif en raison de
l'influence non négligeable de la propagation des ondes électromagnétiques d'un point à l'autre du circuit. C'est ce que l'on observe dans les antennes qui se présentent comme des circuits ouverts parcourus
par des courants ! (cf. Électromagnétisme).
Exemple : pour les signaux reçus par les récepteurs paraboliques, dont le diamètre est de quelques
dizaines de centimètres, l'ARQS n'est plus valable, car les fréquences sont de l'ordre de plusieurs GHz :
A = c/f ~ 3 cm .
Dans la suite, nous limitons l'étude à celle des signaux lentement variables.
42
2. Lois de base des circuits en régime quasi sîationnaire
Remarque : Notons que certains signaux, qui ne semblent pas vérifier l'ARQS, comme les échelons
de tension délivrés par un générateur de signaux carré, sont cependant traités dans cette
approximation. En effet, le saut de tension n'est pas instantané, puisque le passage de
0 à £0 s'effectue en une durée très courte. L'ARQS décrit bien la réalité si cette durée
de montée est longue devant la durée de propagation du signal. Dans la suite, nous nous
placerons dans l'ARQS, tout en négligeant la durée de montée, ce qui revient à assimiler
le signal carré réel au signal théorique.
1.2. — Lois de Kirchhoff
Comme tous les effets dus à la propagation d'un signal sont négligés dans l'ARQS, il est légitime
de conserver le concept de courant dans une branche ou dans un dipôle : l'intensité dans une branche
est la même en tout point de cette branche, à tout instant. De même, la notion de différence de potentiel
et de tension aux bornes d'un dipôle est conservée (cf. Électromagnétisme).
Pour les notations en régime variable nous nous confonnons à l'usage international : les lettres
minuscules i ou i{î) et u ou u{t) désignent l'intensité du courant et la tension à l'instant t.
Retenons donc que les lois des nœuds et des mailles en régime stationnaire, se transposent directement en régime variable dans l'ARQS.
a) Loi des nœuds
La somme algébrique des courants concourants en un nœud est nulle :
^2 £kik
k
= 0
où F on compte positivement les courants orientés vers le nœud ( Sk — 1 ) et négativement les courants
orientés vers tout autre nœud (
= — 1 ). La sommation sur k porte sur toutes les branches arrivant au
nœud considéré.
b) Loi des mailles
La somme algébrique des tensions aux bornes des branches d'une maille décrite dans un sens
arbitraire est nulle :
^
g
^5
fM
(5)
E^=o
^
Ici, £k = 1 si les tensions ont le même sens que celui choisi sur la maille et
contraire.
= — 1, dans le cas
1.3. — De nouveaux dipôles en régime variable
En régime variable, de nouveaux dipôles apparaissent (cf. Électromagnétisme) : les circuits comportent toujours des résistors, des diodes, mais aussi des générateurs variables (de tension ou de courant), des bobines et des condensateurs.
a) Générateurs variables
En régime variable, les générateurs sont représentés comme en régime stationnaire, mais il faut
préciser la nature du signal délivré, par exemple un signal sinusoïdal, un signal de fonne carrée, ou un
signal en forme de marche appelé échelon (Fig. 2.1).
Lois de base des circuits en régime quasi sîationnaire
43
; u(t) -©^
u(t)
u(î>
JT
t
0
0
t
FIG. 2.1.
Les générateurs utilisés dans 1" ARQS sont les GBF (Générateurs Basse Fréquence) dont la plupart
sont capables de délivrer des signaux de formes variées et de fréquence et d'amplitude réglables par
l'utilisateur.
b) Condensateurs
Un condensateur idéal est caractérisé par sa capacité C, qui est le coefficient de proportionnalité
entre la charge q de l'une de ses armatures, par exemple A , et la tension à ses bornes (cf. Electromagnétisme) :
q,\ = Cuab
ou
q — Cu
Notons sur la figure 2.2 les conventions adoptées : l'extrémité de la flèche de tension pointe l'armature
A dont la charge est q. Dans ces conditions, on a, pour l'intensité du courant qui est orienté vers cette
armature :
—
ét
r—
dr
d ou
Remarques : 1) En régime stationnaire, un condensateur se comporte comme un interrupteur ouvert,
c'est-à-dire un coupe-circuit.
2) La charge de l'armature du condensateur est une grandeur continue, tout comme la
tension à ses bornes, ce qui se justifie par la continuité de l'énergie électromagnétique du
condensateur (cf. chapitre 4).
i{î) 4(0
—>—
-4(0
B
00
—>—
"(0
«(0
FIG. 2.2.
FIG. 2.3.
c) Bobines
Une bobine idéale est caractérisée par son inductance L, qui est le coefficient de proportionnalité
entre la tension à ses bornes et les variations temporelles du courant qui la traverse (cf. Électromagnétisme) :
Tdi
u = L—
ét
La convention adoptée pour la tension et le courant est explicitée sur la figure 2.3.
44
2. Lois de base des circuits en régime quasi stationnaire
Une bobine réelle est généralement bien représentée, jusqu'à des fréquences de quelques kHz,
par l'association d'une bobine idéale en série avec un résister représentant la résistance du bobinage
(cf. chapitre 7).
Remarques : 1) En régime stationnaire, une bobine idéale est équivalente à un court-circuit et une bobine réelle à la seule résistance de son bobinage.
2) Tout comme la charge de l'armature d'un condensateur, l'intensité du courant dans une
bobine est une grandeur continue (cf. chapitre 4).
II. — SIGNAL SINUSOÏDAL EN NOTATION COMPLEXE
II. 1. — Importance du régime sinusoïdal
Les signaux sinusoïdaux basse fréquence ont une importance considérable dans la pratique, cela
pour plusieurs raisons :
i) ils sont faciles à réaliser (alternateurs, générateurs basse fréquence, etc.), transportables sur de
longues distances, sans grandes pertes, pourvu que l'amplitude de la tension soit suffisamment élevée,
y
ce que l'on réalise aisément à l'aide de transformateurs ; ainsi, le distributeur français EDF (Electricité
De France) fournit un courant sinusoïdal de fréquence 50 Hz, alors qu'en Grande Bretagne et aux USA,
la fréquence du réseau de distribution électrique est 60 Hz ;
ii) en outre, l'étude des circuits est particulièrement simple avec des signaux sinusoïdaux, puisque
ces signaux conservent leur forme, lorsqu'on les dérive par rapport au temps ou lorsqu'on les intègre ;
iii) enfin, un signal électrique quelconque est équivalent à une somme de signaux sinusoïdaux. Par
exemple, l'étude d'un circuit linéaire, siège d'un signal périodique carré, peut se ramener à celle de
signaux sinusoïdaux dont les fréquences sont des multiples entiers d'une fréquence fondamentale (cf.
annexe 2). La réponse obtenue est la somme des réponses relatives à chaque signal sinusoïdal.
Pour cette dernière raison, nous limitons notre analyse aux circuits constitués de résistors, de bobines, de condensateurs et de générateurs sinusoïdaux (de courant ou de tension).
II. 2. — Du régime transitoire au régime établi
Observons, sur l'exemple concret simple d'un circuit associant en série, un générateur de signaux
sinusoïdaux, un résistor et un condensateur, l'évolution de la tension iicit) aux bornes du condensateur
(Fig. 2.4a).
eitlUfiî)
R
ii
/
Régime transitoire
Régime établi
b)
Fig. 2.4.
Lois de base des circuits en régime quasi staîionnaire
45
La figure 2.4b représente l'enregistrement de la tension uc{t) obtenue sur un oscilloscope à mémoire ; ce dernier a permis d'enregistrer uc{t), à partir de l'instant pris comme origine ( ? = 0 ) où l'on
ferme le circuit.
On constate que le signal devient sinusoïdal, avec la même fréquence que l'excitation, après une
durée relativement courte : la première phase durant laquelle le signal n'est pas sinusoïdal forme le
régime transitoire ; dans la seconde, le signal est sinusoïdal de fréquence identique à celle du générateur.
On dit que le circuit a atteint le régime établi (cf. chapitre 3).
Retenons le résultat expérimental suivant, que l'on justifiera ultérieurement (cf. chapitres 3 et 4) :
quel que soit le signal sinusoïdal fourni par le générateur, après la fermeture de l'interrupteur, les tensions et courants, en tout point d'un circuit linéaire, sont aussi sinusoïdaux, avec la fréquence du signal
du générateur.
II. 3. — Notation complexe des grandeurs électriques sinusoïdales
a) Signal analytique associé à un signal réel
Pour étudier les circuits en régime variable, nous venons de voir que nous pouvons nous limiter à
l'étude des signaux sinusoïdaux. Pour ces signaux sinusoïdaux, il est très commode d'associer, à chaque
variable sinusoïdale s{t) = smcos(cot -)- (f)x), la variable complexe s{r) appelée signal analytique
correspondant (cf. chapitre 15) ;
s(t) = Re{*(/)}
avec
s{r) = sm exp(/(//) exp(/W) = s/tl exp(/W)
sm = sm exp(J(f)) étânt l'amplitude complexe et j le nombre imaginaire tel que j2 = — 1. Évidemment,
toutes les informations sur s{t) sont contenues dans s{t) : l'amplitude sm de .ç(ï) est le module de
5(if), sa phase cot + cf) est l'argument de jr(r) .
Remarque : Pour éviter toute confusion avec l'intensité i d'un courant, en électronique on désigne par
j le nombre complexe tel que y2 — — 1,
h) Intérêt de la notation complexe
Un premier intérêt de la notation complexe est la simplification des équations à résoudre pour
déterminer l'état d'un circuit en régime sinusoïdal. En notation complexe, une dérivation par rapport au
temps se traduit par une simple multiplication de la grandeur complexe par jto :
às _ d^expOO] _ ,
=
dt
=joJsmexV(jcot)=jios
et
—
De même, une intégration se traduit par une simple multiplication par 1 /(Jco) :
f s dt = f s m expijcot) dt = -7-sm exp (jmt) + Cte =
^ + Cte
J
J
}(*>
Les équations différentielles linéaires se ramènent ainsi à des équations algébriques simples. Par
exemple :
d s
1 d,?
— — + ù)q s = em cos(ruf)
Te dt
donne
d~ s
1 d .y
—^ H
— + coç, s = em expijcot)
drt
Te dt
avec s = sm expijcot). Il vient, après simplification par expijcot) :
/
o
I ~or
\
•w
T«
2
em
soit
s,n =
^
;—
y
-byru/r, + ru2
On en déduit facilement la solution s{t) du régime établi en prenant la partie réelle de s[t) :
s{t) = Re{.ç} = Re{.çw exp(/0) expijcot)} = sm cos{cot + cb) avec sm =
et é = arg{^
2. Lois de base des circuits en régime quasi stationnaire
46
Un second avantage de la notation complexe est qu'elle permet de comparer très facilement deux
grandeurs dans un circuit. En effet, soit x{t) et y{t) deux grandeurs réelles, de même pulsation, que
l'on souhaite comparer en amplitude et en phase. Le rapport des amplitudes réelles est tout simplement
égal au rapport des modules et le déphasage (f> de y par rapport à x est l'argument de y/x :
yjn
et
X/it
(}) = (j)y — (f)x
On note que si
est positif, alors la grandeur y est en avance sur la grandeur x. Le nombre complexe y/x fournit donc tous les renseignements nécessaires pour comparer y(f) à x{t) . Deux grandeurs particulièrement intéressantes à comparer sont précisément l'intensité i{t) du courant sinusoïdal,
qui traverse un dipôle, et la tension u(t) à ses bornes.
c) Représentation de Fresnel
La représentation de Fresnel d'un nombre complexe z = a + jb, attribuée au physicien français
A . Fresnel, est la représentation géométrique de ce nombre dans un plan cartésien Oxy, Ox étant l'axe
des réels et Oy l'axe des imaginaires. Le point A , qui représente le nombre complexe z, est tel que la
norme du vecteur OA est égale au module de z et l'angle ( Ox, OA ) à l'argument de z (cf. annexe 1 ).
Si le nombre complexe décrit une tension sinusoïdale, d'amplitude um, de pulsation oj et de
déphasage à l'origine </>,« — iimcos(ù)t + 4>), alors le vecteur de Fresnel, de longueur un,, tourne
autour de l'origine O à la vitesse angulaire w ; à / = 0, ce vecteur fait l'angle
avec l'axe Ox
(Fig. 2.5).
y = Im {w U
Mt -y à)
a
x—
Re
{«m)
Fig. 2.5.
Il. 4. — Impédance d'un dipôle passif linéaire
Le concept d'impédance permet de comparer, en régime sinusoïdal, l'intensité du courant qui traverse un dipôle à la tension à ses bornes.
a) Définition
En régime sinusoïdal, Vimpédance d'un dipôle linéaire passif est le rapport entre les nombres
complexes représentant la tension à ses bornes et l'intensité du courant qui le traverse : Z = u/i.
Remarques : 1) Conformément à l'usage international recommandé, l'impédance est un nombre complexe que l'on ne souligne pas.
2) L'impédance n'a de sens qu'en régime sinusoïdal; ainsi, l'impédance offerte par un
dipôle, lorsque la tension à ses bornes est un signal carré périodique, n'a pas de sens.
Dans ce cas, on doit décomposer le signal en série de Fourier (cf. annexe 2) et définir une
impédance pour chacune de ses composantes (stationnaire ou sinusoïdale).
47
Lois de base des circuits en régime quasi staîionnaire
En régime sinusoïdal établi, m et / ont même pulsation, mais des phases respectives généralement
différentes (pu et (p-,. Par conséquent :
Z = = = ^ = \Z\ exp j(p
l
lm
avec
\Z\ = -pl
m
et
(p = (pu — (pi
Notons que Tirapédance d'un dipôle est indépendante du temps et qu'elle est homogène à une résistance ; elle s'exprime donc en ohm et (p , qui est le déphasage de la tension u par rapport à l'intensité i
du courant, s'exprime en radian dans le système international d'unités.
La partie réelle de l'impédance du dipôle est sa résistance R, la partie imaginaire est sa réactance X :
Z = R+jX
On définit également Vadmiîtance Y d'un dipôle, inverse de l'impédance :
Y=l- = lz
M
Z
d'où
1
Y= ,
- = \Y\ exp(-7»
\Z\ QXp{j(p}
avec
|F| = ~
\Z\
Le module de Y est l'inverse de celui de Z et sa phase est opposée à celle de Z. Sa partie réelle est la
condiictance G et sa partie imaginaire la susceptance B :
Y = G+jB
Remarques : 1) Puisque Y = 1/Z, les relations suivantes s'imposent : G = R^R1 + X2) et
B= -X/(i?2 + X2).
2) Comme nous le verrons, la résistance R d'un dipôle passif est toujours positive, alors
que la réactance est de signe quelconque. Ce résultat est relié à l'interprétation physique
de X (cf. Électromagnétisme). De même, la conductance G est toujours positive, alors
que la susceptance est de signe quelconque.
b) Impédances des composants usuels
En régime établi sinusoïdal de pulsation co , on associe à la tension u{t) aux bornes du dipôle et à
l'intensité i(î) du courant qui le traverse, respectivement :
u = um exp(/(£„) exp(/&>/)
et
i = im exp(;V>(-) expijcot)
i) Résistor
Pour un résistor, la relation entre u{t) et i{t) s'écrit simplement :
u = Ri
soit
u = Z^i
avec
Zr = R
L'impédance complexe d'un résistor est réelle, car le courant et la tension sont en phase ( ^ = 0 ) ; cette
impédance est indépendante de la pulsation co.
Remarque : Comme l'oscilloscope ne permet de visualiser que des tensions, on étudie l'évolution d'un
courant variable dans un circuit à partir de la tension aux bornes d'un résistor parcouru
par ce courant ; la courbe obtenue est en phase et proportionnelle au courant.
2. Lois de base des circuits en régime quasi stationnaire
48
ii) Condensateur idéal
Pour un condensateur idéal, de capacité C, la relation entre u{r) et i{r) est:
i =
dq
du
= C ——
dt
dt
car
q = Cu
Il vient, en régime sinusoïdal et en notation complexe :
i = jCtou
d où
u = Zci
avec
Zc =
1
JCÙ)
Ainsi, l'impédance complexe d'un condensateur idéal est un nombre imaginaire : le courant et la tension
sont en quadrature, précisément (p = — 7r/2 rad ; u est en retard de 7r/2 rad sur i.
Le module de l'impédance d'un condensateur idéal diminue quand la pulsation augmente. A très
basse fréquence, il devient très élevé : le composant se comporte comme un coupe-circuit. A très haute
fréquence, c'est l'inverse puisque le module de l'impédance est très faible : le composant est équivalent
à un court-circuit.
iii) Bobine idéale
Pour une bobine idéale d'inductance L, la relation entre u(t) et i(t) est :
di
u = L—
d'où
di
,
.
u = L-j-^ = jLcoi
.
soit
u = Zii
avec
Zi = jLco
L'impédance d'une bobine idéale est donc un nombre imaginaire ; le courant et la tension sont en quadrature : (p = tt/2 rad ; u est en avance de tt j2 rad sur i.
Le module de l'impédance d'une bobine idéale augmente avec la pulsation ; à très basse fréquence,
la bobine se comporte alors comme un court-circuit. En revanche, à très haute fréquence, c'est l'inverse :
le composant devient un coupe-circuit.
Sur la figure 2.6, on a dessiné les représentations de Fresnel des impédances des trois dipôles
passifs principaux : résistor, condensateur idéal et bobine idéale.
Im {/?}
Im{ZL} '
ii
ImlZcl
Re{Zc}
0
0
Re{ZL)
Re{R}
FIG. 2.6.
c) Caractéristique d'un condensateur ou d'une bobine idéale
En régime sinusoïdal, la caractéristique i{u) d'un condensateur ou d'une bobine idéale ne présente que peu d'intérêt, puisque la courbe obtenue dépend de la fréquence d'étude. En effet, pour un
condensateur :
i = imcos{ù)t)
et
u = umcos{cot + (p)
avec
um = \Zc\im = —et
(p = arg(Zc) = —7r/2 rad
Lois de base des circuits en régime quasi stationnaire
49
On reconnaît l'équation paramétrée d'une ellipse dont le rapport des axes vaut 1/CVu. La figure 2.7
représente cette ellipse pour un condensateur de capacité C = 1 /jlF soumis à une tension sinusoïdale
d'amplitude constante et de fréquences successives 50, 200 et 500 Hz . A la fréquence la plus basse,
la caractéristique se rapproche de celle d'un coupe-circuit, qui est précisément celle obtenue en régime
stationnaire.
d{î)
"x\
\\
\\
111/
*»
\
n
Sr. *
* ,•
i
C~~- 1 N
1\
iV
1«
««
*\
\\
\ s.
I : 50 Hz
II : 200 Hz
III : 500 Hz
u{t)
**
t*
1« *
ti
FlG. 2.7.
Il est possible d'observer de telles courbes en utilisant la fonction « test de composants » de certains
oscilloscopes, lesquels fournissent une tension sinusoïdale de fréquence 50 Hz.
Au cours d'une période, on constate que le condensateur se comporte tour à tour en générateur et
en récepteur, puisque sa caractéristique explore les quatre quadrants. Le condensateur est néanmoins un
dipôle passif, puisqu'il n'échange de l'énergie qu'avec le circuit ; aussi l'énergie qu'il fournit n'excèdet-elle jamais celle qu'il a reçue du circuit lors de la phase précédente où il s'est comporté en récepteur.
Il en est de même pour les bobines idéales qui ne peuvent que stocker de l'énergie sous forme
magnétique.
II. 5. — Association d'impédances
Les lois d'association des impédances complexes sont identiques à celles relatives aux résistors en
régime stationnaire (cf. Électromagnétisme).
a) Association en série
Comme les différents dipôles associés en série sont parcourus par le même courant et que la tension
aux bornes du dipôle équivalent est la somme des tensions aux bornes des dipôles qui le composent, on
trouve, en notation complexe :
1 = h =12 = ■■• = ik
=
•••
=
in
et
M = M| + M2 + ••• + Mfc + ••• + M,,
Il en résulte :
U
Ml . M2 .
.Un
Ml . M2 .
M/i
Ze — — — —:—I—:—h...H—r — t——h...— — Z\
—2
hi
Z2
Zn
soit
-7
Ze — > Z^
k=\
Exemple : déterminons l'impédance complexe équivalente à l'association en série d'un résister, de
résistance /?, d'une bobine idéale, d'inductance L, et d'un condensateur idéal, de capacité C. D'après
2. Lois de base des circuits en régime quasi stationnaire
50
ce qui précède, on trouve :
Z = R -\-j { Loj —
d'où
|Z| =
R2 +
Lùj
On voit que [Z| passe par une valeur minimale qui vaut R, pour co = 1/(LC) 'Z2 (cf. chapitre 3).
b) Association en parallèle
Comme les différents dipôles associés en parallèle sont soumis à la même tension et que l'intensité du courant qui traverse le dipôle équivalent est la somme des intensités dans chaque dipôle qui le
compose, il vient, en notation complexe :
i,. + ... + z,,
? = il
?i -M
r £2
et
u = u, = Uy — ... = m = ... = u,
Par conséquent :
y. = - = - + - +
U
U
U
+- = — + — +
U
M|
«2
un.
u.
= F, + 72 + ... -f F»
u
soit
Ye = y^ Yk
Exemple : calculons l'admittance complexe équivalente à l'association en parallèle d'un conducteur
de résistance /?, d'une bobine idéale d'inductance L et d'un condensateur idéal de capacité C. D'après
ce qui précède :
r
Y= R+iCco+]L
=
R+i{Ca'~èa)
d oiI
'
171 =
211 /2
2
(i)
+
(Cû'"i)
Ce circuit oppose donc une admittance minimale qui vaut i/R à un courant de pulsation co = ojq avec
ù>o = l/(LC)i//2. Comme cette admittance est nulle lorsque R est infini, le courant entrant dans le
circuit dans ce cas est nul ; le circuit semble s'opposer à un tel courant, d'où son nom de circuit bouchon
(cf. chapitre 3).
II. 6. — Générateurs en régime sinusoïdal établi
En régime sinusoïdal établi, les générateurs délivrent un signal, tension ou courant, caractérisé
par l'amplitude, la fréquence / = ù)/(27r) et le déphasage éventuel (f) par rapport à une référence.
On écrira, respectivement pour un générateur de tension et un générateur de courant, qui fournissent
respectivement la f.e.m e(t) et le c.e.m t(r) (prononcer iota) :
e{t) = em exp(/*>? + 0,,) = em exp(/W)
et
L(t) = tm exp(Jojt + ^t) = Lm exp(/wt)
Le plus souvent, le circuit ne comporte qu'un seul générateur, lequel sert alors de référence pour les
déphasages ; (f)e ou (f)L sont alors nuls.
Les générateurs réels présentent en outre une impédance interne Z/ qui prend en compte l'écart de
leur comportement par rapport aux modèles de générateurs idéaux. Pour un générateur de tension, l'impédance interne Z,- est en série avec la source de tension ; pour un générateur de courant, l'admittance
interne F,- = 1 /Z/ est en parallèle avec la source de courant (Fig. 2.8).
Les relations entre le courant i et la tension u sont donc les suivantes :
u = Zii- em
et
i = F; zz + L
pour un générateur de tension et de courant, respectivement.
Lois de base des circuits en régime quasi sîaîionnaire
51
Yi = 1/Zf
<D
Z/
FTG. 2.8.
Tout comme en régime stationnaire, on passe d'une représentation à l'autre, en remplaçant la source
de tension par une source de courant selon la correspondance
= em/Zi = em F/ et en associant
l'admittance interne F(-= 1 /Z2- en parallèle.
Les GBF les plus couramment utilisés présentent une résistance interne de 50 O et imposent que
l'une de leurs bornes soit la masse du circuit, car elle est reliée par une connexion interne à la prise de
terre. Il existe également des GBF, dits à masse flottante, pour lesquels aucune des bornes n'est reliée à
la terre et qui n'imposent pas de masse au circuit.
III. — LOIS DE BASE EN RÉGIME SINUSOÏDAL
III. 1. — Écriture des lois de Kirchhoff en régime sinusoïdal
Nous avons déjà vu que les lois de Kirchhoff restaient valables dans FARQS. Réécrivons-les en régime établi sinusoïdal, de préférence à l'aide de la notation complexe, cette dernière permettant l'utilisation habituelle des règles simples du calcul algébrique sur les nombres complexes.
a) Loi des nœuds
Comme les tensions et les intensités des courants sont de même pulsation co, tous les termes en
exp(/û>r) se simplifient ; aussi la loi des nœuds porte-t-elle uniquement sur les amplitudes complexes :
Ç ek 40) = Re |Ç e* 4.| = Re | exp(/&>/) Ç ek i^k| = 0
donne
Ç ek i^k = 0
avec £k — \ pour les courants orientés vers le nœud considéré A et
= — 1 pour les courants orientés
y
vers un autre nœud. Evidemment, la somme porte sur toutes les branches arrivant en A .
b) Loi des mailles
La loi des mailles, elle aussi, s'écrit uniquement en fonction des amplitudes complexes :
ÇefcMfcO) =Re|ç^Mfc| =Re|expOW)Ç£^a| =0
soit
avec £k = 1 si les flèches qui représentent les tensions sont orientées dans le sens de parcours de la
maille. La sommation porte sur toutes les branches formant la maille considérée.
c) Application à la détermination d'impédances
On a vu, en régime stationnaire, que le pont de Wheatstone permettait de déterminer la résistance
d'un résister inconnu. De façon analogue, un tel pont peut être utilisé en régime sinusoïdal établi pour
52
2. Lois de base des circuits en régime quasi staîionnaire
déterminer l'impédance d'un dipôle linéaire inconnu. Le montage est alors appelé pont de Maxwell ;
on l'utilise pour déterminer les caractéristiques d'une bobine réelle que l'on modélise à basse fréquence
en associant en série une bobine idéale d'inductance Lj et un résistor de résistance R[ . Les résistances
/?2 et /?4 sont connues, R3 et C3 sont réglables. Lorsque le générateur délivre une tension emcos{ù)t)
entre les points P et
l'ampèremètre de résistance Ra indique l'intensité i du courant dans la
branche AB (Fig. 2.9).
C3
~e
Fig. 2.9.
L'expression de l'intensité est obtenue en utilisant les lois de Kirchhoff en notation complexe. La
loi des mailles appliquée dans les trois mailles donne les trois équations suivantes :
Z\i] + Rai — Z$i_2 = 0
— £ 'L Z\i\ -f Z2(f j — /) — 0
—e
Z4I2 "L 23(^2 "fî) — 0
On en déduit :
Z21:
il -
et
Z, +Z2
D'où:
e — Z3/
h —
"
Z4 + Z3
Z2Z4 — Z1Z3
= e
Ra (2| + Z2 ) (Z3 + Z4) + Z\ Z2 (Z3 + Z4) + Z2Z3 (Z 1 + Z2)
Le pont est équilibré si l'ampèremètre n'est traversé par aucun courant, ce qui implique une relation
entre les quatre impédances analogue à celle qui a été établie en régime stationnaire ;
Z1Z3 — Z2Z4
soit
(Pj -f- jL\co)
P3
— P2P4
1 + /P3 C^oj
Il en résulte que P1P3 + jLxR^ù) = P2P4 + jR2RARiC3CO, ce qui donne, en identifiant partie réelle et
partie imaginaire : R\ = P2P4/P3 et L| = P2P4C3.
Exemple : afin de déterminer les caractéristiques d'une bobine à air de 1000 spires, on réalise le montage en prenant P2 = P4 = 1 kfl et un générateur de tension stationnaire. L'équilibre
est obtenu pour P3 = 72 kfi. Le générateur stationnaire est alors remplacé par un GBF et l'équilibre est de nouveau atteint pour C3 = 42 nF. On en déduit la résistance interne de la bobine,
Pi = P2P4/P3 = 13,9 fi, ainsi que son inductance Li = P2P4C3 = 42 mH .
III. 2. — Théorème de Millman
Le théorème de Millman reste également valable en régime sinusoïdal dans l'ARQS, pourvu que
l'on utilise les amplitudes complexes des tensions. Au nœud A d'un circuit, la tension a donc pour
expression :
11
^ I2/c
;
+ £khn,k
Lois de base des circuits en régime quasi stationnaire
53
la sommation portant sur toutes les branches qui aboutissent en A ; rappelons que Ton compte positivement les f.e.m orientées vers le nœud A ( £* = 1 ) et les c.e.m dirigés vers le nœud A ( ^ = 1 ).
Exemple : déterminons la tension u{t) aux bornes du résister dans le circuit de la figure 2.10 où
les générateurs de tension et de courant fournissent des signaux de même fréquence /, déphasé de
7r/2 rad :
e(t) = emco$(cûî)
et
t(?) = tmcos
^
d'où
e(l) = emexp(/<wt)
et
i(t) = jimtxpijojt)
Si on choisit une valeur nulle pour la tension au point M où les deux générateurs sont connectés, la
tension u{t) recherchée est égale à celle du nœud A reliant le résistor et le condensateur. En appliquant
le théorème de Millman en ce point, on obtient :
jeCcoA-i
emC(o + Lm
M = TT:
T—- = —
—r exp(/û>r)
jCco-Ll/R
Cco—j/R
On en déduit l'expression de u{t) = um cos(W + (f) avec :
Um
emCo) ~f" r»!
-p(C^^ + l/R2)'7-
,
f \ \
é = arctan ——
\RCui)
et
A
C
R
A
©
M
Fig. 2.10.
III. 3. — Symétries d'un circuit
Il est judicieux d'utiliser les propriétés de symétrie et d'antisymétrie des tensions et des courants
(cf. chapitre 1 et Elecîromagnéîisme). Rappelons les résultats essentiels :
i) si le réseau (ou une portion du réseau) présente un plan de symétrie V , aucun courant ne traverse
■p et les points symétriques par rapport à V sont à la même tension ;
ii) si le réseau présente un plan d'antisymétrie Q, la répartition des courants est aussi antisymétrique et les points de Q sont au même potentiel.
Remarque : Il existe d'autres théorèmes importants relatifs aux circuits linéaires (théorèmes de superposition, de Thévenin et de Norton), que nous verrons ultérieurement (cf. chapitre 5).
III. 4. — Diviseurs de tension et de courant
Les expressions établies en régime stationnaire pour les diviseurs de tension ou de courant se
transposent aisément (Fig, 2.11 ) :
54
2. Lois de base des circuits en régime quasi stationnaire
I
Z,
-2
1
R
—2
e{t)
C
I
uc{î)
b)
a)
FlG. 2.11.
FlG. 2.12.
Exemple : un générateur de tension impose une tension sinusoïdale aux bornes d'un circuit RC
série, avec C = 2,2 jxF et R = 50011 (Fig. 2.12). Calculons l'amplitude et le déphasage de la tension
aux bornes du condensateur. En notation complexe, il vient, puisqu'il s'agit d'un diviseur de tension :
Zc
Me,m =
Zc
p
R-m
.. .
d'où
1
Me,mi = Y"
1
1 + JRCoj
R/Zc
L'amplitude de la tension wc est alors égale à :
1
1
avec r = RC = 500 x 2,2x 10 6 = 1, lins
em —
1 + jû)T
1 + (iur)2]1/2
_
Cette amplitude se réduit quasiment à em pour ru <C r
et devient très faible pour tu
r
.On
déduit aisément de l'expression de uc m le déphasage de uc par rapport à la tension du générateur prise
comme référence de phase :
4> = arg
= -arg(l +jcoT) = -arctan(wr)
Notons que ce déphasage varie entre 0 en régime stationnaire et tt j2 rad à haute fréquence.
IIT. 5. — Application à la mesure de l'impédance interne d'un GBF
Il est possible d'utiliser un diviseur de tension pour déterminer l'impédance interne d'un GBF. Il
s'agit de la méthode dite de la tension moitié. Après avoir relevé la f.e.m em du GBF, on branche sur
celui-ci une résistance variable que l'on ajuste jusqu'à ce que la tension u à ses bornes soit égale à
em/2 (Fig. 2.13).
GBF
_e
Ri
R
e
Fig. 2.13.
La résistance variable est alors égale à la résistance interne du GBF. En effet :
u = e.
Exemple concret :
R
R + Ri
fit
= —
2
J, V
d ou
RI
——— = R +Ri
2
= 10 V , i? = 50 O d'où Rj = 50 El.
et
r>
ri
R
= Ri
Lois de base des circuits en régime quasi sîaîionnaire
55
IV, _ PUISSANCE EN REGIME SINUSOÏDAL
IV. 1. — Puissance active ou puissance moyenne
En régime variable, la puissance instantanée V-, reçue par un dipôle s'obtient à partir de l'expression stationnaire, valable à tout instant (cf. Électromagnétisme) :
Vi(t) — u(t)i{t)
soit
Viit) — umim cos{ù)t + (f)u) cos(wr + <^)
puisque, en régime sinusoïdal, u{t) et i{t) s'écrivent respectivement :
u{t) = um cos(<y/' + (j),,)
et
i{t) = im cos(<y? + 4>i)
En raison des fréquences habituellement utilisées dans TARQS, le plus souvent supérieures à 50 Hz,
et de la durée Tc( d'une expérience généralement très supérieure à la période T = 1//, la grandeur
intéressante est la puissance moyenne reçue :
v = nf) = L
avec : Vi(î) = umim cos(wf +
VM dt
cos(^r + ^/) = ^umimlcos(2ùJt +
+ 0,-) + cos(0;( - ^(-)]
Ainsi, la puissance instantanée Vi{r) varie sinusoïdale ment avec la pulsation 2(o autour de la
valeur moyenne V :
1
V =
^
1 fTd
X^r
[C0s(2û)r + 4>lt + 4-) + COS{(^ - ^)1
Jd Jo
d r
1
= ^rdnhn cos(^M - <j>i) X Td
d
puisque le premier terme sinusoïdal donne, par intégration, une valeur pratiquement nulle, ce qui justifie
la définition précédemment donnée (cf. Oscilloscopes et multimètres) dans laquelle on a remplacé Td
par T. La puissance moyenne ou puissance active V s'écrit donc simplement en fonction du déphasage
cp — (pi, ~ tpi de la tension par rapport à l'intensité : V = (nwzm/2) cos (p. On l'exprime souvent en
fonction des grandeurs, {/ et / , appelées respectivement tension et intensité efficaces :
V = -umim cos ç = Ulcos cp
2
avec
U = —7=
ffi2
et
I=
Ç = fpu- <Pi
Par définition, la valeur efficace d'une tension ou d'un courant variables est la valeur qu'il faudrait
donner à cette grandeur, en régime stationnaire, pour dissiper la même puissance que dans un résistor.
La puissance V dissipée dans un résistor soumis à une tension sinusoïdale est V = iimi,n/2 = UI soit
V = u}n/(2R). En régime stationnaire, la puissance dissipée dans un résistor, soumis à une tension U,
est Vs = U2 jR ; en identifiant, on conclut que ces puissances sont égales si on a bien U = um/\f2 . Le
même raisonnement peut être conduit avec l'intensité et donne / = imj\i2.
Exemple : la tension efficace du réseau d'alimentation électrique sinusoïdale des particuliers est de
230 V , ce qui correspond à une tension d'amplitude iim = 230 x \/2 = 325 V .
La définition de la valeur efficace X d'une grandeur x{t) périodique, de période T, est donc telle
que (cf. Introduction expérimentale, oscilloscopes et multimètres) :
T
x2 =
'f Jo
x2
^
dr
expression valable aussi pour des grandeurs périodiques non sinusoïdales.
2. Lois de base des circuits en régime quasi stationnaire
56
Le facteur coscp, qui apparaît dans l'expression de V, est le facteur de puissance ; il s'exprime
simplement à l'aide de l'impédance du dipôle :
cos cp =
Re{Z}
Ainsi, pour {/ et / fixés, la puissance moyenne reçue par le dipôle peut varier de 0 lorsque
(p — ±tt/1 rad, à U1 pour ^ = 0.
Pour un résister, dont l'impédance est réelle, le facteur de puissance est maximal ( cos
la puissance active reçue vaut alors UI.
= 1 ), et
Pour un condensateur idéal ou une bobine parfaite, le facteur de puissance et la puissance reçue
sont nuls puisque (p = ±tt/2 rad ; pour de tels composants la puissance active V est nulle, alors que
la puissance instantanée ne l'est pas : elle est tantôt positive, tantôt négative, car le dipôle stocke de
l'énergie puis la restitue au cours d'une période (cf. Électromagnétisme).
Précisément, la puissance instantanée reçue par un condensateur s'écrit :
Vi(t) = u(t)i{t) = LlC^ = ^ (jc"2)
soit le taux de variation de l'énergie stockée par le condensateur.
De même, la puissance instantanée reçue par une bobine idéale a pour expression ;
^ QL*2)
Vé(t) = u{t)i{t) =
soit le taux de variation de l'énergie stockée par la bobine.
Seule la partie résistive d'un dipôle absorbe de la puissance active. En effet, pour un dipôle quelconque, d'impédance Z = /? +yX, la puissance reçue a pour expression ;
^ Uinim
tp — ^ Ri m — -, r,?2
2R +X2
car
um - |Z| im
et
cos ^
R
R
^ - J^Txïy/ï
Cette puissance s'annule, quelle que soit la valeur de X, pour R = 0. Notons que la réactance X influe
en général sur la valeur de um ou im et donc sur la puissance dissipée, bien que la dissipation ne se
produise qu'au niveau des parties résistives.
IV. 2. — Puissance apparente et puissance réactive
c
û
(M
"l-
a) Puissance apparente
La puissance moyenne reçue par un dipôle, V = UJ cos (p, ne peut dépasser la valeur S — Ul,
laquelle fournit une estimation rapide de l'équipement indispensable en tension et en courant. Pour
distinguer cette quantité S de la puissance active 'P exprimée en watt, on l'appelle puissance apparente
et on l'exprime en volt-ampère (VA).
Exemple : un transformateur est un appareil permettant, grâce au phénomène d'induction entre un
circuit primaire et un circuit secondaire, une modification de la tension sinusoïdale sans variation de
puissance (cf. chapitre 7 et Électromagnétisme). Sur sa plaque signalétique sont inscrites les caractéristiques suivantes : 230 V au primaire, 12 V au secondaire et 60 VA, ce qui correspond dans le
secondaire à Us = 12 X et Is — S/U = 5 A . Ce transformateur pourra donc débiter dans le circuit secondaire un courant maximal de 5 A. Dans ce cas, la puissance disponible dépendra de l'impédance de
la charge connectée aux bornes du circuit secondaire ; elle est généralement inférieure à 60 W et égale
à cette valeur lorsque la charge est purement résistive.
Lois de base des circuits en régime quasi stationnaire
57
b) Puissance réactive
Il est utile d'introduire, en dehors de la puissance active et de la puissance apparente, une autre
puissance qui exprime les rôles des composants, tels qu'un condensateur ou une bobine. Ainsi, définiton la puissance réactive Q selon :
Q=
sin (p = Uî sin (p
Pour la distinguer de la puissance active et de la puissance apparente, on l'exprime en volt-ampèreréactif (VAR).
La puissance réactive d'un résister est nulle, car ce dipôle n'introduit aucune différence de phase
entre la tension et le courant. En revanche, celles d'une bobine d'inductance L et d'un condensateur de
capacité C valent respectivement :
7
Q = UJ sm ç = UI = LmI
et
.
Q = UI sin (p = —UI =
I2
Cco
Ce concept de puissance réactive permet de caractériser le type d'installation :
i) si Q > 0, le système reçoit de la puissance réactive, puisque sin ç) > 0 ; l'installation est de
type inductif,
H) si Q < 0, le système fournit de la puissance réactive, puisque sin ç) < 0 ; l'installation est de
type capacitif.
Notons que les puissances active, apparente et réactive, sont reliées par la relation simple suivante :
S2 =V2 + Q2
ce que l'on retient sous la forme d'un triangle de puissances où les trois puissances sont les trois côtés
d'un triangle rectangle d'angle (p (Fig. 2.14).
"
I
IQ
_J
Lj
V
Fig. 2.14.
Exemple : sur le transformateur d'une guirlande de sapin de Noël, qui comporte 180 petites lampes
connectées en série, on peut lire les informations suivantes :
PR/Entrée :
230 V - 50 Hz
SEC/Sortie
24 V - 850 mA - 20,4 VA
En outre, il est indiqué que chaque lampe consomme une puissance de 0.112 W.
Ainsi, le transformateur est constitué d'un circuit PRimaire aux bornes duquel la tension sinusoïdale du secteur de valeur efficace 230 V et de fréquence 50 Hz est appliquée. Aux bornes du SECondaire, la tension efficace est de 24 V, l'intensité de 0, 85 A, d'où la puissance apparente de 20,4 VA.
2. Lois de base des circuits en régime quasi staîionnaire
58
On peut en déduire le cos cp de l'installation selon ;
COS(0 = ^ =
S
180
f 112
'
= 0,988
20.4
d'où
tan (p —
t
cos1 (p
] — 0,155
Comme la résistance de l'ensemble des lampes est telle que V = U^jR , 'û vient :
U2
242
= 28.6fl
20,15
V
IV. 3. — Puissance complexe
La notation complexe, qui est un intermédiaire de calcul très commode, n'a pas été utilisée dans
l'analyse énergétique précédente, car cette dernière fait apparaître des grandeurs quadratiques. Cependant, on peut l'introduire en remarquant les égalités suivantes :
exp(/<£„) im exp(—y<£,■)} = ^umim cos (p
et :
-lm{umg} = -lm[uin expijéu) im expÇ-yV^-)) = -umimsin(p
désignant le complexe conjugué de im . Il vient donc :
V = Re{V}
Q = lm{V}
S = \V\
où
V = V+jQ=
désigne la puissance complexe reçue par le dipôle considéré.
Pour un dipôle d'impédance Z — R+jX, ou d'admittance Y — G-LjB, on a:
= {z\u2 = zi1 = ri2 +jxi2
2=
ou bien
= \y*\%„\2 = w2 = gu2-jbu2
2 = IeX, =
Remarque : La partie réelle de la puissance complexe est la puissance moyenne réelle (puissance active) et non la puissance instantanée réelle.
IV. 4. — Grandeurs efficaces complexes
Ce qui précède suggère de définir des grandeurs complexes efficaces, associées aux tensions et aux
intensités sinusoïdales :
U=
= U exp (/(/»„)
et
/ =
= / exp(/^)
On écrira alors :
u{t) = U\/2exp(Jù)t)
i{t) = [s/îexpijcot)
et
V — Rc{UI*}
Lois de base des circuits en régime quasi stationnaire
59
IV. 5. — Théorème de Boucherot
Dans un circuit électrique, certains dipôles générateurs fournissent de la puissance électrique que
des éléments résistifs dissipent par effet Joule et que d'autres, tels les condensateurs et les bobines,
stockent sous des formes différentes.
Le théorème que le physicien français P. Boucherot a établi en 1900, s'exprime comme suit.
Dans un réseau électrique, parcouru par des courants sinusoïdaux, la somme des puissances actives est nulle, ainsi que la somme des puissances réactives.
Pour l'établir, commençons par l'exemple simple d'un réseau constitué de quatre nœuds, numérotés
1 , 2, 3 , 4, et disposés comme le montre la figure 2.15.
3
.
FlG. 2.15.
En régime quasi stationnaire sinusoïdal, la puissance complexe du réseau est la somme des puissances complexes sur toutes les branches :
2 = E 2* = ^ E
b
b
= E 2*2
b
ce qui s'explicite dans le cas considéré selon :
£ = [ILnCn + U-nLn + HuCu + U23Lh +
+ UUL»]
Si l'on introduit les potentiels électriques efficaces complexes aux nœuds, V, , • • • V4 , les différents
termes de puissance entre crochets s'écrivent respectivement, en introduisant les potentiels efficaces
complexes :
(Vi-EjUn
iv^^LU
(Yi-W-n
[YI-YÙËA
En sommant ces quantités et en les regroupant par potentiel, on obtient :
£ = r, {Ln + £3 + £4) + £2(-£2 + £3 + £4) + £3(-£3 - £3 + £4) + £,(-£4 - £4 - £4)
D'après la loi des nœuds, les sommes sur les intensités sont nulles, d'où :
Vb = 0
b
ce qui donne
b
Vb = J]] Ubh cos (pb = 0
b
en séparant partie réelle et partie imaginaire.
et
^ Qb = ^ Ubîb sin (pb = Q
b
b
2. Lois de base des circuits en régime quasi stationnaire
60
On peut établir ce résultat de façon générale en considérant un circuit contenant un nombre quelconque de branches, k et l étant les nœuds aux extrémités de la branche kl. On a :
Es, =
b
kl
= î E^s = 5 Efe
kl
k,l
Y.k et Yi étant les potentiels efficaces complexes aux nœuds â: et / ; le facteur 1 /2 provient de
la sommation sur les branches, car ces dernières ne doivent pas être comptées deux fois. Les deux
sommations précédentes s'écrivent aussi, respectivement :
Em = E^E&
kj
k
I'
et
-E^^=
k,l
-E^E^ = E^E^'
k
l'
k
V
puisque //^ = —Jw '■> dans le premier terme, on a commencé par fixer une valeur de k puis on a fait
varier l'entier l' sur toutes les branches issues du nœud k : dans le second, on a permuté d'abord les
indices muets k et /. Il en résulte que ces deux sommations ont finalement la même expression, d'où :
EB.=E^ES'
h
kl.'
On reconnaît, dans la sommation sur l', la loi des nœuds selon laquelle Yli' £ki'IXu
quent :
E^ =
b
=
0. Par consé-
0
ce qui établit le résultat recherché.
yZ'ph=yzUhib cos ^=0
b
b
et
53 ^=53Uhib
h
h
sm
vb=0
Exemple : dans un local industriel, alimenté sous une tension efficace de 230 V, sont branchées en
parallèle cinq lampes, consommant une puissance de 100 W chacune, et deux moteurs de puissances
actives Vi = 5 kW et TE = 6 kW ; les facteurs de puissance de ces moteurs valent respectivement
cos i^i = 0,84 et cos cp2 = 0.75 .
Dans le but de déterminer le facteur de puissance de l'ensemble, calculons les puissances active Vg
et réactive Qg du générateur d'alimentation à l'entrée du réseau. D'après le théorème de Boucherot, on
a:
7E + 5 x 100 + 5 000 + 6000 = 0 d'où V0 = -ll.5kW
Qs + 5 x 0 + 5 000 x tanfarccos 0,84) + 6000 x tan(arccos 0,75) = 0
d'où
On en déduit, à l'aide du triangle des puissances (Fig. 2.14), tan^
cos (pg = 0,80.
=
Qg = —8,5 kVAR
Qg/Vg
=
0.74 et
IV, 6. — Distribution de puissance électrique
Tout distributeur de puissance électrique, par exemple EDF en France, cherche à diminuer les
pertes de puissance le long des lignes conductrices en raison de l'effet Joule. Sur la figure 2.16, on
a schématisé cette distribution : on désigne par r la résistance des lignes, Z la charge, I l'intensité
efficace du courant dans la ligne et U la tension efficace aux bornes de la charge.
Lois de base des circuits en régime quasi stationnaire
61
Ligne
w
C
Distributeur
de puissance
électrique
u
(D
Utilisateur
l
il
z
Ligne
1
T
I
FTG. 2.16.
Les installations électriques industrielles ne sont pas purement résistives mais possèdent un effet inductif
non négligeable dû aux enroulements des moteurs ( Im{Z} > 0 ). Aussi est-il judicieux d'étudier, pour
une puissance utile Vu fixée consommée par l'utilisateur, l'influence du facteur de puissance sur la
perte de puissance Vi occasionnée par les lignes de transport. On a :
Vi = rl~
et
Vu = UI cos (p
d"où
Vi — r
V'
2
U COS2 cp
Ainsi, la puissance Vi perdue dans la ligne est inversement proportionnelle au carré de la tension fournie
à l'utilisateur et au carré du facteur de puissance de son installation.
Afin de minimiser les pertes en lignes, sans modifier la puissance reçue par l'utilisateur, le distributeur
impose à ses clients un facteur de puissance minimal de 0, 90. En cas de non respect de ce minimum, il
applique une tarification pénalisante. Si une installation électrique possède un facteur de puissance trop
faible, on connecte, en parallèle ou en série avec l'installation, un condensateur qui compense l'effet
inductif et amène le facteur de puissance à une valeur proche de 1.
Donnons les facteurs de puissance de quelques appareils usuels :
i) lampe à incandescence ; cos (p = l,
ii) four à induction compensé par condensateurs (prévus par le constructeur) : cos
= 0, 85 ,
iii) lampes à fluorescence avec compensation : cos 9? = 0,93 ,
iv) poste de soudure à l'arc, sans compensation : cos
= 0,5 .
Afin de diminuer les pertes en ligne, le distributeur augmente, à l'aide de transfonnateurs, la tension efficace sur les lignes de transport entre la source de production et l'agglomération à desservir;
cette tension peut atteindre 400 kV. À proximité du consommateur, la tension est abaissée, en plusieurs étapes, jusqu'à environ 230 V , grâce à des transformateurs abaisseurs de tension. Ce procédé fut
proposé pour la première fois en 1887 par l'ingénieur électronicien croate N. Tesla.
V
A l'entrée des installations industrielles, le distributeur utilise des wattmètres pour mesurer la puissance électrique active consommée ainsi que des VARmètres, précisément dans le but de contrôler le
facteur de puissance de l'installation.
Exemple : une installation électrique est équivalente à un dipôle d'impédance Z = R + jX avec
X > 0, en raison de son caractère inductif. Elle est alimentée par le réseau de distribution U = 230 V
et / = 50 Hz. Le courant efficace consommé est de 16 A pour une puissance disponible de 3 kW.
Déterminons le facteur de puissance cos (p ainsi que R et la capacité du condensateur qu'il faut placer
en parallèle sur l'installation pour obtenir un facteur de puissance de 1. Nous avons :
V= UIcoscp
d'où
3 000
V
cos (p = — =
= 0. 82
^
UI
230 x 16
En outre, puisque V = RI2 et U = |Z|/, on trouve :
R
V
I2
11,712
et
v-ï
14,412
d'où
X = (|Z|2-R2)1/2 = 8,412
62
2. Lois de base des circuits en régime quasi stationnaire
Pour que le facteur de puissance ait sa valeur maximale, il faut que la capacité C du condensateur,
connecté en parallèle, réalise une susceptance (partie imaginaire de l'admittance) de l'ensemble nulle :
ïm{Fe}
=0
1 e/
avec
Ye = JjCco H
1
R
/
= —2
+ J/ ( Cco
2
R+jX
R +X
\
X
\
)
R +X J
2
2
ce qui donne C = X/[ù}{R2 + X2)] = 129 p^F .
IV, 7. — Adaptation d'impédance en puissance
Comme en régime stationnaire, il y a adaptation d'impédance entre un dipôle générateur et un dipôle récepteur, lorsque le transfert de puissance du générateur vers le récepteur est maximal. Cherchons
donc à établir les conditions dans lesquelles la puissance, dont un utilisateur peut disposer sur une impédance de charge Z = R+jX, est maximale lorsqu'elle est connectée à un générateur de tension sinusoïdale, d'amplitude em et d'impédance interne Z/ = Ri + jX-,. Exprimons pour cela la puissance
active disponible dans le récepteur :
P
= Re{Z}/2 = Re{Z}^ = f
En annulant les dérivées partielles par rapport à
et par rapport à X, on trouve :
' + Ri){Ri-R) + {X + Xi):
R{X + K
2
Ri)2 + (X -
[(R + Rif + iX + Xif]
d'où : X = —X, et R = Rj. Finalement, l'impédance de charge qui permet de récupérer le maximum de la puissance active fournie par le générateur et l'impédance interne de ce dernier doivent être
conjuguées :
z=zr
d^ù
vM^r-
Cette adaptation d'impédance est souhaitable lorsque les générateurs délivrent des signaux de faible
puissance comme un microphone ou une antenne de télévision, car toute atténuation supplémentaire
d'un signal déjà faible dégrade notablement la qualité du signal de sortie. Notons que l'impédance
interne du générateur dissipe la même puissance que la charge, ce que l'on évite de réaliser lorsque le
signal fourni par le générateur est suffisamment puissant, puisqu'une trop forte dissipation d'énergie
dans le générateur peut affecter son fonctionnement. C'est ainsi qu'à la sortie d'un amplificateur audio,
on évite souvent d'adapter son impédance interne sur celle du haut-parleur à la sortie.
Exemple : un générateur sinusoïdal, de résistance interne Ri, délivrant une tension d'amplitude em
et de pulsation co, doit fournir le maximum de puissance à un résister de charge R ^R,. On se propose
de réaliser l'adaptation d'impédance à l'aide du montage représenté sur la figure 2.17a pour lequel un
condensateur de capacité C est branché en série avec le générateur et avec l'association en parallèle de
la charge et d'une bobine idéale d'inductance L.
63
Lois de base des circuits en régime quasi stationnaire
X
Jl~
c
Ri
C
Ri
L
R
L
R
b)
a)
FlG. 2.17.
En associant en série la résistance interne du générateur et le condensateur, on obtient un générateur
d'impédance interne Z, = R. + 1 /jCco . Ce générateur débite dans la charge constituée par le résistor de
charge associé avec la bobine en parallèle ; l'impédance de la charge est alors :
JRLco
Z = R/IZl =
"
R+ jLto
RL2oj + jR2Lco
R2 + L2Ù)2
et la puissance qu'elle dissipe est maximale si :
7 = Z,
7Z
>
soit
P =
R,
RL20)1
R2 + L2(o:
et
1
R2Lco
Cco
R2 + L2(x)2
II en résulte : L2o)2 = RiR2 j(R — Ri) et C = Lj(RRi). Cette solution n'a évidemment de sens, que si
R > Ri. Sinon, il faut envisager le montage de la figure 2.17b, pour lequel on a permuté la bobine et le
condensateur, ce qui conduit à : L2cu2 = R2R/{Ri — R) et C = L/(RRi). Dans chaque cas, la puissance
transmise, qui vaut e2n/ (8/?/), représente la puissance maximale que peut délivrer ce générateur. Cette
puissance est entièrement dissipée par effet Joule dans le résistor de charge, le condensateur et la bobine
ne dissipant pas d'énergie.
IV, 8. — Mesure de la puissance à l'aide d'un wattmètre
a) Fonctionnement d'un wattmètre
Un wattmètre présente quatre bornes d'entrée, deux pour la mesure de l'intensité du courant qui traverse le dipôle considéré et deux pour celle de la tension à ses bornes (Fig. 2.18). Il indique la puissance
active UI cos (p dissipée dans le dipôle, et non la puissance apparente UI.
Dans les wattmètres électromécaniques, le courant pénètre dans une bobine et, en créant un champ
magnétique proportionnel à l'intensité, exerce un couple sur une seconde bobine, placée en parallèle
sur le dipôle. Cette dernière est donc parcourue par un courant proportionnel à la tension aux bornes du
dipôle ; un ressort en spirale la ramène vers sa position d'équilibre. En raison de l'inertie, la déviation
du cadre, et donc celle de l'aiguille d'affichage qui en est solidaire, est proportionnelle à la puissance
active.
-
-C
<w>
u"
Symbole d'un wattmètre
FIG. 2.18.
Dans les wattmètres analogiques, on multiplie deux tensions dont l'une est celle aux bornes du dipôle et l'autre est proportionnelle à l'intensité du courant qui le traverse. Le résultat de la multiplication
64
2. Lois de base des circuits en régime quasi stationnaire
est ensuite envoyé sur un filtre passe-bas qui ne restitue que la valeur moyenne, laquelle est proportionnelle à la puissance active.
b) Branchement d'un wattmètre
La résistance interne du circuit entre les deux bornes permettant la mesure de l'intensité est faible,
alors que celle entre les bornes du circuit servant à mesurer la tension est très grande.
Lors du branchement, deux bornes sont mises en commun ; le wattmètre est alors équivalent à
un montage courte ou longue dérivation (Fig. 2.19a et b respectivement). Le critère pour le choix du
montage est la résistance du dipôle étudié : si elle est faible devant la résistance du circuit de mesure de
tension, c'est le montage courte dérivation qui est adopté (cf. chapitre 1).
Remarque : Les wattmètres électromécaniques ne sont sensibles qu'à des puissances élevées, c'est-àdire à celles qui sont supérieures à une dizaine de watts ; ils ne conviennent donc pas pour
les mesures de faible puissance qui sont les plus fréquentes.
b)
a)
Fie. 2.19.
Y. — CIRCUITS ELECTRIQUES EN TRIPHASE
Dans le domaine de la distribution de la puissance électrique, le système triphasé est universellement utilisé ; c'est un ensemble de trois tensions sinusoïdales de même fréquence, de même amplitude
et déphasées l'une par rapport à l'autre de 2-7r/3 rad, soit 120° . Dès que la puissance à fournir est supérieure à 1 kW, la distribution en triphasé présente par rapport à celle en monophasé plusieurs avantages :
0 à la production, un alternateur triphasé fournit une puissance supérieure de 50 % environ à celle
d'un alternateur monophasé de même volume et de même prix,
ii) dans le transport, la même puissance est transportée avec trois fils, alors qu'il en faut six en
monophasé,
iii) à l'utilisation, d'une part deux tensions sont disponibles avec la distribution en triphasé, 230 V
et 230 x \/3 ~ 400 V , d'autre part le moteur asynchrone qui est le moteur électrique le plus répandu
fonctionne en triphasé.
V. 1. — Description du système triphasé
Dans un système triphasé, les sources de tension fournissent, entre un fil conducteur commun, le
neutre, et trois autres fils conducteurs, les phases, trois tensions sinusoïdales dites tensions simples ou
tensions de phase :
Lois de base des circuits en régime quasi stationnaire
65
auxquelles on associe respectivement les tensions complexes suivantes :
Ui = vm expijajt)
ex
P (/w?)
v2 = vm exp
et
^3 = vm exp
ex
P (Jwt)
Ces trois tensions sont déphasées entre elles de 27r/3 rad. Dans le plan complexe, on les représente par
trois vecteurs, en prenant vi comme référence (Fig. 2.20). La somme de ces trois vecteurs est nulle,
ce qui signifie que la somme des valeurs instantanées des trois tensions v{ , ^2 et L3 est nulle à tout
instant :
tJ] + ^2 + ^3 = 0
''—3
ii3l
-277/3
—23 277/3/
\/ !
77/6 V
277/3
1
;
^ u
—2
—4 / ^
Fig. 2.20.
Remarque : Généralement le neutre est dans une gaine plastique bleue alors que les phases sont dans
des gaines noire, rouge et marron.
On appelle tensions composées, ou tensions de ligne, les tensions entre les différentes phases. Ainsi,
entre les phases 1 et 2, la tension de ligne s'écrit, en notation complexe :
M12 = Li - L2 =
exp (/Va/)
2 77
11 - exp |1 -j—
soit
= vm v^3 exp
exp(/a>/)
puisque :
1 — exp
= \/3 exp (
De même, on trouverait :
«23 = vm\/3 exp (-7^)
ex et
P
M31 = Vm C3 exp
L'amplitude des tensions de ligne est donc :
um = V3vm
soit
U = Va/S
ex
P(J(ot)
2. Lois de base des circuits en régime quasi staîionnaire
66
Comme V = 230 V dans la plupart des pays européens, on dispose de tensions de ligne sinusoïdales,
de valeur efficace :
f/ = V3 x 230 = 398 V « 400 V
Notons que les tensions de ligne forment aussi un système triphasé, puisqu'elles sont déphasées les unes
par rapport aux autres de 27r/3 rad (Fig. 2.20). En outre, elles sont déphasées de tt/ô rad par rapport
aux tensions simples. On retrouve donc une relation analogue à celle qui relie les tensions simples
(Fig. 2.20) :
U]2
M23 3" —31
=
^
V. 2. — Courant dans une charge équilibrée
Il existe deux configurations symétriques pour connecter trois charges sur un réseau triphasé : celle
en étoile et celle en triangle.
a) Montage en étoile
Dans le montage en étoile, chaque charge est branchée entre un fil de phase et le fil neutre
(Fig. 2.21).
m
Z2
12
V\
Z3
V2
'3
Fie. 2.21.
Le courant circulant dans le conducteur neutre est la somme des courants de ligne, i, , [2 et *3, qui
circulent dans les dipôles d'impédances Z\ , Z2 et Z3 :
in = ii + ia + is
On dit que le système est équilibré, si les trois charges sont identiques ; l'intensité du courant circulant
dans le conducteur neutre est alors nulle. En effet, si Z| = Z2 = Z3 = Ze, alors :
U\
—i\1 = —'y
r jçt
.
v.2
u = —
—L
ry
/j
et
■
IZ3
h = —
—J
"y
r
.
d ou
IZi +
+ ^3
^
1,, = —
=0
—il
ry
e . £?
L'équilibrage des trois phases présente de l'intérêt, d'une part parce qu'il est adapté au fonctionnement
normal d'un moteur dont les trois enroulements sont équivalents, d'autre part en raison de l'économie
qu'il permet, le fil neutre n'étant alors plus nécessaire.
Ce quatrième fil est parfois conservé sur des distances courtes afin d'assurer l'écoulement d'un
éventuel courant de neutre pouvant résulter de dissymétries accidentelles du système, la présence de ce
fil neutre ayant justement pour effet d'atténuer ces déséquilibres. Toutefois, sa section est plus faible que
celle des fils de phase. Le système à quatre fils est utilisé aussi dans le transport entre le transformateur
moyenne-basse tensions et les usagers d'un même quartier.
67
Lois de base des circuits en régime quasi stationnaire
b) Montage en triangle
Dans le montage en triangle, chaque charge est connectée entre deux fils de phase ; elle est donc
soumise à une tension composée (Fig. 2.22). Ce montage ne comporte pas de fil neutre et le courant
circulant dans chaque impédance est différent du courant circulant sur chaque ligne.
Lorsque le circuit est équilibré (Z12 = Z23 = Z31 = Zr ), les courants circulant dans les trois
impédances sont :
U1 o
.
Uti.
.
M-Î r
1 — —-=1 — —ri et / =
-12
Zf
-23
Z,
-31
Z,
ii
k.
h
A
"31
-4
t ./23
"23
V2
h[\
./3I
U]2
V\
-3
Lu
b
Z23
J\1
—
•'31
'3
ïhi>
FIG. 2.22.
Fig. 2.23.
Il est alors possible d'en déduire les courants circulant dans chaque ligne :
M|2
-12
-31
1131
Z;
vm s/Z
exp {jojt) exp \j
77
exp
Itt
-J-
Zr
ce qui s'écrit aussi :
îi =
exp
expiait)\/3 exp (-;^) = ^ exp(/w/)
De la même façon, on obtiendrait :
32',,
h =J-23
7,.
-12 =
Zf
2-ît
P ( -7y I expOr)
ex
et
477
3?x
^ =7., -./„ = — exp ( -7—
) exp(/wf)
J
-31
23
^
3 /
Z;
L'amplitude des courants de ligne est donc liée à celle des courants parcourant les impédances :
3m
am
|Z/|
.
3?;m
l,n =
|Zf|
d'où
|Zr|
iw = jm\/3
et
I = JV3
La figure 2.23 est la représentation de Fresnel des courants de ligne et des courants parcourant les
dipôles.
Exemple : sur la plaque signalétique d'un moteur triphasé équilibré, on peut lire les indications suivantes : 230 V/400 V , 6,0 A/3,5 A . Ces chiffres indiquent les conditions normales de fonctionnement
du moteur pour lesquelles le rendement du moteur est le plus élevé. Connecté en triangle sur un réseau,
dont la tension de ligne vaut 230 V , le moteur impose un courant de ligne de 6,0 A , alors que branché en étoile sur un réseau, dont la tension de ligne vaut 400 V , le courant de ligne est de 3,5 A. Quel
que soit le réseau dont on dispose, il est possible d'alimenter ce moteur de façon optimale en choisissant le montage adapté, triangle pour un réseau 230 V ou étoile pour un réseau 400 V . Le courant dans
chaque enroulement sera de 3,5 A et la tension aux bornes de chaque enroulement de 400 V .
2. Lois de base des circuits en régime quasi stationnaire
68
V. 3. — Puissance en triphasé reçue par une charge
Dans l'exemple précédent du moteur triphasé, une question se pose naturellement : quelle est la
puissance reçue par le moteur, en fonctionnement normal ?
a) Expression générale de la puissance
La puissance complexe reçue par les charges dans un circuit est la somme des puissances complexes :
J
H — £| + ^2 +^3 =
r'p2+Vï +j{Q\ + Ql + Q3)
Dans un montage étoile équilibré, les trois tensions fi , V2 et V3 ont même valeur efficace V ; en outre,
le montage étant équilibré, les trois courants ont même valeur efficace I et le facteur de puissance est
le même pour les trois phases. II en résulte :
V = 3V7(cos (p
jsin (p)
L'expression que l'on utilise généralement contient U et non V\ car V n'est pas accessible dans un
montage sans fil neutre. Il vient donc, puisque U = \/3 V :
V = \/3UI{cos (p
j sin (p)
d'où
V = V3UIcos
Q= s/3UIsi\
et
S = V3U1
pour les puissances active, réactive et apparente respectivement.
Cette expression de V est encore valable dans le montage triangle. En effet, on obtient de façon
analogue, puisque J = \/31 :
V_ = 3UJ(co$(p-\-j&[n(p)
soit
P = v^f//(cosç»-fjsin <?)
d'où les mêmes expressions pour P et Q. Cependant, soulignons que (p ne représente pas le déphasage entre m et z, mais celui entre v et i, précisément l'argument de Zc, et qu'en outre cette expression suppose que le montage est équilibré.
Notons que le montage triangle et le montage étoile ne donnent pas les mêmes puissances actives
dans trois charges identiques.
Exemple : considérons le cas simple de trois lampes, de résistance R = 500 fi, branchées sur le
secteur triphasé pour lequel V = 230 V . Dans une association en étoile, chaque lampe est soumise à
une tension de phase V = 230 V . On en déduit l'intensité du courant qui la parcourt et la puissance
active qu'elle reçoit :
V
230
I = ~ = —— = 0,46 A
R
500
d'où
^ = 3 x 230 x 0,46 = 320 W
Dans une association en triangle, chaque lampe est soumise à une tension de ligne U = 400 V ;
l'intensité et la puissance valent donc, respectivement :
/ = ^ = ^ = 0,80 A
et
V( = 3 x 400 x 0,80 = 960 W
On voit que la puissance reçue par chaque lampe est le triple de celle reçue dans un montage étoile.
Remarque : Pour le relèvement du facteur de puissance d'une installation triphasée équilibrée, il suffit de brancher en triangle trois condensateurs identiques avant le récepteur, indépendamment de son type de branchement. D'après le théorème de Boucherot, la capacité des
condensateurs doit être telle que la puissance réactive soit nulle :
^. r ri , rrr „•
. r r2 , ti +
a
—3Cù)U + UI sïn<p =—3CcoU~ + Vtancp = 0
J'E Xât] (p
d'où C =
jmU2
Lois de base des circuits en régime quasi stationnaire
69
b) Puissance fluctuante
On sait que, pour un récepteur alimenté par une tension sinusoïdale, la puissance instantanée Vj a
pour expression :
V-, = v(t)i(t) = vV2cos(cot + (f)u) x lVïcos[cot + ^>/) = VIcos(</»„ — </»,-) + VIcos(2wf +
+ 0f-)
Elle présente ainsi deux contributions : l'une est la puissance active et l'autre une puissance fluctuante
qui varie sinusoïdalement avec une fréquence double de celle du générateur ; elle se retranche ou s'ajoute
à la puissance moyenne selon l'instant. Bien que de valeur moyenne nulle, elle est gênante dans certaines
applications telles que l'alimentation des moteurs où elle crée un couple fluctuant (freinage ou non), qui
se superpose au couple utile.
Dans ce contexte, le système triphasé présente un avantage, car la puissance fluctuante, qui est
la somme des trois puissances fluctuantes déphasées de 27r/3 rad, est nulle. Il s'agit là d'une propriété importante des systèmes triphasés équilibrés : leur puissance instantanée est égale à la puissance
moyenne.
Soulignons que les relations précédentes ne sont valables qu'avec une charge équilibrée constituée
de trois impédances identiques. Un déséquilibre de la charge se traduit, selon le montage utilisé, par une
surtension sur une phase ou une surintensité dans un fil de connexion. Dans tous les cas, le déséquilibre
est indésirable, voire dangereux. Son origine peut être accidentel (mise en court-circuit de deux fils,
rupture d'un fil, etc.) ou résulter d'un mauvais équilibrage des charges. En outre, le réseau triphasé doit
le plus souvent alimenter des charges de natures différentes (résistives dans le cas de l'éclairage et du
chauffage, inductives pour les moteurs électriques, etc.) qu'il n'est pas toujours possible d'équilibrer.
Retenons que, dans toute installation, on doit s'efforcer d'équilibrer au mieux les différentes charges.
c) Mesure de puissance
En pratique, la mesure de la puissance active s'effectue à l'aide d'un ou de plusieurs wattmètres.
Si le circuit est équilibré, il suffit d'un wattmètre qui donne la puissance sur une phase et de la
multiplier par trois. La mesure nécessite la présence du fil neutre (Fig. 2.24). La nature du branchement
du dipôle, triangle ou étoile, n'a pas d'influence sur le résultat.
FIG. 2.24.
FIG. 2.25.
Lorsque le circuit est déséquilibré mais comporte un fil neutre, la mesure exige l'utilisation de trois
wattmètres branchés entre chaque fil de phase et le fil neutre (Fig. 2.25).
Si le circuit n'a pas de fil neutre, deux wattmètres 4 et S suffisent (Fig. 2.26). Ici aussi, la nature
du montage est sans importance. Cette méthode convient évidemment si le circuit est équilibré.
Les wattmètres A et 5 donnent les puissances respectives :
2. Lois de base des circuits en régime quasi stationnaire
70
Or, pour un montage en étoile, on a : £3 = —i{ — h,
— «3, et «2
P — 2 RejlZi ii + ^2 i2 + ^3 ^3}
De même, pour un montage en triangle, on a : «12
=
^13
—
—
=
^3 + M23 > d'où :
9 MMIS ^ d" -23
)
M23 > Â3 = 12 + in
-12
et
Â,
-31
=
13 + i„ , d'où
-23
P = ^ Re{wi2 j;2 + u23j_*3 + Msiig,} = ^RejMniî +££2312}
Ainsi, quel que soit le montage, triangle ou étoile, la puissance s'écrit : V = Va + Vb ■
il /- N
W
a.
z
"23
WA
|
|
"13
I1
i "23
.
V[
Montage
triangle ou
étoile sans
neutre
i1
z
11— 1
N
Z
•
1*2
in = 0
T
| "3
Fig. 2.26.
Fig. 2.27.
Pour un circuit équilibré, la mesure de la puissance réactive est réalisée directement avec un seul
wattmètre branché afin de connaître l'intensité du courant sur un fil et la tension entre les deux autres
(Fig. 2.27). En effet, la lecture fournit le produit f/23/1 cos((/>23 — </>/,! ). Cette mesure donne Ulsin (p ,
puisque (Fig. 2.20) :
4>23 - 4*1,1 — (4*23 - 4>v,\) + {4>v,\ - 4*1,1)
— —
■7T
2"
^
Pour obtenir la puissance réactive Q, il suffit de multiplier la lecture du wattmètre par a/B • Cette
puissance peut aussi être déterminée à l'aide du montage à deux wattmètres (Fig. 2.26) :
VA = UIcos(4*n - <^,1) = UIcos(^i3 - 4*v,i + 4*v,\ - 4*i,i.
soit (Fig. 2.20) :
/
Va = Uîcos (
77
\
car
77
^13 - (f)v^ = —— rad
car
023 - 4*v,2 =
On a de même :
(77
— +
\
77
rad
On en déduit que : Va — Vb = —2f//sin <psin(—77/6) = Uîsm ç = Q/v^, d'où Q = \/2){Va — Vb) •
Si le circuit est déséquilibré, la mesure de Q doit être effectuée à l'aide de varmètres dont la
construction est identique à celle des wattmètres avec un déphasage supplémentaire de 77/2 rad pour
la tension. Il est aussi possible de mesurer la puissance apparente 6" à l'aide d'un voltmètre et d'un
ampèremètre et d'en déduire Q par l'expression Q = (<S2 — p2)1/2 .
Lois de base des circuits en régime quasi sîationnaire
VI. _ DISTRIBUTION D'ELECTRICITE ET PROBLEMES DE SECURITE
VI. 1. — Production de puissance électrique
La consommation quotidienne moyenne d'énergie électrique de la toute la France est de l'ordre de
1,33 térawattheure ( 1 TWh = 1012 Wh ), c'est-à-dire environ 3,6 x 10'^ J . Comme le travail électrique
est difficilement stockable (les meilleurs accumulateurs ne pouvant stocker plus de 600 kj - kg-1 ), le
travail électrique doit être disponible au moment de sa consommation. La puissance totale dont dispose le distributeur français EDF (Électricité De France) dépasse les 100 GW , alors que le record de
consommation s'établit légèrement en dessous de 102 GW (pic atteint le 8 février 2012).
Tout distributeur électrique prévoit la puissance à fournir en fonction des données statistiques qui
indiquent la consommation probable en fonction de l'heure, de la saison et des températures observées.
Si la consommation dépasse la production prévue, la tension et la fréquence du réseau baissent légèrement et la réaction du distributeur est immédiate : ce dernier augmente la puissance électrique des
centrales ou importe de la puissance électrique des pays voisins. En cas de sous-consommation, c'est
l'inverse, on exporte de la puissance et on diminue la production.
Comme les sources de production de puissance électrique, que sont les centrales hydrauliques,
thermiques et nucléaires, sont généralement éloignées des lieux de consommation, le transport de cette
puissance joue un rôle essentiel dans la limitation des pertes occasionnées.
VI. 2. — Distribution de puissance électrique
a) Différents types de lignes de transport
Afin de limiter les pertes énergétiques, lors du transport de la puissance électrique, l'utilisation de
tensions sinusoïdales de basse fréquence s'impose. En effet, à haute fréquence, lorsque que l'approximation des régimes quasi stationnaires (ARQS) n'est plus satisfaite, l'effet de peau provoque réchauffement des câbles, par réduction de la section effective, et la nature inductive des lignes induit une
augmentation des pertes (cf. Electromagnéîisme).
Historiquement, c'est le développement du chemin de fer en Europe qui a joué un rôle décisif
dans le choix de la fréquence de 50 Hz. En effet, cette fréquence correspond à celle utilisée par les
constructeurs de locomotrices allemands AEG et Siemens, au début du XXe siècle ; les performances
des moteurs synchrones triphasés, inventés par AEG, étaient optimales à 50 Hz. Aux USA et dans le
Royaume Uni, cette fréquence est de 60 Hz.
"ri
°
En France, les pertes énergétiques sur les lignes de transport, qui sont inversement proportionnelles
à la tension de distribution ( 230 V ), s'élèvent à plus de 12 TWh par an, soit 3 % de la consommation, ce qui correspond à un coût de plus de 300 millions d'euros. On distingue plusieurs réseaux de
distribution.
i) Le réseau Très Haute Tension (THT), à 400 kV et 225 kV, et celui Haute Tension (HT),
à 90 kV et 63 kV, assurent le transport de la puissance, sur des distances de plusieurs milliers de
kilomètres, entre les centrales de production et les postes de transformation principaux. Il alimente
aussi les transformateurs implantés dans les quartiers des grandes villes, ainsi que dans les très grosses
entreprises.
Il est composé de lignes aériennes constituées de fils conducteurs nus, en cuivre ou en aluminium,
entourant un câble intérieur, l'âme, en acier qui permet d'augmenter sa résistance mécanique ; ces câbles
tressés, d'un diamètre total d'environ 30 mm, ont une masse linéique de 2 kg par mètre.
ii) Le réseau Moyenne Tension (MT), à 20 kV et 5,5 kV, relie les postes de transformation
principaux à ceux qui alimentent les villes, ainsi que les petites et moyennes entreprises.
72
2. Lois de base des circuits en régime quasi stationnaire
iii) Enfin, le réseau Basse Tension (BT), à 230 V ou 400 V, est destiné aux particuliers, le plus
souvent en monophasé, et aux entreprises qui consomment peu de puissance, en général en triphasé.
Notons que l'alimentation d'un quartier s'effectue en triphasé ; le neutre et l'une des phases sont
distribués à chaque habitation ; si le réseau est bien équilibré, les charges sur chaque phase sont équivalentes et le courant dans le fil neutre quasiment nul (Fig. 2.28).
Réseau
230/400 V
N
Atelier
□ □
Usine
Fig. 2.28.
Remarques : 1) La lampe à incandescence, inventée par T. Edison, qui permit l'illumination des premières villes, fonctionnait bien à 110 V stationnaire qui est le standard américain actuel
de la valeur efficace de la tension sinusoïdale utilisée. Un peu plus tard, Edison déposa
un brevet de distribution de l'électricité à faibles pertes sous des tensions stationnaires de
220 V, valeur un temps adoptée en France pour le réseau basse tension sinusoïdale EDF,
actuellement augmentée à 230 V .
2) Bien que quatre conducteurs (le neutre et les trois phases) assurent le transport de la
puissance électrique dans les villes, la plupart des poteaux électriques en ville portent
un cinquième fil; ce dernier, relié à l'une des phases, assure l'éclairage municipal (Fig.
2.29a).
b) Protection des lignes
On protège les installations électriques de la foudre, capable de provoquer de très fortes surtensions,
en surmontant les lignes THT d'une ligne de garde qui sert à intercepter la foudre avant que celle-ci
n'atteigne les conducteurs sous tension. Ces fils anti-foudre, qui ne sont parcourus par aucun courant,
en situation normale, sont évidemment reliés à la terre, à chaque pylône, afin d'évacuer sans dommage
les courants parasites de forte intensité.
Malgré les fils anti-foudre, les lignes conductrices sous tension sont parfois touchées directement
ou souvent chargées par influence, lorsque la foudre frappe le fil de garde ou un objet situé dans le voisinage de la ligne. La charge électrique reçue produit une onde de tension, de forte amplitude (plusieurs
centaines de kV ), qui se propage le long de la ligne, à la vitesse de la lumière (cf. Electromagnétisme). Cette onde peut détériorer les isolateurs en porcelaine qui fixent les lignes aux pylônes, ainsi que
les transformateurs situés en bout de ligne.
Les isolateurs, dont le nombre permet de connaître la tension de la ligne (9 pour 63 kV, 14 pour
225 kV et 18 pour 400 kV) sont protégés par des éclateurs qui canalisent la décharge électrique, lors
d'un coup de foudre (Fig. 2.29b).
Les lignes sont équipées de disjoncteurs et de parafoudres.
i) Les premiers ouvrent le circuit, en cas de surintensité, en jouant le rôle de fusible mais n'ont
pas besoin d'être remplacés après utilisation. L'arc électrique qui se produit est éteint par de l'huile ou
Lois de base des circuits en régime quasi staîionnaire
73
par un gaz, en général de l'hexafluorure de soufre SFf,. Ils ouvrent la ligne en quelques centaines de
millisecondes, puis la refennent dès que la charge électrique du coup de foudre a été évacuée vers la
terre.
ii) Quant aux seconds, ils sont constitués d'une série de disques qui se comportent comme des
varistances dont la résistance diminue lorsque la tension s'élève. Ils assurent la liaison entre la ligne
à protéger et la terre. En fonctionnement normal, la résistance totale est très importante et la ligne est
isolée de la terre. Lorsque la tension augmente et dépasse la valeur maximale autorisée, les disques ne
présentent qu'une faible résistance et la décharge vers la terre peut se produire. Une fois la décharge
terminée, quelques dizaines de millisecondes après, les disques présentent à nouveau une résistance très
élevée et la ligne est de nouveau isolée de la terre.
Une manière de protéger les lignes et les personnes consiste à enterrer les fils de transport. Même si
ce procédé est très coûteux et si la chaleur dégagée ainsi que la nécessité d'accéder aux câbles conduisent
à aménager une large zone dépouillée de toute végétation, les distributeurs augmentent progressivement
la proportion de lignes enterrées.
Actuellement, en France, un quart des lignes 63 kV sont enterrées ; leur coût est alors multiplié
par 3 ou 4. Pour les lignes en 225 kV , seules les portions en agglomérations sont enterrées, car le coût
est, dans ce cas, multiplié par 10.
a)
b)
FlG. 2.29.
VI. 3. — Sécurité d'une installation électrique domestique
a) Effets physiologiques en électricité
L'effet d'un choc électrique sur le corps humain dépend de plusieurs facteurs : la durée du passage du courant dans le corps, son intensité, sa nature stationnaire ou alternatif, ainsi que des organes
traversés.
Lorsque l'intensité du courant est inférieure à 10 mA, les effets du courant ne sont pas dangereux,
quelques picotements seulement.
Au-delà de 10 mA , l'intensité et la durée doivent être pris en compte : 20 mA pendant 10 s a
le même effet que 100 mA pendant 1 s ou encore que 500 mA pendant 50 ms . De telles intensités provoquent la tétanisation des muscles traversés : les doigts se crispent et n'arrivent pas à lâcher le
conducteur électrique touché. En outre, le diaphragme, qui permet de comprimer ou de dilater les poumons, au cours de la respiration, risque de se bloquer et ainsi provoquer l'asphyxie ; le cœur lui ne subit
pas de tétanisation mais, lorsque l'intensité dépasse 50 m A , son rythme est troublé (c'est la fibrillation).
74
2. Lois de base des circuits en régime quasi stationnaire
Le courant alternatif de basse fréquence est plus dangereux que le courant stationnaire, précisément
en raison de ses variations au cours du temps, lesquelles favorisent les contractions répétées des muscles
et la tétanisation ; aussi les normes imposent-elles des tensions maximales utilisables moins élevées en
régime alternatif qu'en régime stationnaire.
Pour une tension déterminée, l'intensité du courant qui traverse le corps humain dépend évidemment de sa résistance. Cette dernière n'est pas constante et dépend de l'humidité de la peau : elle varie
de 1 kfl pour une peau humide à 50 kfl entre deux mains sèches. En outre, il faut tenir compte de la résistance de contact entre la peau et les conducteurs, laquelle varie de quelques kfi au niveau des mains
à plusieurs centaines de kfl entre le sol et les pieds dans des chaussures isolantes.
Pour ces raisons, dans les conditions habituelles, la valeur limite de la tension éliminant tout risque
d'électrocution est de 50 V en régime stationnaire et de 25 V efficace en régime sinusoïdal. Cette
dernière valeur est obtenue à partir de la résistance électrique du corps humain évaluée en moyenne à
2 500 H et du seuil d'intensité du courant admissible qui est de 10 mA :
f/ = ^/ = 2500 x 0,01 =25 V
b) Sécurité domestique
Les normes de sécurité française imposent le schéma de liaison à la terre nommé TT (terre-terre) :
le fil neutre de l'installation doit être relié à la terre, ainsi que la carcasse métallique des appareils
domestiques. La reconnaissance du fil de terre est aisée puisque son enveloppe plastique est de couleur
jaune et vert.
En général, les installations domestiques sont munies d'un disjoncteur différentiel dont la fonction est d'ouvrir tout circuit dans lequel l'intensité du courant dans le fil neutre est différente de celle
dans le fil de phase ; en effet, cette différence de valeur traduit généralement un défaut d'isolement
(Fig. 2.30a). Certains disjoncteurs différentiels sont très sensibles : ils provoquent l'ouverture des circuits dès l'apparition d'une différence d'intensité de 30 mA. Ils sont techniquement constitués d'un
circuit magnétique en forme d'anneau (cf. Électromagnétisme), autour duquel on a enroulé trois fils
conducteurs (Fig. 2.30b) ; l'un relié est au neutre, le deuxième à la phase et le troisième commande un
interrupteur. Si une différence d'intensité apparaît brutalement, un courant induit dans le fil de commande actionne l'interrupteur.
Disjoncteur
différentiel
Neutre
CA
l\
Commande de
l'interrupteur
Neutre
Phase
V/
h
Rupture
d'isolant
Terre
Phase
b)
a)
Fig. 2.30.
Dans une installation domestique, les causes d'accidents électriques sont multiples.
i) Le corps humain, qui est en contact avec la terre, peut toucher un fil électrique soit directement
soit par l'intermédiaire de la carcasse métallique d'un appareil électroménager défaillant.
Si le fil touché est le neutre, il n'y aura aucun dégât. En revanche, s'il s'agit du fil de phase, le
courant traversant le corps n'est limité que par sa résistance : l'intensité peut alors être mortelle.
Lois de base des circuits en régime quasi stationnaire
75
Le disjoncteur différentiel se déclenche lorsque l'intensité dans le fil neutre n'est plus égale à
celle dans le fil de phase; c'est précisément le cas lorsqu'une partie du courant de phase traverse la
personne électrocutée. Le disjoncteur peut être différemment réglé : 30 mA pour les prises de courant
et pour l'éclairage des salles d'eau, 100 mA ou 300 mA pour les chauffages ou les gros appareils
électroménagers.
ii) Line autre cause est le contact direct avec les deux conducteurs neutre et phase. Aucun système
de sécurité n'est ici possible, car le corps humain se comporte comme un dipôle électrique quelconque.
Aussi est-il indispensable de couper systématiquement l'alimentation d'une partie du réseau électrique
avant toute intervention, même pour le simple changement d'une lampe sur une douille ; cette dernière
peut en effet présenter un défaut d'isolation.
CONCLUSION
Retenons les points essentiels.
1) Dans l'approximation des régimes quasi stationnaires, les lois de base des circuits ont, à chaque
instant, la même expression qu'en régime stationnaire.
2) En régime sinusoïdal, les lois de Kirchhoff relatives aux nœuds et aux mailles se transposent
directement à l'aide de la notation complexe :
^£^ = 0
et
5>^ = 0
La première sommation porte sur toutes les branches qui concourent au nœud considéré, avec 6^=1
si le courant est orienté vers le nœud, et ^ = — 1 sinon. La seconde concerne tous les dipôles d'une
même maille, avec
= 1 si le sens de Uf. est le même que le sens choisi pour parcourir la maille et
Et — — 1 sinon.
3) En régime sinusoïdal, les composants passifs sont caractérisés par leur impédance Z, qui est le
rapport tension sur courant en notation complexe. Ainsi, l'impédance complexe d'un condensateur de
capacité C est 1 /jCù) alors que celle d'une bobine d'inductance L est jLco ; le facteur j dans ces
expressions traduit un déphasage de ±7r/2 rad de la tension par rapport au courant.
4) En régime sinusoïdal, la puissance moyenne reçue par un dipôle, ou puissance active, a pour
expression :
V = Uî cos (p
17 et / étant les grandeurs efficaces, cp le déphasage de la tension par rapport au courant. On introduit
la puissance complexe V_ = ui*/l dont la partie réelle est précisément la puissance active V et la
partie imaginaire la puissance réactive Q = Ulsïn ç
5) Selon le théorème de Boucherot, la somme des puissances actives et la somme des puissances
réactives sont nulles dans tout circuit.
6) La puissance électrique est distribuée en régime sinusoïdal triphasé, en raison de plusieurs avantages techniques, notamment la facilité de production dans les alternateurs et le moindre coût du transport.
2. Lois de base des circuits en régime quasi stationnaire
76
EXERCICES ET PROBLEMES
P2-1. Circuit RL
Un circuit associant un résister, de résistance R = 50 fl, en série avec une bobine idéale,
d'inductance L = 100 mH, est alimenté par un générateur qui délivre la tension sinusoïdale
e{t) = Es/2cos{(x)î) avec E = 10 V .
1. a) Trouver l'expression de l'intensité du courant dans le circuit. Quelle est sa valeur efficace et
son déphasage, d'abord pour la fréquence / = 50 Hz , puis pour / = 100 Hz ? Pour quelle valeur de /
le courant est-il en retard de phase de tt/A rad sur la tension ?
b) Tracer les graphes donnant l'amplitude et le déphasage de i(t) par rapport à e{t) en fonction
de la fréquence /.
2. Déterminer la tension aux bornes de la bobine. Tracer le graphe représentant son amplitude en
fonction de /.
P2- 2. Mesures de tension à l'aide d'un voltmètre
Dans le circuit représenté sur la figure 2.31, un voltmètre fonctionnant en régime sinusoïdal est
connecté successivement aux bornes du résister, de la bobine et du condensateur : il indique respectivement 15 V, 10 V et 30 V.
1. Quelle est l'indication du voltmètre aux bornes de la source de courant ?
2. Calculer la puissance fournie par cette source pour R= 100 fi.
C
FIG. 2,31.
P2- 3. Nature de dipôles inconnus
On désire identifier trois associations (en série ou en parallèle) de deux dipôles choisis parmi les
trois suivants : une bobine idéale, un condensateur et un résistor. Les dipôles obtenus sont notés D\ ,
D2 et Z>3 . En régime stationnaire, la mesure des résistances donne respectivement : R\ — Ri = 50 fi
et /?3 — 00 . En régime sinusoïdal, on observe que :
i) quelle que soit la fréquence /, la tension u\ aux bornes de D\ est en avance sur l'intensité i\
du courant qui le parcourt ; en revanche, pour £>2 , 112 est en retard sur Ï2 ii) aux basses fréquences, la tension M3 aux bornes de D3 est en retard sur Ï3 ; aux hautes fréquences, c'est l'inverse.
1. Déterminer la nature de chaque association et les dipôles qui la constituent.
2. Quels résultats obtiendrait-on avec les autres associations possibles ?
77
Lois de base des circuits en régime quasi stationnaire
P2- 4. Lecture à Toscilloscope
Un circuit comportant une bobine réelle (inductance L en série avec un résistor r) et un résistor,
de résistance R = 20 Ll, est alimenté par un générateur de tension : e{t) = em cos{ojt). Un oscilloscope, connecté comme l'indique la figure 2.32a, fournit les courbes de la figure 2.32b. Les calibres sélectionnés sont de 1 V ■ carreau-1 pour l'échelle verticale et de 2,5 ms • carreau-1 pour le balayage
horizontal.
1. a) Déterminer la fréquence et la valeur efficace de la tension appliquée. Même question pour le
courant.
b) Calculer la valeur du déphasage observé entre les deux tensions. En déduire les valeurs de r
et L.
2. a) On intercale, entre les points A et C, un condensateur de grande capacité C = 112 jjlF ; on
obtient les courbes de la figure 2.32c, sans modifier les réglages de l'oscilloscope. Calculer l'intensité
efficace dans le circuit.
b) Retrouver les valeurs de r et L.
Voie B
Voie A
L
mm
B
R = 2011
sh
carreaux
7777
b)
a)
c)
FIG. 2.32.
P2- 5. Réseau en régime sinusoïdal - webDans le circuit de la figure 2.33, la tension e = emcos{o)î) est imposée par un générateur de
tension parfait. Avec un voltmètre, on mesure la tension us aux bornes du résistor R .
1. a) Trouver la relation entre us et e, en fonction de R, Z et Z'.
b) Établir la relation entre les intensités ^ et ^ , en fonction de R , Z et Z'.
2. a) Que deviennent les relations précédentes si Z est une résistance R' et Z' l'impédance d'une
capacité C ?
b) Déterminer le rapport des amplitudes us^mjem et
R' = 2,2 kfi et / — 1,0kHz.
pour R = 1.5 kfi, C = LOjjlF,
"1
T
R'
B
Z'
M
UA
R
R'
FIG. 2.33.
FIG. 2.34.
2. Lois de base des circuits en régime quasi staîionnaire
78
VI- 6. Circuit déphaseur
Le circuit de la figure 2.34, dans lequel e = em cos{ù)t), représente un circuit déphaseur. Le GBF
étant à masse flottante, on adopte comme masse du circuit le point M .
1. Comparer, en amplitude et en phase, les tensions ua et ub . À quoi peut servir un tel circuit ?
2. Représenter graphiquement l'avance de phase de ub sur uA. Pour quelle valeur de R les tensions ug et Ua sont-elles en quadrature, lorsque C = 0,22 jjlF et / = 1,2 kHz ?
P2- 7. Impédances équivalentes '
On alimente un moteur, composant inductif représenté par une bobine, d'inductance L et de résistance R, par un générateur sinusoïdal qui maintient la tension e{î) = em cos(<yf) à ses bornes. On
connecte, en parallèle, un condensateur de capacité C en série avec un résister de même résistance R
(Fig. 2.35a).
L Exprimer l'impédance Zab en fonction de co .
2. Pour quelle capacité C ce montage est-il équivalent à celui de la figure 2.35b ? Calculer sa
valeur pour R = 220 O et L = 330 mH . Déterminer alors la valeur numérique de l'impédance entre
A qî B. Quel est l'intérêt de ce choix de capacité, relativement à l'ouverture de l'interrupteur K ?
A
mmn
L
R
B
c
e
e
rs->
R
b)
a)
Fig. 2.35.
P2- 8. Absence de variation de courant à la fermeture d'un interrupteur
Dans le circuit de la figure 2.36, on souhaite que l'indication donnée par l'ampèremètre ne varie
pas lorsqu'on ouvre ou lorsqu'on ferme l'interrupteur.
Quelle valeur de la capacité C faut-il choisir ? Calculer C sachant que L = 22 mH, R = 330 fl,
r = lOO et que la fréquence du GBF est de 50 Hz .
Xmm, ^QQOowo^ooooooo.
C
C
C
^
C
U2
7777"
FlG. 2.36.
7777
7777
Fig. 2.37.
7777"
«3
Lois de base des circuits en régime quasi stationnaire
79
P2- 9. Cellules à retard de phase
La figure 2.37 représente une ligne infinie, constituée de cellules identiques LC. On impose, avec
un générateur parfait, la tension uo{t) = em cos(W) .
1. Établirlarelation de récurrence existant entre un+i , un et un_l ; on introduira coq = 1/(LC)1//2
2. On cherche une solution de cette équation sous la fonne un = m0 d' avec i/0 = em expijcot).
a) Déterminer q pour co > Imq .
b) Pour co < Iojq , montrer que a est de la forme a = exp[/<£{û>)] et déterminer la phase 4>{o)).
c) On suppose que co
coq et on pose r —
, sachant que cj) est négatif. Établir l'expression
de r en fonction de L et C . Application numérique pour L = 0.68 mH et C = 22 pF . Donner une
interprétation physique de l'expression obtenue pour u„ .
P2-10. Impédance itérative
Le circuit représenté sur la figure 2.38 est alimenté par un générateur de tension sinusoïdale :
e = em cos(W).
1. Exprimer l'impédance Z^b , en fonction des impédances Z\ , Zo et Zc .
2. Déterminer la valeur de Zc pour laquelle Zc = Z^b ■ Pourquoi cette valeur de Zc est-elle
qualifiée d'impédance itérative ?
s
w
3. On conserve la valeur précédente pour Zc . Etablir la relation que doivent vérifer Z\ , Z2 et Zc
afin que im = ïm .
4. a) Si Z| est un condensateur, de capacité C = 68 nF et Z2 une bobine, d'inductance
L = 1,5 mH , quelle impédance Zc faut-il prendre ?
b) Même question avec Z\ , bobine d'inductance L = 1,5 mH et Z2 , condensateur de capacité
C = 68 nF ?
A
Z,
'-É ■^n
Z2
z,
il
FIG. 2,38.
R
L
FIG. 2.39.
P2-11. Puissance dans deux branches en parallèle •web
Dans le circuit de la figure 2.39, on désire que les deux branches absorbent la même puissance
moyenne lorsqu'on connecte un générateur de tension sinusoïdale entre A et B : e = em cos{cot).
Détenniner l'inductance L en fonction de la résistance R et des capacités C et C . Calculer L
pour R = 11 kO, C = 15 jxF, C' = 22 jxF, à la fréquence / = 1 kHz.
2. Lois de base des circuits en régime quasi stationnaire
80
VI-12. Mesure de puissance à l'aide d'un voltmètre
On dispose d'un voltmètre et d'un résister, de résistance R connue, pour mesurer la puissance
dissipée dans une impédance Z inconnue. On effectue les mesures indiquées sur la figure 2.40.
1. Déterminer la puissance dissipée dans l'impédance Z , en fonction des tensions U\ , U2 et t/3
lues sur les trois voltmètres.
2. Calculer cette puissance pour f/| = 20 V, f/2 = 147 V, f/3 = 162 V et /? = 10 O.
3. En déduire la résistance et la réactance de l'impédance Z.
R
^
Z
I-
^
U\
IU2
Û3
^
FlG. 2.40.
P2-13. Puissance consommée dans un circuit industriel
vveb 1
-
Le circuit de la figure 2.41 est alimenté par le réseau basse tension d'EDF : fréquence / = 50 Hz ,
tension efficace U = 230 V .
1. Exprimer, en fonction des données sur la figure, la puissance dissipée par ce circuit.
2. On constate que la puissance fournie par le générateur atteint une valeur maximale Vm pour
i? = 20 El. En déduire la valeur de L' et celle de Vm .
3. Pour une valeur de R supérieure à 20 O , le facteur de puissance devient égal à 1 et la puissance
consommée est de 500 W. En déduire les valeurs de i? et C , sachant que L = 100 mH .
1
L'
230 V
50 Hz
L
C
R
r*
230 V
50 Hz
Fie. 2.41.
R
C
Fie. 2.42.
P2-14. Facteur de puissance d'une installation et relèvement
Dans une installation alimentée par un réseau basse tension (/ = 50 Hz et tension efficace
U = 230 V ), on fait fonctionner simultanément un moteur de puissance Vm ■> dont le facteur de puissance vaut 0,65 , et une rampe d'éclairage de résistance R, de puissance Vr , branchée en parallèle et
de facteur de puissance égal à 1 (Fig. 2.42).
1. Calculer les valeurs efficaces complexes des intensités des courants dans les différentes parties
du circuit, en fonction de U, Vm , Vr et du déphasage (p de la tension par rapport au courant qui
parcourt le moteur.
2. En déduire le facteur de puissance de l'ensemble. Application numérique pour Vm = 5 kW et
Vr = 3 kW. Retrouver ce résultat à l'aide du théorème de Boucherot.
Lois de base des circuits en régime quasi sîaîionnaire
81
3. Quelle est la valeur de la capacité du condensateur qu'il faut placer en parallèle sur l'installation
pour relever le facteur de puissance jusqu'à 1 ? Rappeler l'intérêt d'avoir un facteur de puissance proche
de l'unité.
P2-15. Exemple tiré de la publication originale de Boucherot
Dans sa publication originale, Boucherot illustre le théorème qui porte son nom, avec l'exemple
suivant. On alimente, à l'aide d'une tension sinusoïdale, de valeur efficace Ue , une ligne d'impédance
Z; = 20 + y 30 en ohm, au bout de laquelle se trouve l'enroulement primaire d'un transformateur. La
tension efficace aux bornes de cet enroulement étant U\ = 4 kV, sont branchés en série, aux bornes de
l'enroulement secondaire du transformateur (Fig. 2.43) :
i) un moteur synchrone A de puissance apparente 10 kVA et de cos cp — 0,8, dans lequel le
courant est en avance sur la tension,
ii) deux moteurs asynchrones, B de 20 kVA et de cos ^ = 0,9, C de 5 kVA et de cos «p = 0, 8 ,
dans lesquels la tension est en avance sur le courant,
iii) une série de lampes D, de puissance 10 kW,
iv) un condensateur E de puissance réactive 2 kVAR.
1. Effectuer les bilans de puissances active et réactive dans le circuit comportant l'enroulement
secondaire du transformateur et déterminer les puissances active et réactive fournies par le secondaire.
2. Sachant que les pertes du transformateur sont de 2,5 % pour la puissance active et de 5 % pour
la puissance réactive, calculer l'intensité efficace dans le primaire.
3. Trouver la valeur de la tension efficace Ue .
Moteurs asynchrones
Moteur synchrone
Primaire Secondaire
FIG. 2.43.
P2-16. Importance du fil neutre en triphasé
On alimente, en triphasé (/ = 50 Hz et tension efficace de phase 230 V ) les trois enroulements
d'un moteur que l'on assimile à trois bobines idéales, d'inductance L. Initialement, le branchement
présente la configuration en étoile (Fig. 2.44a).
1. Déterminer l'intensité io du courant dans le fil neutre ; en déduire l'intérêt de l'alimentation en
triphasé.
2. Suite à une erreur de branchement, l'enroulement 1 se retrouve en parallèle avec un résister, de
résistance R. Le montage en étoile n'est plus équilibré. Déterminer l'intensité ig du courant dans le
fil neutre ainsi que les tensions
aux bornes de chaque enroulement. Calculer la valeur efficace de Lq
pour R = 100 ù et L = 0,22 H.
82
2. Lois de base des circuits en régime quasi stationnaire
3. Suite à un incident, le fil de neutre est coupé (interrupteur K ouvert). L'enroulement 1 étant
toujours en parallèle avec le résister R, détenniner les tensions aux bornes de chaque enroulement.
Quel est l'intérêt de la présence du fil neutre sur un montage en étoile équilibré ?
4. La connection est maintenant en triangle et le résistor R n'est pas branché (Fig. 2.44b).
a) Trouver la tension
aux bornes de chaque enroulement, l'intensité jki du courant dans chaque
enroulement ainsi que dans les fils de phase 4 .
b) Calculer les valeurs efficaces des grandeurs déterminées précédemment.
5. L'enroulement 1 est de nouveau en parallèle avec le résistor R . Quel est alors le courant dans
chaque fil d'alimentation ? Application numérique.
T—
12
1J
Z,
«12
*731
Zn
Z2
m.
Vi Ji
Z3
V2
'3
JL
31
Z23
«23
V2
«31
Z
1/23
'2
V\
X
I V3
10
a)
b)
FIG. 2.44.
P2-17. Mesure de puissance en triphasé
Le réseau triphasé de la figure 2.45a alimente, sans fil neutre, sous 230 V de tension efficace de
phase, trois récepteurs inductifs identiques montés en étoile.
WA
w
X
X
«13
>2
W*
X
J
R
«23
13
«23
J
a)
n
b)
FIG. 245.
1. Exprimer la puissance active totale V et la puissance réactive totale Q, en fonction du facteur de puissance et du module |Z| de l'impédance de chaque dipôle. Application numérique pour
|Z| = 80 O et cos = 0,5 . Quelle est l'indication de chaque wattmètre ?
2. On ajoute alors un résistor, de résistance R = 100 fi entre la phase 2 et la phase 3 (Fig. 2.45b).
Déterminer la nouvelle expression de la puissance active totale V et la puissance réactive totale Q'.
Quelles sont alors les indications des deux wattmètres ?
Lois de base des circuits en régime quasi sîationnaire
83
P2-18. Séquence des phases en triphasé
Sur un réseau triphasé, il est parfois nécessaire de connaître l'ordre successif des phases, lorsque
l'on veut fixer le sens de rotation d'un moteur ou que l'on souhaite brancher en parallèle des lignes
triphasées. Avec les notations habituelles, on a :
Ul = U]
U2 = U{ exp (-j^Y
et
U3 = U\ exp
= U i exp
les trois phases passent par leurs valeurs maximales, dans l'ordre chronologique 1,2.3. Les numéros affectés sont arbitraires, car les phases se succèdent indéfiniment avec un déphasage de 27r/3 . Afin
de déterminer l'ordre des phases, on branche en étoile, sans neutre, les trois dipôles suivants ; un condensateur, de capacité C, et deux lampes, de même résistance R , comme sur la figure 2.46. On observe
que l'une des lampes brille plus que l'autre.
Déduire du calcul de la puissance dissipée dans chacune des lampes l'ordre des phases,
condensateur-lampe brillante-lampe faible ou condensateur-lampe faible-lampe brillante.
C
R
ylb
R
C
le
>Fig. 2.46.
Oscillations électriques harmoniques,
amorties, forcées. Résonance
Les oscillations harmoniques, amorties, forcées ont déjà été vues en mécanique à partir de
l'exemple concret d'un pendule élastique (cf. Mécanique). Nous nous proposons ici de considérer des
oscillations analogues, dans le cadre purement électrique où elles jouent un rôle au moins aussi important.
Pour cela, nous commençons par l'oscillateur électrique harmonique, lequel est constitué d'une
bobine d'induction et d'un condensateur. Nous étudions ensuite l'influence des phénomènes dissipatifs associés au caractère partiellement résistif des composants. Enfin, nous analysons les oscillations
électriques forcées dans un dipôle RLC, excité par une tension sinusoïdale, et donc le phénomène de
résonance.
I. — OSCILLATEUR HARMONIQUE EN ÉLECTRICITÉ
1.1. — Définition
Un oscillateur électrique harmonique, ou sinusoïdal, est un système dont l'un des paramètres x{t),
qui est soit l'intensité du courant i(t) dans le circuit soit la tension u(t) aux bornes de l'un des composants, varie au cours du temps suivant une loi sinusoïdale :
.xfr) = xm cos{o)Qt + ^) = xm cos(27r/of + ^>)
Dans ces expressions, xm, wq , /o,
et Tq = 1 //o sont des constantes appelées respectivement
l'amplitude, la pulsation, la fréquence, la phase à l'origine des temps et la période (Fig. 3.1).
, i *(0
0
Fig. 3.1.
85
Oscillations électriques harmoniques, amorties, forcées. Résonance
Comme en mécanique, toute l'importance des oscillations harmoniques repose sur la possibilité de
représenter une oscillation quelconque par une somme d'oscillations harmoniques de pulsations différentes (cf. annexe 2).
1.2. — Mise en évidence expérimentale
Le circuit électrique fermé de la figure 3.2a est constitué d'un condensateur de capacité C, d'une
bobine d'inductance L et d'un conducteur ohmique de résistance R , placés en série.
Si le condensateur est initialement chargé, c'est-à-dire si son armature A a une charge q et son
armature B une charge opposée —q, on constate qu'il se décharge dans le reste du circuit, de façon
oscillante : q varie au cours du temps suivant une loi sinusoïdale amortie. On met en évidence une telle
variation en visualisant sur un oscilloscope la tension uc = qjC aux bornes du condensateur. On rend
possible cette visualisation en utilisant un générateur de signaux carrés qui reproduit périodiquement
l'excitation initiale du condensateur.
R
R
n_
n_
A
%
q
uc
'c"'
I—n
L
Résistance
négative
A
uc
1
C '
L
1
—wœr
b)
■à)
Fie. 3.2.
■a
o
c
3
û
(M
i—l
On supprime l'amortissement observé en ajoutant au circuit série RLC une « résistance négative »,
ce qui permet de compenser le terme résistif (cf. chapitre 8 et 14). Une telle résistance peut être obtenue, par exemple à l'aide d'un composant à résistance dynamique négative comme une diode à effet
tunnel ou un tube à décharge. On préfère utiliser aujourd'hui un système actif tel un amplificateur opérationnel comme le montre la figure 3.2b ; conformément à l'usage, la source auxiliaire d'énergie n'a pas
été représentée sur le schéma équivalent. On obtient approximativement un oscillateur harmonique électrique dont on peut vérifier l'expression de la période Tq = Itr jcoQ = 27r(LC)1/2 .
Ordre de grandeur : dans un circuit électrique typique, où L = 0,1H, C — IOjxF, R= 100 H,
muni de la résistance négative d'environ —100 fl, on trouve :
fo»o = 103 rad - s-1
d'où
/o = 159.15 Hz
et
Tq = 6,28 ms
©
4-1
.C
1.3. — Equations différentielles caractéristiques
D.
0
a) Loi des mailles : équation différentielle du second ordre
La loi des mailles, appliquée à un tel circuit en régime quasi stationnaire, donne (cf. chapitre 2) :
q
Tdï
— = —L
C
dt
„.
Ri
.
soit
L
df
q
„
\- Ri -]— = 0
dt
C
.
puisque
F
4
.
dq
i = —
dr
86
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
q étant est la charge de l'armature A du condensateur vers laquelle est orienté le courant d'intensité i.
Il en résulte l'équation différentielle canonique, en utilisant la notation habituelle pour toute dérivée par
rapport au temps (cf. Mécanique) :
..
q
0
r.
^o)^q = ri
Tp
avec
il-\
coq = \ —
V
/
et
^
Te = iv
Ce système électrique est dynamiquement équivalent à l'oscillateur mécanique amorti : la correspondance entre les différentes grandeurs est donnée dans le tableau 3.1. Le rôle de la charge q est tenu par
celui de la position x, celui de i par la vitesse v ; dans ce contexte l'inductance L remplace la masse
m , la capacité C apparaît à la place de l'inverse l/K de la raideur, enfin la résistance R se substitue au coefficient d'amortissement a .
Electricité
q
Mécanique
x
i
L
v
C
R
]
m
K~
a
Tab. 3.1.
L'oscillateur est hanuonique, lorsque le terme dissipatif, qui est proportionnel à l'intensité du courant, est nul ou négligeable. L'équation différentielle se réduit alors à :
d2qq
L dr1
+
C
...
S01t
9
^
^=
n
v
0
ou
f ^ \1^2
Ù)Q=
\ ïfc]
est la pulsation propre. La solution d'une telle équation est bien connue (cf. annexe 1). Elle peut prendre
les différentes formes suivantes :
q{î) — A cos(û)ot) + Bsw(coot) = qm cos(tuot + f)
qm = (A2 H- jÇ2)1/2
et
tan f = ——
A
Remarque : Il convient de souligner que, pour un tel oscillateur, les conditions initiales n'ont d'influence que sur l'amplitude et la phase et non sur la fréquence.
b) Conservation de l'énergie : équation différentielle du premier ordre
On passe de l'équation différentielle du second ordre à l'équation du premier ordre correspondante,
en multipliant la première par q et en intégrant :
qq + ojQqq = 0
donne
q2
~2 ^
q2
^^2
co
=
^'t:e
Pour interpréter cette dernière équation, il suffit d'expliciter <Wq et ainsi faire apparaître l'énergie
électromagnétique du condensateur et de l'inductance, respectivement q2/{1C) et Lq2/l = Li1 /2
(cf. Électromagnétisme) :
— + ^=£em
2
2C
Ainsi, dans l'oscillateur harmonique électrique, l'énergie électromagnétique se conserve en changeant
périodiquement de nature, électrique dans le condensateur puis magnétique dans la bobine, comme
l'énergie mécanique d'un pendule simple change périodiquement de nature, potentielle puis cinétique.
87
Oscillations électriques harmoniques, amorties, forcées. Résonance
Explicitant q(t), l'énergie électromagnétique de l'oscillateur s'écrit :
^ —
_
t'em
L< 2
^?
2
i ^^ —
2C
Lù)lql
2
sin2(fc»or + ^)
+
^ cos2(^o/ + 0) =
2
2
Ainsi l'énergie £em de l'oscillateur harmonique est une constante qui est proportionnelle au carré t?2
de l'amplitude. Le graphe de la figure 3.3 montre bien qu'au cours du temps, il y a transformation
d'énergie magnétique en énergie électrique et vice-versa.
Notons que l'écriture directe de la conservation de l'énergie électromagnétique dans un tel système
conservatif permettrait de restituer l'équation différentielle du second ordre en dérivant par rapport au
temps et en simplifiant par q, la solution ^ = 0 ne présentant aucun intérêt.
* \
2C
L2/2
FTG. 3.3.
II. _ OSCILLATEURS AMORTIS PAR UN ÉLÉMENT RÉSISTIF
Au cours de la décharge d'un condensateur dans une bobine, on constate généralement que l'amplitude des oscillations de la charge q du condensateur, que l'on visualise par la tension uc = q/C
aux bornes du condensateur, n'est pas constante, mais décroît constamment, ce que l'on attribue au caractère partiellement résistif des composants; s'introduit alors naturellement la tension Ri = Rq aux
bornes d'un élément résistif équivalent.
s
II. 1. — Equation différentielle de la décharge du condensateur
Rappelons l'équation différentielle canonique de la décharge du condensateur que fournit la loi des
mailles :
■■
Q
y
o
I
^
q-\- — + (oQq = 0 avec co0 = — et re = T (/
i\
Le terme d'amortissement étant proportionnel à q, cette équation différentielle est, elle-aussi, linéaire :
toute combinaison linéaire de solutions est aussi une solution.
II. 2. — Nature de la décharge
En cherchant des solutions de l'équation différentielle en exp(rr), on trouve l'équation caractéristique du deuxième degré suivante ;
O
f
Os-,
r~ H
h û>q = 0
fe
dont les solutions sont :
88
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
La solution q(t) la plus générale se met donc sous la fonue d'une combinaison linéaire des deux
solutions exp(r|t) et expf/^t) (cf. Mécanique) :
q{t) = Di expfn t) + D2 exp{r2t)
Suivant les valeurs du produit sans dimension :
Q = (ooTe
appelé facteur de qualité, on distingue trois types d'évolution.
a) Oscillateur faiblement amorti (Q> 1/2)
Lorsque O > 1/2 , ce qui est le cas le plus fréquent, on a, en introduisant j1 = —\ :
r=
^±>-
où
=6,0 f1 ^ i)
est la pulsation en présence d'amortissement ou pseudo-pulsation. On en déduit :
q(t) = Dexp fj cos((oaî + (j)a)
On détermine les constantes D et
à l'aide des conditions initiales sur la charge et sur l'intensité du
courant. Supposons qu'à l'instant / = 0 on ait <? = 0 et £? = *0 ; d vient alors :
^(0) = 0 = D cos fa
et
^(0) = Iq = D
sin (f)a — -— cos (f)aj
car q = Dexp [—//(2Te)] [—o)a sin(û>rt/ + ff) — 1/{2Te) cos{a)at + 4>a)]. Il en résulte :
fa = ic rad
2
D = ——
(On
et
^(r) = — exp
COn
\
2t„
) sin(w0r)
Remarque : Contrairement à l'exemple mécanique du pendule élastique (cf. Mécanique), ces conditions initiales, q = 0 ei q = f , sont plus difficiles à réaliser que q = qo et ^ = 0 , mais
la solution mathématique est un peu plus simple, d'où notre choix.
Sur la figure 3.4a, on a représenté le schéma du dispositif électrique : aux bornes du condensateur,
on connecte un générateur d'impulsions ; entre deux impulsions, la tension aux bornes du condensateur
et donc sa charge varient bien comme le prévoit la théorie précédente (Fig. 3.4b). L'allure de la courbe
q{t) est caractéristique d'un mouvement oscillatoire amorti, de pseudo-période Tcl :
On voit que Te est la durée au bout de laquelle l'amplitude de la charge est divisée par e1^2 « 1,5.
Comme cette amplitude est pratiquement nulle après quelques valeurs de re, on dit que Te caractérise
la durée de vie de ces oscillations amorties et on l'appelle la durée de relaxation en énergie (Fig. 3.4b).
Oscillations électriques harmoniques, amorties, forcées. Résonance
89
Q> ^
exp
2r
o
Oscillateur peu amorti
/
l
z/
o
t
exp - —
(Ûa
\ 2Te
b)
a)
FlG. 3.4.
On note aussi que la durée de relaxation de la charge q{î) vaut le double de celle définie ici : Ta = 2Te .
La pseudo-sinusoïde est en contact avec les courbes d'équations :
et
exp _
f W = r"
(\ 2T"
(On
2.T.
^2(0 =
^0 ex
P
(Or
"
2r.:
qui délimitent la zone au sein de laquelle q{t) évolue. Déterminons les instants tc pour lesquels ^ = 0 :
sin(^L)
«KG = 7rexP
(On
\
2tp
2T o
ù)a cos(ù}atc)
=0
d'où :
itm(o)atc) = 2ù)aTe
1
nT
tc — — arctan(2&>are) H——^
(On
2
et donc
avec
n
entier
Le rapport coa/coq , qui est toujours inférieur à l'unité, est supérieur à 0.97 pour Q > 2 . Pour Q =
,
ce qui est une valeur typique d'un oscillateur électrique suffisamment amorti, (oa/mq « 0,999 . Lorsque
Q est très grand, précisément Q^> 1 /2, on peut utiliser les expressions approchées suivantes :
(Or
wo I 1 —
1
et donc
8£L
7^ « Tq ( 1 +
1
8£p
L'expression précédente de tc calculée dans les conditions initiales précédentes se réduit alors à :
1 tt
nTa
Ta
nTa
(oa 2
2
4
2
Remarques : 1) Le choix de Te, plutôt que Ta = 2Te, revient à privilégier le concept d'énergie d'un
oscillateur par rapport à celui d'amplitude ; il est fortement suggéré par la définition de la
durée de relaxation introduite dans les oscillateurs en physique moderne.
2) Le facteur de qualité d'un oscillateur harmonique est infini.
3) La lecture du nombre umax de maxima d'oscillation, au-dessus d'un certain seuil, permet d'estimer le facteur Q. En effet, considérant un seuil de 5% de l'amplitude maximale, on a, d'après l'expression de q{r) :
eX
P V
ïr~)
= 0 05 =
'
2^
avec
ts = nmmTa +
90
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
Il en résulte :
1
t
4
2re, _
In 20
In 20 = ù)aTe
Tn
TT
=
d'où f7max « 0,95 <2 — 0- 25 , si 0 > 10, ce qui est souvent le cas.
i) Décrément logarithmique
On caractérise aussi la décroissance de l'amplitude d'un oscillateur électrique amorti par son décrément logarithmique A défini comme suit :
1
a = 1
A
In T —
n
lq{t + nTcl)_
q{t) et q{t + nTa) étant les charges du condensateur à des instants séparés par un nombre entier de
périodes. On a ainsi :
1
f
D &xp{—t/2Te) cos{coat +
\
A = - in <
r 7
^
.
n
[ D exp[—(ï + nTa) j2Tt\ cos[ù)at + fa,
d'où:
2Te
Retenons que A est le rapport de la durée de la pseudo-période du mouvement sur la durée de relaxation
en amplitude Ta = 2Te .
Exemple : la durée de relaxation re d'un oscillateur électrique, de pseudo-péri ode Ta = 1 ms,
dont la charge q a une amplitude qui est divisée par quatre au bout de cinq oscillations, est obtenue
selon :
T
1
re = —A avec A = - In 4 ^ 0.28 d'où
^ 1,8 ras
2A
5
'
ii) Facteur de qualité et perte d'énergie relative
On caractérise souvent l'amortissement de l'oscillateur par le facteur de qualité Q . Montrons que
Q est relié à la perte d'énergie relative d'un oscillateur très peu amorti. Il vient, pour
1 et donc
Ma ~ û>0 :
(Lil\
2
2C
\2ùjï)
(
eXP
V
t \ ( T
7/ I
,
/
sin(&)ar)l2
C0S Wn
(
^
2T—
7.7.
s
+ û>0sin
Or, le tenne entre accolades vaut pratiquement co^ . Par conséquent :
|)exp(7)^=-"(0)exp(7)
On en déduit la perte d'énergie relative par unité de temps :
1 d£em _ J_
Egfft d t
ra
ce qui donne, pendant une durée égale à la pseudo-période Ta :
-àSem
f,
277
—
« — = —
£em
Te
Q
et
Q = 2'tt
-&£em
Ainsi, le facteur de qualité de l'oscillateur fournit une mesure de l'inverse de sa perte d'énergie relative
pendant une durée égale à une pseudo-période.
91
Oscillations électriques harmoniques, amorties, forcées. Résonance
Ordre de grandeur : le facteur de qualité d'un oscillateur électrique, dont le décrément logarithmique est A = 0,28, vaut Q = tt/A = 11,2.
b) Oscillateur très amorti (Q < 1/2)
Pour Q < 1/2, la solution de l'équation caractéristique du deuxième degré est :
1/2
r = -^±P
avec
^ =-o (^ - 1
La charge se met donc sous la forme :
q{î) = exp f - — j [Dj exp(/3r) + LL exp(-/3/)]
Avec les mêmes conditions initiales que précédemment, on trouve (Fig. 3.5) :
4W = | exp ^"27 j sinhO)
Notons que la décroissance des courbes sans oscillation est d'autant plus lente que /S est grand et donc
Q plus petit.
Q <
Oscillateur très amorti
Cas critique
FIG. 3.5.
FIG. 3.6.
c) Amortissement critique (Q = 1/2)
Lorsque Q = (ooTe = 1/2, l'équation caractéristique du deuxième degré admet une racine double
r = — l/(2Te) ; D\ exp[—r/(2Te)] est une première solution de l'équation différentielle. Cependant
q{t) = D2t exp[—t/{2Te)] est aussi une solution, puisqu'en injectant cette expression dans le premier
membre de l'équation différentielle canonique q q/Te + co^q = 0 , on trouve bien :
D2 exp
2r.
1
2t
+
(1"2/
Te l1
lTe
lTe
co;
=0
Il en résulte que q{t), qui est une combinaison linéaire des deux solutions, se met sous la forme suivante,
pour £>=1/2 :
q(t) = exp (-^7) Pi +^2?)
Dans les mêmes conditions initiales que précédemment, on trouve (Fig. 3.6) :
q{t) = îq t exp
r
2r.
92
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
L'amortissement est qualifié de critique, car il définit la frontière des deux cas précédents. Dans la
pratique, on règle souvent l'amortissement près de sa valeur critique afin que la décharge soit la plus
rapide possible.
II. 3. — Diagramme de phase
Par analogie avec l'espace des phases en mécanique, l'espace des phases ou l'espace des états
d'un oscillateur électrique est le plan cartésien {q,q) dans lequel q désigne la charge du condensateur
(cf. Mécanique).
a) Oscillateur harmonique dans Vespace des phases
D'après l'équation de conservation de l'énergie électromagnétique, on a (Fig. 3.7) :
'■2
il
2C
Lr
„
„
Sem = Cte
soit
cf
a2
o~
= 1
.
/2£,
a = {2C 8em)^2 et h — .
\ Lj
avec
1/2
Dans l'espace des phases bidimensionnel, le point représentatif de l'oscillateur harmonique décrit donc
une trajectoire elliptique.
col Amortissement
faible
/Amortissement
critique (parabole)
O
Amortissement
fort
If Te
FIG. 3.7.
FIG. 3.8.
b) Oscillateur amorti dans l'espace des phases
On a vu que, lorsque l'oscillateur était amorti par un résistor, la résolution de l'équation caractéristique du deuxième degré donnait les solutions suivantes :
r=
1
2t,
±
1
4T2
1/2
- (O?
On répertorie parfois les différents cas dans le plan cartésien ( l/Te, coq ) (Fig. 3.8) ; comme l/Te et
coq sont positifs, seul le premier quadrant convient ; dans ce plan, la courbe donnant û)q en fonction de
1 jTe, à l'amortissement critique, est une parabole puisque :
COr, —
1
1
4T^
2T.
Sur l'axe des ordonnées, pour lequel l'amortissement est nul, on retrouve le cas harmonique : r = ±jojo .
Les points situés entre l'axe des ordonnées et la parabole correspondent à des oscillateurs faiblement
amortis. Ceux qui sont situés au-dessous de la parabole représentent les oscillateurs fortement amortis.
Il est instructif de représenter la courbe des points figuratifs dans l'espace des phases {q, q) . C'est
une spirale convergente, lorsque l'amortissement est faible (Fig. 3.9a); si l'amortissement est fort, la
spirale se réduit à un nœud (Fig. 3.9b), lequel est qualifié de critique pour Q = (OoTe = 1/2 .
93
Oscillations électriques harmoniques, amorties, forcées. Résonance
Q>
Q<
î\
2
b)
a)
FlG. 3.9.
III. — OSCILLATIONS ELECTRIQUES FORCEES. RESONANCE
La question à laquelle nous nous proposons de répondre maintenant est la suivante : comment se
comporte un oscillateur électrique amorti tel qu'un circuit RLC, lorsqu'on applique à ses bornes une
tension excitatrice sinusoïdale (Fig. 3.10)? Cette question est essentielle car, à l'aide de l'analyse de
Fourier, on peut ramener le cas d'une excitation quelconque à celui d'une somme d'excitations sinusoïdales (cf. annexe 2).
Fig. 3.10.
III. 1. — Source de tension sinusoïdale aux bornes d'un dipôle RLC
Maintenons, aux bornes d'un dipôle RLC, la tension sinusoïdale e{t) = emcos{ù)t + fg)
(Fig. 3.10). La loi des mailles appliquée au circuit donne, si q(t) désigne la charge de l'armature A
du condensateur (cf. chapitre 2) :
dï
L——h Ri +
dt
, s
= eit)
avec
.
dq
i = —
dt
Il en résulte que :
soit, en introduisant ol = \/{LC) et Te = L/R
q -\
\- (oï, a = am cos{
+ a>„ )
avec
an, = —
Notons que l'amplitude em de l'excitation peut a priori être constante ou fonction de la pulsation m
94
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
III. 2. — Réponse linéaire
En théorie des systèmes, on considère l'oscillateur électrique non excité comme un système qui
fait correspondre une réponse ou « sortie » à une excitation ou « entrée » (Fig. 3.11). La question initiale
posée peut alors s'exprimer autrement sous la forme suivante : quelle est la réponse du système lorsqu'on
le soumet à une excitation sinusoïdale ?
Entrée
Sortie
Système
Fig. 3.11.
Pour y répondre, on teste d'abord la linéarité du système. On sait que l'oscillateur amorti par frottement résistif est linéaire ; si on le soumet à une combinaison linéaire de deux excitations ou entrées,
ei(r) et ^(V), de sorties respectives s\{t) et sjit), le système admet, comme sortie, la même combinaison linéaire des réponses :
e(t) = ei{t) + e2(t)
—^
s{t) = s{(t) + S2{t)
Dans ce cas, l'intérêt de l'analyse ne se réduit pas à la seule détermination du mouvement de l'oscillateur
sous l'action d'une tension sinusoïdale. L'étude concerne toute la théorie de la réponse linéaire d'un
circuit électrique, lorsqu'on le soumet à une excitation quelconque. Cette dernière est décomposée en
signaux sinusoïdaux dont on étudie les réponses qu'en donne le système. En recomposant linéairement
ces sorties élémentaires, on obtient la réponse à l'excitation initiale.
Le système se comporte différemment suivant la valeur de la pulsation to de la vibration excitatrice. Le phénomène d'exaltation de certaines grandeurs, que l'on observe lorsque co = coq, est appelé
résonance ; on le retrouve dans plusieurs domaines de la physique.
III. 3. — Régime transitoire et régime établi
La solution de l'équation différentielle précédente :
q + — + (olq = am cos{cot + fe)
Te
est la somme de deux termes :
i) la solution générale de l'équation sans second membre du paragraphe précédent :
q(t) = Dexp
cos{oj(lt + (f)a)
ii) une solution particulière de l'équation totale :
qm cos(ù)t + 4>q)
Entre l'instant initial et une certaine durée, qui dépend de Te , au-delà de laquelle le premier terme est
négligeable devant le second, le régime est transitoire :
q(r) =£>exp (-jr) cos(o)at + (f)fl) + qmco&{o)t + (})q)
Une fois le régime transitoire achevé, on observe le régime établi, caractérisé par l'expression :
q(t) = qmcos(o}t + (})q)
Dans la suite, nous n'étudierons que le régime établi, réservant à une étude spécifique ultérieure le
régime transitoire (cf. chapitre 4).
95
Oscillations électriques harmoniques, amorties, forcées. Résonance
III. 4, — Charge du condensateur en régime établi
Utilisons la méthode complexe pour détenniner la solution particulière de l'équation différentielle
canonique précédente. On sait que cette méthode consiste à associer, à cette dernière, l'équation différentielle suivante à laquelle satisfait la grandeur complexe q = q+jK avec j1 = — \ (cf. Mécanique) :
q + ^ + o}0q = am exp[/(wf + ^)]
-Te
La solution réelle q{î) s'obtient alors en prenant la partie réelle de q{t) . Cherchons une solution
de la forme :
q{t) = qm exp[/(*tf + (^)] = q^ z\p{jo)t) où
= qm exp(/^)
est Vamplitude complexe de la charge. Comme q — —(o2q et q = jojq, il vient :
+j— + (o0J qm = am exp\j{ùjt + ^e)] = ain expijojt)
qm = am exp{j(f>e) étant Vamplitude complexe de l'excitation. On en déduit, en introduisant la pulsation
réduite x = (ojcùq , qui est aussi la fréquence réduite, et le facteur de qualité Q = ù)QTe :
am Qxp{j(f)e)
am exp(j(f)e)
-m
{-(o1 + ojD + jù)/re
Qam expijffce)/Wq
( 1 - x2)
jxioUg +
x\j -PQ(\/x- x]
Il en résulte que q{t) = qm cos(W + (jtq) avec :
&m
— 77
i
2
[{(O- - (O )- +
. / ,
t \
tâtiycpg — (pe)
7
2 / 2'Ml/
/T ]1/2
OifTe
7
(O2 - co2
ce que nous retiendrons sous la forme :
Q aml &>g
et
tan (<£4 — (f)e) =
^[i + e2(^-i/.Y)2]l/2
Q(x- 1 /x)
avec
a,.
III. 5. — Intensité du courant dans le circuit en régime établi
Comme l'intensité du courant dans le circuit est donnée par q , écrivons q sous la forme :
q = im exp [/(&>/ + 4>fi\ =
expijcot)
où
ini = im exp(/0/)
est l'amplitude complexe de l'intensité du courant, im son amplitude et 0,; sa phase à l'origine. Or,
d'après ce qui précède :
q{t) = q expijcot)
d'où
q = jcoq expijcot)
En identifiant, on obtient :
im
=JXù)oq,„ =
Qam expijé,,) /oj()
x
i +jQ{ - i A)
Qqm!coo
1
+JQ{X - 1 A)
96
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
On en déduit :
im
Qam/ojQ
ù) qm
et
[l + Q^x-l/xf]"2
tanÇ^i - (j)e) = -Q
x— i
x
Le courant i(t) — q est ainsi en avance de phase de 7r/2 rad par rapport à la charge q{t) et donc à la
tension aux bornes du condensateur ii{t) = qif/C :
7T
(f>i '■— <f>q + —
.
SOit
(f>i
<pe — (f)q
7T
(pç + —
III. 6. — Admittance maximale : résonance
a) Impédance électrique du circuit RLC
L'impédance du circuit RLC est le rapport de la tension sinusoïdale complexe, imposée par le
GBF, sur l'intensité complexe du courant sinusoïdal qui parcourt le circuit :
z =
emcxp(jo)t)
=^L
L exp(/'w?)
z=|Z|eXR/V
où
i
est la différence de phase entre la tension d'excitation et l'intensité du courant.
Exprimons l'impédance du circuit, en fonction de R, x = cof ù)q et Q . Il vient
Z—R
j \ Lo) -
\
C(o }
=
R
!
iM
i+jôU-V
x .
avec Q = cooTe = Lcoq/R = {/(CcooR), puisque LCcol = 1 . On en déduit :
1/2
|Z| =R
l + Q2
{x~l)
et
tan (p = Q (x
Sur la figure 3.12, on a représenté l'impédance Z dans le plan complexe dans les deux cas,
cp < 0 : R est sa partie réelle et Lto — 1 /{Coj) sa partie imaginaire.
jLio
JLûj
jCa)
Z
R
b)
a)
FlG. 3.12.
1
jCù)
> 0 et
97
Oscillations électriques harmoniques, amorties, forcées. Résonance
b) Admittance électrique du circuit RLC
L'admittance est l'inverse de l'impédance :
1
F=i =
Z
R[l+jQ{x-l/x)]
On en déduit le module et sa phase, respectivement l'inverse et l'opposée de ceux de l'impédance
F = |F| exp(—jjp)
avec
1
|F| =
et
jj2
~V
=
1
arctan Q\
x
R 1 + Q2 {x - 1 /.y) '
c) Résonance
Sur la figure 3.13, on a représenté |F| et —(p en fonction de x pour une valeur détenuinée de Q.
On voit que, pour x = 1 , c'est-à-dire pour une pulsation de l'excitation égale à la pulsation propre du
système, le module de l'admittance passe par un maximum \ Y\max, qui vaut \/R ; l'intensité du courant
est alors en phase avec l'excitation.
~<p(x)
max
A
*~x =
X=
x, 1 x2
co
(oo
co
Û)()
— -7r/2
a)
b)
FIG. 3.13.
On appelle résonance le phénomène physique d'amplification que l'on constate lorsqu'il y a égalité
de la fréquence de la tension excitatrice et de la fréquence propre du circuit oscillant :
CO = (Oq
ou
/ = /o
On estime l'importance de la résonance par la finesse du pic représentant le graphe |F(x)|. Pour cela,
on calcule les valeurs de x pour lesquelles, conventionnellement :
iFl
IFI
ce qui correspond à un rapport des puissances associées égal à 1/2, comme nous le justifierons plus
loin. Il en résulte :
Q2 (x — -]
\
xJ
=1
soit
x— - = —
x
Q
avec
e = ±1
On doit alors résoudre l'équation du deuxième degré x2 — ex/Q —1=0, dont les racines positives
sont :
^, = -— + —K(1 +4e2)1/2
2Q
2Q
'
et
y. = -L
2Q
+
-L(i
2QK
+
4e2)J1/2
*
98
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
Par conséquent, X2 — x\ — 1/£>■ En posant Awi/2
Q=
<*>0
ou
^
Q=
fo
A/i/;
1/2
en fonction de la fréquence. Ainsi, le facteur de qualité Q s'identifie au rapport de la pulsation propre
coq sur la largeur spectrale A&q/2 du pic de l'admittance généralisée à la résonance.
Lorsque Q est grand, c'est-à-dire Awj/2 faible devant coq , la résonance est qualifiée cVaiguë.
Dans des systèmes oscillants électromagnétiques comportant un quartz piézoélectrique, Q peut atteindre des valeurs de l'ordre de 106 (cf. chapitre 14).
Au contraire, si Q est faible, la résonance est dite floue.
Notons que le module de l'impédance |Z| passe, lui, par un minimum pour oj = ùjq , quelle que soit
la résistance R (Fig. 3.14a). A la résonance, l'impédance que présente l'oscillateur au milieu excitateur
est minimale et vaut R. Évidemment, la finesse de l'effondrement de l'impédance est la même que celle
de l'exaltation de l'admittance. Sur la figure 3.14b, on a représenté la phase cp de l'impédance Z.
<p
X=
X=
co
coq
ù)
(Oo
a)
b)
Fig. 3.14.
Remarques : 1) On aura probablement compris que la notation Awi/2 a été choisie pour rappeler que
le rapport des puissances, qui correspond au rapport 1 /-Jl. des admittances, est 1/2.
2) Le choix de privilégier l'admittance et non l'impédance a été motivé par le souci d'une
définition de la résonance qui implique l'exaltation d'une grandeur plutôt que son effondrement, conformément à l'idée intuitive que l'on se fait de ce phénomène.
IV. — AMPLITUDE DE L'ENTRÉE INDÉPENDANTE DE LA PULSATION
Supposons que l'amplitude de l'excitation, en entrée, soit indépendante de la pulsation m , ce qui
est fréquemment réalisé ; c'est le cas d'un dipôle électrique aux bornes duquel un générateur maintient
une tension sinusoïdale e{t) dont l'amplitude em est indépendante de oj .
IV. 1. — Intensité du courant au voisinage de la résonance
a) Amplitude de l'intensité. Résonance d'intensité
L'amplitude de l'intensité du courant s'écrit, en fonction de x et Q :
Qojjij o)o
i + Q2 {x-i/xy
avec am = em/L, Te = L/R et Q = o)oTe .
em
1/2
1/2
R i +Q2{x-\/xy
99
Oscillations électriques harmoniques, amorties, forcées. Résonance
Ainsi pour ^ = 1 , im est maximal et vaut im,max = Cm/R (Fig. 3.15a). Comme l'admittance,
l'amplitude de l'intensité du courant passe par un maximum im,max , pour oj = coq , quelle que soit la
résistance R et donc 0. Il en résulte qu'un moyen d'analyser le phénomène de résonance est d'étudier
la variation de l'intensité du circuit considéré en fonction de la pulsation excitatrice co : on dit qu'il y a
résonance d'intensité.
Cette variation de l'intensité du courant en fonction de la fréquence peut être mise en évidence à
l'aide de l'expérience initiale. Il suffit de considérer la tension Ri{t) aux bornes du résister. On constate
bien que l'amplitude de l'intensité du courant est maximale pour co = coq, quelle que soit la résistance.
fi — fc = —(p
.//?]-TT / 2
X=
0
Cm/Rl--
f/\\
X—
ù)
to
COQ
— TT jl
CÙO
b)
Fig. 3.15.
La finesse du pic d'intensité est la même que celle de l'admittance :
Q
Ùsù) 1/2
ce qui s'écrit
^\/2 Te = 1
puisque
<2 — ^0^
b) Phase de l'intensité
On obtient directement la différence de phase entre l'intensité du courant et la tension excitatrice à
partir de (p , puisque :
4>i -fe = -<P
Ainsi, l'intensité du courant et la tension excitatrice sont en phase à la résonance. Lorsque x varie de 0
jusqu'à l'infini, la différence de phase passe de 77-/2 à —7r/2 (Fig. 3.15b).
Si la résistance est nulle, l'amplitude de l'intensité du courant devient infinie ; la phase, elle, vaut
alors tt/I pour w < <yo et —tt/I pour co > ojq .
Remarques : 1) Du point de vue de la théorie du filtrage spectral d'une excitation par un système, on
peut dire que le circuit se comporte comme un filtre passe-bande, puisqu'il transmet l'excitation avec une efficacité maximale, lorsque celle-ci a une pulsation égale à sa pulsation
propre (cf. chapitre 6).
2) La condition
= 0 permet de déterminer expérimentalement la fréquence de résonance, avec une meilleure précision qu'en recherchant le maximum de l'admittance. En
effet, en mode Lissajous sur un oscilloscope, la tension aux bornes de la résistance, qui est
proportionnelle à l'intensité du courant, et la tension aux bornes du GBF donnent une ellipse qui se réduit à un segment de droite à la résonance. Sur le plan pratique, il faut noter
la contrainte sur la masse, car cette dernière doit être évidemment commune afin d'éviter de court-circuiter le GBF (Fig. 3.16a).
100
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
Voie X>\
Voie X
—nwmL
c
e{t)
R
Voie Y
Voie Y
7777
7777
a)
Fig. 3.16.
IV. 2. — Tension aux bornes du condensateur et charge au voisinage de la résonance
a) Amplitude de la tension et charge
La charge du condensateur étant directement reliée à la tension à ses bornes par q[t) = Cuc{t), il
suffit d'étudier l'évolution de l'une des deux grandeurs, par exemple la tension lorsqu'on veut visualiser
le phénomène sur l'écran d'un oscilloscope (Fig. 3.16b).
L'amplitude réelle qm de la charge du condensateur, s'écrit, en fonction de v et Q :
q.
QOinj o:
i //>
x [1 + Q2{x - l/x)1]111
soit
q,n —
CQe,,
.
[x1 + Q^x2 - 1)2]1/2
puisque am = em/L et LCwq = 1 . Pour analyser la variation de qm , étudions la fonction suivante qui
a la signification d'un facteur de transmission :
m =
1
[jr2 + Ô2U2- i)2]'/2
Il vient, en dérivant :
df
1 +2Q2 (.y2 — 1 )
^ = ^[,2 + 62(,2_1)2]3/2
• .
,
ce qm s annule pour
A
,v = 0
e,
.=
t,
'
= (^1 - —
1/2
Ainsi, l'amplitude réelle de la tension uc,m = qc,mlC vaut em lorsque x = 0, Qem si x = 1 et
s'annule pour x infini.
Deux cas se présentent :
i)Si Q < l/\/2 ^ 0,7, ce qui arrive rarement, l'amplitude de uc,m est maximale pour x = 0,
puis décroît lorsque x augmente. Pour x = 1 , uc,m = Qcm < em .
ii) Si Q > 1/V2, ce qui est souvent le cas, ucym passe par un maximum pour x = xm < 1,
c'est-à-dire pour une pulsation û)m inférieure à la pulsation amortie û)a et donc à la pulsation propre
coq , puisque :
1/2
1/2
1
1
com < (oa < coq avec iûm =
f 1 —
et û)a = coq { 1 —
2Q2 J
^
4Q2
Notons que xm « 1 lorsque Q /§> 1 (Fig. 3.17a). Précisément, pour Q = 5 on a o)m/o)Q = 0,99 .
On met en évidence expérimentalement ce maximum à l'aide du montage de la figure 3.16b : en
faisant varier la pulsation du générateur électrique, on observe aisément, pour une résistance faible, une
forte augmentation de la valeur maximale uc,m de la tension aux bornes du condensateur.
V
A la résonance ( tu = fo»o ), la tension précédente vaut Q em , précisément Q fois la valeur de em ,
d'où le nom de facteur de surtension souvent donné à Q .
Oscillations électriques harmoniques, amorties, forcées. Résonance
101
Soulignons que, contrairement à l'admittance et à l'amplitude de l'intensité du courant, l'amplitude
de la charge qm ne passe par un maximum que si £) > 1/^2, et qu'en outre ce maximum, lorsqu'il
existe, ne se produit pas rigoureusement pour co = ojq . C'est pour cette raison que nous avons évité de
parler de résonance à propos de la charge ou de la tension aux bornes du condensateur.
Remarques : 1) Évidemment, dans le cas limite où il n'y a pas de résistance, l'amplitude Mc> de la
tension devient infinie pour co = mq .
2) La forte surtension précédente n'est pas incompatible avec la nature passive du dipôle
RLC, car cette amplification, supérieure à l'unité, concerne la tension et non la puissance.
ne, m
' fit, — fie = cp - rrjl
Qe*
1
|
co
wo
- K/2'
4v
"-^ôi1
J
^. r-—
Û>0
JT
TT-
a)
b)
Fig. 3.17.
b) Phase de la charge ou de la tension
Concernant la différence de phase
— 4>e , entre la tension aux bornes du condensateur et l'intensité du courant dans le circuit, on l'obtient immédiatement en retranchant 7r/2 rad à la différence de
phase du — (f)e :
- d>e = - f
^
Cette différence de phase varie donc entre 0 et —tt rad, lorsque x passe de 0 à l'infini. Ainsi la
tension et la charge du condensateur sont toujours en retard sur l'excitateur, et ce retard vaut tt/I rad
à la résonance (Fig. 3.17b). Lorsque la résistance est nulle, le maximum est infini et se produit pour
a) = (Oq \ la phase vaut alors 0 si tu < wq et — rad si co > ojq .
Remarques : 1) Ici aussi, du point de vue de la théorie du filtrage spectral d'une excitation par un système, le circuit RLC se présente comme un filtre passe-bande (cf. chapitre 6). Cependant, pour la tension, le filtrage peut être moins efficace si la résistance est trop grande.
Par exemple,
Q < \/s/ï, il n'y a pas de maximum dans le voisinage de la pulsation propre ; c'est alors un filtre passe-bas.
2) On pourrait s'intéresser aussi à la tension aux bornes de la bobine, mais l'analyse reste
formelle, car la résistance de la bobine n'est pas négligeable. Théoriquement, cette tension
s'écrit :
X
Ml,m
jLML =JQer.
i +7Ô0-1 A)
On voit qu'elle est en avance de phase de 7r/2 rad par rapport à l'intensité ; en outre,
l'allure du graphe de son module, en fonction de x, ressemble à celle de la tension «c.m >
mais les comportements aux faibles et aux fortes pulsations sont permutés.
102
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
IV. 3. — Analyse énergétique
a) Puissance électrique reçue par le circuit
A chaque instant, la puissance électrique V[î) reçue par le circuit oscillant, de la part du générateur, par l'intermédiaire du terme em cos{cot + ff), a pour expression (cf. chapitre 2) :
V{t) = e(t)i{t) = em cos(cot +
<?2
im cos{(ot + fj) = —[cos{2ru/ +
2|Zj
+ f f) + cos cp\
puisque im = emj\Z\. La puissance varie donc sinusoïdalement avec le temps autour de la valeur
moyenne V suivante :
V = —r^r COS (p = R-y^ = R —
2\Z\
*
2|Z|2
2
d'après la relation coscp = R/\Z\, ce que l'on établit aisément à l'aide de la représentation de Fresnel
de l'impédance (Fig. 3.12). En remplaçant im par son expression, on trouve :
1
2R 1 + Q2ix - 1 /x)2
Cette puissance moyenne reçue par l'oscillateur sert à compenser la variation de la puissance du circuit,
en raison de l'effet Joule ; en effet, en moyenne, cette variation a pour expression :
=
Ri~
~~Y
Puiscllie
= -^2W = -R%v COS2(wt + fi)
Elle s'écrit aussi, en introduisant l'intensité efficace Ief = im(\/2 (cf. chapitre 2) :
vj=
h) Variation de la puissance électrique reçue par l'oscillateur en fonction de la pulsation
Étudions, en fonction de x: = co/coq = f/fo- pulsation ou fréquence réduites, l'expression de la
puissance moyenne V transférée au circuit oscillant par la tension excitatrice. Cette puissance s'annule
pour les valeurs extrêmes de x et passe par un maximum lorsque x = 1 (Fig. 3.18a) :
1 + <22 (x - 1/x)'
avec
Vmnr =
Si l'on représente cette puissance moyenne en fonction, non de x, mais de V = Igx, on obtient
une courbe symétrique (Fig. 3.18b) d'équation :
i+Q2 [10A' - 10(-A)]
On voit que le transfert de la puissance moyenne de l'excitateur vers l'oscillateur est maximal à la
résonance. Du point de vue énergétique, la résonance est définie, dans ce cas, par le transfert maximal
d'énergie moyenne entre l'excitateur et l'oscillateur.
La largeur spectrale du pic de résonance en énergie s'obtient directement à partir de celle de l'intensité ; rappelons que cette largeur, définie par les pulsations pour lesquelles cette puissance est égale à
la moitié, est telle que :
Aco 1/2
1
— = —
Q
ce qui s'écrit aussi
Aù)\/2 Te = 1
103
Oscillations électriques harmoniques, amorties, forcées. Résonance
v/v
V/Vn
x— —
X — Irab)
a)
FIG. 3.18.
Remarque : Pour observer, avec le montage initial de la figure 3.16a, le pic de puissance transférée
en moyenne à l'oscillateur, une méthode consiste à multiplier le signal d'excitation par le
signal aux bornes de la résistance, à l'aide d'un multiplieur, et à filtrer le produit en ne
laissant passer que le terme stationnaire, lequel est proportionnel à V .
IV. 4, — Applications
a) Réception d'un signal radio
La surtension observée aux bornes d'un condensateur est utilisée dans la réception des signaux
électromagnétiques des postes radio, afin de sélectionner la fréquence d'une onde porteuse déterminée
(cf. chapitre 16). Le circuit se présente comme sur la figure 3.19a : la tension excitatrice est celle induite
par une antenne, laquelle est représentée par e{t) dans le circuit équivalent de la figure 3.19b.
Antenne
► "r
■O
<3L
iL
C
Radio
récepteur
Radio
récepteur
_
HP
a)
e(t)
b)
FIG. 3.19.
À la résonance, lorsqu'il y a égalité des fréquences ou syntonie, la tension aux bornes du condensateur, qui est connecté à l'entrée du radio-récepteur, a une amplitude sensiblement égale à Q fois la
tension induite par l'antenne. En modifiant l'un des paramètres du circuit oscillant, par exemple l'inductance, à l'aide d'un noyau de fer doux que l'on introduit dans l'enroulement cylindrique (cf. Électromagnétisme), ou la capacité, en faisant varier la surface de ses anuatures, on sélectionne la fréquence de la
porteuse choisie.
b) Circuit bouchon résonnant
Un simple diviseur de tension constitué d'un résister, de résistance Ri , et d'un ensemble RLC
placé en série, permet de réaliser le blocage de l'une des fréquences que contient le signal d'entrée
non sinusoïdal (Fig. 3.20). Pour l'une des composantes sinusoïdales e{t) du signal d'entrée, la tension
104
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
sinusoïdale de sortie us{t), aux bornes du circuit résonnant RLC, a pour expression :
uAt) =
eit)
-çW
Z + /?! -w
avec
Z = R + j (Lco — —— j
^ V
COJ)
En choisissant les valeurs L et C telles que la pulsation co\ soit pulsation propre du circuit, on obtient,
puisqu'alors LCù)\ = 1 :
^ = r-ÎR^
Ainsi, pour i?i = 990 O et /? = 10 H, la tension u^it) ne représente que 1% du signal d'entrée. En
revanche, les autres fréquences seront transmises, pratiquement sans altération, pourvu que le facteur de
qualité Q soit suffisamment élevé.
Ri
L
e{t)
R
hc
FIG. 3.20.
y, _ CIRCUIT RESONNANT PARALLELE
Le circuit résonnant parallèle RLC est formé d'un ensemble bobine-résistor (inductance L et
résistance totale R ), en parallèle avec un condensateur de capacité C. Le générateur impose à ses
bornes la tension d'excitation, comme le montre la figure 3.21a : le résistor auxiliaire, de résistance Ra ,
pennet de maîtriser l'intensité i du courant que débite le générateur.
l
n
&R-
L
M
Ra
C
R
a)
b
FIG. 3.21.
V. 1. — Équation différentielle du circuit
Désignons par q l'intensité du courant dans la branche comportant le condensateur et par i celle
où est connecté le générateur; l'intensité du courant qui traverse la bobine est donc i — q . Il vient, en
105
Oscillations électriques harmoniques, amorties, forcées. Résonance
appliquant la loi des mailles au circuit RLC (cf. chapitre 2) :
ÎL=R{i^U)+LiJ^fl
C
df
SO*
L^+Rh +
at
îi=Ri
C
+
Lf
dr
Comme q = dgj/d?, on trouve, en introduisant Te = L/R et ù)q = 1/(LC) :
q\ H
q\
Te
9
di
i
h û>o <?i — — -4
avec
dî
Te
./ %
.
/
. ,
i{t) = im cos(wr + (pi)
L'équation différentielle à laquelle satisfait la charge q\ du condensateur est donc de la même forme que
dans un circuit résonnant série ; seule l'excitation fait apparaître une somme de deux termes directement
reliés à i. La solution établie qui s'impose, du fait du terme d'amortissement, s'obtient alors en injectant
une solution de la forme :
(0 = qi,m exp./(W + (pq)
dans l'équation
§, + — +
^ = T7 + —
V. 2. — Impédance du circuit résonnant parallèle
Calculons l'impédance qu'offre le circuit résonnant parallèle RLC au générateur. Elle s'obtient
aisément selon :
Z = —1 - 2
Zj d Z2
avec
Z] = -7—
et
Z? = i? + jLo
d'où;
R -LjLù)
^
1
1 — LCù) + JRCùj
] +jQx
1 — a;2 + jxj Q
en fonction de R, x = (o/ojç) ti Q = Loy^/R = 1 /[RCcoif). On en déduit le carré du module de Z :
2
|Z|2 = R
1 + <22*2
(1 -a2)2-KY2/<22
Cherchons les maxima ou minima de [Z|2 , lorsque la fréquence réduite x varie. Il vient :
d|Z|2
=
....2K1 -X2)2 +x2/g2]62 - (1 + gV)(l/e2 - 2(1 — x2)
=
[(1-x2)2+x2/Ô2]2
dx
d'où, en effectuant :
Q2{1 - 2x2 + x4) + x2 ~ ^ - x2 H- 2 + 2ô2x2 - 2x2 - 2C2x4 = -Q2xA - 2x2 + 2 + g2 - ^2 = 0
On doit donc résoudre l'équation du deuxième degré suivante en x2 :
a4+
^"i"Iï+^-0
dont les solutions sont :
2
x =^±l^+1
J_
ë2 "ë4
ô2
±
V1
+
Comme x2 ^ 1 , ces dernières n'existent que si :
soit
e4+2e2-i^o
ô2
106
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
ce qui implique
Ô2 =£ ôi
,2 - ^2
Q'^Qi
ou
Q'I et £>2 étant les deux racines en Q2 de l'équation du deuxième degré précédente. La seule solution
acceptable étant
= ~1 + x/S, la condition pour laquelle l'impédance passe par un minimum ou un
maximum est :
Q2 ^\/2-~î
En général Q2
vient :
Q2 2> 0,64
soit
1 ; aussi développe-t-on (1 + l/Q2)" — 1 + nx
2
1
2
1
(\
V
2
Ô
1
+
n(n — \)x2/2 avec n — 1/2. Il
1
M -1
2g4/ —
2
<2
204
Comme le module |Z| de l'impédance varie entre
et 0, lorsque la fréquence passe progressivement
de 0 à oo, l'extrémum est un maximum, qui se produit pour :
M
- fi!
x— — ^
«o
v
1
r
2e4
Pour x œ 1, l'expression de l'impédance se réduit à :
l
jQ
iO
o
Z^R—^^R^- = Q2R
j/Q
J/Q
n
\Zmax\^Q1R
d'où
Sur la figure 3.21b, on a représenté la variation du module de l'impédance, en fonction de x, pour
0 = 20 :
1 + Q1x1
|Z| = R
Notons que, pour ^ = 1 et g2
11/2
1 -x2)2^xllQ2_
1 :
Z] — ——— — ——— — —-jlaiQ
jCù)
jCùJQ
et
Z?
=
R ri- jhco — R ri~ JLojq ~ JLojq
Les deux impédances Z\ et Zj sont donc en opposition de phase. Il en résulte que les intensités q et
*2 des courants dans les branches le sont aussi ; |Z| devient alors très grand.
Ordre de grandeur : pour /?=10n, C=1|jlF et L = 40 mH , on trouve :
Wo
= 5 000 rad ■ s"1
=
/o = 796 Hz
\ LC )
g = ^2 = 20
R
et
|Z(mr| = 4 kO
V. 3. — Circuit bouchon. Antirésonance
Lorsque l'excitation est constituée d'un générateur de tension, qui maintient à ses bornes une f.e.m
sinusoïdale, de la forme e{t) = emcos{û)t + fie), l'intensité /(/) du courant débité par le générateur,
que l'on mesure à l'aide de la tension aux bornes de Ra , passe par un minimum pour co « coq .
107
Oscillations électriques harmoniques, amorties, forcées. Résonance
Aussi un tel circuit est-il appelé circuit bouchon ou circuit antirésonnant. L'amplitude im de l'intensité
de ce courant minimal vaut alors :
- Q2R
+ Rii
Ordre de grandeur : pour em = 5Y, \Zmat\ = Q2R = 8 kfl et Ra = 100 H,
vaut 0, 62 mA.
V. 4. — Excitation par une source de courant
On peut exciter le circuit par une source de courant, laquelle fournit un courant d'intensité déterminée i{t) — im cos(wr + 4>i) . On réalise aisément une telle source de courant à l'aide d'un amplificateur
opérationnel (cf. chapitre 8). L'amplitude um de la tension aux bornes du condensateur du circuit parallèle, qui vaut Zim , passe alors par un maximum um>max , lorsque l'impédance offerte par le circuit est
maximale, c'est-à-dire pour
ruo .
Ordre de grandeur : pour im = 1,5 mA et \Zmax\ = 8 kfi , ununax = Zim = 12 V .
CONCLUSION
Énumérons les points essentiels.
1) Lors de la décharge d'un condensateur dans une bobine, l'intensité du courant, la tension aux bornes
du condensateur et sa charge oscillent avec une pulsation <wo qui ne dépend que des caractéristiques de
l'oscillateur, la capacité du condensateur et l'inductance de la bobine :
a,0 = (LC)-''2
fa =
et
r„ = l^LC)1/2
2) Le caractère partiellement ohmique des composants est à l'origine de l'amortissement de l'amplitude des oscillations, selon une décroissance exponentielle, et modifie la valeur de la pulsation : on peut
caractériser cet amortissement soit par la durée de relaxation en énergie re , soit par le décrément logarithmique A, soit par le facteur de qualité Q :
avec
co,
4^
et
O — coqt e —
3) L'équation linéaire :
q -\
\- co^q — 0
fe
caractérise la variation de la charge d'un condensateur dans un circuit électrique RLC série, en régime
quasi stationnaire ; elle détermine l'évolution temporelle de la tension uc{t) aux bornes du condensateur, puisque q = Clic ■ En raison de la linéarité, ces oscillateurs satisfont à des équations simples et
leur évolution est prévisible.
4) Lorsqu'une tension sinusoïdale est appliquée aux bornes du circuit RLC, la charge satisfait à l'équation d'évolution suivante :
Cj -j- — + COq Cl = ùm COS^COt
Te
(ffe)
L'excitation impose sa fréquence en raison de la dissipation par effet Joule dans les conducteurs ohmiques. Pour déterminer l'amplitude et la phase de l'oscillateur, il suffit de chercher une solution particulière de cette équation, sinusoïdale et de même pulsation que celle de l'excitation.
5) Lorsque la pulsation de l'excitateur est égale à celle de l'oscillateur, on constate que le module de
l'admittance est maximal, ou que le module de l'impédance complexe est minimal. C'est la résonance.
108
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
Pour une amplitude de l'excitation indépendante de la pulsation, on observe, à la résonance :
i) un maximum de l'amplitude de l'intensité du courant,
ii) une puissance moyenne transférée de l'excitateur vers le circuit qui, elle aussi, est maximale,
iii) une amplitude de la charge du condensateur proche de sa valeur maximale, laquelle n'existe
que pour des systèmes peu amortis ( <2 > 1 / v^) •
6) Avec un circuit résonnant parallèle, les résultats sont inversés.
Enfin, la résonance en électricité peut être un avantage, lorsqu'on veut augmenter la sensibilité d'un
circuit, comme lors de la réception de signaux hertziens ; le circuit se comporte alors comme un filtre
passe-bande (cf. chapitre 6).
EXERCICES ET PROBLÈMES
P3-1. Diagrammes de l'impédance et de l'admittance d'un circuit RLC
Un générateur maintient, aux bornes d'un circuit série RLC, une tension sinusoïdale, de pulsation
o). Ses caractéristiques sont les suivantes :R= 100 fi, L = 25 mH et C = 33 nF.
1. Déterminer la fréquence propre de ce circuit, la durée de relaxation en énergie Te, le facteur de
qualité et la fréquence des oscillations amorties.
2. a) Rappeler l'expression de l'impédance Z du circuit. Calculer le module de Z ainsi que son
argument ç pour une fréquence de 5 kHz.
b) Représenter géométriquement Z , dans le plan complexe. Quelle est la courbe décrite par l'extrémité I du vecteur OI, associé à l'impédance complexe Z, lorsque co varie de 0 à l'infini ?
3. a) Rappeler l'expression de l'admittance Y du circuit. Calculer son module, ainsi que son argument, pour une fréquence de 5 kHz.
b) Représenter géométriquement Y dans le plan complexe. Quelle est la courbe décrite par l'extrémité A du vecteur OA , associé à l'admittance complexe F, lorsque m varie de 0 à l'infini?
P3- 2. Modèles série et parallèle d'une bobine
On schématise une bobine d'induction par les deux modèles représentés sur la figure 3.22.
1. Donner les expressions de l'admittance de la bobine dans les deux modèles. En déduire, en
régime sinusoïdal, de pulsation w , la relation donnant /?' et L' en fonction de R, L et co .
2. Que deviennent ces expressions si Lù)jR
1 ? Sachant que R = 5 Ll, L = 25 mH, calculer
R' et L' pour les deux valeurs suivantes de la fréquence : / = 100 Hz et / = 10 kHz . Commenter.
L
R
R'
FIG. 3.22.
Oscillations électriques harmoniques, amorties, forcées. Résonance
109
P3- 3. Facteur de qualité d'une bobine en forme de solénoïde
Une bobine est constituée de 500 spires, en fil de cuivre enroulé autour d'un mandrin cylindrique,
de rayon r = 3 cm et de longueur / = 10 cm. Le champ magnétique qu'elle produit, en son intérieur,
est celui d'un solénoïde infini. On donne le diamètre du fil et on rappelle la conductivité du cuivre,
respectivement : D = 1 mm et y = 5,8 x 107 S • m-1 .
1. Calculer l'inductance L et la résistance R de la bobine.
2. La bobine forme avec un condensateur, de capacité C = 0, 5 jjlF , un circuit oscillant. Quel est
le facteur de qualité du circuit ?
P3- 4, Décharge d'un condensateur à travers une bobine
Sur la figure 3.23, le condensateur, de capacité C = 0,3 /xF, est d'abord chargé à travers un
résistor (résistance /? = 8 fî ) par une source de tension stationnaire. 11 se décharge ensuite dans une
bobine, d'inductance L = 50 mH et de résistance r = 5 ù.
1. L'interrupteur est en position 1
a) Établir l'équation différentielle à laquelle satisfait la tension u{t) aux bornes du condensateur.
En déduire la loi d'évolution u{t) et calculer la constante de temps r du circuit.
b) Représenter graphiquement uit) avec soin. Au bout de quelle durée la charge du condensateur
diffère-t-elle de sa charge limite de 0,01% ?
2. L'interrupteur est en position 2
a) La charge du condensateur étant considérée comme achevée, on bascule l'interrupteur dans la
position 2. Établir l'équation différentielle à laquelle satisfait la tension u{t). En déduire les caractéristiques de cet oscillateur, c'est-à-dire la fréquence propre /o et la durée de relaxation en énergie re.
b) Quel est le régime de la décharge du condensateur dans la bobine ? Exprimer u{t), sachant qu'en
début de décharge la tension vaut Uq . Calculer la valeur de la pseudo-fréquence f, du phénomène.
c) Au bout de quelle durée l'amplitude des oscillations est-elle divisée par 10 ? Comparer cette
durée à la pseudo-période Ta .
—[
L
r
FIG. 3.23.
P3- 5. Résonance d'intensité
Un condensateur (capacité C = 0,22 pJF) et une bobine (inductance L = 150 mH et résistance r = 15 fi) sont connectés en série aux bornes d'un générateur, de force électromotrice
e{t) = E\/2cos{ù)t) avec £ = 2 V et d'impédance interne négligeable.
110
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
1. Donner, en la justifiant, l'expression de l'intensité du courant, en régime sinusoïdal établi. En
déduire l'intensité efficace /, en fonction de E, L, r C et û) . Tracer l'allure du graphe /(&>) et déterminer la valeur maximale Imax de / lorsque la fréquence varie, ainsi que la fréquence correspondante.
2. Exprimer la tangente de l'angle du retard de la phase ç de i(î) par rapport à e[î), en fonction
de L, r, C et
. Calculer cp pour les valeurs suivantes de la pulsation :
Ù) = (ÛQ
I -
1 \
20/
et
CÛ2 — fc>0 ( 1 +
4
P3- 6. Q-mètre ''"5©
Le ^-mètre est un appareil qui pennet de mesurer le facteur de qualité Q d'une bobine, d'inductance L et de résistance R. Il est constitué d'un générateur sinusoïdal, dont la haute fréquence
/ est connue, d'un condensateur dont la capacité C est variable et d'un voltmètre d'impédance infinie connecté aux bornes du condensateur (Fig. 3.24). Les pertes du condensateur sont négligeables.
1. On place la bobine entre les bornes A et S, et on ajuste la capacité pour obtenir la valeur
maximale de la tension efficace U, aux bornes du condensateur, lue sur le voltmètre. On constate que
ce maximum varie beaucoup, lorsque l'on fait varier légèrement C. Calculer l'inductance, sachant que
/ = 20 MHz et C = 76 pF.
2. En modifiant la valeur de la capacité C de 2 pF, on constate que la tension U est réduite au
cinquième de sa valeur maximale ; en déduire la valeur de R ainsi que celle de Q .
q
<z>
<o
-/vlFIG. 3.24.
P3- 7. Condensateur de syntonisation
Dans un récepteur audio, la sélection de l'onde porteuse sinusoïdale (cf. chapitre 16) est réalisée
à l'aide d'un circuit résonnant série, dans lequel la capacité C du condensateur peut varier entre les
valeurs extrêmes suivantes : Cm = 25 pF et Cm = 400 pF. L'inductance de la bobine vaut L = 20 mH
et sa résistance est r = 20
.
L Calculer la bande spectrale sur laquelle le circuit peut être accordé.
2. Quelles sont les valeurs extrêmes du facteur de qualité du circuit ? Sachant que l'amplitude de la
tension induite par l'antenne dans le circuit est de 0,2 mV , trouver les valeurs extrêmes des tensions
aux bornes du condensateur, lorsque le circuit est accordé.
Oscillations électriques harmoniques, amorties, forcées. Résonance
P3- 8. Premier étage d'un récepteur audio
111
i web
Le premier étage d'un récepteur audio peut être schématisé par la figure 3.25. La f.e.m e[t) de
la source de tension variable est produite par l'antenne du récepteur qui reçoit les signaux hertziens.
La bobine a une inductance L = 3 mH , la résistance vaut i? = 50 fl et la capacité du condensateur
C = 330 pF.
1. Déterminer la fréquence fm pour laquelle le module du facteur d'amplification en tension Au{f)
du circuit, rapport de la tension aux bornes du condensateur sur la f.e.m, est maximal.
de
2. Dans quel intervalle spectral Au est-il supérieur à Aiumaxl V2, An^nax étant la valeur maximale
?
3. Aux bornes du condensateur, on mesure une tension efficace de 4,2 mV pour le signal sinusoïdal capté, de fréquence fm . Quelle est la valeur efficace de la tension de ce dernier ?
Antenne
♦ r
7777
FlG. 3.25.
P3- 9. Numérisation de signaux hertziens
wet)
-
Un système reçoit un signal d'entrée e{t) et fournit à sa sortie un signal .ç(/) satisfaisant à l'équation différentielle suivante :
s(î) +
+ colsf) = o)le(t)
Te
Un convertisseur analogique-numérique (CAN) effectue ensuite le codage suivant (cf. chapitre 19) : si
e{t) < E, avec £" = 2 V, pendant la durée T, le caractère 0 est transmis, alors que si e{t) > E,
pendant la même durée, c'est le caractère 1 qui l'est.
L Après une longue suite de caractères 0, apparaît le caractère 1. Sachant que le régime est
apériodique critique, quelle est la valeur de re, sachant que fo = (Oo/(27r) = 5 kHz ? Calculer l'écart
relatif [E — s{t)]/E au bout d'une durée de 150|jls.
2. Comment s'effectuerait le passage d'une longue suite de caractères 1 au caractère 0 ? Calculer
le rapport s{f)/E au bout d'une durée de 150 |xs.
P3-10. Mesure de l'inductance d'un circuit RLC parallèle
On se propose de mesurer l'inductance L d'une bobine, de résistance négligeable, en réalisant un circuit REC parallèle (Fig. 3.26) avec un condensateur de capacité C variable et un résister de résistance R = 1 kO. Le générateur impose aux bornes du circuit une tension sinusoïdale
e{t) = emcos{ù)t) , de fréquence / = 1,2 kHz et d'amplitude em = 5 V. On constate que l'intensité du courant débité par le générateur est la même pour les deux valeurs suivantes de la capacité :
Ci = 0,28 {jlF et Ci = 0,72 p,F.
112
3. Oscillations électriques harmoniques, amorties, forcées. Résonance
1. Calculer l'inductance de la bobine.
2. Quelles sont les intensités efficaces î\ et h ainsi que les phases associées aux intensités des
courants i\{f) et iif) correspondant aux deux valeurs de C ?
3. Pour quelle valeur Cm de C l'intensité du courant est-elle minimale ? En déduire la valeur de
cette dernière.
FIG. 3.26.
P3-11. Circuit bouchon dans un récepteur audio
L'inductance d'une bobine, dans un circuit résonnant parallèle accordé d'un récepteur audio, vaut
L = 45 pJH , alors que sa résistance est R = 250 fi . Le condensateur en parallèle avec la bobine a une
capacité C = 220 pF.
1. Pour quelle valeur f. en MHz de la fréquence de l'onde reçue, l'impédance du circuit est-elle
uniquement résistive ? Comparer cette valeur à la fréquence propre /o du circuit et à la fréquence fm
pour laquelle l'impédance est maximale.
2. Calculer l'impédance Z à cette fréquence fr. Comparer |Z| à \Zmax\ et à |Z(/o)|.
P3-12. Comportement électrique d'un quartz piézoélectrique -5?^
Du point de vue électrique, on peut représenter un cristal de quartz par un circuit électrique parallèle, dont l'une des deux branches contient un condensateur de capacité C\ = 0,5 pF et l'autre un
second condensateur, de capacité C2 = 10 pF en série avec une bobine non résistive de forte inductance L = 50 H (Fig. 3.27). Le système est excité par une tension sinusoïdale, de fréquence /, aux
bornes des deux branches.
1. En étudiant la variation du module de l'impédance qu'offre le circuit à l'excitation sinusoïdale,
montrer que le circuit se comporte comme un circuit résonnant pour une certaine fréquence f\ et comme
un circuit antirésonnant pour une seconde fréquence fi. Calculer f\ et fi.
2. On désigne par F et Z l'admittance et l'impédance du quartz. Calculer d |F|/d/ autour de
/ = 0 et de / =/2. De la même façon, calculer d |Z|/ d/ dans le voisinage de f =f\ . Commenter.
C,
Y
Fig. 3.27.
Régimes transitoires
La mise sous tension d'un circuit alimenté par des sources électriques stationnaires provoque l'apparition de courants et de tensions aux bornes des différents dipôles. Evidemment, l'établissement du
régime stationnaire n'est pas instantané, mais précédé d'un régime transitoire que nous nous proposons
d'analyser en appliquant les lois de base des régimes quasi stationnaires (cf. chapitre 2). De même, lorsqu'on alimente un circuit en régime sinusoïdal, un régime transitoire précède le régime établi. Nous
nous proposons dans ce chapitre d'analyser en détail ces régimes transitoires.
I. — ETUDE EXPERIMENTALE
1.1. — Réponse d'un circuit RC à une excitation sinusoïdale
Considérons un circuit constitué d'un résistor et d'un condensateur en série, alimenté par une
source de tension sinusoïdale, de force électromotrice ue{t) =
cos(fur) (Fig. 4.1). Initialement,
l'interrupteur iC est ouvert et le condensateur déchargé. En pratique, on utilise le bouton poussoir Ki,
qui permet de court-circuiter les armatures du condensateur, pour le décharger.
Ue
uc
Fig. 4.1.
La figure 4.2a montre l'évolution de la tension
aux bornes du condensateur, après la fermeture
de Ah . On observe que le régime sinusoïdal s'établit, après une certaine durée de transition T0f,.
iie>m
Expérimentalement, on constate que la durée du régime transitoire est indépendante de l'amplitude
et de la fréquence / = co/ilTr) de la source (Fig. 4.2b).
En revanche, elle dépend des valeurs /? et C des composants. Analysons les dimensions de ces
grandeurs afin d'en extraire une durée caractéristique r. Puisque u est une tension, Cu2 possède la
dimension d'une énergie (cf. Electromagnétisme) et ir jR celle d'une puissance, le rapport de ces deux
quantités est homogène à une durée :
Cu2
= RC = t
u2 jR
114
4. Régimes Transitoires
Dans le cas concret considéré, où R = 5 kD et C = 0,2 [xF, on obtient par le calcul r = 1 ms. Cette
durée est du même ordre de grandeur que la valeur
^ 3 ms observée expérimentalement pour le
régime transitoire, même si elle en est sensiblement différente.
MCO)
«c(r)T Régime transitoire
-H
Régime établi
ms
A/VWAAAAAA
«C(0
"c(t)
3 ms
■à)
b)
FIG. 4.2.
1.2, — Régime forcé et régime libre
Lorsqu'un système évolue en présence de sources extérieures d'énergie électrique, il est dit forcé
alors qu'en l'absence de ces sources, on le qualifie de libre.
Selon que les sources délivrent des tensions ou des courants respectivement stationnaires ou variables dans le temps, le régime forcé est stationnaire ou variable.
Ainsi, le circuit de la figure 4.1 fonctionne en régime sinusoïdal forcé dès la fermeture de l'interrupteur K\ .
En revanche, à l'ouverture de K\ , son régime est libre. Les phénomènes dissipatifs dus à l'effet
Joule provoquent une diminution de l'énergie du circuit. Il en résulte que, en l'absence de source interne
d'énergie, c'est-à-dire de composants actifs, tels qu'un transistor polarisé (cf. chapitre 7), un amplificateur opérationnel (cf. chapitre 8) ou un dipôle à résistance négative par exemple, les tensions et courants
s'amortissent au cours du temps.
1.3. — Régime établi et régime transitoire
a) Régime établi
En régime forcé stationnaire, le régime est qualifié d'établi si l'on n'observe aucune évolution des
grandeurs électriques.
En régime forcé variable et périodique, le régime est établi lorsque que l'évolution des grandeurs
électriques est devenue périodique. Ainsi, le circuit de la figure 4.1 atteint le régime établi au bout de la
durée r,,/,
3 ms .
Remarque : Le régime établi est parfois appelé régime permanent, expression ambiguë, notamment en
régime forcé variable, puisqu'elle suggère que les grandeurs n'évoluent pas au cours du
temps.
115
Régimes transitoires
b) Régime transitoire
Le régime transitoire est le régime qui précède le régime établi. Notons que le régime transitoire
correspond à l'effacement progressif des conditions initiales, c'est-à-dire à la disparition de l'influence
du passé du système sur son évolution.
Signalons que sa durée est déterminée par la précision recherchée. Sur l'exemple précédent, le
régime établi est atteint à environ 5% près au bout de 3 ms ; la précision est de 1% après une durée
d'environ 5 ms.
1.4. — Circuits linéaires dans l'ARQS
Considérons le cas fréquent où le circuit est constitué d'éléments linéaires. En outre, plaçons-nous
dans l'approximation des régimes quasi stationnaires, ce qui permet de négliger les phénomènes de
propagation (cf. Electromagnétisme) et donc d'admettre que l'intensité du courant électrique dans le
circuit est, à tout instant, identique en tout point d'une même branche du circuit (cf. chapitre 2).
a) Dipôles linéaires
Rappelons qu'un dipôle est linéaire si la tension à ses bornes et l'intensité du courant électrique qui
le traverse sont liés par une relation linéaire (cf. chapitre 1).
Exemples :
i) dipôle purement résistif, uab = R i
ii) dipôle purement capacitif, Uab = Qa/C
ou
* = C d Uab / d t
iii) dipôle purement inductif, uab = Lài/ dt
La courbe caractéristique d'un dipôle purement résistif est une droite qui passe par l'origine du
repère. Pour les dipôles purement capacitifs ou inductifs, la caractéristique dépend des variations temporelles de la source, c'est-à-dire du régime. Lorsque ce dernier est sinusoïdal, la caractéristique d'un
condensateur est une ellipse dont les axes coïncident avec ceux du repère, puisque :
ii{t) = umcos{cot)
et
i{t) = —Ciimco sm(cot) = iin cos (^cot +
avec
L, = Cu,,,co
donnent, en éliminant la variable t :
La fonction test composant d'un oscilloscope donne en effet une ellipse de demi-axes im et um , à la
fréquence de 50 Hz .
h) Équation d'un système linéaire
Dans un système linéaire, c'est-à-dire constitué de dipôles linéaires, l'application des lois de base
des circuits conduit à combiner, entre elles, des relations linéaires. Ainsi, l'évolution d'une grandeur
électrique de sortie s{t) prélevée dans le circuit, en régime forcé, sous l'action d'une source e(t), obéit
à une équation différentielle linéaire de la forme :
+ ... + aos(t) — bi -j-p- -t- bi-i
e{t)
où les coefficients
et bi sont indépendants de s{t) et e(t) . Les termes contenant la grandeur de
sortie à gauche et ceux contenant la grandeur d'entrée à droite sont bien séparés. Le membre de droite
est à l'origine du régime forcé.
4. Régimes Transitoires
116
La solution générale s{t) de cette équation différentielle linéaire, se présente sous la forme d'une
somme de deux fonctions :
s{t) = s,{r) + se{t)
si{t) étant la solution générale de l'équation homogène, c'est-à-dire sans second membre :
dk s
ak
d7
dk~] s
+ ak
~] dT37
+
+ a{iS
^
=
et se{t) une solution particulière de l'équation avec son second membre (cf. annexe 1).
Physiquement, la solution si[t), obtenue en l'absence de source extérieure, correspond au régime
libre. Si une partie de l'énergie est dissipée, ce qui est toujours le cas pour un circuit réel, le régime libre
tend vers zéro; la réponse se{t), caractéristique du régime établi, demeure alors la seule. Le régime
transitoire est donc la somme des deux réponses si(t) et se{t).
Remarque : En pratique, on obtient directement la solution particulière qui correspond au régime établi en recherchant une solution de forme sinusoïdale, de même pulsation que le signal
d'excitation en régime harmonique (cf. chapitre 3), et en recherchant une solution stationnaire si l'excitation est elle-même stationnaire.
c) Amortissement du régime libre
Pour un système linéaire, l'établissement du régime forcé suppose l'amortissement de la réponse
libre. Certains systèmes, instables, ont un régime libre qui se développe au lieu de s'amortir. Cela se
traduit par l'existence de solutions exponentiellement croissantes. Dans ce cas, une racine au moins du
polynôme, caractéristique de l'équation différentielle, est réelle positive, ou imaginaire à partie réelle
positive. Comme nous le verrons ultérieurement, certains critères fixent les conditions nécessaires et
suffisantes sur les coefficients de l'équation différentielle, qui pennettent de conclure sur la stabilité du
système (cf. chapitre 13).
II. _ ÉTABLISSEMENT D'UN RÉGIME STATIONNAIRE
II. 1. — Réponse indicielle
La réponse indicielle d'un circuit est la réponse qu'il donne lorsque la source électrique extérieure qui l'alimente passe d'une valeur nulle à une valeur finie stationnaire. Aussi les anglo-saxons la
désignent-ils par "unit step response". Le qualificatif indicielle vient probablement de Vindication que
donne cette réponse sur le comportement du système lorsqu'on le soumet soudain à une excitation.
Dans la suite, nous supposons cette source parfaite, c'est-à-dire capable de délivrer instantanément
le courant ou la tension demandée sans présenter de régime transitoire. La commande de l'établissement
du régime forcé stationnaire, ne nécessite que l'utilisation d'un interrupteur. On choisit fréquemment un
interrupteur électromécanique dont le rôle est de mettre en contact des lames conductrices. Les contacts
mécaniques peuvent entraîner de petits rebonds à la fermeture du circuit sur une durée pouvant atteindre
1 ms . Par ailleurs, ils introduisent des résistances supplémentaires dans le circuit, de l'ordre de quelques
milliohms, ainsi que des petites capacités ; dans la suite, nous négligerons ces imperfections.
Dans ces conditions, on peut représenter la source de tension commandée par un interrupteur à
l'aide de Và.fonction d'Heaviside ou échelon , du nom du physicien britannique O. Heaviside (Fig. 4.3).
Cette fonction est généralement notée Y(r) (lettre grecque upsilon majuscule) définie par ;
Y{t) - 0
si
/ < 0
Y(0 = 1
si
f> 0
117
Régimes transitoires
Si E désigne la f.e.m de la source, la tension qu'elle délivre se met sous la forme : ue{t) = EY{t). La
réponse du système à ce signal échelon est appelée réponse indicielle. Dans la suite nous préciserons ce
concept sur l'exemple simple et concret du circuit RC .
Y(t)
0
Ftg. 4.3.
Remarques : 1) La fonction d'Heaviside est discontinue en r = 0. Cette singularité n'a aucune réalité
physique, puisqu'un signal réel est toujours continu. La valeur de Y(0) n'a en fait aucune
influence sur l'évolution du système, en raison de sa durée nulle ; la valeur en zéro de la
fonction d'Heaviside est donc arbitraire. Notons que certains auteurs la fixent à 1 /2.
2) La fonction d'Heaviside est reliée à la fonction signe sgn{r), laquelle vaut 1 pour
f > 0 et —1 pour ? < 0 (cf. chapitre 15) ;
YW = \ [1 + sgn(r)]
3) En informatique, on choisit la valeur à l'origine sgn(O) = 0 pour des raisons pratiques
d'algorithmique. On a alors Y(0) = 1/2 .
Il. 2. — Circuit RC
s
a) Equations du circuit
Injectons, dans l'analyse du circuit de la figure 4.1 l'expression de la nouvelle source de tension :
RCd^
dt
+
uc = EYir)
ou
i
^ + u£ = EY(r)
dtrr
en faisant apparaître la constante de temps r = RC du circuit. Avec les valeurs standard R = i kfi et
C = 1 jxF, cette constante vaut r = 1 ms .
b) Régime libre
Le régime libre uCj permet de caractériser le système, car il est indépendant de la source. L'équation différentielle à laquelle il satisfait s'en déduit simplement en annulant le second membre :
d Uç i
Uç/
„
——^ H
=0
dt
r
, .
de solution
, ,
/ t\
uc lyt) = Cte x exp —
'
\ r/
puisque, cherchant une solution de la forme ucj{t) = exp(rt), on trouve l'équation caractéristique
r + 1 /r = 0, soit r = — 1/r (cf. annexe 1).
c) Régime établi
On obtient le régime établi en recherchant une solution particulière stationnaire de l'équation différentielle d'évolution avec la source externe, après fermeture du circuit :
dUce
' H
d/
u
Ce
E
— = —
r
r
. .
.
...
de solution immédiate
. ,
lie e\t) — Cte = E
4. Régimes transitoires
118
d) Régime transitoire
Le régime transitoire est la superposition de la réponse libre et de la réponse établie. Par conséquent :
«c(0 = "c./W + «C,e{0 = Cte x exp
+
E
L'existence du courant électrique provoque l'accumulation des charges sur les armatures du condensateur. La charge totale du condensateur varie donc sans subir de discontinuité :
q{t) -q{0) = q(t) = f i{t')dt'
Jo
Il en résulte que la tension uc{t) = q{t)/C est, elle aussi, continue. Comme, initialement uc{0) = 0 ,
alors :
uc{0) = Cte + £" = 0 d'où Cte - —E
Ainsi, la réponse indicielle du circuit RC a pour expression :
uc(t) = E 1 - exp
L'exponentielle décroissante, qui apparaît dans cette expression, ne devient négligeable au bout d'une
durée égale à plusieurs fois la constante de temps r , ce qui est bien conforme à ce que l'on observe expérimentalement. Pour t = 3t , l'exponentielle est inférieure à 5% de sa valeur initiale : si la précision
recherchée est de 1%, alors il faut r > 5t .
Précisons que la tangente à la courbe en r = 0, coupe l'asymptote en t = r. Les autres grandeurs
électriques du circuit se déduisent de uc selon :
i(t) -
^
ex
P (~~)
et
W/?
W
=;
R*
= Eex
P (~~)
Sur la figure 4.4, on a récapitulé ces résultats. Remarquons que la tension aux bornes du condensateur
est continue (Fig. 4.4a), alors que l'intensité /(/) = iiR(t)/R du courant est discontinue (Fig. 4.4b).
it
uR(t)
l/
// /
j/
/'
/■
/!
0
t
i
W-
a)
b)
Fig. 4.4.
e) Bilan d'énergie
Calculons le travail électrique total We:S fourni par la source au circuit, au cours du seul régime
transitoire puisque la source ne débite pas en régime établi. Il vient :
/oo
poo
EY{t)idt = E
=
-oo
rCE
idt = E
JQ
dq = CE
Jù
Régimes transitoires
119
Ce travail est en partie dissipé dans le résister par effet Joule :
f00
W' = l
f00
o ,
-Rldt
=
E1
f
2t\
E2t
A
l
CE2
= -—
Une autre partie de ce travail fourni par la source, est stockée sous forme d'énergie électromagnétique
dans le condensateur. Elle a pour expression (cf. Électromagnétisme) :
Se = ^C4(oo) - ^C4(0) =
Le bilan énergétique s'écrit donc :
+ Wj
avec
Ee =-Wj
Ainsi, par effet Joule, le circuit dissipe la moitié de l'énergie fournie par la source, quelle que soit la
valeur de la résistance. Le condensateur, lui, emmagasine l'autre moitié, sous forme électrostatique,
qu'il est susceptible de restituer.
Exemple : pour un condensateur, de capacité C = 2 pp, soumis à une tension de 10 V , l'énergie
emmagasinée par le condensateur, qui est aussi celle dissipée par effet Joule, vaut 0,1 mj .
f) Décharge libre du circuit
Lorsqu'on ouvre l'interrupteur Ki, l'état électrique du circuit n'est pas modifié. L'intensité i du
courant et la tension uR aux bornes du résister restent nulles. Le condensateur chargé impose, à ses
bornes, la tension uc — E ■ Si la source de tension est remplacée par un fil de connexion et si K\ ferme
à nouveau le circuit, le système évolue en régime libre en satisfaisant à l'équation différentielle :
d Ur
Ur
—r— H—- = 0
dt
r
Seule change la condition initiale mc(0) = E. En adoptant comme nouvelle origine des temps l'instant
de fermeture du circuit, on obtient l'évolution suivante des grandeurs électriques (Fig. 4.5) :
uc(t) = Eexp
=
c
=
ex
P (_~)
uc{t) ■
ur{î) '
E V.
\\\\
\\\
\\
\\
\\
\\
\\
\
= Ri =
L
r
0
/
/
R//
-Et'
1
a)
b)
Fig. 4.5.
-^exP (_~)
4. Régimes Transitoires
120
Le travail dissipé par effet Joule dans le résister, lors de la décharge libre du circuit, a pour expression :
W/,= /
—Ri2 d t =
E
R
(
exp
-*
(
î
\\
E2t
A t = ——
d
- =
R 2
CE1
=
Ainsi, lors de la décharge libre du circuit, l'énergie emmagasinée dans le condensateur est entièrement
dissipée par effet Joule. Lorsque la décharge libre est pratiquement achevée, mc{oo) = 0 ; le condensateur ne stocke plus d'énergie.
g) Continuité de la tension aux bornes d'un condensateur
Nous avons vu que, lors d'une charge ou d'une décharge, la tension aux bornes d'un condensateur
évoluait continûment (Fig. 4.4a et 4.5a). Ce résultat très général doit être attribué à l'énergie électromagnétique d'un système physique macroscopique qui ne peut subir de discontinuité (cf. Électromagnétisme). Ainsi, comme l'énergie électrostatique d'un condensateur, Cu2cl2, la tension uc à ses bornes
évolue sans discontinuité.
h) Perte de mémoire du circuit
Le condensateur étant initialement chargé sous différentes tensions, il est intéressant de noter la
rapidité de la progression exponentielle vers la tension E d'alimentation. Au bout d'une durée égale à
quelques r seulement, la tension uc aux bornes du condensateur devient pratiquement E. Il est alors
impossible de retrouver l'état électrique du circuit avant la fermeture de l'interrupteur; on dit que le
système perd rapidement la mémoire de son état initial.
Autant pour la réponse indicielle que pour le régime libre, on constate que la tension E n'apparaît
pas dans la durée du régime transitoire ( ?« 3t ). En effet, cette dernière est indépendante de la différence
de tension entre l'état final et l'état initial. Ceci est dû à la nature exponentielle de l'évolution : quelle que
soit la tension à atteindre, la durée de charge est une grandeur intrinsèque du circuit. Notons la différence
avec les évolutions proportionnelles au temps que nous rencontrons souvent dans la vie courante.
Remarque : La disparition exponentielle du régime transitoire est une caractéristique des systèmes
linéaires (cf. annexe 1 ).
II.3. —Circuit RL
Analysons le circuit représenté sur la figure 4.6, constitué d'un résistor (résistance /? ) et d'une
bobine idéale (inductance L ) en série.
K
Ur
R
E
L
Fig. 4.6.
UL
121
Régimes transitoires
a) Equations du circuit
Écrivons la loi des mailles, sachant que l'interrupteur K est fermé à l'instant pris comme origine :
Ri + L— = EY(t)
dt
soit
— + - = - Y{r)
ât
7
L
en faisant apparaître la constante de temps du circuit t = L/R.
Exemple : Avec /?=100n etL = 03lH3on obtient r = 1 ms .
b) Régime libre
Le régime libre // est caractérisé par l'équation différentielle homogène :
^ + - = 0
àt
t
de solution
ii{t) = Cte x exp f——1
\ tJ
comme pour le circuit RC.
c) Régime établi
Le régime établi est donné par la solution particulière, stationnaire, de l'équation complète, laquelle
admet comme solution évidente :
d) Régime transitoire
On obtient le régime transitoire en superposant la réponse libre et la réponse établie :
i{t) = ii + ie = Cte x exp
/
t\
E
j + ^
L'auto-induction dans la bobine s'oppose à toute variation brutale de l'intensité du courant ; ce dernier
évolue donc sans subir de discontinuité :
i{t) - i{0) = i(t) = 1
JQ
udt')
L
df/
Initialement, /(0) = 0. La constante est donc déterminée selon :
E
0 = Cte H—
R
soit
E
Cte =
R
d'où l'expression suivante de l'intensité dans le circuit RL :
,(r) =
f f1 "
eX
P (~t).
ainsi que celle des autres grandeurs électriques :
uR(t} = Ri = E 1 — exp
et
=
=
Sur la figure 4.7, on a rassemblé les résultats obtenus pour i{t) et Ui{t).
L'exp
122
4. Régimes transitoires
uiit)
KO
EJ-
E R
a)
b)
FlG. 4.7.
e) Bilan d'énergie
Contrairement au circuit RC, la source de tension dans le circuit RL fournit constamment de
l'énergie.
En régime établi, la source débite le courant d'intensité I = E/R sous la tension
puissance électrique Ve^ délivrée par la source et la puissance Vj dissipée par effet Joule :
d'où la
Vj = -RI2 = -El
= EI
On voit qu'en régime établi la somme des ces puissances est nulle.
En régime transitoire, Ve,s ti Vj ont pour expressions respectives :
—
R
I
exp
et
Vj = -
R
1
exp
Calculons la somme des travaux correspondants :
■pi
R
fOO
I
p-2
[Pe,s + VJ]dt=R
exp
1 — exp [ —
dr —
TE2
~ÏR = 2L
= 2L'
Ce travail est précisément la variation d'énergie magnétique de la bobine entre l'instant initial où i = 0
et l'instant final où i = E/R .Le bilan d'énergie du circuit s'écrit donc :
= W.
VF/
Ainsi, en régime établi, toute l'énergie fournie par la source est dissipée par effet Joule dans le résister; en revanche, durant le régime transitoire, la bobine emmagasine, sous forme d'énergie magnétique, une partie de l'énergie électrique fournie par la source.
f) Ouverture du circuit
À l'ouverture du circuit, le courant dans la bobine diminue et provoque l'apparition d'une force
électromotrice qui s'oppose à l'extinction brutale du courant. Une étincelle de rupture peut se former au
niveau de l'interrupteur. Si le courant est important, il est nécessaire de lui permettre de s'écouler dans
une autre branche du circuit. On peut alors utiliser une diode, montée en parallèle sur le circuit RL (Fig.
4.8). Dans ce cas, à la fermeture du circuit, le courant évolue en régime libre. Si l'on suppose la diode
idéale, le circuit obéit à l'équation différentielle :
Régimes transitoires
123
Initialement ?(0) = E/R = /.
UR
K
R
e
î(B
L
S
UL
FIG. 4.8.
En adoptant comme nouvelle origine des temps l'instant d'ouverture du circuit, les grandeurs électriques évoluent selon (Fig. 4.9) :
iif) = /exp ^^
ui{t) = L— = —Eexp ^^
"/?(?) = Ri = Eexp ^^
On en déduit le travail dissipé par effet Joule dans le résister, lors du passage du courant :
W'j = f -Rfdt = f -RI2 exp ("Y')
df
= -■R/24
=
"ii/2
=
~£m
Ainsi, l'énergie emmagasinée dans la bobine est entièrement dissipée par effet Joule lors du passage du
courant dans le circuit.
i(t)%
ulU)
E R
b)
0
Fig. 4.9.
g) Continuité du courant dans une bobine
Lorsqu'on met sous ou hors tension une bobine, le courant qui la parcourt évolue continûment (Fig.
4.7 a et 4.9 a). Ici aussi, on attribue ce résultat très général à l'énergie totale d'un système physique qui
ne peut subir de discontinuité. Il en résulte que, comme l'énergie magnétique Li2(2 emmagasinée dans
la bobine, l'intensité du courant i qui la traverse évolue sans discontinuité.
II. 4. — Circuit RLC série
Sur la figure 4.10, on a représenté le circuit RLC constitué d'un résister, d'une bobine et d'un
condensateur en série (cf. chapitre 3).
a) Équations du circuit
On ferme l'interrupteur K à l'instant origine. Ecrivons la loi des mailles pour ce circuit en série
en veillant à l'orientation du courant afin que les charges s'accumulent sur l'armature de charge q du
124
4. Régimes Transitoires
cz>
o
o
o
«c
FlG. 4.10.
condensateur. Il vient :
Ri + L^- + uc = EY{t)
Cl T
avec
uc = ^
et
i
=<
~rL
Qt
Cette équation linéaire du deuxième ordre se met sous la forme canonique suivante :
ïïc-\- — ùc +
Tp
u
c = (*>lEY(î)
COf
en posant
et
LC
t* = —
b) Régime libre
Le régime libre iicj est solution de l'équation différentielle homogène :
d2Mc,/ , 1
d t1
t„
d/
,
+
2u
n
c,i — 0
La solution dépend des racines de l'équation caractéristique que l'on obtient en cherchant des solutions
en exp(rr) :
r2 4- — + (4 = 0
Te
dont le discriminant a pour expression :
1
A
= 4-
4
^H4±!-lUW0
'O ' e
/
-1
\4<22
OÙ
Q — 0))T t
est facteur de qualité du circuit (cf. chapitre 3). On est conduit à envisager trois cas suivant la valeur
du discriminant (cf. annexe 1).
1) C>l/2 (A<0): régime libre pseudo-périodique
L'équation caractéristique admet deux racines complexes conjuguées :
1
.
r, =-^ - -t-V]o)
iù)„a
2r,
et
1
.
r2 =
— -—-j(o
io)..a
2ts
1
avec
/»,.
o)a —
= /wn
(o0 I[ lI -
1/2
r I
4Q*
La solution de l'équation différentielle homogène peut se mettre sous les formes suivantes :
uc,i(t) = Z)exp
cos(û>«r + 4>(l)
ou
Mc,/(0 = exp
[Di cos(war) + D2 sin(^?)]
en désignant par D, (f)a,D\ et D2 les constantes d'intégration. L'évolution est dite
car l'amplitude des oscillations n'est pas constante au cours du temps mais décroît proportionnellement
au facteur exp(—^/2Te). Sur la figure 4.1 la, on a représenté le cas correspondant à la condition initiale
«c,/(0) = uq et i(0) = 0, c'est-à-dire [d«cy/ d /] (0) = 0 .
Régimes transitoires
125
Uc{t)'
Uc{t)' ;
Q > 1/2
uc{0)
uc{0)
Y\e< 1/2
\
0
//
/y
I/2
\
t
0
a)
b)
FlG. 4.11.
2) Q < 1/2 (A>0): régime libre sous-critique ou apériodique
Les racines r\ et ig sont réelles et négatives :
1
n = -—+p
et
1
•■, = -—-P
avec
0=
/
1
^l/2
La solution de l'équation différentielle homogène se met alors sous la forme (cf. annexe 1) :
«c,/(0 =
exp(ri/:) + Dt exp(r2/)
ou
Mc,/(0 —
ex
P
2—)
cos
h(/S0 + D'2 sinh{/Sr)]
En pratique, on obtient ce régime en augmentant la valeur de R pour des caractéristiques données de la
bobine et du condensateur.
3) Q = 1/2 ( A = 0 ) : régime libre critique
L'équation caractéristique admet une racine double cq = —coq .La solution de F équation différentielle
homogène se met sous la forme (cf. annexe 1) :
«c,/ = {Dit+ D2) exp(—fuo?)
Le régime critique impose une relation précise entre R, L et C. Puisque Q
=
1/2, alors
^0 = l/{2Te) = R/IL.
Les régimes critique et sous-critique sont apériodiques, comme le montre la figure 4.11b, dans les
mêmes conditions initiales que 4.1 la.
En électronique, on introduit souvent, au lieu du facteur de qualité Q, le facteur m appelé paramètre critique ou facteur d'amortissement, relié à Q par l'équation :
1
1
"î = :r~r =
2Q
2ù)oTe
Notons que la valeur singulière (2=1/2 correspond alors à m = 1 .
Exemple : pour un circuit RLC avec C = 2p.F, L = 0,5H eti? = 50fi,on trouve Te = 10 ms,
û>o = 1 000 rad.s-1 soit /o ^ 160 Hz , Q = 10 ou m — 0,05 . Le régime libre est pseudo-périodique.
On obtiendrait le régime critique avec R = Rc = 1 kfl.
4. Régimes Transitoires
126
c) Régime établi
Le système étant linéaire, lorsque l'interrupteur est ferané, le régime établi est la solution particulière stadonnaire de l'équation avec son second membre ;
d llr e
1 d Ur e
0
o „
' + OJ0 lie,6 = Ol>qE
Te d /
df
.
SOlt
_
„
Uc.e = Cte = E
d) Régime transitoire
Le régime transitoire est la superposition de la réponse libre et de la réponse établie :
uc{t) = UcA1) + wc,eW = E>]_ exp(r]r) + D2exp(r2r) + E
Initialement, le courant dans le circuit est nul et le condensateur déchargé. A la fermeture de l'interrupteur, le courant dans la bobine et donc dans le circuit ne subit pas de discontinuité. Il en est de même
pour la tension aux bornes du condensateur. Les conditions initiales sont alors :
duç
wc{0) = 0
et
/(O) = 0
soit
dr
(0)=0
En explicitant ces conditions initiales, on trouve :
0 = Di + Dt + .E
et
0 = r|Di+/*2D2
d'où les expressions suivantes de Dj et D2 :
f2
D\ = -E-
et
r
2 - ri
f'i
Dj = Eri - ri
La nature du régime transitoire dépend de re et donc de Q . Sur la figure 4.12. on a représenté la tension
uc{t) et l'intensité i{t) du courant au cours du temps pour différentes valeurs de Q.
1) Régime transitoire pseudo-périodique
Pour Q> 1 /2, on a :
''1
:
1
2r.
joia
et
ro
et
D5 =
J^a
2r,
d'où:
E (
2ù)aTe
"D
O
C
3
O
(M
O
(M
fe
Il en résulte :
uc = E < \ — exp
uclr)
's_
>CL
O
(J
-2
1
1+
2r,
cos{cûat)
K*)
Ô> 1/2
sm{(oat)
2Te(i)(l
Q> 1/2
,0=1/2
/
/A
Q<1 2
r\Q < 1/2
0=1/2
a)
FIG. 4,12.
b)
127
Régimes transitoires
2) Regnne transitoire sous-critique ou apériodique
Pour Q < 1 /2, il vient :
-I- b
et
ro = —
p
avec
B = coq
d'où:
Di =
1
et
Dt =
-Ç
2 V
2Br
Par conséquent :
uc = E <1 — exp
—
cosh{/3t) +
sinh(/3r)
3) Régime transitoire critique
Pour Q = 112, ri = ri = tq = —\ /(2r^) = —coq . Comme dans ce cas singulier :
uc = iD\î + Dj) expf-woO + E
les conditions initiales donnent :
0 = Do + £"
et
0 = — omDo + D
les expressions de D) et Dj sont les suivantes :
D\ = —coqE
et
Di = —E
On en déduit :
lie = E[l — (loqî 4- 1) exp (—wqC]
e) Bilan d'énergie
Effectuons un bilan d'énergie en faisant apparaître les puissances instantanées consommées dans
chaque dipôle. On peut obtenir directement ce bilan d'énergie en multipliant l'équation différentielle
issue de la loi des mailles, par l'intensité i du courant :
« .9
Ri
di.
E——i -p lie i — Ei
at
En tenant compte des relations uc = q/C et i = dq/dt, l'équation se met sous la forme explicite
suivante :
dr \2 C
2
J
Cette forme fait apparaître la puissance instantanée fournie par la source Ve,s = Ei, la puissance instantanée dissipée par effet Joule dans le résistor Vj = —Ri2, ainsi que les énergies électrique £e = q112C
et magnétique Sm = Zi2/2, stockées respectivement dans le condensateur et dans la bobine. On a alors :
— (£e -P £m) — Ve^ + Vj
soit
A {Ee + £,„) —
+ Wj
en intégrant. Lorsque le régime stationnaire est établi, le courant dans le circuit est nul. La source
électrique ne fournit alors plus d'énergie. L'énergie magnétique de la bobine est nulle et le condensateur,
chargé, emmagasine l'énergie électrostatique £e = CE212.
4. Régimes Transitoires
128
Évaluons le travail total fourni par la source :
Wes=
f00
Eidt = EC
Jo
f00 dur
f
o
—±dt = EC
duc = CE2
Jo
d/
Jq
On en déduit le travail total dissipé dans le résister :
Wj = £e-
=
CE2
- CE1 =
CE2
Ainsi, la moitié de l'énergie apportée par la source est dissipée dans le conducteur ohmique, le reste est
stocké dans le condensateur.
L'énergie électromagnétique du circuit évolue au cours du temps selon :
£em = Se + £m = -Cu2c + -Lr
avec
,duc
i= C
dt
En régime pseudo-périodique, l'énergie du circuit oscille entre la forme électrique et la forme magnétique. Les phénomènes dissipatifs amortissent cet échange au bénéfice de l'énergie électrostatique du
condensateur, au fur et à mesure que le courant s'atténue dans le circuit. Lorsque le courant commence
à circuler, le condensateur et la bobine emmagasinent de l'énergie ; quand l'intensité du courant diminue, l'énergie du condensateur continue d'augmenter, tandis que l'énergie magnétique de la bobine, elle,
décroît.
Dès que le courant s'inverse, l'énergie magnétique de la bobine augmente à nouveau. Le condensateur se décharge, mais pas totalement, car la dissipation d'énergie dans le résister amortit le courant
retour (Fig. 4.13).
£em{t)
em
- CE
f
\y ,
Fig. 4.13.
II. 5. — Circuits linéaires quelconques
a) Méthode d'analyse
Pour un circuit linéaire quelconque, la recherche du régime transitoire s'effectue en plusieurs
étapes :
i) établissement des équations du circuit, à l'aide des lois de Kirchhoff,
ii) recherche des conditions initiales en précisant les grandeurs électriques de chaque dipôle, immédiatement après la fermeture du circuit,
iii) résolution des équations,
iv) vérification des solutions obtenues par comparaison avec l'état du circuit pour t infini.
Régimes transitoires
129
b) Exemple
Dans le circuit de la figure 4.14, aucun courant ne parcourt le circuit avant la fermeture de l'interrupteur, et le condensateur est initialement déchargé. Intéressons-nous à l'évolution de la tension ««(r),
lorsqu'on ferme l'interrupteur.
*
'C
T
1
UL
FlO. 4.14.
La loi des mailles donne ;
ur + ^ — EY{r)
C
et
ur = L—— + rii
at
Avec la loi des nœuds :
.
le =
, .
+ iR
•
•
qui s écrit aussi
•
dq
iL =
dt
Ur
—
R
on obtient :
^ R
q = CEY{t) — Cu
et.
Ldu
r
,d2^
R , r---„
„R = L—-+
R
d'où, en dérivant la première équation pour / > 0 et en la combinant avec la seconde :
dq
diiR
—— = —C——
dî
dt
et
d2 ur
Ur = —LC ——r2
dr
LduR
R dt
„duR
rC —
dt
r
—UR
R
Finalement, on obtient, en ordonnant les différents termes :
d2 ur
2
dr
f
r\
r-\-R Ur _
\RC
Ljdt
R
LC~
Recherchons les conditions initiales M/?(0) et [dM«/d?](0). Immédiatement après la fermeture du circuit par l'interrupteur K, la tension aux bornes du condensateur reste nulle et aucun courant ne circule
dans la bobine :
Mc(0) = 0
et
iL{0) = 0
On a alors :
uR{0) =-uc{0) + E = E
et
,R(0) = /c(0) = C^(0) = C^7^(0) = -C^(0)=0
Il en résulte :
"/?{0) = E
et
=
^
Compte tenu des conditions initiales, l'équation différentielle étant homogène et du deuxième ordre, en
régime pseudo-périodique, la solution se met sous la forme (cf. annexe 1) :
uR(t) = Eexp j) cos(^r) + —J— sm{û)at)
\ ^e) [
éTeCOa
4. Régimes Transitoires
130
avec ;
rV1
/ 1
Te ~
+
Zj
1 [ A{r + R)
et
(i)a
~l
RLC
^\211/2
( 1
V.Zc
+
Zj
La solution précédente conduit à ur(oq) = 0. On vérifie aisément que ce résultat est physiquement
acceptable. En effet, en régime stationnaire, le condensateur se comporte comme un coupe-circuit ; on
obtient alors un circuit RL qui s'amortit en régime libre, ce qui implique :
Z/?(oo) = 0 =
11
SOit
Ur{oo) = 0
II. 6. — Identification des systèmes linéaires
a) Contenu de la réponse indicielle
À première vue, la réponse indicielle renseigne sur la nature pseudo périodique ou apériodique du
régime d'évolution libre. Comme nous le verrons ultérieurement (cf. chapitre 15), son contenu est plus
riche encore, puisqu'il permet de reconstituer l'ensemble du comportement fréquentiel du système.
Pour identifier un système linéaire, on peut chercher à déterminer les n-\-\ coefficients de l'équation différentielle d'ordre n . Lorsque n = \ ou /? = 2, il est possible de détenniner graphiquement
les constantes de temps du système et de remonter ainsi aux coefficients de l'équation différentielle.
Les ordres plus élevés, mettent en oeuvre des méthodes plus complexes ayant recours aux transformations de Fourier (cf. annexe 2) ou de Laplace (cf. annexe 3), mais aussi à la modélisation.
b) Durée de réponse
La durée de réponse à x% est la durée tx% nécessaire à un signal pour atteindre (100 — v) % de
sa valeur finale d'équilibre à x% près.
s{OO)-s{Tx%)
=
s (oo) — s (0)
Exemple : la durée de réponse à 5% d'un circuit RC, excité par une tension échelon, est la durée
nécessaire pour que la tension aux bornes du condensateur initialement déchargé, atteigne 95% de la
tension finale, c'est-à-dire 75%
3r = 3RC .
c) Durée du régime transitoire
On appelle durée du régime transitoire à x% , r!r, la durée de réponse à x% de la réponse indicielle. C'est la durée au bout de laquelle la réponse libre du système est négligeable. Sans autre précision, nous désignerons ainsi la durée du régime transitoire à 5% .
d) Durée de montée
La durée de montée rm est la durée nécessaire à un signal pour passer de 10% à 90% de sa
valeur finale d'équilibre. On la relie simplement aux durées de réponse :
T
m — T10%
— t
90%
De nombreux oscilloscopes analogiques présentent, sur leur cadran d'affichage, une échelle verticale
marquée de repères gradués 0%, 10%, 90% et 100% . Ces repères permettent de mesurer la durée de
montée. Pour cela, on décalibre la sensibilité verticale de manière à remplir l'échelle 0 — 100% . Avec les
repères horizontaux 10% et 90% on mesure Tm comme indiqué sur la figure 4.15. Les oscilloscopes
numériques disposent généralement d'une fonction de mesure de la durée de montée d'un signal.
131
Régimes transitoires
100
90
0
FlG. 4.15.
e) Systèmes du premier ordre
L'équation générale d'un système du premier ordre qui donne la réponse s{t) à une excitation
e(t), est la suivante :
T
^7
+
=Aoe
W
r est la «constante de temps» ou durée caractéristique du circuit et Aq le facteur d'amplification
On comprend pourquoi : pour s et e stationnaires, Aq est le rapport s/e.
Notons que les circuits RC et RL précédemment étudiés sont des circuits du premier ordre.
D'après ce qui précède, sachant que .v(0) = 0, la réponse .v(/) à un échelon e[î) = emY{t) est
donnée par :
s(î)=A0em l-exp^--^
La mesure de 5(00) permet d'accéder au facteur d'amplification stationnaire :
A0 = ^
Quant à la constante de temps r, elle est reliée à la durée de montée selon :
^15?9=0,9=I-exp(-^)
5 (oo)
\
r /
On a donc Tio% = —t In 0,1,
et
s (oo)
=
q, 1 = 1 -exp
V
r
/
= —r In 0, 9 et finalement :
Tm — T 10% - t90% = t In 9 ^ 2,2 t
En pratique, il est préférable de mesurer la durée de montée à l'aide d'un oscilloscope et d'en déduire la
constante de temps, en divisant par 2,2. La méthode qui consiste à tracer la tangente à l'origine de la
courbe et d'en déduire r par intersection avec l'asymptote horizontale est déconseillée, car peu précise.
Elle conduit généralement à une surévaluation de r .
Enfin, remarquons que la constante de temps r s'identifie à la durée de réponse à 27% « 1/e, le
signal atteignant 63% de sa valeur finale.
132
4. Régimes Transitoires
Exemple : si la durée de montée d'un circuit RL est de 2,4 ms, la constante de temps correspondante est r « 2.4/2.2 « 1,1 ms. La durée du régime transitoire (Fig. 4.16) est donnée par :
t
5%
=
In 0,05 = r In 20 « 3 r
C'est précisément ce que nous avons observé lors de l'étude expérimentale du circuit de la figure 4.1 :
T0h = 3 ms et r = 1 ms . Évidemment, si une précision de 1% est recherchée, la durée du régime
transitoire devient :
ri% — r In 100 « 4,6 r « 5 r
s{î)/s{oo)
0,90
0,63 -
3r
2,2r
Fig. 4.16.
f) Systèmes du deuxième ordre
L'équation générale d'un système du deuxième ordre, qui fait correspondre la réponse 5(4) à l'excitation d'entrée e[i), est la suivante :
ld5
7 / \
2
/ \
—7 + -— + W5i(r) = (OoAoeit)
Cl tTe d t
■a
o
c
û
fM
1—1
O
(N
©
Aq étant le facteur d'amplification sîaîionnaire. Si la grandeur Te , homogène à une durée, est positive,
l'amortissement du régime libre est assuré : le système est stable.
La réponse s{t) à l'échelon e{t) = emY{t) dépend de re et donc de Q .
1) Si g > 1/2 (réponse indicielle en régime pseudo-périodique), s{t) s'écrit, sachant que
5(0) = 0 et 5(0) = 0 :
s{t) = Aq em \ 1 - exp ( -
ai
a.
o
u
cos(ct)n/') +
2r.
avec :
sin(<ua?)
2cf>(1T(j
1/2
^ — ^>0 ( 1 —
4Ô2
et
Q = CÛQTe
L'oscilloscope permet de mesurer la pseudo-période Ta . Il est souvent commode d'introduire le décrément logarithmique A , défini expérimentalement comme suit :
A = - In
n
s(t) — 5(00)
5(t + nTa) — 5(00)
^
1
eXP
In [
\ =
n
\ exp [-(r + nTa)/(2re)] J
2re
Régimes transitoires
133
Les notations sont celles de la figure 4.17. On en déduit :
ùj„ —
27r
77
et
tpe —
s{t)
Tn
2A
Q > 1/2
/¥\
Ai',
s(oo)
h
0
t)
52
/t\A
FIG. 4.17.
2) Si Q <1/2 (réponse indicielle en régime sous-critique), alors :
s(t) = Aq ein ^ 1 - exp
-
2r,
cosh(/3r)
sinh(^r)
2Tefi
3) si <2 = 1 /2 (réponse indicielle en régime critique), on trouve :
s(t) = Aq em [1 - {wot + 1) exp {-(OQt)]
En régime critique, la concavité de la courbe s(t) s'inverse au point d'inflexion rc = l/o>o qui définit
la constante de temps, en régime critique.
g) Systèmes d'ordre n supérieur à 2
La réponse indicielle d'un système d'ordre n > 2 est plus difficile à analyser. La solution se met
sous la forme d'une combinaison linéaire de réponses d'ordre 1 et de réponses d'ordre 2 (cf. annexe 1).
Deux observations peuvent être faites néanmoins :
i) le système est pseudo-périodique ou apériodique,
ii) le régime transitoire présente une durée caractéristique.
Par exemple, la figure 4.18 représente la réponse indicielle d'un système d'ordre 5 , superposition
de deux ordres 2 et d'un ordre 1 ; deux pulsations propres différentes sont présentes, ce qui se traduit
par une modulation de l'amplitude du signal.
s{t)
s{oq)-
0
Fig. 4.18.
134
4. Régimes transitoires
III. — ETABLISSEMENT D'UN REGIME VARIABLE
III. 1. — Circuit du premier ordre en régime harmonique
Dans le circuit de la figure 4.1, supposons l'interrupteur Ky fermé, à un instant pris comme origine. La
loi des mailles donne alors :
Ri-\-~ = iie{t)
ue désignant la tension sinusoïdale délivrée par la source : ue{t) — um cos(wr).
TI vient, en exprimant l'intensité i = Aq/d^ du courant dans le circuit en fonction de la tension
uc = q/C aux bornes du condensateur, et en introduisant r = RC :
duc , 1uc
Um
[ -,
—
h — = -— COSicot )
dt
T
T
Le circuit est du premier ordre, puisque l'ordre de dérivation le plus élevé dans l'équation est un. La
solution de l'équation homogène ucj , c'est-à-dire le régime libre, s'écrit (cf. annexe 1) ;
«c,/(0 = Cte x exp
où Cte est une constante fixée par les conditions initiales. Le régime libre s'amortit donc d'autant plus
rapidement que la constante de temps r du circuit est faible, c'est-à-dire que R est faible.
Quant au régime établi, on l'obtient en recherchant une solution particulière de forme sinusoïdale.
En notation complexe (cf. annexe 1) :
d ur
uc
u
_j—x
— —t
dt
r
r
avec
u = um
~~m
.
soit encore
iir =
um
1 + jù)T
On obtient finalement le régime établi uc,e (t) '■
Uc,e(t) = Re{Mcexp ijcot)] = - —
UmCOs{ù)t) + -
+^t^2
Um sin
(^0
On en déduit la solution générale de l'équation différentielle :
uc{t) = Uc,i{t) + UcA*) =
Cte x ex
P
\
t/
+ -—-7—7X Um cos{ù)t) +
^
I +
I -H
- um sm{cot)
Notons que la charge du condensateur et la tension à ses bornes évoluent sans subir de discontinuité :
q(t)-q{$)= f i^dt'
Jo
Le condensateur étant initialement déchargé, la condition initiale Mc{0) — 0 conduit à :
0 = Cte -t-
7—77
1 + {(OT)2
soit
Cte - —
7—77
1 + (cot)2
Finalement, on obtient :
«c(0 = r-—7—77 um [cos(<ut) - exp f--)] + . , ^ ,7 u,n s\n(ù)t)
l + ((otV
l
V r/i + {(otY
Régimes transitoires
135
III. 2. — Circuit du premier ordre alimenté par des signaux carrés
Reprenons le circuit RC de la figure 4.1 en l'alimentant par une source de tension qui délivre des
signaux carrés symétriques (de rapport cyclique 1/2 ), c'est-à-dire dont la durée r/2 des alternances
positives est la même que celle des alternances négatives, T étant la période. On suppose qu'initialement le condensateur est déchargé.
La tension uc aux bornes du condensateur évolue au cours de chaque demi-période selon un arc
d'exponentielle. L'intensité i du courant électrique, proportionnelle à la tension ur — rdwc/dt aux
bornes du résistor est, elle, discontinue.
En pratique, plusieurs cas se présentent, selon la fréquence / = l/T des signaux carrés d'entrée,
comme le montrent les figures 4.19 et 4.20. Ces dernières correspondent au cas concret où R = 2 kfi et
C = 100 nF, d'où la constante de temps r = 0,2 ms qu'il convient de comparer à différentes périodes
du signal délivré par la source d'alimentation : 6 ms , 0. 8 ms et 67 (jls respectivement inverses des
fréquences 167 Hz, 1,25 kHz et 15 kHz.
uc{t)
Um
f= 1,25 kHz
f = 167 Hz
/ = 15 kHz
Un
3r
15r
b)
a)
FIG. 4.19.
167 Hz
i{t)
/ = 1,25 kHz
i(t)
/ = 15 kHz
Um
~R
L.
4 -►
15r
a)
21
b)
c)
FIG. 4.20.
i) Basse fréquence (/ -C (2r)
1
ou J,/2 >■ r )
Le régime établi est atteint au cours de chaque demi-période. La réponse du système est une succession de réponses à des signaux échelons. Le condensateur se charge et se décharge entièrement dans
le résistor. La tension aux bornes du condensateur est proche de celle imposée par le générateur de signaux carrés à sa sortie. Le courant électrique circule par alternances impulsionnelles, pendant la durée
d'une charge ou d'une décharge du condensateur, soit environ 3t .
4. Régimes Transitoires
136
ii) Fréquence intermédiaire (/ ~ (2r)
1
ou 7/2^7)
Une demi-période est trop courte pour établir un régime forcé ; comme les arcs d'exponentielles ne
sont pas achevés, le condensateur ne se charge que partiellement. Le signal est fonné d'une succession
de régimes transitoires et devient périodique après quelques r.
iii) Haute fréquence (/
(2r)_1 ou 7/2 C t )
Les arcs d'exponentielles n'ont pas le temps de se développer et sont proches de droites, dont
les pentes sont alternativement positives et négatives. La tension lic ressemble à des signaux triangulaires et l'intensité du courant à des signaux carrés. Le condensateur se charge très peu, la tension à ses
bornes tic = q/C est donc d'autant plus faible que la fréquence est grande. On retrouve le comportement en court-circuit du condensateur en haute fréquence. Le régime variable ne s'établit qu'après
amortissement du régime libre, c'est-à-dire sur environ 3t , ce qui représente plusieurs périodes de la
source. On observe un régime transitoire au cours duquel la composante stationnaire de la tension triangulaire uc s'amortit progressivement.
V
Remarque : A basse fréquence, la tension aux bornes du résistor est proportionnelle à la dérivée de
la tension d'alimentation du circuit. À haute fréquence, la tension aux bornes du condensateur est proportionnelle à l'intégrale de la tension d'alimentation du circuit. Nous préciserons ultérieurement ce comportement lors de l'étude des filtres du premier ordre (cf.
chapitre 6).
III. 3. — Circuit du deuxième ordre alimenté par des signaux variables
Dans un circuit du deuxième ordre, la forme des signaux dépend de la valeur du facteur de qualité
Q. La figure 4.21 représente graphiquement l'évolution de la tension uc aux bornes du condensateur
d'un circuit RLC série, pour deux régimes :
i) en signaux carrés, basse fréquence, pour un régime pseudo-périodique Q = 1,92.
ii) en signaux sinusoïdaux pour un régime apériodique Q = 0,45 .
uc{t)
ô= 1,92
0 = 0,45
a)
b)
FIG. 4.21.
IY. — APPLICATIONS
IV. 1. — Réalisation de tensions en dents de scie
Il est possible de réaliser une tension en dents de scie, à partir d'un générateur délivrant des signaux
carrés, à l'aide d'une cellule RC convenablement calculée, travaillant, sur chaque période, en régime
transitoire (Fig. 4.22).
137
Régimes transitoires
Le condensateur subit une succession de charges et de décharges. Le circuit du premier ordre
est caractérisé par la constante de temps r = RC. Si r est grand devant la période T des signaux
carrés, les arcs d'exponentielles n'ont pas le temps de se déployer. On observe en sortie des signaux
triangulaires.
Le calcul des valeurs R ei C dépend de la fréquence f = 1/7' des signaux d'entrée iie. En pratique,
t > 2T convient. Pour / = 10 kHz, C = 220 nF et r = 27, on trouve la valeur suivante de la
résistance :
_ r _ 27 _ 2
2
R
~C~~C~Cf~ 220 x 10-9 x 10 x 103 ^
R
C
Ue
7777
Us
7777
FlG. 4.22.
IV. 2. — Circuit détecteur de crêtes
On sait qu'un circuit électrique linéaire perd la propriété de linéarité s'il comporte une diode. La
recherche de régime transitoire fait apparaître plusieurs cas qui correspondent aux états passant et bloqué
de la diode.
Considérons le circuit de la figure 4.23a dans lequel la diode est supposée idéale, c'est-à-dire
sans tension de seuil ni résistance dynamique. La source électrique délivre une tension sinusoïdale,
de fréquence / = &>/{27t) — 1/7, à partir de l'instant fo = —7/4, ce qui s'écrit à l'aide de la fonction
d'Heaviside :
ue — Y (V — /q) um cos (tôt)
i) Lorsque la diode est passante, la tension à ses bornes est nulle, et la tension aux bornes du circuit
RC parallèle est identique à celle de la source :
due
ue
llC — ue
l — le é- Ir — Cdt
R
.Ue,Uc
i
■
i "c
■r .
r
q
UR
R
C
iK^c
/
/
11 \
M
G
0 t\ \
fîl
\ Ue /
\ /
'
uc
T
1 ^
\
\
\
»
t
b)
a)
Fig. 4.23.
ii) Lorsque la diode est bloquée, c'est-à-dire polarisée en inverse, la tension aux bornes du circuit
RC parallèle est supérieure à la tension de la source. Aucun courant ne traverse la diode. Le circuit
évolue en régime libre et la loi des mailles fournit l'équation :
uc > u.
avec
RC
d lie
dt
h «r = 0
et
i=0
4. Régimes transitoires
138
Analysons le comportement du circuit au cours du temps. À l'instant r = ro, le condensateur est
déchargé, uc = 0. Lors du premier quart de période, la tension ue de la source est croissante. La diode
est passante et l'intensité i du courant est positive ; une partie ic = Céucj d / = C duel dt charge le
condensateur et l'autre îr = iie/R s'écoule dans le résistor. À l'instant r = 0, la tension ue décroît.
Le condensateur commence à se décharger et ic < 0. Lorsque Ïr
ic = i = 0, h l'instant q , la
diode se bloque et la tension de la source continue de décroître. La tension uc devient supérieure à ue.
Le condensateur se décharge en régime libre, jusqu'à ce que la tension de la source, à l'instant ^ » soit
suffisante pour qu'il se charge à nouveau. La diode se bloque à l'instant t\ tel que :
diie
i = C~â7
f =
0
ce qui donne :
rwsin (ruq) = cos (wii)
soit
tan{wri) = —
TCO
La tension aux bornes du condensateur évolue alors en régime libre :
d Uc
„
r—
uc — 0
dî
.
soit
. .
ucit) = um sxp
t — t\
cos {toti )
avec
r = RC
L'annulation du courant impose à l'instant f| des tangentes identiques pour les courbes ue(t) et uc{t).
Puisque rusin {cot\) = cos {W|) /r , il vient :
d Uc / \
Ufll
y
.
d Ug y .
• /
\
tlfjl
y
•.
——(q) =
cos(w/i)
et ——[ti) =—umù)sm{û)t\) =
cos(aif|j
d/
r
dr
r
Le condensateur recommence à se charger à partir de l'instant t2 , pour lequel les tensions sont à nouveau
égales uc(t2) = ^(/h) Une application intéressante de ce montage est souvent utilisée lorsque t
T, c'est-à-dire lorsque la
pente de décharge du condensateur est faible (Fig. 4.23b). Le signal en sortie épouse alors l'enveloppe
du signal d'entrée, d'où le nom de circuit détecteur d'enveloppe ou de crêtes (cf. chapitres 9 et 16).
IV. 3. — Lissage d'une tension redressée
Les régimes transitoires sont utilisés dans le lissage d'une tension redressée afin d'obtenir une tension proche d'une tension stationnaire. Supposons la diode parfaite dans le montage de la figure 4.24a.
La tension d'entrée du circuit est une tension redressée en double alternance de forme ue = uin \ s\n{cot) \
(Fig. 4.24b).
Ue, Wç
B
dZ
R
C
r
A
D
I Uf
7777"
a)
b)
FIG. 4.24.
Supposons que le condensateur soit en charge, ic > 0, d'où la tension croissante us à ses bornes
dï/y
lC — C—;— > 0
dr
Régimes transitoires
139
La diode débite le courant d'intensité i = ic+ô?, et donc us = ue (portion AB). Lorsque us commence
à décroître, le condensateur se décharge. On a alors ic < 0 (portion BC). La diode cesse de suivre et
se bloque dès que le courant d'intensité —ic, fourni par le condensateur, est suffisant pour alimenter la
résistance, c'est-à-dire lorsque i s'annule :
n
i=0
soitt
■ = —ic
•
in
— = — C-.dw^
R
dr
ce qui se produit, sur la première alternance, à l'instant tc tel que :
um sin{(otc) = RC umcocos{(otc)
soit
i
et» donc
1
tc — — arctan (tco)
O)
avec
r = RC
Une fois bloquée, la diode ouvre le circuit et le condensateur se décharge transitoirement dans la résistance R (portion CD). La diode redevient passante lorsque us = ue et le condensateur se charge à
nouveau. Un lissage s'opère donc grâce à une succession de régimes transitoires.
IV. 4. — Allumage des moteurs à explosion
Le fonctionnement du système d'allumage des moteurs à explosion est donné sur la figure 4.25.
L'objectif est d'obtenir, à partir de la tension stationnaire de 12 V fournie par la batterie du véhicule,
une tension suffisamment élevée, afin de produire une étincelle dans les bougies et ainsi de provoquer la
combustion du mélange carburant-air.
Bougie
Batterie
FlG. 4.25.
Initialement, l'interrupteur Ai est fermé ; le courant dans le circuit 1 est stationnaire, i{jS)=E/r.
Lorsqu'on l'ouvre, le courant s'écoule dans le condensateur qui se charge, et son intensité dans le circuit du second ordre oscille. Pour obtenir une tension élevée dans le circuit 2, aux bornes de la bougie,
on utilise un transformateur élévateur de tension, en pratique un solénoïde plongeur (cf. Elecîromagnétisme).
V. — UTILISATION DE LA TRANSFORMATION DE LAPLACE
V. 1. — Méthode
L'utilisation de la transformation de Laplace pour la résolution des équations d'un circuit linéaire
se révèle d'une grande efficacité technique. Les opérateurs de différentiation se transforment en multiplication par la variable symbolique p . Pour les signaux fondamentaux, tels qu'un échelon, une sinusoïde, une impulsion, l'équation du circuit se ramène à une fraction rationnelle. La décomposition en
éléments simples permet d'obtenir la transformation inverse, en utilisant la table de transformation des
fonctions usuelles (cf. annexe 3).
Pour un système initialement au repos, les conditions initiales d'une grandeur qui ne subit pas de
discontinuité s'expriment simplement. En effet, si à l'instant initial /o+ =
Qui succède immédia+
tement à l'établissement du régime, le signal ^(0 ) reste nul, la transformée de Laplace de sa dérivée
4. Régimes Transitoires
140
s'obtient par simple multiplication par p de sa transformée de Laplace S(p) :
TL
{^w} =;?%)-^0+)
soit
tl{^W}=^{P)
V. 2. — Application à la réponse indicielle
Considérons un système linéaire, d'ordre n , initialement au repos et supposons les dérivées successives du signal s{t) continues jusqu'à l'ordre w—1. Si le signal d'entrée est un échelon, e{t) — emY (t),
l'équation de ce système se réduit à :
dk s
a
k
d5
....
+ ■ ■ • + ai — + rïo s{t) — emY(T)
La transformation de Laplace de cette équation donne, avec des conditions initiales nulles :
akPk S{p) +
\-alp S{p) + ao S{p) = —
S{p) =
p(pkcik H
ai + «o)
a) Systèmes d'ordre 1
L'équation d'un système du premier ordre, excité par un échelon, s'écrit :
ds
r— +s(/) = Aq em Y(f)
En prenant la transformation de Laplace de ses deux membres, on obtient :
s(p)
=
^
SW=Aoe
"'G"^Ti)
puisque
p(/?r + 1)
p
pr + 1
par décomposition en éléments simples. On retrouve alors, par transformation inverse, le résultat déjà
établi :
S(t)=Aoem 1 — exp
h) Systèmes d'ordre 2
De même, l'équation d'un système, du deuxième ordre, excité par un échelon, s'écrit :
à~ s
2
dt
+
1 Q.
d iSs
rP dt
+ 0)1 s{t) = Ao 0)1 em Y(/)
ce qui donne, en prenant la transformée de Laplace :
S{p) = Aoem
P (P2 +p/Te + col)
141
Régimes transitoires
En décomposant en éléments simples le membre de droite, on obtient, selon la valeur du facteur de
qualité Q = ù)QTe , avec les notations habituelles :
pour
pour
pour
Q
> ^
ô
Q
^
= -
S{p)= Aoc,
S
ip)
= A e
^ m
S{p) = A^e,
l/(2Te)
1
l/(2r.)
2
P
^+1/(2T,)] + W2
1
P + l/rg
P
[P + l/(2re)]2 — P2
1
1
p
p+
1^+I/(2T,)]2 + ^
(j? + ù)0y
La transformation inverse permet de retrouver les relations déjà établies relatives au régime transitoire
(Fig. 4.26) :
1
pour
Q
>
pour
Q
<
pour
Q
2
1
2
1
~ 2
t
.(/)
2re
t
s{t)
2t.
COS (ùJat)
cosh (/3f) +
1
2Teù)a
1
sin {coat)
sinh [fit)
s{t) = Aoem [l - (1 + ^o?) exp (-wq?)]
s(t)
s(î)
«2=1
0=1/4
0=1/2
(Ont
FIG. 4.26.
V. 3. — Réponse impulsionnelle
a) Signal impulsion
Physiquement, une impulsion est un signal dont la durée r est très courte devant les constantes
de temps du système et dont l'amplitude est inversement proportionnelle à r . On la représente à Laide
d'un pic de Dirac noté d(t) (cf. annexe 2) et relié à la fonction d'Heaviside par l'équation :
5(r) =
dY
df
Remarques : 1) Il est impossible de réaliser physiquement un pic de Dirac ; cependant, il est possible
de s'en approcher, par passage à la limite de fonctions, par exemple la fonction rect(r)
(cf. annexe 2) :
8{t) — lim - rect (
r—*0 T
\TJ
\ T.
2) Le dirac S(t) a la dimension de l'inverse d'une durée.
142
4. Régimes Transitoires
b) Application aux systèmes
La transformation de Laplace permet de calculer simplement la réponse impulsionnelle, c'est-àdire le régime transitoire de ce circuit lorsqu'il est excité par une impulsion. En effet, on a, au sens des
distributions :
TL {5(0} = TL { ^|i= pTL {Y(0} = P X
1
Un système linéaire soumis à l'impulsion e{t) =
S{t), où d? est une constante homogène à un flux
électrique, produit d'une tension par une durée, a pour équation :
dks
^ d/*
d.?
+
..
,
s
H «i — + «o-<0 = ^ 8{t)
En prenant la transformation de Laplace des deux membres de l'équation, le système devient :
akpkS{p)
ai pS(j.i) +aoS{p) = <£>
d'où
S{p) = —
pKa +
h p<3| + «o
c) Circuit du premier ordre
Pour un circuit du premier ordre, par exemple un circuit RC série, alimenté par une impulsion de
tension d>5(r), l'équation précédente donne, si le signal de sortie est la tension «cW ^ux bornes du
condensateur :
u
c(p) = y^-t
Le régime transitoire, c'est-à-dire la réponse impulsionnelle du circuit, s'obtient par transformée de
Laplace inverse :
«cW = fexp (-t)
Remarques : 1) La discontinuité de uc{t) en r = 0 est due au modèle théorique de l'impulsion qui
suppose l'apparition d'un courant infini, ce qui est physiquement exclu.
2) Dans le cas simple du système linéaire précédent, il est possible de calculer aisément le régime transitoire, sans recourir au formulaire de la transformation de Laplace
(cf. annexe 3). En effet, on sait que, pour f > 0, l'équation différentielle linéaire du premier ordre admet pour solution iis{î) — Cte x exp(—f/r). Pour calculer la condition
initiale, il suffit d'intégrer l'équation différentielle de ce système autour de l'instant origine :
^ 5(r)
donne
J
dr = J
soit, en effectuant :
r
Jo-
dw, = dW
—df = <E) /
d Y = <I>
Jo- ^r
Jo-
Comme Mj(0 ) ^ 0 , on en déduit «5(0+) = <&/r .
d?8{t)dT
Régimes transitoires
143
CONCLUSION
Retenons les points essentiels.
1) Le régime transitoire est la superposition de la réponse libre et de la réponse établie. La réponse
libre est solution de l'équation différentielle homogène et la réponse établie une solution particulière de
l'équation différentielle avec son second membre. Les constantes qui interviennent dans l'expression de
la réponse libre sont déterminées par les conditions initiales.
2) La tension aux bornes d'un condensateur évolue sans subir de discontinuité en raison de la
continuité de l'énergie électromagnétique. De même, le courant électrique qui traverse une bobine évolue sans subir de discontinuité.
3) La réponse indicielle d'un système permet d'évaluer ses constantes de temps. Un signal carré de
tension [0 — «,?,] peut être considéré comme une répétition de signaux échelons si sa période est grande
devant les constantes de temps du système.
4) L'équation différentielle d'un système linéaire stable du premier ordre se met sous la fonne :
r
57
+ 5= Aoe
^
La constante de temps r du système est reliée à la durée de montée par r « tm/2y 2 .
5) L'équation différentielle d'un système linéaire stable du deuxième ordre s'écrit :
d2 s
1 d.v
TT/T
^
ci r
Te 77
Qt
9 . ,
0'ç(r) —
2
,
. ,
+ w
Le régime libre est pseudo-périodique si Q = coo^e > 1/2 et apériodique si 0 < 1/2,
6) La transformation de Laplace présente un intérêt technique dans la recherche du régime transitoire d'un circuit linéaire.
c
Û
(M
T—1
EXERCICES ET PROBLÈMES
P4-1. Durée de montée d'un circuit RC
(5)
Un condensateur, de capacité 1 pP, monté en série avec un résistor, est alimenté par une source
de tension stationnaire de 6 V . La figure 4.27 représente l'écran d'un oscilloscope à mémoire, obtenu
après la mise sous tension du circuit, avec un balayage de 1 ms • div~1 .
u
1. Calculer la valeur de la résistance du circuit ?
2. Quelle est l'énergie emmagasinée dans le condensateur à l'issue du régime transitoire ?
3. Comment mesurer la durée de montée si l'on ne dispose pas d'un oscilloscope à mémoire ?
144
4. Régimes Transitoires
100
90
10
0
Fig. 4.27.
P4- 2. Réponse indicielle d'un circuit RL
Une bobine, d'inductance 50 mH, est alimentée par une source de tension stationnaire de f.e.m
12 V et de résistance interne 50 Û. L'enroulement de la bobine présente une résistance de 5 0. On
ferme le circuit à l'instant initial / = 0.
1. Etablir l'équation différentielle donnant l'intensité i du courant électrique.
2. Comment évolue la tension ue aux bornes du générateur ?
3. Effectuer un bilan d'énergie et calculer l'énergie dissipée, lors du régime transitoire, pendant
une durée égale à trois fois la durée caractéristique du circuit.
P4- 3. Décharge d'un condensateur dans un autre condensateur
Un condensateur, de capacité Ci = 20 nF, a été chargé sous une tension stationnaire de 3 V par
le biais d'un interrupteur à deux positions (Fig. 4.28).
1. L'interrupteur est en position 1. Calculer la charge Qi du condensateur et F énergie électrique
£i qu'il emmagasine, lorsque le régime est établi.
2. On bascule l'interrupteur en position 2 . Le premier condensateur se décharge dans un second
condensateur, de capacité C2 - Comment évoluent les tensions u\ et 112 aux bornes des condensateurs ?
3. Quelle est l'énergie 82 du second condensateur, de capacité 0,1 jxF ? Calculer l'efficacité
rj = £2/Es du transfert d'énergie de la source Es vers le second condensateur.
4. Quelle aurait été l'efficacité du transfert d'énergie dans ce condensateur, si les deux condensateurs avaient été de même capacité ?
P4- 4. Oscillations de relaxation avec un tube au néon
Un tube au néon s'allume lorsque la tension à ses bornes dépasse «/, = 60 V ; sa résistance est
alors r — 90 11. Le tube s'éteint si la tension descend en dessous de Lih = 50 V, car sa résistance
devient alors très importante. Le tube est incorporé dans le circuit de fonctionnement de la figure 4.29,
dans lequel E = 100 V , i? = 1 kO et C = 2 jjlF .
1. Établir les équations différentielles qui traduisent l'évolution de la tension aux bornes du tube.
On considérera successivement le tube au néon éteint puis allumé.
145
Régimes transitoires
1
Tube au néon
r
5)
c
2
•-
u\
C,
V
E
UR
c2
U2
1
R
R
UR
FIG. 4.28.
FIG. 4.29.
2. Montrer que la tension lie aux bornes du condensateur oscille avec la période :
T = TR]n
\E-uhJ
\ET/TR-UbJ
tr et r étant deux durées que Ton déterminera. Calculer la valeur de la période de ces oscillations de
relaxation.
P4- 5. Décharge d'un condensateur dans un circuit RLC
: vje
^é
Dans le circuit de la figure 4.30, le condensateur 1, de capacité Ci , porte initialement la charge
Qi = 10-5 C . Le condensateur 2 de capacité C2 est déchargé ; en outre, C| = 100 nF, C2 = 220 nF,
L = 50 mH et R est réglable de 100 fi à 1 kfi.
1. Établir l'équation différentielle d'évolution de la charge qi (t) du condensateur 1.
2. Résoudre l'équation précédente pour R = 400 fi . Étudier l'évolution de l'intensité i du courant
dans le circuit.
3. Comment éviter les oscillations ?
UR
r"C
C,
C2
ic
lL
\
o
\
c
r
L
UL
FlG. 4.30.
Fig. 4.31.
P4- 6. Circuit RLC parallèle
Sur la figure 4.31, le condensateur est initialement déchargé et aucun courant ne circule dans les
branches du circuit. A l'instant initial, on ferme l'interrupteur ; la source délivre une tension stationnaire
£, C — 10 nF, L = 40 mH, R — 5kÙ et r= IkO.
1. Quelles sont les valeurs de Îr , ic , ii, h et ur, immédiatement après la fermeture de l'interrupteur ? Que deviennent-elles en régime établi ?
2. Déterminer l'équation différentielle d'évolution de la tension ur. Calculer le facteur de qualité
Q et la constante de temps du circuit.
3. Résoudre l'équation différentielle précédente.
4. En déduire l'évolution temporelle de toutes les grandeurs électriques, intensités et tensions, du
circuit.
4. Régimes Transitoires
146
P4- 7. Trains d'impulsions rectangulaires dans un circuit RC
Un circuit RC série est alimenté par une source de tension qui délivre des signaux rectangulaires,
de période T = 0,1 ms. La tension délivrée est E = 10 V, en début de période sur la durée ah T,
ah = 0,3 étant le rapport cyclique, et 0 V le reste de la période. On suppose la durée caractéristique
r = RC = 10 ms du circuit très grande devant la période T de la source de tension. Le condensateur
est initialement déchargé.
1. Calculer les valeurs de la tension tic aux instants q = ahT et ^ — T . Le régime est-il établi
à l'issue de la première période ?
2. Établir une relation entre les tensions minimale et maximale, aux bornes du condensateur, respectivement, n étant un entier,
= uc{nT) et Umaxin) = uc{nT + o^T),
3. Exprimer
et umax(n) en fonction de n , T, r et £ . On remarquera que le terme général
de la suite
= aiik + b s'écrit
= akUQ + è(l — cik)/{l — a).
4. Quelle est la durée du régime transitoire ? Commenter.
5. Calculer le taux d'ondulation {umax — «,„,„)/£.
P4- 8. Inductance alimentée en simple alternance
Une bobine, de résistance interne r, est alimentée, à travers une diode supposée parfaite, par une
source de tension sinusoïdale d'amplitude um et de pulsation a) : u-e = umsm{o)t) (Fig. 4.32).
1. Étudier l'évolution du courant dans le circuit.
2. Quelle est la durée du passage du courant par période? La calculer à l'aide d'un microordinateur, pour L = 100 mH, r = 10 Q et / = 50 Hz .
FIG. 4.32.
P4- 9. Diode de délestage ou diode de « roue libre »
Fig. 4.33.
: vveb
^
Dans le circuit de la figure 4.33, les diodes sont supposées idéales et la source délivre une tension
sinusoïdale d'amplitude iim et de pulsation m : iie — umûïi(o)t).
1. On désigne par /'o l'intensité du courant dans la bobine, à l'instant initial. Quelle est l'intensité
du courant à l'instant t = T = 2tt jco ?
2. Calculer îq en régime établi pour L = 100 mH , r = 100 O,, f = 1 kHz et um = 24 V .
3. En s'appuyant sur une analogie mécanique de roue de bicyclette entraînée par un pédalier, justifier l'appellation de diode de « roue libre ».
147
Régimes transitoires
P4-10. Circuit RC parallèle
Le circuit de la figure 4.34 est alimenté par une tension sinusoïdale ue = um cos{cot). Initialement,
le condensateur est déchargé et aucun courant ne circule dans le circuit.
1. Quelles sont les conditions initiales sur les grandeurs électriques du circuit immédiatement après
la fermeture de l'interrupteur?
2. Établir et résoudre l'équation différentielle d'évolution de la tension uc ■
3. La fréquence de la tension d'alimentation est / = 2 kHz et son amplitude vaut 6 V. Sachant
que /? = 10 kQ et C = 100 nF, sur combien de périodes s'étend le régime transitoire ?
ic
'1
R
c:
Uc
R
Fie. 4.34.
P4-11. Impulsions dans un circuit RLC
Un circuit RLC série est alimenté par des impulsions de tension <3><5(r) et de fréquence
/ = 1 kHz ; en outre, C = 0,2 pF, L = 2 mH et R = 5 kfi.
1. Déterminer l'équation différentielle d'évolution de la tension uc aux bornes du condensateur.
2. Résoudre l'équation précédente. Le régime établi est-il atteint entre deux impulsions successives ?
P4-12. Sonde d'un l'oscilloscope
La voie d'entrée d'un oscilloscope peut être représentée par l'association en parallèle d'un condensateur Cos = 25 pF et un conducteur ohmique de résistance Ros = 1 Mfi . Introduit dans un circuit,
l'oscilloscope peut en modifier significativement les caractéristiques. On observe alors des signaux déformés. Pour pallier cet effet indésirable, on utilise une sonde de compensation qui prélève le signal du
circuit, et dont les caractéristiques sont données sur la figure 4.35.
H
Oscilloscope
C*
Ros
Sonde
FlG. 4.35.
1. Etablir l'équation différentielle d'évolution de la tension u0 en fonction de ue .
148
4. Régimes Transitoires
2. Quelle condition doit être réalisée pour avoir uox(t) — Kue{t) ? Préciser la valeur de K. On
désigne alors par Cso la valeur de la capacité de la sonde.
3. On règle la sonde compensatrice, à l'aide d'une tension échelon. En pratique, on utilise un générateur de signaux carrés. Quelle gamme de fréquence doit-on choisir ?
4. Établir la relation entre les transformées de Laplace TL {w(W} et XL {we} ■
5. On dit que la sonde est sur-compensée lorsque Cos > Cso . Quelle est alors la valeur de u0
immédiatement après le début du régime transitoire. Même question pour une sonde sous-compensée
r ^
< C
^OS
^SO '
6. Donner l'allure du signal uos(t) observé à l'oscilloscope, pour une sonde sur-compensée, une
sonde compensée et une sonde sous-compensée.
T!
O
C
3
Û
rsi
O
(N
(5)
4-1
JZ
"s_
>CL
O
U
5
Théorèmes de base dans
l'analyse des réseaux linéaires
L'analyse des circuits par application directe des lois de Kirchhoff s'avère souvent très laborieuse,
surtout lorsqu'on ne s'intéresse qu'à l'état électrique d'une seule branche, précisément à la tension entre
ses deux nœuds et à l'intensité du courant qui y circule. Lorsque les circuits sont linéaires, il est possible
et commode de remplacer le reste du réseau soit par un générateur de tension soit par un générateur de
courant. Si l'on souhaite déterminer l'état électrique de l'ensemble du réseau, c'est-à-dire l'ensemble
des courants et des tensions, la linéarité du système d'équations à résoudre suggère fortement d'utiliser
le calcul matriciel, en s'aidant de méthodes numériques (cf. annexe 6).
I. — THÉORÈMES DE BASE
Le premier des théorèmes de base des circuits linéaires est le théorème de supeiposition. Il permet
d'établir tous les autres.
1.1. — Théorème de superposition
a) Relation linéaire
La mise en équation d'un réseau, constitué de dipôles linéaires, par application des lois de Kirchhoff, conduit à un système d'équations linéaires dont les seconds membres sont des combinaisons
linéaires des termes de source, forces électromotrices (f.e.m) ou courants électromoteurs (c.e.m) stationnaires
et 2* (iota majuscule) ou variables
et i(t) (iota).
Nous supposons ces sources indépendantes, c'est-à-dire que leurs caractéristiques ne dépendent
d'aucune intensité ou tension du réseau. Ainsi, l'état électrique du circuit représenté sur la figure 5.1a,
qui est alimenté par les sources stationnaires de tension E et de courant X, satisfait aux deux équations
de mailles suivantes :
E = RyJ\ + R{J\ -f L)
et
0 = R(J{+h)+R2h-Rï{X-h)
ce qui donne, en regroupant les différents termes ;
£={/?,+/?)/,+i?/2
et
R^X = RI] +{R+R2+R3)h
150
5. Théorèmes de base dans l'analyse des réseaux linéaires
Ce système peut se mettre sous la forme matricielle suivante :
[S] = [R][I]
où les matrices « source », « résistance » et « intensité » ont pour expressions respectives
[S]
E
R3I
[*] =
-^1
A
^2
R\+R
R
R
R2
R
R3
et
R\
E
/1
A
[/] =
^2
h
R
R
R3
R3
B
B
}■Ox
-CD- X
b)
a)
Fig. 5.1.
L'état électrique de ce réseau peut être considéré comme la superposition de deux états :
i) le premier a admet 1les courants l\a) et
soit [S^j = [R] [/^-)] avec :
, lorsque les générateurs se réduisent à la f.e.m E,
ria)
et
[S^] =
H) Le second (3 admet les courants
soit [S^] = [X] [T'bbj avec :
[s(/3)]
et
0
R3I
[/(")] =
r(«)
, lorsque les générateurs se réduisent au c.e.m X,
rih)
et
[7^]
rU)
En sommant les deux équations matricielles [5'^^] = [R] [/^] et [S^] = [7?][/^] on restitue l'équation matricielle initiale :
[s'"'] + [S<«] = [«]([/<"'] +[/<«])
qui donne bien
[S] = [/?] [7]
h) Énoncé du théorème de superposition
En raison des équations linéaires qui relient les courants dans les différentes branches d'un réseau
linéaire, comportant des sources de tension et de courant, le théorème de superposition s'énonce ainsi ;
le courant produit dans une branche par un ensemble de générateurs indépendants est la somme des
courants produits par chacun d'eux, les autres étant éteints.
Éteindre un générateur de tension signifie ramener sa f.e.m à zéro et donc à le remplacer par un
court-circuit ; éteindre un générateur de courant signifie ramener son c.e.m à zéro et donc à le remplacer
par un coupe-circuit.
Théorèmes de base dans l'analyse des réseaux linéaires
151
Exemple : calculons l'intensité du courant qui parcourt la branche AB, avec la résistance R, dans
l'exemple précédent, pour R] = 30, R2 = 12 H, i?3 = 6n, R = 6 fl, E = \2W et X = 3 A.
i) L'état a est celui dans lequel la source de courant est passivée, c'est-à-dire remplacée par un
coupe-circuit (Fig. 5.2). On reconnaît ici un diviseur de tension avec deux résistances, l'une Ri et
fa)
/?3 ). L'intensité /^e du courant dans la
l'autre la résistance équivalente à i? en parallèle avec (R2
branche AB, avec la résistance R, vaut :
(a) _ UAB
IAB
R
avec
UAb =
R//{R2A-R3)
9/2
Ri XR/I{R2A-R3)
3 + 9/2
R^
x 12 = 7,2 V
d'où
R\
Ri
Ri
/(+
/(a)
a)
I
R
!i
R
Xb = 1,2 A
(iS)
R3
R3
B
X
B
Ox
FIG. 5.2.
Fig. 5.3.
ii) L'état (3 est celui dans lequel la source de tension est passivée, c'est-à-dire remplacée par un
court-circuit (Fig. 5.3). On reconnaît là un diviseur de courant avec deux conductances, l'une G3 et
l'autre la conductance G'2 équivalente à G2 en série avec G et G\ en parallèle. L'intensité du courant
dans la branche où se trouve G2 vaut donc :
I (X)
G'
G2 + G3
L'intensité
X
1
x=
I + G3/G2
1
\ A-R2/R3
X
R3
X
R3R2 A-R//R\
6 + 12 + 2
x3 = 0,9 A
s'écrit alors :
r(^) _
MB
G
rGS) _
G + G,
On en déduit : Ïab = ri? + ri?
=
z
/?.
R + Ri
ri/3) = - x 0,9 = 0,3 A
F5A.
1.2. — Théorème de Thévenin
Dans le circuit linéaire de la figure 5.1a ouvrons la branche AB, et calculons alors la tension
(Uab)<j entre les points A et S (Fig. 5.1b). Il vient :
(UAB)0 = E-RIII
avec I\ satisfaisant à la loi des mailles E = {R\ + R2)Ii + i?3(/i + X). On en déduit :
71 =
E-R3X
3^—TT—TT
R\ + R2 + R3
12-18
=
3 + 12 + 6
2
-7
7
=
=
-0'286
A
La tension {Uab)o vaut donc : 12 + 6/7 = 90/7 V. C'est bien ce que l'on mesure avec un voltmètre
numérique, de très forte impédance.
La question qui se pose alors est la suivante : comment retrouver l'intensité du courant qui circule
dans la branche extérieure de connexion AB comportant le résistor, de résistance R = 6 fl, sans
recalculer tout le réseau, à partir de la seule tension {UaB)o que l'on vient de calculer ?
Le théorème de Thévenin permet d'y répondre.
152
5. Théorèmes de base dans l'analyse des réseaux linéaires
a) Démonstration de L. Thévenin
Reprenons le raisonnement que fit le physicien français L. Thévenin dans sa publication originale
en 1883. Il appliqua le théorème de superposition à un réseau linéaire actif, en ne s'intéressant qu'à la
branche extérieure AB reliant deux points A et 5 du réseau et en considérant les deux états suivants.
i) Dans la branche extérieure AB, on insère, en opposition avec la tension {Uab)o entre A et S,
mesurée lorsque la branche extérieure AB est ouverte, un générateur de tension de f.e.m Eti, égale à
(Uab)o ■ Comme ces deux tensions sont en opposition, aucun courant ne parcourt la branche extérieure :
= 0.
ii) On passive le réseau initial, c'est-à-dire que l'on supprime tous les générateurs, en remplaçant les
sources de tension par des courts-circuits et en ouvrant les branches contenant des sources de courant. La
tension entre les points A et S est donc nulle et le réseau se comporte comme un résistor, de résistance
Rfh ■ On insère alors dans la branche extérieure AB un générateur de tension, de f.e.m Ejk , de même
sens que la tension initiale {Uab)o ■ L'intensité du courant dans la branche extérieure AB de résistance
R vaut alors :
/(«
Et
=
''
Rn + R
La superposition de ces deux états donne l'intensité du courant qui circule dans la branche extérieure AB (Fig. 5.4) I = /O) + 7^) soit :
1 =
avec
ETh =
K m -r K
En = (Uab)
ETh= [Uab)o
An
A
Réseau
linéaire
actif
B
Réseau
linéaire
passivé
A
a)
l\ = 0
0
a)
b)
Fig. 5.4.
Exemple : retrouvons l'intensité du courant qui parcourt la branche AS, la résistance R = 6 El
étant connectée. Pour cela, déterminons la résistance interne Rm du réseau entre A et S passivé. Entre
ces deux derniers points, cette résistance Rm s'identifie à R\ en parallèle avec Rj et R \ en série, soit :
RTh =
7/1
i|
3 + 18
=
i?
7
=
2,57 O
'
d'où
1=
90/7
18/7
= 1,5 A
b) Énoncé du théorème
Étant donné un système linéaire quelconque de conducteurs reliés, et renfermant des générateurs
répartis d'une manière quelconque, on considère deux points A et S appartenant au système, entre
lesquels la tension est Uab = La — Le ■ Si l'on vient à réunir les points A et iî par un résistor de
résistance R, ne contenant pas de générateur, la tension Uab devient nulle et l'intensité I du courant
Théorèmes de base dans l'analyse des réseaux linéaires
153
qui parcourt ce résister est donnée par l'expression :
/=
{Uab)o
R'Th + R
dans laquelle Rth représente la résistance du système initial, mesurée entre les points A et 6 , une fois
passivés tous les générateurs. Soulignons bien que VA — Vg est la tension (Uab)o , avant que l'on ne
relie les deux points A et B par le dipôle de connexion de résistance R.
Retenons comment, en pratique, appliquer le théorème de Thévenin :
i) on ouvre d'abord la branche AB dans laquelle on veut calculer l'intensité,
ii) cette branche étant ouverte, on détermine successivement la tension (Uab)<> et la résistance
équivalente Rn entre A et 5 en passivant toutes les sources.
Il suffit alors d'utiliser la formule précédente pour en déduire le courant dans la branche.
c) Extension au régime quasi stationnaire sinusoïdal
Cette extension au régime quasi stationnaire sinusoïdal est immédiate. Il suffit de considérer, en
régime sinusoïdal, en plus des résistances, les impédances offertes par les bobines et les condensateurs
(cf. chapitre 2), ce qui implique d'utiliser la notation complexe. L'intensité complexe du courant dans la
branche extérieure AB d'un réseau linéaire est donc donnée par l'expression :
_ {iLab)O
Ztu + Z
dans laquelle (uAB)0 est la tension entre les deux points A et 5 et Zth l'impédance du réseau mesurée
entre ces points avant que l'on ne les relie par un dipôle de connexion d'impédance Z.
Exemple : dans le circuit représenté sur la figure 5.5, on souhaite détenniner la puissance dissipée
par la charge résistive
= 8 O.
-12/
1
12 a
24 V
8a
/12 a
FIG. 5.5.
Déterminons, à l'aide du théorème de Thévenin, l'intensité complexe i du courant qui parcourt
cette charge. Il vient ;
. _ (M.4g)o
Zn + Rc
Le circuit de charge étant ouvert, la tension {uAB)0 vaut, en reconnaissant un diviseur de tension :
(«4B)„ =
x 24 = 24(1 +j)
154
5. Théorèmes de base dans l'analyse des réseaux linéaires
Quant à l'impédance interne ZTh du générateur de Thévenin, on l'obtient en passivant la source de
tension ; elle se présente comme le résultat de deux impédances en parallèle :
„
12(1 + j){—\2j)
ZT
" - 12(1
- 12/ "
12(1
Il en résulte pour F intensité en ampère ;
24(1
"
+i-)
=
12(1-j) +8
6(1+^^6(1+4;)
5-3/
=
17
^^+7^
On en déduit la puissance dissipée par la charge :
/y i|2
8 x 36(1 + 16)
_
2
8.5 W
2 x 172
Remarque : Dans un circuit constitué de deux sous-systèmes dont l'un est linéaire et l'autre non, le
théorème de Thévenin permet de remplacer le premier par un simple générateur. On utilise
cette propriété pour déterminer le point de fonctionnement d'un dipôle non linéaire, telle
qu'une diode, connecté aux bornes d'un sous-système qui lui est linéaire.
1.3. — Théorème de Norton
a) Démonstration
Le théorème de Norton, du nom de l'ingénieur américain L. Norton qui l'établit en 1926, permet
lui aussi de calculer l'intensité du courant qui circule dans une branche extérieure d'un réseau linéaire
entre deux points A et B ; cependant, dans ce cas, on considère que le réseau se comporte, entre ces
deux points, non comme un générateur de tension, mais comme un générateur de courant (Fig. 5.6).
On l'établit aisément à partir du théorème de Thévenin. En effet, ce dernier s'écrit aussi, en régime
stationnaire (Fig. 5.6a) :
Rrii
Rn + R
En
x —
n+R
Rn
soit, en introduisant le courant de court-circuit Icc ou courant de Norton
R Th
T-
R^+R
T
N
:
Zv — trr —
Le schéma correspondant est celui représenté sur la figure 5.6b.
II est instructif d'écrire le théorème de Norton sous une forme, dite duale de celle du théorème de
Thévenin, dans laquelle on souligne la correspondance entre tension et courant, impédance et admittance, série et parallèle. Pour cela, il suffit d'exprimer la tension UAb aux bornes de la charge R :
UAb = RI=
RRTh
1
IN = —
Rn + 7?
1 /Rn
— Zv
l/R
soit
Uab = ———
Gn + G
où Gn st G représentent les conductances l/Rn & 1/7? (Fig. 5.6c).
Théorèmes de base dans l'analyse des réseaux linéaires
155
Xn
Xn
«77i
En
©
Grh
©
Vab
En
Fig. 5.6.
b) Énoncé
Étant donné un système linéaire quelconque de conducteurs reliés, et renfermant des générateurs
répartis d'une manière quelconque, on considère deux points A et S appartenant au système. En réunissant les points A et S par un simple fil conducteur, l'intensité du courant qui le parcourt est l'intensité
de court-circuit ou de Norton lcc = X^ . Si l'on insère entre A et fi , à la place du fil de court-circuit,
un dipôle de conductance G, ne contenant pas de générateur, le courant entre A et fi prend une valeur différente de Icc, mais la tension UAb est donnée par l'expression :
Uab —
X,N
G Th
G
dans laquelle Gn représente la conductance du système initial passivé, mesurée entre A et fi.
Notons que l'intensité du courant de court-circuit ou de Norton est directement reliée aux caractéristiques du générateur de Thévenin par l'équation Icc = X;v = {UAb)oGti!
Exemple : sur le montage de la figure 5.7, cherchons la tension aux bornes des points A et fi,
lorsqu'on les réunit par un conducteur de résistance fi = 10 fi :
Uab = „In, „
Gn + G
avec
G = 0,1 S
On obtient Gth en remplaçant le générateur de tension par un fil et en ouvrant la branche comportant la
source de courant. Les conducteurs sont alors en parallèle :
™
G
=
è
+
è
=
l)
=
A=
0 083 S
d où
R
'
"' =
12n
Quant à T/v , on l'obtient rapidement en calculant l'intensité de court-circuit, c'est-à-dire en connectant
directement les points A et fi par un fil de résistance nulle :
In = Icc = ^ - 5 = —4,25 À
Remarque : On peut retrouver Xv en effectuant ErhGm , ETh étant la tension entre A et fi, la charge
fi = 10 H n'étant pas connectée. La résolution du circuit initial donne l'équation :
15 = 207 + 30(7- 5)
d'où
1 = 3,3 A
et
LUg = 30(3, 3 - 5) =-51 V
Il vient donc :
XN = UABOth
=
~~\2
= —
^^ ^
156
5. Théorèmes de base dans l'analyse des réseaux linéaires
7
20 n
30 a
^
j 40 a
A
+
n
15 V
2v
10 Ù
30 il
-j 50 fi
5A
B
FlG. 5.7.
FÏG. 5.8.
c) Extension au régime quasi stationnaire
Comme pour le théorème de Thé venin, l'extension au régime stationnaire est immédiate. Il suffit
de considérer, en régime sinusoïdal, en plus des conductances, les admittances offertes par les bobines et
les condensateurs (cf. chapitre 2), ce qui implique d'utiliser la notation complexe. La tension complexe
recherchée est donc donnée par l'expression :
—,4S
=
_|_ Q
aveC
%
=
(MAB)oGTh
dans laquelle G est l'admittance du dipôle de connexion et Gj/j Fadmittance du système initial, mesurée entre les points A et B.
Exemple : déterminons les caractéristiques du générateur de Norton équivalent aux bornes des
points A et B, dans le montage étudié sur la figure 5.8. Calculons Fadmittance équivalente en passivant
le circuit :
1
1
1 w 3 + 4; —5/ = 1
3 — j _ 3 +7
+
Gril =
X
X
-;50 ' 30+740 ~ 10
57(3 + 4/) ~ 50
4 - \i ~ 250
Quant à %, on l'obtient aisément en cherchant le courant de court-circuit. Comme le condensateur est
court-circuité, on trouve :
2
0,2
%
— = „ ' .
N = —
30 + 407
3 + 4j
soit
iN = 0.04 exp{/(/>)
-N
'
avec
4
tan ô = —^
3
Un réseau linéaire entre deux de ses points A et 5 peut donc être représenté indifféremment par
un générateur de tension ou par un générateur de courant ; le passage d'une représentation à une autre
est illustrée sur la figure 5.9.
A
-N
A
Zr/i
en
Zn ©
'77;
B
Yn =
Zn
B
FlG. 5.9.
1.4. — Représentation de Thé venin et représentation de Norton
a) Représentation d'un système linéaire
D'après ce qui précède, un système linéaire peut être représenté, entre deux de ses nœuds A et B,
relativement à son extérieur, soit par une source de tension, de f.e.m ejh et d'impédance Zjh , soit par
une source de courant, de c.e.m qv = £77,/Zj/, et d'admittance Yn = l/Zj/,.
157
Théorèmes de base dans l'analyse des réseaux linéaires
On a alors les deux équations suivantes reliant la tension u entre les bornes A et B et l'intensité
i du courant de A vers B (Fig. 5.10) :
u = e-fh — 2/77, i
ou
i = tpj — Yti/M
Le choix de l'une ou l'autre de ces représentations relève uniquement de la commodité. Lorsque Zn
est faible devant les autres impédances du circuit, le modèle de Thévenin sera privilégié car les effets de
Zn seront négligeables (Fig. 5.10a). En revanche, on adoptera le modèle de Norton dans le cas inverse,
où c'est Yti, = l/Zn qui est faible devant les autres admittances du circuit (Fig. 5.10b), car ce sont les
effets de Yj/, qui seront négligeables.
A
i
A
_L
Zn
Yn
evi
'(B
B
a)
b)
Fig. 5.10.
b) Application à la simplification d'un réseau
Le passage d'une représentation à l'autre permet souvent de simplifier un réseau. C'est le cas
du montage de la figure 5.11a, lequel comporte, en régime stationnaire, deux résistances R[ et R2
alimentées par une source de tension, de f.e.m E et de résistance interne r, et par une source de
courant, de c.e.m T et de résistance R .
B
K
Rl
A
R',
I
Ri
R
I
Ri
ù
R',
R'i
R'2I
ù
E
a)
c)
b)
Fig. 5.11.
Pour déterminer l'intensité I\ du courant qui parcourt i?i , on commence par remplacer les ensembles r, R{ en série et /?, R2 en parallèle par, respectivement (Fig. 5.11b):
R\ =R[+r
et
R'2= Ri//R =
R2R
Ri A- R
Ensuite, on se ramène à une seule maille en remplaçant la source de courant par une source de tension
équivalente (Fig. 5.1 le). On en déduit ;
E-R'2I
/. =
R\ + R'2
158
5. Théorèmes de base dans l'analyse des réseaux linéaires
L'application du théorème de Thévenin entre les points A et B du montage donne évidemment le
même résultat :
/
=
—{Uab}o—
RThA-R{A-r
=
{Vab)o
RThAR\
r
= R
,,R
'
= R,
2
et
.JJ
V
,
'
= E_Xx(R2llR)
\ m
= E-XR'2
>
Exemple concret : £" = 48 V , J = 12 mA ,R\ — \ kfi. R2 = 2,2 kfl, r — 250 CL, R = 10 kli.
On trouve :
i?'l = l,25kl2
/?22
=
l-8kO
'
d'où
l — ——X
1250+ 1803
=8,6 mA
1.5. — Effet de fermeture d'un interrupteur dans un circuit linéaire
a) Fermeture d'un interrupteur
Considérons deux points + et <2 d'un réseau linéaire entre lesquels il existe, en régime stationnaire, une différence de potentiel Upq (Fig. 5.12), en raison des sources de tension ou de courant existant dans le réseau.
P
Réseau
linéaire
P
/ K
Réseau
linéaire
E=Upq
Q-
a)
P
P
E
Réseau
linéaire
K
Réseau
linéaire
E
y
b)
Fig. 5.12.
Réunissons les bornes P eî Q à celle d'un interrupteur K ouvert. La branche PKQ est donc caractérisée par la tension Upq et par un courant nul. L'état de cette branche ne change pas si l'on insère
entre P et Q une source idéale de tension, dont la f.e.m E est précisément égale à Upq , le pôle positif en P et le pôle négatif en Q.
L'effet de fermeture de K revient à ajouter, en série avec la source idéale de tension précédente, une
seconde source de tension identique mais en opposition. La différence de potentiel entre les deux points
est alors nulle, comme lorsqu'on ferme K.
Ainsi, la fermeture d'un interrupteur est équivalente à l'adjonction, au réseau comportant l'interrupteur ouvert K, aux bornes duquel la tension est Upq , d'une source de tension idéale en opposition
avec Upq .
Ce résultat se généralise aux signaux variables dans l'approximation des régimes quasi stationnâmes.
159
Théorèmes de base dans l'analyse des réseaux linéaires
b) Application à la mesure de la résistance interne d'une pile par la méthode de Mance
Considérons le pont représenté sur la figure 5.13a dans lequel les résistances
et Rj sont
connues avec précision, Rv est une résistance variable, E est la f.e.m de la pile et R-, sa résistance
interne. On réalise l'équilibre du pont, entre les points -4 et S, en cherchant la valeur de Rv qui annule le courant dans la branche AB. Désignons par Upq la tension aux bornes de l'interrupteur et insérons une source de tension idéale de f.e.m Ek = f/pg . Un tel système est équivalent au pont, avec K
ouvert.
P e
P e
i
/ ><
A
Ri
(a)
Q =
2K
P
p}
ô
Ri
^2
+
A
P
Ri
K
b)
FIG. 5.13.
D'après le théorème de superposition, un tel montage peut être considéré comme la superposition
de deux montages :
i) dans le premier (Fig. 5.13b), on maintient la pile et on passive la tension idéale en connectant
directement les points P et Q. Ce montage est équivalent au montage initial avec interrupteur fermé.
L'intensité du courant qui circule dans la branche AB est
.
ii) Dans le second (Fig. 5.13c), on maintient la tension idéale Ek et on passive la pile en la remplaçant par sa seule résistance interne. Ce montage est équivalent à un pont de Wheatstone. L'intensité
du courant qui circule dans la branche AB est
. On sait qu'elle est nulle lorsque le pont est équilibré, c'est-à-dire lorsque :
R
i
Ri
Ri
Rv
On en déduit que l'intensité / est égale à
,, .
d ou
Ri = Rv^Ri
, que l'interrupteur soit ouvert ou fermé.
Une telle détermination de la résistance interne d'une pile, insérée dans l'une des branches d'un
pont de Wheatstone équilibré (dans la branche AB ), avec un interrupteur K dans la branche PQ, est
connue sous le nom de méthode de Mance .
Application : P| = P3 = 2 kO et Rv = 14,5 fi ; on trouve P, = 14,5 fi.
c) Extension au régime quasi stationnaire
Le résultat précédent s'étend sans précaution particulière aux circuits variables dans l'approximation des régimes quasi stationnaires. Par exemple, considérons le circuit de la figure 5.14a dans lequel,
lorsque l'interrupteur K est ouvert (Fig. 5.14b), on mesure entre les points P et Q une tension efficace Upq = 12 V , en présence des sources de tension, de f.e.m efficaces Pi et £2 inconnues, mais
avec les valeurs d'impédances données sur la figure.
160
5. Théorèmes de base dans l'analyse des réseaux linéaires
24 ù
24 il
K
12 V
48 n
£
Q
E2
48 il
c
70 n
^
70 i>.
B
B
a)
b)
FlG. 5.14.
On se propose de déterminer la variation de la tension entre les bornes A et B de la bobine,
lorsqu'on ferme l'interrupteur.
Pour cela, ajoutons entre P et Q une source de tension de f.e.m 12 V , mais en opposition avec la
tension avant fermeture de K .La variation de tension recherchée est obtenue en calculant l'intensité du
courant que fait circuler cette nouvelle source de tension, lorsqu'on passive le circuit initial. On trouve
aisément cette intensité en appliquant le théorème de Thévenin. Il vient :
[r + jLù))i
La tension complexe
= -12\/2
où
{Hab)"
r + JLoj + Zrh
i
est, en choisissant r = 14 fi et Lco = 20 fi (Fig. 5.14b) :
2
24
*4Si cos{ù)t) = -4V2cos{(ot)
d'où
i= -
1Qq
^2Q cos(^)
Quant à l'impédance interne Zjy,, elle vaut, puisque le condensateur est court-circuité :
ZTh
70
24x48
24 + 48
86 fi
On en déduit la surtension mesurée lorsqu'on ferme K :
4+2
= —(14 + /20)y ——
— cos(wr)
^
100+j20
" '
dont la valeur efficace est :
At/AB
4
14+720
100+720
1/2
53
-4(
)
[104)
= 2, 85 V
II. — CAS DES SOURCES COMMANDEES
Jusqu'à maintenant les sources de tension ou de courant considérées étaient indépendantes. Or les
composants actifs, tels que les transistors sont représentés par des schémas électroniques dans lesquels
des sources de tension ou de courant ont des caractéristiques qui, elles, dépendent des autres paramètres
du réseau. Par exemple, sur le montage de la figure 5.15, représentant un transistor (cf. chapitre 7), le
c.e.m de la source de courant dans la deuxième maille est proportionnel à l'intensité £, dans la première ;
il s'écrit précisément : i.2 — 13 i\ .
Lorsqu'on applique les théorèmes de Thévenin ou de Norton, la détermination de ej^ , qui est la
tension entre les points A et S d'une branche ouverte, ne pose pas de problème particulier.
Théorèmes de base dans l'analyse des réseaux linéaires
161
-[
A
/?!
Ud
Ri
012
B
FIG. 5.15.
En revanche, celle de Zm par la passivation des sources d'un réseau, qui consiste à court-circuiter une
source de tension et à « coupe-circuiter » une source de courant, ne peut plus convenir. En effet, la suppression d'une f.e.m indépendante dans une branche impliquerait automatiquement celle de l'intensité i
dans une autre branche, ce qui reviendrait à annuler la f.e.m commandée. On évite cette difficulté en utilisant les deux méthodes suivantes de détermination de l'impédance de Thévenin, moins simples mais
valables, elles, dans tous les cas.
II. 1. — Détermination de Pimpédance de Thévenin
En présence de sources commandées, on peut déterminer l'impédance de Thévenin du réseau entre
les points A et fi, de deux façons différentes plus ou moins commodes, selon la nature du réseau
considéré.
a) Méthode du courant de court-circuit
Le courant de court-circuit entre les points A et fi est, comme on le sait, le courant qui parcourt
la branche Afi lorsqu'on court-circuite ces deux points par un simple fil de connexion. En régime quasi
stationnaire sinusoïdal, le rapport de la f.e.m de Thévenin eTh sur son intensité icc donne précisément
l'impédance interne (Fig. 5.16) :
y
Ç-Tk
^Th — —
'
■a
o
c
a
û
(M
1—1
O
CNI
©
ai
a.
o
(J
R
Ih
A
e
Th
FIG. 5.16.
FIG. 5.17.
Exemple : déterminons la f.e.m de Thévenin entre les points A et fi du circuit, représenté sur la figure
5.17, dans lequel les éléments passifs sont des résistors ; le c.e.m de la source de courant est commandé
par l'intensité i de courant qui parcourt la résistance R\ . La branche Afi étant ouverte, on trouve
aisément que e-fh = ^ • Quant au courant de court-circuit, il a pour expression, avec les notations de la
figure :
icc - i(l + «)
avec i est tel que e — R\i
e = lr
Ro
Rih . Il en résulte :
fii
a
d'OÙ
Lr =
e(l + «0
fi2 + fii/(l+«)
fi2(l + cr)+fi|
162
5. Théorèmes de base dans l'analyse des réseaux linéaires
On en déduit la résistance de Thévenin :
n _eTh _
Kn — — —R
rCl
Te
R\
1 +«
b) Méthode du générateur auxiliaire
Neutralisons les f.e.m indépendantes et connectons un générateur de f.e.m eg entre les points A
et 5. Si l'intensité du courant débité par le générateur est L , l'impédance de Thévenin est (Fig. 5.18) :
Zn = %
k
Th
en
Fig. 5.18.
Exemple : reprenons le circuit de la figure 5.17. Le courant i
satisfait aux deux équations suivantes
[g = -(1 + oi)i
avec z tel que eo = R2Lo — R\ î- H en résulte :
Ri .
e — R2 Ls + t-:— L
1 + rr ^
„ v
^ 011
Zw —
+
Ri
1 +a
Remarques : 1) On retrouve évidemment l'intensité zcc en résolvant le circuit simple considéré, avec
A et B reliés par un fil de connexion. En effet, on a alors :
R
icc — (1 + odji
et
£ = /?iz + /?2 icc = Ri icc
\ .
' 1 + a ïcc
r .
a011
•
_
^
~/?2+ /?,/(!+«;
?cc
2) La méthode de passivation de toutes les sources, ici inadaptée, aurait donné pour Z77,,
les résistances étant en série : ZTh = R\ -\- Ri et donc icc = e/{R\ + Ri) comme valeur
de l'intensité, ce qui est inexact.
II. 2. — Applications
a) Générateur de Thévenin associé à un transistor
La figure 5.19a représente le schéma équivalent simplifié d'un transistor. La f.e.m du générateur
équivalent de Thévenin, que Ton obtient en l'absence de branche AB extérieure, a pour expression :
Zip
Çn = -ZiPlb
avec
ib = ^
-M
d'où
eTh =
z,
u,
Théorèmes de base dans l'analyse des réseaux linéaires
163
Quant à l'impédance Zn , on la trouve en déterminant l'intensité du courant de court-circuit. Pour cela,
on relie les bornes A et S par un simple fil de connexion (Fig. 5.19b). Il vient :
Le = -PL = -fiTr
Z
l
d'où
zTh = — = Zj
lec
Ordres de grandeur : avec le transistor bipolaire NPN 2N2219, pour lequel :
/3 = 180
Z2 = 5 kfi
Z\ = 2,5 kO
et
ue = 25 mV
on trouve :
e-ru = —360 m. = — 9 V
vr/î
"
et
-r-c
l
b
z.
Zn, = 5 kll
l
b
A
Z,
Z2
Z2
8
b)
FIG. 5.19.
b) Générateur de Thévenîn associé à un réseau avec bobines couplées
Un exemple de circuit à sources commandées est fourni par le couplage de deux bobines (cf.
chapitre 11). Proposons-nous de déterminer les caractéristiques du générateur de Thévenin entre les
points A et 5 du réseau représenté sur la figure 5.20.
/,
L\, ri
2 \ Li.n
l
v
ei
Zi
A
/
>
1
2
|
I
B
FIG. 5.20.
Dans la maille 1 (respectivement 2 ) apparaît une f.e.m supplémentaire proportionnelle à la variation de l'intensité du courant qui circule dans le circuit 2 (respectivement 1 ) et au coefficient d'inductance mutuelle M, lequel est positif ou négatif selon le sens des enroulements (cf. Elecîromagnéîisme).
Les deux équations du réseau s'écrivent donc :
e
\ — nO + Li
+ M+ Z| (q — 12)
et
^z2'2
0 — r2i2 +
—
Z\ (q — ij)
ce qui donne, en régime sinusoïdal et en notation complexe :
^1 = (r\ EjLxCû)^ -\- jMù)i2 + Zi(f, - i2)
et
0 = (^ +
La résolution laborieuse de ces équations fournit l'intensité ^
+jM(oi_x + Zi^ - Zi(f, - i2]
et
donc la f.e.m de Thévenin selon :
164
5. Théorèmes de base dans l'analyse des réseaux linéaires
On trouve Zti, en déterminant icc , lequel s'identifie k [2 si Z2 = 0 :
ei = (n +JLiù))il +jM^4c + Z, (z, - 4C)
et
0 = (r2
+JMûjij - Z, ([, - i^)
Exemple : plaçons-nous dans le cas concret où la pulsation est telle que :
L, w = Lo w = 5 O
En outre, r\ = r2 ~ 0 et
Mù) = -4 H
Zj = (3 — 4/) O
et
Z2 = 5 fi
= 10 V . Le système numérique à résoudre est alors le suivant :
ô,m(3 + j) — 3*2,m — 10
3zi;r„ — (8 -\-j)i2,m — 0
On trouve :
l2,m —
Pour déterminer le courant
14 -f 1 ij
Ct
CT-;, ,,, —
-Th'm
14 +1 y
, il faut résoudre le nouveau système :
ô,m{3 +7) -
= 10
3zj,ni - (3 +7)icc:m =
0
On obtient :
150
^ - ^TTÔj
et
Zr
w
-I + 67 _
-1 +67
X
_
^ 14 + 11/
14 + 117
"-/,
30
Ainsi, le générateur équivalent de Thévenin est caractérisé par :
^«=<^^'=(^2-75,2^
et
Zr/i = 5I^_| = (0,8+7 1,5) fi
III. __ analyse des reseaux
Analyser un réseau, c'est-à-dire un circuit comprenant un nombre suffisant de mailles, c'est mettre
en œuvre une méthode qui permet de connaître son état électrique, présent et futur.
III. 1. — Variables d'état d'un réseau électrique
a) Inconnues du réseau
Considérons un réseau tel que celui représenté sur la figure 5.21, lequel est un pont de Wheatstone
modifié, qui comporte six branches (b = 6 ), contenant chacune un résister, et quatre nœuds N\,./V2, A3
et A4 (n — 4).
La connaissance des intensités des courants, dans les h branches du réseau, détermine l'état électrique du réseau, puisque les tensions entre deux points quelconques du réseau s'en déduisent, en appliquant les relations entre courant et tension aux bornes de chaque dipôle.
En fixant arbitrairement un potentiel de référence, origine des tensions dans le circuit, que l'on
appelle la masse, le nombre total Af de variables inconnues du réseau est la somme des b intensités
iki des courants qui circulent dans les branches A/CA/, délimitées par les nœuds
et Nj, et des n — \
tensions de nœud :
Nt = b + n-\
Le circuit de la figure 5.21 comporte Af = 6 + 4—1 = 9 variables inconnues, 6 courants et 3
potentiels de nœud.
165
Théorèmes de base dans l'analyse des réseaux linéaires
x
i\ N2
~ i
Rs
R3
n4
Rs
! 3"
FIG. 5.21.
b) Variables d'état
Les h variables d'intensité du réseau ne sont pas indépendantes, car elles sont reliées entre elles
par les lois de Kirchhoff relatives aux nœuds et aux mailles.
Appliquée aux n nœuds du circuit, la loi des nœuds fournit n équations, dont seulement n — \
sont indépendantes. En effet, aux deux extrémités d'une même branche N^Ni, le courant 4/ converge
en Ni et diverge de A4 . Par conséquent, en considérant les courants externes à cette branche, au nombre
de j au nœud A4 et de / au nœud Ni, la loi des nœuds en ces points s'écrit, respectivement :
j
f
ikl "F ^ ^ ~mhn
w=\
=
0
Ct
4/ "F ^ ^ Xw'm — 0
m=\
où £m traduit l'orientation des courants im . La somme, membre à membre, des n équations de nœuds,
donne l'égalité 0 = 0, puisque chaque courant apparaît deux fois avec des signes opposés, ce qui retire
une équation au décompte initial.
Ainsi, le nombre Ne de variables indépendantes d'un circuit électrique, appelés variables d'état,
qui déterminent toutes les autres grandeurs électriques, est relié aux h branches et n nœuds du système
par la relation :
Ne = b — {n — })= b — n + ^
Dans le réseau de la figure 5.21 le nombre de variables d'état est donc : A4 = 6 — 4+1=3.
III. 2. — Analyse des réseaux linéaires
a) Réseaux linéaires
Dans les circuits linéaires, qui sont constitués uniquement de dipôles linéaires et de générateurs de
tension ou de courant, les relations courant-tension aux bornes des dipôles du circuit se réduisent à des
relations affines, en présence de f.e.m ou de c.e.m, ou à des relations de proportionnalité :
i) entre grandeurs stationnaires en régime établi, {U — RI) -,
ii) entre grandeurs complexes en régime sinusoïdal forcé dans l'ARQS ( u — Zi),
iii) entre les transformées de Laplace des courants et des tensions, en régime variable quelconque
dans l'ARQS ( TL{u} = Z(p) TL{ï} ).
Dans ces conditions, les équations issues des lois de Kirchhoff deviennent des combinaisons linéaires des grandeurs inconnues. Le formalisme matriciel est alors particulièrement adapté au traitement des réseaux linéaires.
166
5. Théorèmes de base dans l'analyse des réseaux linéaires
b) Méthodes d'analyse
Les méthodes d'analyse des réseaux visent soit à trouver l'ensemble des b courants de branche,
soit à connaître l'ensemble des n — 1 potentiels de nœud ; les grandeurs inconnues restantes, tensions
de nœud ou courants de branche, se déduisent évidemment des relations tension-courant aux bornes des
dipôles du circuit.
Il existe principalement trois méthodes d'analyse équivalentes qui, par des écritures spécifiques des
lois de Kirchhoff, permettent d'obtenir toutes les grandeurs électriques d'un réseau :
i) l'analyse par les courants de branche, qui cherche à accéder aux b intensités des courants dans
les branches du circuit,
ii) l'analyse par les tensions de nœud qui conduit à déterminer les n — 1 tensions de nœud, un
nœud étant choisi comme référence des tensions,
iii) l'analyse par les courants de maille qui, en introduisant Ne = b — n + 1 courants fictifs
indépendants, de maille, permet d'accéder aux courants dans les branches du circuit.
Nous nous proposons dans la suite de mettre concrètement en œuvre ces méthodes sur l'exemple de
la figure 5.21, avec les valeurs suivantes des caractéristiques des composants :
= 1 kfl, R] = l kfi,
r2 = 10 kO,
= 10 kfi, /?4 = 10 kfi ,^5 = 1 kfi, £î = 5 V, £3 = 12 V, la = 10 mA et
R2J2 = 100 V .
Notons que les sources, réelles, sont représentées par un générateur de tension ou de courant avec
sa résistance interne.
III. 3. — Méthode des courants de branche
Pour déterminer les intensités des h courants de branche, on exprime d'abord les n — 1 relations
indépendantes issues de la loi des nœuds, écrites en fonction des courants de branche. On complète
ensuite le système d'équations par b — n -\- \ relations, issues de la loi des tensions appliquée à un
même nombre de mailles dans le circuit. Afin que les équations obtenues ne soient pas redondantes, le
choix des mailles doit inclure toutes les branches qui comportent des sources, ces dernières ne pouvant
évidemment pas être sans effet sur le réseau.
(NI
(3)
£
"l-
Notons qu'il est impossible d'appliquer la loi des tensions à une branche du circuit constituée d'une
source parfaite de courant, puisque la tension à ses bornes dépend du reste du circuit. En revanche, le
courant dans la branche est connu, ce qui réduit d'une inconnue le système d'équations. Il suffit donc
de choisir b — n mailles qui ne comportent pas cette source de courant pour compléter le système
d'équations (cf. Exercices).
a) Mise en équations
La loi des nœuds, en iVi , A? et A4 par exemple, donne trois ( n — l = 3), équations indépendantes :
—il + h + i6 = 0 en N\
il + h + /s
=
0
en
N2
h + U + *5
=
0
en
A4
Appliquons alors la loi des tensions dans trois (h-n-yi = 3), mailles choisies parmi les sept que
compte le réseau. Les mailles A1A2A3/M , A1A2A4 et A2A3A4 conviennent puisqu'elles englobent
167
Théorèmes de base dans l'analyse des réseaux linéaires
toutes les sources. En veillant à Torientation algébrique des courants, on trouve :
E[ ~ R]i] + Riih ~ Zi) + £3 — Rek
=
0
E\ —R[i\ 'E R5I5 —£3'3
—
0
Rii}! ~ Tô) + £4/4 — £5/5
—
0
ce qui donne, en séparant les termes de source :
R{i\ — Rih + Reie
=
E\ + £3 — R-iT-i
R\i\ + R3I3 ~ Rsis
=
E\
Rih + Râ,U — Rsh
—
R%Ei
Le système linéaire précédent, constitué par les six équations de branche, peut ainsi se mettre sous la
forme matricielle :
[Z]['l = [5]
dans laquelle [/] est le vecteur colonne des courants de branche, [S] le vecteur colonne des sources et
[Z] la matrice impédance. Cette équation s'explicite selon :
-1
1
0
R\
Ri
0
0
l
0
-Ri
0
Ri
1
0
1
0
0
0
1
0
0
1
1
0
£3
0
0
£4
-Rs
-Rs
0
0
0
i\
h
h
U
is
£1 +£3 £1
R2Z2
A
b) Résolution du système
Les méthodes de résolution du système d'équations linéaires précédent sont nombreuses. En pratique, il est efficace d'utiliser une calculatrice scientifique, ou mieux un logiciel de calcul qui inverse la
matrice des impédances et donne :
[^[zr'is]
On trouve les valeurs suivantes des intensités en mA :
i[ se —4,38
*2 ^ 7,36
13 se 0,64
?4 se 2, 34
-2,98
-5,02
III. 4. — Méthode des tensions de nœud
Une fois choisi le nœud de référence, on détermine les valeurs des n — 1 tensions de nœud, en
exprimant les n — 1 relations issues de la loi des nœuds en fonction des tensions de nœud.
a) Mise en équation
Choisissons l'origine des potentiels en N] .La loi des nœuds en N2 , A? et
Yl[Et~U2) + Y5{Ui~U2) + Y1(U^U2)+X2
=
0
Y4{U4-U3)~Y2{U3~U2)~l2-Y6{U3 + E3)
=
0
F3{C/4-0) + 75(£/4-f/2) + F4(f/4-£/3)
=
0
ce qui s'écrit aussi, en séparant les termes de source :
(Fl+y2 + y5)C/2-JW3-î'5£/4
=
lî + FlO
-Y2U2 1 {Y2 \ v.i + Y^)U3 — Y4u4
—
—X2 — y
-yst/î-ya^ + fFs + ya + ys)^
=
o
donne :
168
5. Théorèmes de base dans l'analyse des réseaux linéaires
s
b) Ecriture matricielle
Le système linéaire constitué par ces trois équations peut se mettre sous forme matricielle :
IY][U] = [S]
dans laquelle [£/] est le vecteur colonne des tensions de nœud, [,5] le vecteur colonne des sources et
[Y] la matrice admittance :
-y| + y2
+
y5
Y2
-Y5
_y2
_y5
L2 + 74 + L6
-74
ir^l
F X2 + YyE]
-74
f/3 = -l2-Y6E3
0
73 + 74 + 75J L^J
[
Comme la matrice des admittances est simple et symétrique, cette méthode est remarquablement
efficace. Notons les points suivants :
i) un élément diagonal 7^ de la matrice des admittances est la somme des admittances reliées au
nœud
,
ii) l'élément non diagonal 7/c/ est égal à l'admittance de la branche N^Ni changée de signe,
iii) la ligne k du vecteur colonne des sources est la somme des c.e.m qui aboutissent au nœud
Nk , avec la convention habituelle consistant à compter positivement les courants dirigés vers le nœud et
négativement les courants qui en sortent.
Remarque : Si une branche comporte un générateur de Thévenin, il est nécessaire de convertir ce
dernier en son générateur de Norton équivalent.
c) Résolution du système
La résolution numérique donne : f/2 ^ 9,38 V , F/s ^ —17,02 V et t/4 ry 6,40 V . On déduit
l'intensité des courants de branche à l'aide des relations courant-tension dans chaque branche :
il =
K]
~ —4,38 m A
z2 = J2 +
_ U4—f/s ^
« 7,36 m A
/\2
^^ —2,98 m A
7?4
R5
*3 —
iç, =
'
Rq
~i 0,64 mA
inA
« —5.02 m A
-5,02 mA
III. 5. — Méthode des courants de maille
Cette méthode consiste à effectuer, directement sur le circuit, un changement de variables, en introduisant Ne variables d'état, homogènes à des intensités, appelées courants de maille. Ces derniers,
qui ne correspondent à aucun courant réel, sont construits en choisissant Ne mailles, parcoumes par ces
courants de maille d'intensité im^ .
L'application de la loi des mailles aux branches communes de deux mailles adjacentes, permet de
calculer les courants de maille. Aussi cette méthode est-elle dite des mailles adjacentes.
Enfin, avec le théorème de superposition, on relie les courants de maille aux courants de branche.
a) Mise en équation
Les mailles choisies sont représentées sur la figure 5.22. La loi des tensions, appliquée aux mailles
/VjAAA/j, N2N2N4 et NiNiN^BA parcourues respectivement par les courants de maille /mj , èn,2 et
.30
s
1
im,3 , donne :
hn,l) F R3 (^»,3
i/n, 1 )
-
0
Ejiim,! + Zj) 'F ^4 ('m,3 " Ci,2) -F R5 {hn, 1
Imy)
=
0
*m,3)
=
0
F Rs (hn,2
E3
Rèhn.S F R3 (h?;, 1
_
*111,3) ~F R4(hn,!
Théorèmes de base dans l'analyse des réseaux linéaires
169
ce qui s'écrit, en séparant les termes de source :
{Ri + /?3 + Rs) inifi — Rsim,! — ^3im,3
=
—
^5^,1 + (^2 +
=
—RT^l
—
—
=
^3
+ ^5) 'm,2 —
+ {^3 + -^4 +
Notons sur la figure 5.22 que q — im,\ ■> I2 —
et z<5 = ZW)3 .
hi,3
'm,2 ? '3 — 'm, 1
^1
7V2
'j«,3 » ^4 — im,3
hn,2 » '5 — hn,2
,
J#
^2
1.
'
Ni
1
13
)
>3
16
/?6
12
4 2
i?4
^
N3
4 3 :
A
B
£3
Fie. 5.22.
b) Écriture matricielle
Le système linéaire précédent peut aussi se mettre sous la forme matricielle [Z] [zm] — [5], dans
laquelle [im\ est le vecteur colonne des courants de maille, [5] le vecteur colonne des sources et [Z] la
matrice des impédances. En explicitant, on obtient :
1 + i?3 + /?5
—/?5
—R3
—i?5
/?2 + /?4 + R5
~R4
—i?3
—R4
i?3 + /?4 + Rf,
hn, 1
hn,2
*m,3_
=
Ei
—R2T2
E3
La forme des matrices obtenues est ici aussi remarquablement simple. Notons les points suivants :
i) l'élément diagonal Z^ de la matrice des impédances est la somme des impédances de la
maille k,
ii) l'élément non diagonal
est égal à l'impédance de la branche commune aux mailles JA^
et
Mi, affectée d'un signe positif si les courants des deux mailles parcourent la branche dans le même
sens, et négatif dans le cas contraire ;
iii) la ligne k du vecteur colonne des sources est la somme des Le.m de la maille M^, affectées
d'un signe positif si le courant de maille z'^Jc sort par la borne positive, d'un signe négatif dans le cas
contraire. Notons alors que, si une branche comporte un générateur de Norton, il devient nécessaire de
le convertir en son générateur de Thévenin équivalent.
c) Résolution du système
La résolution numérique donne les intensités suivantes des courants de maille :
im,i = —4, 38 mA
z,„;2 = —7,36 mA
ilt,^ = —5.02 mA
170
5. Théorèmes de base dans l'analyse des réseaux linéaires
On en déduit, à l'aide du théorème de superposition, les courants de branche selon :
h = imj = -4, 38 mA
U = int ,3 - ht.2 = 2. 34 m A
A = -hn,2 = 7,36 mA
i5 = im,\ -
i3 = zmj - im)3 = 0,64 m A
= -2, 98 mA
k = 'm,3 = -5,02 mA
III. 6. — Comparaison des méthodes d'analyse des réseaux
L'analyse par les courants de branche a l'avantage de conduire directement à la détermination de
tous ces courants, mais au prix d'une résolution d'un système d'ordre élevé {h — 6). L'utilisation des
tensions de nœud ou des courants de maille présente, elle, l'avantage d'introduire un nombre plus faible
d'inconnues indépendantes {h — n h 1 = 3 ) ; les courants de branche sont alors calculés en combinant
les tensions de nœud ou les courants de mailles obtenus.
IY. — UTILISATION DE LA TRANSFORMEE DE LAPLACE
En appliquant les propriétés de la transfonnée de Laplace (cf. annexe 3) aux équations définissant les relations tension-courant des dipôles passifs, résistor, condensateur et bobine, s'introduisent naturellement les impédances symboliques de ces composants, avec lesquelles les théorèmes précédents
d'analyse des circuits s'appliquent sans modification essentielle.
IV. 1. — Impédance symbolique d'un résister
La relation uR = IUr , entre la tension ur aux bornes du dipôle et l'intensité Ir du courant qui le
traverse, donne, en prenant la transformée de Laplace des deux membres :
t/fiW = Rh(p)
d'où
zR(p) =
Ir\P)
= R
IV. 2. — Impédance symbolique d'un condensateur
De la même manière, la valeur de l'impédance symbolique Zc{p) d'un condensateur de capacité
C, s'obtient à partir de la relation entre la tension lie et l'intensité ic du courant qui la traverse. On
sait que l'on a :
uc{t) - uc{0) = — [ icit^àr'
^ Jo
Or la transformation de Laplace d'une fonction
(cf. annexe 3) :
est reliée à celle de sa dérivée g{t) par l'équation
TL{jAt)} = ^ + ~-
avec
G(p) = TL^f)}
ce qui donne dans l'exemple d'un condensateur, de charge initiale (à r = 0) Cwc(0) :
u
c{p) = ^7^ +
hp
p
ou
Icip) = CpUc(p) - Cmc(0)
En introduisant l'impédance symbolique du condensateur :
= z-
171
Théorèmes de base dans l'analyse des réseaux linéaires
les relations précédentes deviennent respectivement :
Uc{p) — Zplcip) +
wc(0)
et
Ic{p) = CpUcip) - Cmc(O)
P
Sur la figure 5.23a on a dessiné le schéma symbolique équivalent du condensateur, avec la condition
initiale uc{Q)/p représenté par un générateur en série dont la tension indicielle correspondante s'écrit
uc{0) Y(f) . En b, le schéma s'appuie sur la deuxième équation ; la condition initiale Cmc(O) est traduite
par un générateur de courant impulsionnel d'expression Cuc{0) 8(t) (cf. annexe 2).
l/Cp
l/Cp
u
c{0)/p
Ic(p)
lc(p)
Cuc{0)
(D-
Uc(p)
Vcip)
b)
a)
Fie. 5.23.
Remarque : On peut vérifier l'homogénéité des équations précédentes en notant que p a la dimension
de l'inverse d'une durée, U{p) celle du produit d'une tension par une durée et/(/?) celle
du produit d'un courant par une durée, c'est-à-dire d'une charge.
IV. 3. — Impédance symbolique d'une bobine
On sait que la relation entre la tension ni aux bornes d'une bobine, d'inductance L, et l'intensité
il du courant qui la traverse s'écrit :
, diL
UL
=
L
d7
Comme la TL d'une fonction est reliée à celle de sa dérivée par l'équation (cf. annexe 3) :
TL
{ ~d^ }
=
^
aVeC
~
= TL
{gW }
Il vient, en prenant la TL de l'équation de départ :
UL{p) = L[plL(j?) - ?L(0)] = LpfL(p) - LiL(0)
ou
IL{p) =
Lp
+ l^l
p
En introduisant l'impédance symbolique Zi(p) d'une bobine :
Zl(p) = Lp
les équations précédentes s'écrivent :
Ul{p) = ZL{p)IL{p) - Lil{0)
et
IL{p) =
Zlip)
p
On en déduit deux représentations de la bobine : sur la figure 5.24a, on prend en compte le courant initial
en introduisant un générateur de tension impulsionnel, de f.e.m —Lii{0) ô{t) ; en b, on représente ce
courant par un générateur de courant indiciel de c.e.m ïl(0) Y (?).
172
5. Théorèmes de base dans l'analyse des réseaux linéaires
h{p)
Lzl(O)
h(p)
Lp
■mm-
<Xh^(0)
Vdp)
Vdp)
b)
a)
FlG. 5.24.
IV. 4. — Application au filtre passe-bas RC
On sait que l'équation différentielle linéaire et du premier ordre, à laquelle satisfont de nombreux
systèmes électroniques, dont le filtre passe-bas type RC de la figure 5.25 (cf. chapitre 4), se met sous la
forme :
ds{t)
, ,
, ,
tc ^ + s(t) = e(t) avec rr = RC
En prenant la transformation de Laplace des deux membres de cette équation différentielle, on obtient,
avec les notations habituelles :
Te [pS{p) - .v(0)] + 5(p) = E{p)
E{p)
Uo
S{p) = —
+
1 + pTc
PTr
p-\-\/Tc
soit
où
Uq = s(0)
représente l'influence de la charge initiale du condensateur.
R
R
e(f)
C
s(/)
Cp
R(p)
s(p)
Uc,0
p
FIG. 5.25.
Fig. 5.26.
Remarque : On retrouve ce dernier résultat en remplaçant la résistance et le condensateur par leurs
impédances symboliques. Le circuit de la figure 5.25 se transforme selon la figure 5.26, où
la tension {/qY(r) traduit la charge initiale du condensateur. En effet, avec des diviseurs
des tensions E{p) et t/o(p), on obtient :
s{p)
i/(cw
m
R+l/[Cp)
Uo
R
p R+l/{Cp)
soit
S{p)
E{p)
|
Uo
puisque tc = RC.
a) Réponse transitoire à un échelon de tension
À un signal d'entrée, de type échelon de tension e(t) = eniY{t), le circuit donne la réponse suivante :
p/ \
,
Uo
.
em
r/ s
S( ? =
J)
"7
/ c puisque E{p) = —
p{pTc +Tn
1) + p +. i1/t
p
Théorèmes de base dans l'analyse des réseaux linéaires
173
Il vient en décomposant S(p) en éléments simples :
B
S( ) = (dl (-+
\
Te \P
p + l/Tc)
rA(p+ 1/tc) + Bp
tc [
p{p + 1/tc)
p -y \/rc
ç( ) —
Tc [
P(A + ^) + A/rr
p0+ 1/tc) \
P+Ï/Tc
p -y l/rc
On obtient, par identification, A = —B = tc , et donc :
S(p) = em
fl
\p
1
u
\ ,
o
——— + —
p-yl/TcJ
p + l,
on en déduit le signal s{t) pour / > 0 , en prenant la TL inverse (cf. annexe 3) :
s{t) - em
l - exp
+ f/o exp ^ ^r
h) Réponse transitoire à un signal sinusoïdal
Appliquons à l'entrée du système défini par la fonction de transfert H(jco), à un instant pris comme
origine, un signal sinusoïdal e{t) = em cos(<ur). Cherchons à déterminer le signal de sortie correspondant. Il vient, en utilisant les résultats précédents ;
Cm
P
c/ \
S{iv = —1——TT v 72 ,—st
+
, , ,
Tc [P + 1 Tc){p + a>2)
p + l/rc
jr,/ \
P
E(/7 = em——y
p- + co2
puisque
ce qui s'écrit aussi :
ç/ \
e
=
jy(
A
BpjyC\
2
Tc\P+i/Tc
Up
2
p + (x) )
P+1/Tf
On détermine les trois coefficients A , S et C en réduisant au même dénominateur et en identifiant :
Bp + C _ A (p2 + to2) + {Bp -y C)(p + 1/tc)
A
p -h 1 /rc
p2 + m2
(p + 1 /rc) (p2 + co2)
soit :
,
=
(A + g)p2 + Aco1 + CItc -y p(C + B/tç)
Uq
(p+l/Tc)(p2 + ^
P+1/tc
KP)
On en déduit :
A+5—0
Aù)~ H
—0
Tr
et
C -f- — — 0
rr
d'où :
A = —B = —
^+
C
=
C
f7i2+lN)=1
61
C
= 1 + (û2T]
Finalement, en exprimant A et S en fonction du seul facteur C qui ne dépend que de {tor^)2, on
obtient :
û>2T2 V
p+l/rc
p2 + (02J
p + l/Tc
ce qui se simplifie selon :
1 + ùj2t2 \ p + 1/tc
p+
p2 + co2 J
p + 1/r
174
5. Théorèmes de base dans l'analyse des réseaux linéaires
Il vient alors, en revenant au signal s{t) (cf. annexe 3) :
1 + (O
^ cos(^r) + (yrcsin(wf) — exp
+ f^oexp
~
En faisant tendre t vers l'infini, on restitue évidemment le régime établi, (cf. chapitre 4) :
s{t} =
1 + co2T^
cos(£a/) + ù)tc sin
On voit que le calcul opérationnel permet d'obtenir globalement la réponse complète du circuit, en
régime transitoire et en régime établi.
CONCLUSION
Rappelons les résultats essentiels que sont les théorèmes de superposition, de Thévenin et de Norton, ainsi que les méthodes d'analyse des réseaux linéaires.
1) Le courant produit dans une branche par un ensemble de générateurs est la somme des courants
produits par chacun d'eux, les autres étant remplacés par des courts-circuits pour les sources de tension
et par des coupe-circuit pour les sources de courant.
2) Selon le théorème de Thévenin, le courant dans une branche a pour expression, en régime stationnaire
ou quasi stationnaire :
. _ (ijUgX'
Zn + Z
dans lequel Zj/, est l'impédance du système initial, mesurée entre les points A Qi B, une fois les
générateurs passivés.
3) Selon le théorème de Norton, on a en régime stationnaire ou quasi stationnaire :
avec
YTH + Y
LN = icc = {uAB)0 Yth
et
Yn =
dans laquelle Y est l'admittance du dipôle de connexion et Yn 1 admittance du système initial passivé,
entre les nœuds A et B .
4) La fermeture d'un interrupteur dans un circuit linéaire est équivalente à l'adjonction, dans la branche
comportant l'interrupteur ouvert K aux bornes duquel la tension est Upq , d'une source de tension
idéale en opposition avec Upq .
5) Avec des sources commandées, les théorèmes de Thévenin et Norton sont toujours valables pourvu
que les systèmes soient linéaires. Cependant la méthode de détermination de l'impédance de Thévenin
par passivation des sources ne convient plus ; on doit lui substituer soit la méthode du courant de courtcircuit, soit celle du générateur auxiliaire :
7 — -—
-Th
7.77,
nu
OU
7 —
- —
~g
7.r/i
6) Concernant la détennination de l'état électrique d'un réseau, l'analyse est conduite à l'aide de trois
méthodes qui s'appuient largement sur l'efficacité du calcul matriciel.
175
Théorèmes de base dans l'analyse des réseaux linéaires
EXERCICES ET PROBLEMES
P5-1. Théorème de superposition
Le circuit de la figure 5.27 comporte deux sources de tension, de f.e.m respectives E\ = 12 V ,
£2 = 24 V, et une source de courant de c.e.m X = 10 m A .
1. a) Calculer l'intensité
du courant qui parcourt la branche AB, de résistance R, lorsque
seule la source de f.e.m £1 est activée.
b) Même question pour l'intensité /(^, du courant qui parcourt la branche AB, lorsque seule la
source de f.e.m £2 est activée.
c) Même question pour l'intensité /X) du courant qui parcourt la branche AB, lorsque seule la
source de c.e.m X est activée.
2. En déduire l'intensité du courant qui parcourt la branche lorsque les trois sources sont activées.
Trouver sa valeur sachant que R = l kll.
3. Retrouver l'intensité du courant qui circule dans la branche AB en déterminant la f.e.m £77, et
la résistance Rth du générateur équivalent de Thévenin.
4. Toutes les sources étant activées, calculer la puissance reçue par chacun des dipôles. Commenter.
x
-CDQ
A
R
R
R
B
Fig. 5.27.
P5- 2. Réseau en régime statîonnaîre
On considère le réseau en régime stationnaire représenté sur la figure 5.28.
1. Calculer, à l'aide des lois de Kirchhoff, les intensités des courants dans les différentes branches,
sachant que la f.e.m de la source de tension est £ = 6,4 V .
2. Quels sont les générateurs de Thévenin et de Norton correspondants, entre les nœuds A et B du
réseau ?
3. Entre A et B, on connecte une charge résistive. Quelle doit être la valeur de sa résistance R
pour que la puissance dissipée dans la charge soit maximale ? Calculer la puissance correspondante.
176
5. Théorèmes de base dans l'analyse des réseaux linéaires
B
C
/j
40 fl
y,
"1
6,4 V
160 O
160 fi
™
A
El
1
R2
1
320 n
D
A
R
R
B
FÏG. 5.28.
FIG. 5.29.
P5- 3. Courant stationnaire dans un ampèremètre
Le réseau de la figure 5.29 associe un montage potentiométrique, de f.e.m Zsi , et un montage
diviseur de tension, de f.e.m £2 • On connecte le curseur C et le point D aux bornes d'un ampèremètre
de résistance interne r.
1. Trouver, en appliquant le théorème de Thévenin, l'intensité J du courant qui parcourt l'ampèremètre, en fonction de E\ , E2, R\ , £2 > R et x, rapport de la résistance du conducteur AC sur
2. Pour quelle valeur de x, / s'annule-t-il ? Effectuer l'application pour £1 = 3 V, £2 = 6 V ,
R = 100 fi et £2 = 400 fi. Retrouver ce résultat directement, sans prendre en compte la première
question.
P5- 4. Bolomètre à pont de Wheatstone
Un bolomètre à pont de Wheatstone est un instrument qui permet de mesurer la température T
d'un corps, à partir de la variation de la résistance du conducteur ohmique que l'on met en contact avec
ce corps. Initialement, les quatre résistances sont égales à £ et le pont, alimenté par une source de
tension de f.e.m £, est équilibré.
1. En utilisant le théorème de Thévenin, trouver l'intensité du courant qui circule dans le milliampèremètre, de résistance r, placé dans la branche AB de recherche d'équilibre, lorsque la valeur de
l'une des quatre résistances varie faiblement : ( A£ <C £) .
2. Les conducteurs ohmiques étant en platine, la résistance varie avec la température absolue T
selon la loi :
R{T) = £o[l + A{T - TV)]
avec
To = 273,15 K
Dans le montage, £ = 12 V, £ = 100 fi et r = 2 fi, à la température ambiante Ta = 293,15 K.
Expérimentalement, en plaçant l'une des résistances en contact avec le corps considéré, à la température
T, le milliampèremètre détecte un courant de 0,1 m A . Sachant que A = 4 x 10-3 K-1 , quelle est la
température recherchée ?
P5- 5. Rôle d'un interrupteur dans un pont de Wheatstone
On se propose d'analyser l'ouverture et la fermeture d'un interrupteur K dans la branche diagonale
AB d'un pont de Wheatstone, comportant trois résistors, de résistances £1 , £2 et £3 connues avec
précision, et un quatrième composant, de résistance inconnue £4 (Fig. 5.30); £1 et £2 sont fixées,
177
Théorèmes de base dans l'analyse des réseaux linéaires
alors que l'on peut faire varier /?3. Le pont est alimenté, entre les points P oi Q, par une source de
tension stationnaire, de f.e.m E et de résistance interne négligeable.
A
B
Fig. 5.30.
1. a) Établir, en fonction de £, /?i , 7^2 , ^3 et R4 , l'expression de la tension entre les points A
et B, mesurée avec un voltmètre de très grande résistance interne. K étant ouvert.
b) Dans ce montage R\ = R2 = 2 kO. On fait varier i?3 jusqu'à réaliser l'équilibre du pont ; on
obtient cet équilibre pour la valeur {Rije = 804 fi . En déduire la valeur de R4 .
2. a) Dans le montage précédent, avec K ouvert et E = 1,23 V, on donne à la résistance du
troisième composant, une valeur R^, différente de la valeur d'équilibre (Rp^e, sans modifier les autres
éléments. On constate alors expérimentalement que la tension Uab vaut 0.5 V . Calculer les courants
qui circulent dans les différentes branches du pont, ainsi que la valeur de R3.
b) En appliquant le théorème de Thévenin, calculer l'intensité /q du courant qui parcourrait le
conducteur reliant les points 4 et i?, si on fermait K .
c) En présence du générateur, on insère, dans la branche AB, en série avec K fermé, une source
de tension supplémentaire idéale, de f.e.m E' = 0,5 V , le pôle positif en A et le pôle négatif en B .
Les intensités calculées à la question 2.a sont-elles modifiées. Si non pourquoi, si oui comment?
d) On maintient le générateur, de f.e.m E = 1, 23 V , ainsi que la source de tension idéale, de f.e.m
E' = 0,5V, mais on ajoute en série, entre A et B , une troisième source de tension, de même f.e.m
0,5 V et en opposition avec la précédente. Quelle est alors l'intensité / du courant dans la branche AB
lorsqu'on ferme K ? Comparer / à /q ? Commenter. En déduire la représentation d'un interrupteur
ouvert ou fermé à l'aide de sources de tension idéale.
P5- 6, Rôle d'un interrupteur en terme de source de courant
w b l
®
Dans le circuit représenté sur la figure 5.31a, avec les trois sources de tension, de f.e.m respectives
E\ , £2 et £3, on mesure, à l'aide d'un ampèremètre, de résistance interne négligeable, l'intensité du
courant qui traverse l'interrupteur K fermé. On obtient, de D vers B, une valeur de 1,0 A .
1. On supprime les trois sources de tension dans le réseau précédent, mais on connecte, entre les
points B et D, une source de courant d'intensité 1 A , orientée de B vers D (Fig. 5.31b). Calculer
l'intensité du courant dans la branche BC.
2. Quelle est la variation de tension entre les bornes B et C du réseau initial, avec les trois sources
de tension, lorsqu'on ouvre K ?
178
5. Théorèmes de base dans l'analyse des réseaux linéaires
20 a
K
D
20 a
60 a
40 a
A
D
40 a
60 a
50 a
50 a
&
c
Fig. 5,31.
P5- 7. Puissance dissipée dans une impédance de charge adaptée
Déterminer le générateur de Thévenin équivalent au circuit représenté sur la figure 5.32, entre
les points A et 5 , en régime sinusoïdal. L'amplitude de la f.e.m est 12 V . Un tel circuit générateur
débite dans une impédance de charge adaptée, c'est-à-dire que la puissance dissipée dans la charge est
maximale.
1. Calculer l'impédance de charge adaptée.
2. Quelle est la puissance dissipée dans la charge ?
K
j
30 a
w5mv- A
40/ a
' 20 a '
^ i
-20; a
30 a
20; a
-50; a
A
-50; a
r = 10 al
B
s
FIG. 5.32.
fig. 5.33.
P5- 8. Puissance dissipée dans un conducteur ohmique, en régime quasi stationnaire
vveb
-
Entre les bornes A et 5 du circuit représenté sur la figure 5.33, on connecte un conducteur ohmique de résistance R = 10 O. La valeur maximale de la f.e.m de la source de tension sinusoïdale est
90 V.
1. À l'aide du théorème de Thévenin, déterminer le courant qui circule dans ce conducteur, la valeur
maximale de son intensité, ainsi que son déphasage par rapport à la source.
2. Quelle est la puissance dissipée dans le conducteur ?
P5- 9. Mesure d'une tension par la méthode d'opposition
À partir d'une source de tension connue (£"1 ), il est possible de déterminer la tension d'une autre
source inconnue (£2) par la méthode d'opposition (Fig. 5.34). Cette dernière consiste à régler la valeur
du facteur a du potentiomètre, de résistance R, constitué des résistances en série aR et ( 1 — a)R
dans le but d'annuler le courant h .
179
Théorèmes de base dans l'analyse des réseaux linéaires
1. Déterminer les intensités des courants /| et h .
2. À partir de la condition Ï2 = 0, donner l'expression du rapport des f.e.m. E2/E1 .
3. Retrouver les courants I\ et f2 en utilisant la méthode des mailles adjacentes et en orientant les
deux mailles dans le sens horaire.
h
>
(1 - a)R
-y h
£1
A
1 ""-1=
aR
E.
Fig. 5.34.
P5-10. Triple réseau RC
La figure 5.35 représente un réseau électrique itératif dans lequel /? = 10 kfl et C = 39 nF. On
désigne par r la constante de temps de l'une des cellules.
1. À l'aide de la méthode des mailles adjacentes, établir l'expression du facteur d'amplification en
tension usjue.
2. Pour quelles valeurs de la pulsation m , le rapport uslue est-il réel ?
R
Uc
7777
R
C
R
c:
7777
c:
7777"
Fig. 5.35.
7777" ////
Fonctions de transfert. Quadripôles
Le concept de fonction de transfert joue un rôle essentiel en physique, surtout en électronique, mais
aussi en mécanique et en optique. En effet, chaque fois qu'un instrument fait correspondre une réponse
en sortie à une excitation en entrée, se pose le problème de son influence dans la relation entre l'entrée
et la sortie.
Le cas de l'électronique présente un intérêt particulier, en raison de la facilité technique avec laquelle on peut illustrer concrètement ce concept à l'aide de circuits simples. En effet, si l'on applique
à l'entrée d'un circuit RC (Fig. 6.1), une tension ue{r), on constate qu'en général la tension à la sortie iis{t) est différente de ue(t). L'étude de la relation entre us{t) et ue(t) relève précisément de la
théorie du transfert.
Plus généralement, on peut caractériser tous les systèmes linéaires en électronique par une fonction
de transfert. Aussi convient-il d'abord de rappeler la définition des systèmes linéaires en électronique.
•-C
ue{t)
R
LC
ei
S\
e2
S2
X
FIG. 6.1.
Fig. 6.2.
I. — SYSTEMES ELECTRONIQUES LINEAIRES
Considérons un système électronique faisant correspondre les tensions de sortie .çj (/) et .^(V) aux
tensions d'entrée e\(t) et ^(V) (Fig. 6.2),
1.1. — Définition d'un système linéaire
Un système électronique est linéaire si toute combinaison linéaire des tensions à l'entrée admet
comme réponse la même combinaison linéaire des tensions de sortie correspondantes :
A| e\ + A2 ^2 —> Ai si + A2 ^2
Ai et A2 étant deux constantes réelles ou complexes (Fig. 6.2). Cette propriété justifie l'importance
de la décomposition du signal d'entrée en une superposition de signaux sinusoïdaux selon l'analyse de
Fourier (cf. annexe 2). En effet, on peut considérer tout signal d'entrée, fonction du temps, comme une
superposition discrète ou continue de signaux sinusoïdaux dont l'amplitude complexe est une fonction
de la fréquence.
Fonctions de transfert. Qiiadripôles
181
Remarque : Les signaux sinusoïdaux sont simples car, relativement aux opérateurs qui apparaissent
dans l'expression des lois physiques, ils gardent leurs formes, lorsqu'on les dérive ou les
intègre par rapport au temps. Par exemple :
^ cos{(ot) = —o) sin(W) = wcos (mî + ^
La forme complexe de ces signaux donne un résultat techniquement plus intéressant,
puisque l'opération de dérivation d / dt se traduit par une simple multiplication :
^ exp(/û>r) = jco exp(jojt)
En langage plus élaboré, on dit, dans ce dernier cas, que le signal sinusoïdal, sous sa forme
complexe, est une fonction propre de l'opérateur dérivation.
1.2. — Fonction de transfert
Appliquons à l'entrée d'un circuit RC, tel que le précédent (Fig. 6.1), une tension sinusoïdale ue ,
de pulsation co = Irrf :
l
Ie{t) -Me,,„expOr)
On sait que la tension de sortie aux bornes du condensateur s'écrit ;
M.W = MVMexp(>r)
La relation entre les tensions d'entrée et de sortie est simple à établir puisque le système est un diviseur
de tension (cf. chapitre 2) :
, ,
Zc
(r) =
^
,
R+-ZC
R+Zc^
1 /{jC(o)
x
lIÀ,)
evJ
. ,
= R+l/ijCù))^'''
RTmc^) ^ = T
1 + jRCco ^
On en déduit le rapport u^{t)/ue(T) :
u^t)
ue(t)
=
1
:—
\+jio/ù)o
en posant
1
con = —RC
Il est souvent commode d'introduire le nombre sans dimension suivant :
x=~ =
f
-
/o
qui est une pulsation réduite ou \me fréquence réduite.
Ordre de grandeur : dans le cas concret ou /? = 5 kfl, C = 20 nF , on trouve :
ojo =
RC
= 104 rad s
1
et
/o = — —
^
= 1. 59 kHz
2-77
IttRC
J
Pour tout système linéaire, tel que le précédent, le rapport de la tension de sortie sur la tension d'entrée,
qui dépend de la pulsation oj , est Xz. fonction de transfert du système ; on la note très souvent H (Jco) en
électronique (cf. chapitre 13) :
1 Cjù)/ù)o
Le cas singulier où
= 0 correspond évidemment aux signaux stationnaires.
L'équation précédente est facile à interpréter : le système affecte chaque composante sinusoïdale,
en la multipliant par la fonction de transfert H {jco) .
182
6. Fonctions de transfert. Quadripôles
1.3. — Diagrammes de Bode
Pour des raisons pratiques, on utilise généralement comme variable, non la pulsation co exprimée
en rad ■ s-1 , mais la fréquence f = coj (2-7r) en Hz. On pose alors :
H(jto)=T{f) = \T(f)\exp[j4>(f)]
En outre, le domaine de variation de la fréquence, dit spectral, étant très étendu, puisque compris entre
quelques hertz et quelques centaines de mégahertz, on utilise en abscisse, non la variable /, mais son
logarithmique décimal 1g/, ce qui permet de resserrer l'extension du domaine significatif.
a) Gain en tension
On appelle gain en tension d'un système, exprimé en décibel, la quantité suivante :
G,(dB) = 201g|I(f)|
Cette définition fut introduite par l'ingénieur américain A.G. Bell pour deux raisons :
i) le module de Tff) pouvant lui aussi varier fortement, une échelle logarithmique permet, ici
aussi, de resserrer le domaine significatif de variation,
ii) la loi expérimentale du physiologiste G. Fechner montre que la sensation sonore d'un signal
acoustique est proportionnelle au logarithme de la puissance mécanique reçue par le tympan de l'oreille
et donc au logarithme de la puissance électrique fournie au haut-parleur (cf. Mécanique).
Comme l'unité logarithmique qui en résulte s'avère en pratique trop grande, on introduit le décibel
en multipliant le logarithme par 10. Le facteur 20 qui apparaît dans l'expression du gain en tension G;,
se justifie aisément, car la puissance est proportionnelle au carré d'une tension, ce qui se traduit par un
facteur 2 supplémentaire lorsqu'on prend le logarithme.
On appelle diagrammes de Bode, du nom de l'électronicien américain H. Bode, les représentations
du gain en tension G„(dB) et de la phase </> de la fonction de transfert en fonction de 1g/.
Remarque : Pour des raisons pratiques, on utilise parfois du papier semi logarithmique dont l'échelle
des abscisses, qui est celle des fréquences, est logarithmique et l'échelle des ordonnées,
qui est celle du gain, linéaire.
b) Détermination expérimentale
Expérimentalement, on détermine le diagramme de Bode relatif au gain comme suit : pour chaque
fréquence, on mesure les amplitudes des tensions d'entrée et de sortie à l'aide d'un oscilloscope. On en
déduit leur rapport et donc le gain que l'on porte sur le diagramme relatif au gain.
Notons que le module de Tff ) est évidemment non négatif, mais que le gain en décibel est lui
négatif dès que |r(/)| < 1 ; en outre, pour |r(/j| = 0, G,, = — oo .
On trace le diagramme de Bode relatif à la phase en comparant la phase de la tension de sortie à
celle de la tension d'entrée, ce que permet un oscilloscope utilisé en mode de Lissajous (cf. Introduction
expérimentale) :
0(/) = M)-(f>e{f)
avec
ue = ue,m ex p [/"(/»,(/")] exp(/27r/r)
et
m, = us,m exp[/"^(/")] txpijlTrf t)
On utilise de plus en plus des décibelmètres qui sont des voltmètres numériques gradués en dB ; dans
ces appareils, la tension efficace de référence est 0,775 V, ce qui correspond à une puissance de 1 mW
dissipée dans un conducteur ohmique, conventionnellement de résistance R = 600 fl. Pour la phase,
on préfère utiliser aujourd'hui un phasemètre, lequel donne une valeur plus précise que celle obtenue
avec un oscilloscope.
Fonctions de transfert. Quadripôles
183
Remarques : 1) Les filtres passifs sont caractérisés par un facteur d'amplification en puissance toujours
inférieur ou égal à l'unité, et donc un gain en puissance non positif, puisque par définition
ils n'utilisent pas pour leur fonctionnent de sources auxiliaires (cf. chapitre 1 ). Cependant
leur gain en tension peut, lui, être positif; c'est ce que l'on observe par exemple dans
l'étude de d'un circuit RLC lorsque la tension de sortie est la tension aux bornes du
condensateur (cf. chapitre 3) : si le facteur de qualité Q est supérieur à 1 , alors le gain
en tension sera positif pour une fréquence égale à la fréquence propre du circuit.
2) Une autre façon de détenniner expérimentalement la fonction de transfert consiste à
utiliser un générateur d'impulsions qui fournit en sortie la réponse impulsionnelle dont la
transformée de Fourier est précisément la fonction de transfert (cf. chapitre 15).
1.4. — Exemple du filtre RC
a) Diagramme de Bode
De la fonction de transfert Hijco) du circuit RC (Fig. 6.1), on déduit :
1
!(/) =
d'où
1
\T(f)\ =
[l + Cf/Zo)2]1/2
1 +Jf/fo
Par conséquent :
O» = 201g
[i + 07/o)2]1/2
= — 101g
et
é = —arctan
/o
foj
Sur la figure 6.3, on a représenté le gain en tension G,, et la phase cô en fonction de X = Igx
(^ = 10* ), x = ///o étant la fréquence réduite ; on porte directement x en abscisse, sur une échelle logarithmique. Il vient :
Gh = —101g (l + x2) = —101g (l + 102*)
et
f = —arctan(10A)
On voit que la valeur maximale du gain en décibel est 0, lorsque x = 0, soit X = —oo, ce qui n'est
pas surprenant puisque la valeur maximale de |Z(/) | est 1 . Les valeurs de Gu et 0 pour la valeur
singulière x = 1 ou X = 0 sont respectivement :
— 101g2 « —3 dB
0„(1) =201g
et
TT
0(1) =--rad
i ^(rad)
0
0
^ --H
-3^
.
X = Igx
,
X = Igx
" - - \
\
Vv
\
— tt/A- -
V
\
\
\
-20\
— TT jl b)
a)
Fig. 6.3.
"-s
184
6. Fonctions de transfert. Quadripôles
b) Représentation asymptotique
Le tracé point par point des diagrammes de Bode étant laborieux, on lui substitue généralement
une représentation asymptotique. Dans l'exemple du filtre RC, on décompose l'espace des fréquences
en deux zones délimitées par la fréquence /o ( x = 1 ), et on introduit la fonction de transfert normalisée H :
T(f) = n{x) =
= -L
d'où
G„ = 20lg 1 - 20lg{2l/'2) = 0 - 10Ig2 = -3 dB
é = —arctanx = —arctan 1 = —- rad
4
Les deux zones sont donc les suivantes :
i) Pour x =///o <C 1, on a :
H « 1
d'où
G,, = 201g |2i| ~ 0
L'asymptote du gain est une droite horizontale et la phase est nulle.
ii) Pour x =flfn
—
jx
1, on trouve :
-jx
d'où
G„
201g \H\ « 201g ( - j = -201gx = -20X
\ -^ /
L'asymptote du gain est une droite qui passe par G = 0 pour x = 1 et dont la pente vaut —20 dB par
décade, puisque qu'une décade correspond à XX = 1 , soit une multiplication par 10 du rapport ///q .
La phase est constante et égale à —-77-/2 rad .
Notons que ce même gain diminue de 6 dB , lorsque la fréquence / est multipliée par 2 :
Gu = -201g2 ^ -20 x 0,3 = -6 dB
On dit aussi que la chute de gain est de 6 dB par octave, car l'octave musicale est définie par un rapport
de fréquence égal à 2 .
On peut constater, sur la figure 6.3, que le tracé asymptotique donne l'allure des vrais diagrammes
avec une très bonne approximation.
Retenons que le gain en tension de ce circuit électronique s'effondre pour les hautes fréquences.
Aussi est-il utilisé pour privilégier le transfert des faibles fréquences au détriment des hautes fréquences
présentes dans le signal d'entrée.
c) Bande passante « — 3 dB
La fréquence caractéristique /o , correspondant à x = 1 , symbolise une rupture dans la courbe de
gain et de phase. Aussi l'appelle-t-on fréquence de coupure à —3 dB , car 20 Ig iZC/o)! = —3 dB et la
note-t-on souvent fc.
Comme fc —fo — 1/{27tRC) délimite la limite supérieure de la bande passante à —3 dB du filtre
et que la limite inférieure est la valeur nulle, la fréquence de coupure fc détermine la bande passante
du système. Dans cette bande, le déphasage entre les signaux d'entrée et de sortie est pratiquement
constant ; il est nul pour / </o et vaut —7rf2 rad pour / >/o ; pour / =/o sa valeur est —-77/4 rad .
185
Fonctions de transfert. Quadripôles
1.5. — Diagramme de Nyquist
Dans le diagramme de Nyquist, du nom du physicien américain H. Nyquist, on représente la fonction de transfert H(Jo}) dans un plan complexe : on porte sur l'axe réel Re{/^} et sur l'axe imaginaire
en fonction, par exemple, de la pulsation réduite x. Le point figuratif M décrit, dans ce plan,
une courbe lorsque x varie. Dans l'exemple précédent, l'élimination de x entre :
=|ilï2
=
et
l-{"l
donne ;
Hj = H^x1 = H2r(jj- -lSj=Hr- H;
ce qui s'écrit
(Hr - 0, 5)2 +
= 0,25
Ainsi, le diagramme de Nyquist est, dans ce cas, le cercle de centre C de coordonnées (0.5 :0) et
de rayon /? = 0,5 (Fig, 6.4). Lorsque / augmente, le point représentatif M décrit le demi-cercle
inférieur AIO, A étant le point de coordonnées ( 1 ; 0 ) et O l'origine du diagramme. Dans la pratique,
ce diagramme est moins utilisé que le diagramme de Bode, car la lecture des fréquences est moins
commode. En revanche, il présente un intérêt pour analyser la stabilité des circuits (cf. chapitres 12, 13
et 14).
ijj —
0,5
1
X = Rel//}
Quadripôle
us
M
FIG. 6.4.
FIG. 6.5.
II. — QUADRIPÔLES ET FILTRES PASSIFS
Le circuit simple de la figure 6.1 peut être considéré comme un quadripôle, c'est-à-dire un système
à quatre bornes, deux à l'entrée, entre lesquelles on applique une tension ue, et deux à la sortie entre
lesquelles on mesure la tension de sortie us, même si une borne de sortie est reliée à une borne d'entrée
(Fig. 6.5).
Si le gain en tension varie, lorsqu'on fait varier la fréquence, on dit qu'on a réalisé un filtre en
fréquence. Comme, en outre, la puissance à la sortie est nécessairement inférieure à la puissance à
l'entrée, puisque le système ne reçoit pas d'énergie d'une source auxiliaire, le filtre est passif
II. 1. — Classification des filtres passifs
a) Selon leur fonction
Dans cette classification, on distingue les filtres passe-bas, les filtres passe-haut, les filtres passebande et les filtres coupe-bande (ou réjectecteur de bande). On les désigne parfois, de façon plus précise,
par le nom de la fonction qui les caractérise ou par celui d'un auteur historiquement lié à leur étude.
186
6. Fonctions de transfert. Quadripôles
Ainsi, en électronique, le filtre passe-bas exponentiel et le filtre passe-bas de Butterworth ont pour
fonctions de transfert respectives, en fonction de la fréquence réduite x :
n{x) = exp( -x)
et
H{x) =
(1
Remarque : En optique incohérente, le filtre spatial de Butterworth est souvent défini par la fonction
de transfert en puissance, laquelle est donnée par le carré du module de F expression précédente (cf. Optique).
b) Selon leur ordre
De façon technique et spécifique à l'électronique, on classe les filtres selon leur ordre, c'est-à-dire
selon le degré le plus élevé des polynômes qui apparaissent dans la fonction de transfert H(jco). Ainsi,
les fonctions de transfert :
H(j.co.
Aco-\-B
Coj + D
ou
Hijio) —
B
Cco -f D
A , B y C, D étant quatre coefficients constants, sont des filtres d'ordre î. En revanche :
A i (o~ -(- 5
-f- C|
-|- B2O) -f- C2
H{j(o) =
B\ o) F C\
A2àfi -|- B2à)
C2
et
H{jo)) —
C,
A2&^ "h B2O) -f- C2
caractérisent des filtres d'ordre 2.
II. 2. — Gabarit d'un filtre passif
On appelle gabarit d'un filtre passif la zone géométrique qui le caractérise dans le diagramme
de Bode.
Pour un filtre passe-bas, cette zone peut être définie par la fréquence de coupure /1 , à G\ dB , en
dessous de laquelle tous les signaux sont transmis, et par la fréquence /2(> /î) à G2(< G]) dB, qui
donne l'atténuation minimale dans la bande de fréquence à rejeter (Fig. 6.6a).
On montre que les gabarits des autres filtres peuvent se déduire du gabarit d'un filtre passe-bas ;
par exemple pour un filtre passe-haut, la zone est symétrique par rapport à la fréquence moyenne, comprise entre f\ et /2 (Fig. 6.6b). Les gabarits des filtres passe-bande ou réjecteurs de bande sont des
juxtaposition de gabarits passe-bas et passe-haut.
G,,
Gu
«1
«1
@2—
«2—
Fig. 6.6.
187
Fonctions de transfert. Quadripôles
II. 3. — Filtres passe-bas d'ordre 1
a) Filtre RC
L'exemple le plus simple de filtre passif passe-bas est celui du dipôle RC précédent (Fig. 6.1).
Son étude expérimentale est simple à conduire. On a vu que, pour R — 5 kfl et C = 20 nF, on avait
/o = l,59 kHz.
Le choix pratique d'une valeur de R de l'ordre de quelques kO n'est évidemment pas hasardeux,
car l'impédance interne du GBF (générateur basse fréquence), de l'ordre de 50 lî , a ainsi une influence
négligeable ; on peut donc se fier à la tension affichée par le GBF. Sinon, il faudrait ajuster l'amplitude
de cette dernière, afin que la tension réelle à l'entrée du filtre ne change pas lorsque la fréquence varie.
De façon qualitative, c'est-à-dire sans calcul, il est facile de montrer qu'un tel système se comporte comme un filtre passe-bas. En effet, l'impédance offerte par le condensateur, qui est \/{jC(o),
s'effondre pour les hautes fréquences ; la tension à ses bornes devient donc très faible. C'est évidemment l'inverse à très basse fréquence.
Un filtre passe-bas, tel que le circuit simple précédent, est utilisé lorsqu'on veut privilégier les
basses fréquences dans un signal électrique; c'est ce que l'on réalise à la sortie d'un amplificateur
audio, en connectant, aux bornes du haut-parleur (HP), un condensateur (Fig. 6.7).
R
C
P
Fig. 6.7.
b) Filtre LR
La fonction de transfert Hifco) du diviseur de tension LR , représenté sur la figure 6.8a, est facile
a exprimer ;
= ^ =
R
M s?
R
1
:— =
—
jLco
1 -f jx
avec
(o
f
x= — — —
ù)o
f)
R
coq = —
L
et
On en déduit :
H(x) =
1
1 +jx
ou
H{x) =
O)
avec
i + O)-'
1
R
/0 = —27r L
Il vient, comme précédemment :
1
m = {\+x2yn
Gu = —201g|21| = — 101g(1 +a-2)|
et
f = —arctan.*
Le résultat est donc le même que celui obtenu avec le circuit RC. Dans la pratique, l'utilisation des
bobines est moins commode, car ces composants sont plus encombrants et souvent mal représentés par
une seule inductance ; on doit prendre en compte une résistance supplémentaire. On tend de plus en plus
à les remplacer par des montages équivalents avec amplificateurs opérationnels (cf. chapitre 8).
L
L
R
H
a)
b)
FIG. 6.8.
188
6. Fonctions de transfert. Quadripôles
Application : filtrage des basses fréquences à la sortie d'un baladeur
On sélectionne les basses fréquences à la sortie d'un baladeur à l'aide d'un filtre LR, L étant
l'inductance d'une bobine et R la résistance du haut-parleur (Fig. 6.8b). Les ordres de grandeur sont
£ = 0,5 mH et /? = 8 D. Par conséquent :
1
/o
=
8
=
= 2 540 Hz
277 0,5 xlO-3
2-77 L
soit
/o = 2,54 kHz
Remarques ; 1) Avec un condensateur au lieu d'une bobine, il aurait fallu une forte capacité, puisque :
277/??
20 jjlF
2) Soulignons que tous les filtres passe-bas d'ordre 1 sont décrits par la même fonction
de transfert, laquelle est complètement définie par la valeur d'une seule caractéristique, la
fréquence de coupure fa .
II. 4. — Filtres passe-haut d'ordre 1
a) Filtre CR
L'exemple le plus simple et le plus répandu de filtre passif passe-haut est le dipôle CR (Fig. 6.9a).
Une analyse qualitative préalable permet d'obtenir rapidement le comportement d'un tel filtre. Pour une
fréquence / faible, la tension aux bornes du condensateur est bien plus grande que la tension de sortie
aux bornes du résistor; cette dernière est donc négligeable devant la tension d'entrée. La fonction de
transfert s'obtient facilement puisqu'on a toujours un diviseur de tension :
, .s
i±s
^
iV
=
L
R+l/(JC(o)
=
soit
H(j(o) =
1 + \/ijRCù))
——
1 —JÙJQ/Ù)
avec
wq = ^
RC
On en déduit, en fonction de x =///o :
O)
1 -j/x
1 4- (jx)-
1+ (/■*)
d'où :
Gu = —101g ( 1 + -^
et
f = arctan
Vx
et
é — arctan 10"
En fonction de X = 1g x:, il vient ;
G„ = -ioig(i + i(r2X;
Remarque : Notons que l'on passe d'un filtre passe-bas du premier ordre à un filtre passe-haut du
premier ordre en procédant au changement de variable : {jx) en (jx)~[ .
Sur les figures 6.9b et 6.9c, on a représenté les diagrammes de Bode en gain et en phase d'un tel
circuit avec /? = 10 kO et C = 10 nF. On voit que le gain croît lorsque la fréquence augmente ; le
filtre est passe-haut avec une fréquence de coupure fa = fa = 1,59 kHz.
On déduit aisément Gu et f , relatifs au filtre passe-haut CR, des mêmes grandeurs relatives au
filtre passe-bas RC, en procédant au changement X en —X. En effet, le gain et la phase sont des
fonctions respectivement paire et impaire de X :
= — 101g (1 + 10
2X
)
et
(f) = arctan 10
x
Fonctions de transfert. Quadripôles
189
G„(dB)
0
^=
. ^>(rad)
tt/2
C
- -7r/4
R
7777
\
\
-20
4.
0
b)
a)
X = \gx
c)
Fig. 6.9.
b) Applications
1) Filtrage des hautes fréquences à la sortie d'un baladeur
Pour sélectionner les hautes fréquences de la tension à la sortie d'un baladeur, on utilise un filtre
passe-haut en ajoutant un condensateur en série avec le haut-parleur. Par exemple, si /? = 8 fi et
C = 5 |jlF , la fréquence de coupure est :
1
fc =
4 kHz
2ttRC
2) Utilisation de la voie AC d'un oscilloscope
Dans un oscilloscope, la voie AC se distingue de la voie DC par un condensateur en série à l'entrée (cf. Introduction expérimentale) ; ce dernier, associé à la grande résistance d'entrée de l'instrument
de mesure, forme un filtre passe-haut (Fig. 6.9a) qui étouffe les fréquences faibles, notamment la fréquence nulle.
Calculons la capacité C nécessaire pour que la fréquence de coupure d'un oscilloscope, de résistance d'entrée R = 1 MO, soit de 1 Hz :
C
1
1
27rfcR
27r x 106
0,16 |jlF
Remarque : On peut réaliser des filtres passe-bas ou passe-haut plus sélectifs en plaçant en cascade
plusieurs filtres d'ordre 1 identiques, comme on le verra plus loin. On obtient ainsi des
filtres d'ordre 2 ou plus élevé, suivant le nombre de cellules. Cependant il existe aussi des
systèmes électriques globalement caractérisés par des fonctions de transfert d'ordre 2 ou
plus élevé (cf. Exercices).
II. 5. — Filtres passe-bande d'ordre 2
a) Circuit RLC série
Le circuit oscillant RLC série peut être considéré comme un système qui fait correspondre, à la
tension d'entrée aux bornes du circuit, la tension de sortie, aux bornes du résistor, proportionnelle à
l'intensité du courant (cf. chapitre 3). Il se comporte comme un filtre, puisque, lorsqu'on fait varier la
fréquence de la tension sinusoïdale à l'entrée, l'amplitude de la tension de sortie varie (Fig. 6.10). On
sait que cette dernière passe par un maximum pour une pulsation to du GBF égale à la pulsation propre
ojq du circuit :
a)
(Oo
/j_V/2
KLCJ
190
6. Fonctions de transfert. Quadripôles
c
o
o
o
R
Oscilloscope
7777
Fig. 6.10.
Le calcul de la fonction de transfert H(j(o) ne présente pas de difficulté :
RCù)
HCco) = ^ =
=
^
ue
R F jLoj +1/ (jCoj)
RCù) + j(LCù)2 — 1 )
Le filtre est donc du deuxième ordre. Il est commode d'exprimer H{jco) en fonction de wq et du facteur
de qualité Q — Loyo/R :
. .
1
Hijco) =
; ;
7—1 +jQ{(o/(O0 - COQ/M]
On en déduit, en introduisant la fréquence réduite x = co/coq =f/fo :
n{x) =
i
i
i +jQ{x - i A)
1
x
+ Ql(J ) + (/^)_,]
d'où:
1/2
Gu = 201g \H\ = 201g
[1 + Q2(X — i/x)2]1/2
-101g
1+0
[x~x
et ;
d> = — arctan eu-En fonction de la variable X = Igjc, on obtient :
Gu = —101g
1 + Q2{\0x - 10-x)l/2]
et
f = -arctan [Q (10x - lO^
Sur la figure 6.11, on a représenté les diagrammes de Bode relatifs au gain et à la phase, en fonction
de X = \gx = lg(/7/o) • H s'agit ici d'une autre représentation que celle donnée habituellement (cf.
chapitre 3) du pic de résonance qui apparaît pour X = 0 , soit x = 1 ou / = ^ .
Lorsqu'on réalise un tel montage, on doit prendre en compte la résistance r de la bobine, dans le
calcul de Q, ainsi que la résistance interne du GBF, de l'ordre de 50 fl.
Ordres de grandeur : si L = 0,1 H , /? = 90 fl, C = 0,2 pE, on trouve :
1/2
/o = è(è
= 1,13 kHz
et
Q=
L(OQ
~R~
= 7.9
On peut utiliser un tel filtre pour sélectionner une fréquence déterminée dans la tension d'entrée ; il suffit
de modifier la valeur de la capacité jusqu'à obtenir un gain maximal aux bornes du résistor. On rend le
circuit sélectif en augmentant Q , concrètement en diminuant R.
191
Fonctions de transfert. Quadripôles
G,,
<9(racl)
X=\gx
tt 2
X=\gx
0=5
0 = 20
— TT 2
0= 5
(9 = 20
b)
a)
FlG. 6.11.
Remarques .■ 1) On s'affranchit de la résistance interne du générateur en utilisant un amplificateur opérationnel monté en suiveur (cf. chapitre 8).
2) Entre la tension de sortie prise aux bornes d'un condensateur et la tension d'entrée, la
fonction de transfert est évidemment différente : le gain en tension passe par une valeur
maximale non nulle, alors que le filtre est passif (cf. Exercices).
b) Filtre de Wien
Le filtre de Wien, du nom du physicien allemand C. Wien, à ne pas confondre avec son cousin
W. Wien à qui l'on doit des travaux sur le corps noir (cf. Thermodynamique), est un filtre passe-bande
d'ordre deux constitué de deux résistors et de deux condensateurs identiques, disposés comme le montre
la figure 6.12.
R
X
C
R
7777"
7777
Fig. 6.12.
Établissons l'expression de sa fonction de transfert, en nous appuyant sur le diviseur de tension ainsi
constitué :
1
Z2
H(JÛ))
ue
Z, +Z2
1 + Z1/Z2
avec :
Z|=*+
1
jCù)
R
et
jCù)
Z2=
"
/^o)
_
R-F 1/ {jCù))
«
1 + jRCco
Il vient, en effectuant :
Zj
1 + jRCo)
Z2
jCco
x
1 + jRCù)
1 — R2C2ù)2
R
j2RCû)
2+9 "'
\^o
jRCù)
6,0
ù)
On en déduit :
H(Jco) =
———^
3+7(a)/&)o —
——
soit
lLix) =
77 ~—n-T
3+j{x—l/x)
OU
0){)
RC
192
6. Fonctions de transfert. Quadripôles
en introduisant la fréquence réduite x = oj/coo —f/fo . Ainsi :
n{x)
i
Q
l F Q[(jx) + (jx)-1]
aVeC
^
3
d'où:
1
\U{x)\ =
2 1 2
[9 + (x — 1/x) ] /
' x — X/x
f = — arctan
"
V
3
et
"
Sur les figures 6.13a et 6.13b, on a représenté les diagrammes de Bode du gain G,, et de la phase f en
fonction de X = Ig^:.
Gu = 20\g\n\ = —101g |9 + (10 - 10
-X\2\
et
é = —arctan
iox-io-x\
On voit que Gu passe par sa valeur maximale — 9,54 dB , correspondant à |r| = 1/3 , lorsque X = 0 ,
soit x = 1 ou f = fo . Pour R = 5 kfi et C = 10 nF, fa vaut ;
1
/o
G„(dB)
0
x
3,18 kHz
ITTRC
firaâ)
= ]ëx
- tï (2
0
X = \gx
— 7r/2
b)
a)
Fig. 6.13.
II. 6. — Filtres coupe-bande d'ordre 2 en double T
Le filtre, en double T, représenté sur la figure 6.14, est constitué de deux filtres en T, l'un formé de
deux condensateurs identiques, de capacité C, séparés par un résistor, de résistance R/2 , l'autre formé
de deux résistors, de résistance R, séparés par un condensateur de capacité 2C.
C
N
C
K
R
R
2C
Us
R/2
Fig. 6.14.
Notons, avant tout calcul, que us ^ Me à haute fréquence (o) « oo), ainsi qu'à basse fréquence
(û> « 0). Dans le cas concret où R = 10 kfi et C = 15 nF, coq et /q valent respectivement :
cûq =
RC
=6,61 x 10 ' rad ■ s-1
et /o = —= 1,062 kHz
Itt
193
Fonctions de transfert. Quadripôles
On obtient rapidement le facteur d'amplification en tension, en appliquant le théorème de Millman aux
nœuds ^et 5, le filtre ne débitant sur aucune charge. Il vient, respectivement :
_ Ile/R + Hs/R
MK
v — _ ,_
_
2/R + j2Coj
.. _iCcoue+jCo)us
ll\r
—
__
-N
jlCoj + l/R
_UK/R+jCo}UN
—
1 !R JCco
^
et
ce qui s'écrit, en introduisant la fréquence réduite x = RCco = oj/cûq =f/fo :
_
+
UN = Jx
^
^2(1+jx)
Uy —
-K
2(1 F jx)
ei
-
rr _ Hk+MN
Us —
\+jx
Ainsi, remplaçant dans cette dernière équation uK et uN par leurs expressions respectives , on trouve :
_ fe +
- x2)
2(1 +jx)2
ue + ul; _ 2(1+jx)2
1-x2
.
soit
On en déduit :
ue _ 2{]
u
—o
jx)2
1 =
\ — x2
2(1 + jx)2 - l+.v2
1 - x2
1 -
1 — x + /4x
:
4—
1 -x2
h.
— =
et
1 -x2
1 — x2 + j4x
Finalement :
1—X2
n(x)
—
—
0
—w
1 - x2 + ;4x
ce qui s'écrit aussi, en divisant les deux membres par jAx :
n(x) =
(1-x2)/{47x)
Q[ijx) + (ix)-
2
i + (i - .v )/4/.v
Q=
avec
i+eio'A-) + (/.t)-1:
Ainsi :
Gu = 201g
1 — x2
2
1 - x + ;4x
et
f = —arctan
4x
1 -x2
Sur la figure 6.15, on a représenté les diagrammes de Bode relatifs au gain et à la phase, en fonction de
X = lgx :
^
11 ~
g
11-102X|
[(1 - lO2^)2 + 16 lO2^]'/2
et
,
^"
arctan
4 x 10A
i _
Les fréquences voisines de /o sont étouffées. Le système se comporte bien comme un filtre
coupe-bande.
. 1 G„(dB)
0
TT j2 -
% = ]ëx
> 0(rad)
0
f
— 7r/2
a)
b)
FlG. 6.15.
— 1g x
194
6. Fonctions de transfert. Quadripôîes
III. — ASSOCIATION EN CASCADE DE FILTRES PASSIFS
Très souvent, les filtres passifs réels se présentent comme des associations en cascade de quadripôîes, tels que ceux qui ont été étudiés précédemment. Il est alors commode de décrire le comportement
linéaire de ces systèmes par une matrice de transfert, laquelle permet de passer des caractéristiques
tension-courant, à l'entrée, à celles tension-courant, à la sortie (Fig. 6.16). Notons que le courant de sortie is, qui traverse l'impédance de charge Zc , sort de la borne 3 du quadripôle.
Désignons par Xe la matrice colonne formée par les données tension et courant à l'entrée et par
Xs la matrice colonne correspondante à la sortie. Il vient :
X, = [T]
avec
[T] =
a
c
b
d
car
1
hf
et
cu^-i-df
3 •a
c
b
d
Zc
Us
2
FIG. 6.16.
III. 1. — Matrices de transfert élémentaires
Les matrices de transfert des systèmes électroniques peuvent être obtenues à partir de deux matrices
de transfert élémentaires de quadripôîes simples Qi et Q{ représentés sur la figure 6.17 : le premier
Qi est constitué d'une impédance ^ longitudinale entre les bornes 1 et 3 du quadripôle et le second Qt
d'une impédance 2 transversale entre les bornes 1 et 2.
—>■
. 'e
ue
-[
z
>
i l.s
Us
*
b) Q,
a) Q,
Fig. 6.17.
a) Matrice de transfert de Qi
Les relations entre l'entrée et la sortie sont très simples à établir (Fig. 6.17a)
Ht = Ue - ZÎe
et
f —f
ce qui se met sous la forme matricielle suivante :
X^lTjiXe
avec
Notons que le déterminant de la matrice [T]i vaut 1.
[7^ =
1
0
—z
1
195
Fonctions de transfert. Quadripôles
b) Matrice de transfert de Q,
De même, pour le quadripôle Çf (Fig 6.17b) :
et
M* = He
'v —
H le
Z
d'où, matriciellement :
Xx = [T]tXe
avec
[7],
1
0
-l/z
1
Le déterminant de [7], est, lui aussi, égal à 1.
III. 2. — Matrice de transfert d'une association de quadripôles en cascade
Les matrices de transfert élémentaires permettent d'en déduire simplement la matrice de transfert
du quadripôle Q formé par l'association en cascade de quadripôles élémentaires. En effet, en procédant
de proche en proche, on voit que la relation entre Xe et Xs s'obtient en multipliant entre elles les
matrices élémentaires.
Notons que l'ordre dans l'écriture des matrices élémentaires est l'inverse de celui dans lequel les
quadripôles se suivent (Fig. 6.18). Ainsi, on écrira, pour n quadripôles, qui se suivent en cascade dans
le sens Q\ , Qi > •■•Qk • • •
> de matrices de transfert respectives [T)], [To],[T^] .,. [7,,] :
[T] = [r]„x...[r]tx...[r]2x[T]1
Le déterminant de [7] vaut 1 puisqu'il est le produit de déterminants tous égaux à 1 .
02
« ... «
Qn
Fig. 6.18.
Pour trouver la fonction de transfert de Qf\\ suffit de rappeler les relations linéaires suivantes :
My = a ue
b ie
et
is = cu^-^-d i_e
et de noter que l'on doit avoir iy = 0. Il en résulte que :
hc
us = aue-—ue
d
d ou
u
hc
ad — hc
1
— = a- — =
— = ue
d
d
d
puisque le déterminant ad — bc de la matrice vaut 1 . Ainsi, la fonction de transfert FKjto) = Tif)
s'identifie finalement à l'inverse de l'élément de matrice d :
Remarques : 1) On aura probablement noté l'analogie de traitement avec l'analyse matricielle en optique géométrique (cf. Optique).
2) Les électroniciens définissent souvent la matrice de transfert par l'inverse de la matrice précédente, c'est-à-dire la matrice qui détermine l'entrée à partir de la sortie, probablement pour éviter l'ordre inverse dans l'écriture des matrices successives. Notre choix
est conforme à celui que l'on a déjà adopté en optique, précisément « la sortie en fonction de l'entrée ».
196
6. Fonctions de transfert. Quadripôles
III. 3. — Exemples
a) Matrice de transfert du quadripôle passif en T
Pour le quadripôle passif en T (Fig. 6.19a), on a :
soit
Xs = [T]Xe
avec
[F] = [rj/fe) [r]?fe) [F]/(z,)
Il vient, en explicitant :
H
r
1 .
zi
0
1
Z3
^
1
-1/Z2
0
1
-23
1
1
1
1
1
0
[71
1 + Zl/zo
-1/Z2
A
-(z\Z2 + Z\Z3 + zizfjlzi
1+Zl/Z2
Zl
12
Zi
Z3
b)
Fig. 6.19.
b) Matrice de transfert du quadripôle passif en H
De façon analogue, avec le quadripôle en II (Fig. 6.19b), on obtient :
soi:
x, = [r]zf
avec
[r] = [r],^) [r],(4) [r],(ai)
On trouve, en explicitant :
1
i + 4 Al
-{z\ + 4 + 4)/(44 )
-4
+ 4 As
T—1
-4 '
1
(Tl
" 1
0
0 T-H
0
1
1
1
m
1
"
1
1
1
III. 4. — Théorème de Kennely ; conversion triangle-étoile
Ce théorème, qui porte le nom de Félectrotechnicien américain du début du XXe siècle A. Kennely,
donne les relations auxquelles doivent satisfaire les impédances pour que les quadripôles en T et en II
soient équivalents. De façon plus imagée, le quadripôle T est dit en étoile et II en triangle.
En identifiant les éléments des matrices précédentes, on obtient respectivement ;
Z\Z2 + Z1Z3 + Z2Z3
22
Z\
,
— Z2
22
J_ _ 2l + 4 + 4
22
44
1+^ = 1+4
22
23
On retient généralement cette équivalence sous les deux formes suivantes :
et
Zk =
Eiï
4 =
Zk
selon que l'on passe du montage en triangle (Il d'impédances 4) vers celui en étoile (T d'impédances Zk ), ou l'inverse. La conversion triangle-étoile est largement utilisée en électrotechnique, précisément pour économiser un fil conducteur dans le transport de la puissance électrique, en triphasé (cf.
chapitre 2).
197
Fonctions de transfert. Quadripôles
III. 5. — Association de deux cellules identiques RC
1
o
1
On détermine la matrice de transfert de l'association de deux cellules identiques en portant à la
puissance deux la matrice de transfert Trc d'une seule cellule (Fig. 6.20) :
[7V = [r],(c) [r];(«) =
-jCo)
1
0
1
-R
1
1
—jCco
-R
1 + jRCco
La fonction de transfert d'une cellule, H(Jco) =
, s'en déduit à l'aide de l'inverse du quatrième élément de la matrice :
. .
i
1
H(jio)7 = — =
^
d
1 + jRCco
R
C —'—
Ue
C——
FIG. 6.20.
Pour obtenir la fonction de transfert de l'ensemble, effectuons la multiplication matricielle Trc Trc
en introduisant la fréquence réduite x = RCco :
[T]
1
-jx/R
-R
1 +jx
x
1
-jx/R
-R
1 -Fjx
1 + jx
—jlx/R -(- x2/R
5
—R — /?(1 + jx)
jx + (1 + jx)2
Ainsi :
m =
1-fjr'x
—jlx/R + x2/R
—R{2 -\-jx)
1 — x2 + j3x
d'où l'on déduit :
1
U{x) =
1— x2 + j3x
On trouve alors aisément le gain en tension Gu et la phase cf? :
Gu = 201g \H{x)\ = — 101g[(l — x2)2 + 9x2]
et
é = arctan
3x
2
x - 1
Ce filtre est donc du deuxième ordre. Pour / <C/c, Gu ~ 0 dB , alors que, pour / ^> /c , Gu s'effondre ;
lorsque f = fc , Gu = —101g 9 « —9,54 dB . Sur la figure 6.21, on a représenté les diagrammes de
Bode correspondants.
> » ^>(rad)
' G,, (dB)
X - Igx
>-
0
0
-934^
— 7r/2-
— TT a)
b)
Fig. 6.21.
X - Ig.i
198
6. Fonctions de transfert. Quadripôles
IV. _ CARACTERISTIQUES DES QUADRIPOLES
Nous venons de voir que les quadripôles se comportaient comme des filtres dont la caractéristique
essentielle était leur fonction de transfert en tension Tff) = u^li±e, d'où leur nature passe-bas, passehaut ou autre, selon la variation du gain Gu = 201g |T| en fonction de 1g/.
Comme le gain en tension de ces filtres est souvent positif, c'est-à-dire que le module du rapport
des tensions est supérieur à l'unité, on les qualifie d'amplificateurs en tension.
Un quadripôle se comporte généralement comme un filtre passe-bande. Le diagramme de Bode
donnant le gain en fonction de la fréquence permet de déterminer la bande passante à 3 dB , à l'aide des
fréquences f\ et fi pour lesquelles le gain Gu satisfait à l'inégalité :
Gu ^ Gu>max - 3 dB
On obtient expérimentalement ce diagramme en appliquant à l'entrée une tension sinusoïdale et en
déterminant le facteur d'amplification en tension Au et donc du gain Gu correspondant pour chaque
fréquence / (Fig. 6.22). La bande passante à —3 dB est l'intervalle spectral :
A/=/2-/l
f\ et /2 étant respectivement la fréquence de coupure basse et la fréquence de coupure haute.
Gu (dB)
1
3
(Cjômax
vr:
TN
r
4
f
\
/2
Fig. 6.22.
En dehors du gain en tension et de la bande passante des quadripôles, il existe d'autres grandeurs
caractéristiques.
IV. 1. — Impédance d'entrée d'un quadripôle
Schématiquement, un quadripôle reçoit un signal d'entrée d'un GBF, lequel peut être assimilé à une
f.e.m eg et une impédance interne Z? . Ce générateur débite un courant d'intensité ie dans {'impédance
d'entrée Ze de l'amplificateur (Fig. 6.23). À la sortie, l'amplificateur se comporte comme un générateur
de Thévenin, de f.e.m Auue et d'impédance interne Zs, appelée impédance de sortie du quadripôle ; il
débite un courant d'intensité is dans une c/iarge d'impédance Zc .
L'impédance d'entrée Ze est définie par le rapport (Fig.6.23) :
En général, Ze dépend de l'impédance de charge Zc .
199
Fonctions de transfert. Quadripôles
_L
n
Auuc u*
FlG. 6.23.
Exemple : mesure de l'impédance d'entrée d'un oscilloscope
Le schéma représenté sur la figure 6.24a permet de mesurer la résistance d'entrée Re de l'oscilloscope ; on applique, à l'entrée verticale 7 de l'appareil, une tension stationnaire délivrée par un dipôle,
lequel est formé d'un générateur de tension, de f.e.m £, et d'un résistor de résistance réglable Rv .
Pour Rv = 0, la déviation verticale du spot est yo î on fait alors varier Rv jusqu'à la valeur R^/j
telle que la déviation devienne )'o/2 - On a alors Re = Rv = R\/2 \ on trouve généralement une valeur
de l'ordre de 1 MO.
Remarque : En toute rigueur, on devrait tenir compte de la résistance interne du générateur, mais cette
dernière est négligeable devant Re.
■Y
oscilloscope
R,
Y
oscilloscope
R.
R.
Rr
a)
Ce uc
R.
-TL
b)
FIG. 6.24.
L'impédance d'entrée ne se réduit pas à Re ; elle présente aussi un caractère capacitif que Ton
traduit par un condensateur, de capacité Ce en parallèle avec Re . Pour le vérifier et mesurer Ce , il suffit
de remplacer, dans le montage de la figure 6.24a avec Rv = R\/2 > la tension stationnaire précédente par
une tension carrée, de hauteur E égale à quelques volts et de fréquence quelques kHz (Fig. 6.24b). Lors
de la charge du condensateur, la tension aux bornes du condensateur satisfait à l'équation différentielle
suivante (cf. chapitre 4) :
E = Rvi + iic
avec
i=
d qç
uc_
df
Rfi
C
àuç
Uc
~àT
Comme Rv — Re , il vient :
^ ^ âiic
E = RPCp—
h 2uc
dt
.
soit
duc
E
r—
h uc =
dt
2
en posant
ReCe
r = —-—
2
Ce type d'équation différentielle est bien connu (cf. chapitre 4). Sa résolution donne :
, ,
—
, t\
Cte x exp ( —J
E
—
.
soit
, ,
E
uc{t) = —
1 — exp ( — —
T
200
6. Fonctions de transfert. Quadripôles
Ainsi, pour t = r :
Uc(f)
= |(l-«■■') «0 316E
On accède à Ce en mesurant r.
Ordre de grandeur : avec i? = 6 V , on a obtenu une tension égale à 1, 9 V pour / = r « 8,5 [jls . On
en déduit la capacité suivante :
Ce = — ^ 17 F
pF
R
Une autre façon de déterminer Ce consiste à ajouter, en parallèle avec Rv = Re , un condensateur de
capacité variable Cv . Le circuit admet alors comme fonction de transfert :
H(Jù)) = — =
ue
Ze
Ze
Z
avec
_
Ze =
Re
;———
1 -)- JReCeù)
et
Z=
R,-
Re
1 -f- jRvCvù)
1 4"}ReCvo)
On trouve, en effectuant :
H{JOJ) =
1
1 4" jRgCyiO
1 4- Z/Ze
2 F jRe{Cv 4- Cfjo)
On voit que la fonction de transfert est indépendante de co si Cv = Ce et vaut alors 1/2 . En envoyant
un signal carré à l'entrée, on fait varier Cv jusqu'à la valeur Ce pour laquelle la tension de sortie est
aussi un signal carré sans distorsion.
IV, 2. — Impédance de sortie
Entre les deux bornes de sortie d'un quadripôle (Fig. 6.23), ce dernier se comporte, relativement à
la charge, comme un générateur de Thévenin de f.e.m Auue et d'impédance Zs. L'impédance de sortie
du quadripôle est précisément Zv,
On calcule Zs en passivant la tension d'entrée «g = 0 et en remplaçant l'impédance de charge
par un générateur auxiliaire idéal de tension de f.e.m eg ; ce dernier permet d'exciter les sources liées
et donc de déterminer correctement l'impédance de sortie selon :
zS — —
■ 1
in étant l'intensité du courant débité par ce générateur.
Exemple : mesure de l'impédance de sortie d'un filtre RC passe-bas (Fig. 6.25a)
En passivant la tension d'entrée et en connectant un générateur idéal de f.e.m eg, on obtient
(Fig. 6.25b) :
R
d'où Zs —
— Zc//R —
ZJ/R
1 4" JRCùj
h
R
C
b)
a)
Fig. 6.25.
Fonctions de transfert. Qiiadripôles
201
IV. 3. — Facteurs d'amplification en courant et en puissance
Lorsque le quadripôle débite dans une charge, on introduit, comme pour la tension, les facteurs
d'amplification en courant et en puissance respectivement, selon :
et
P
VP
Le plus souvent, on exprime les facteurs d'amplification en courant et en puissance, en décibel, selon :
G, = 201g A,-
et
Gp = 101g A,,
Dans le langage courant de l'électronique, on désigne par amplificateur, ou plus brièvement ampli, sans autre précision, un quadripôle dans lequel la puissance électrique à la sortie Vs, associée à la tension de sortie us, est supérieure à la puissance électrique à l'entrée Ve, associée à la
tension d'entrée ue (Fig. 6.26). Évidemment, l'énergie étant une grandeur conservative (cf. Thermodynamique), le facteur d'amplification en puissance Vs/Ve n'est supérieur à l'unité que grâce
à des sources auxiliaires d'énergie, lesquelles sont regroupées dans l'alimentation. Un tel quadripôle est donc nécessairement actif-, son gain en puissance 10 ^(7^/7^) peut être positif, contrairement au quadripôle passif. L'intérêt d'un gain positif vient de l'objectif généralement visé pour
un amplificateur qui est d'augmenter la puissance électrique d'un signal. Par exemple la puissance électrique à la sortie d'un microphone est faible, de l'ordre de 1 nW, alors que celle qui
est nécessaire pour faire vibrer une membrane de haut-parleur est bien plus grande, de l'ordre
de 1 W.
«^=1
Microphone
Ampli
HP
Fig. 6.26.
IV. 4. — Classification des amplificateurs
On classe les amplificateurs selon leur fonction amplificatrice ou selon leur domaine spectral.
a) Fonction amplificatrice
L'amplification en puissance est généralement l'objectif d'une chaîne amplificatrice constituée de
plusieurs étages connectés en cascade (Fig. 6.27). Cependant, les fonctions amplificatrices de chacun des étages ne concernent pas nécessairement la puissance. Parfois, on souhaite transmettre une
tension maximale, ce qui exige que l'impédance de sortie d'un étage soit négligeable devant l'impédance d'entrée de l'étage suivant. Si c'est l'intensité maximale que l'on souhaite transmettre, c'est Finverse; l'impédance de sortie de l'étage doit être grande devant l'impédance d'entrée de l'étage suivant.
En fin de chaîne, c'est la puissance maximale que l'on désire généralement transmettre; dans
ce cas, on sait que la résistance de sortie du dernier étage doit être égale à la résistance de la
charge. Signalons que, dans la pratique, on n'hésite pas à s'écarter de cette condition lorsque la dissipation d'énergie dans la résistance de sortie est jugée trop grande et donc dangereuse pour l'ampli.
202
6. Fonctions de transfert. Quadripôles
Pour que le facteur d'amplification en tension de l'ensemble soit le produit des facteurs d'amplification en tension des étages considérés séparément, il faut que la mise en série des amplificateurs ne
modifie pas chacun de ces facteurs. On dit dans ce cas qu'il y a adaptation d'impédance en tension. On
réalise pratiquement cette condition en imposant à l'impédance de sortie d'un étage d'être très faible devant l'impédance d'entrée du suivant. Pour un ensemble de n amplificateurs en tension placés en série,
on a alors :
Au^Alun x ••• x Aup xA^i
V
+
Remarque : Cette adaptation d'impédance est facilement réalisée dans le montage suiveur et plus généralement dans les filtres actifs, munis d'amplificateurs opérationnels (cf. chapitres 8
et 10).
£
—
<?
A
Ue{t)
»
■L<.2
>
.\
m- — -•
•m
U+
#■
Us{î)
Fig. 6.27.
'
.
U-
FlG. 6.28.
On distingue en général trois types d'amplificateur.
i) Les amplificateurs en tension
L'objectif recherché par les utilisateurs de préamplificateurs est la récupération dans les meilleures
conditions de fidélité du signal à transmettre. Les caractéristiques essentielles des préamplificateurs
sont donc leur fonctionnement linéaire avec des gains en tension élevés. Ils sont placés juste après le
microphone qui transforme le signal acoustique initial en signal électrique.
ii) Les amplificateurs en puissance
Ce sont les amplificateurs placés en fin de chaîne, avant le haut-parleur qui transforme le signal
électrique en signal acoustique. Souvent l'amplificateur n'est linéaire que dans le voisinage d'un point
de fonctionnement ; on travaille alors sur des réseaux de courbes de fonctionnement.
iii) Les amplificateurs différentiels
Ces amplificateurs fournissent à leur sortie une tension proportionnelle à la différence de deux
tensions d'entrée (Fig. 6.28) :
us = A^e avec e = «+ —
L'amplificateur opérationnel (cf. chapitre 8) est avant tout un amplificateur différentiel.
b) Classification selon leur fréquence
On classe souvent les amplificateurs selon la fréquence, en trois catégories :
i) les amplificateurs audio qui ont une bande passante comprise entre 20 et 20 kHz ; en téléphonie,
la fréquence maximale ne dépasse pas 3,4 kHz,
ii) les amplificateurs des récepteurs radio dont la bande passante, comprise entre 20 et 20 kHz,
est centrée sur l'onde porteuse dont la fréquence varie typiquement entre 100 kHZ et 100 MHz ; c'est
le cas des ondes radio modulées en amplitude ou en fréquence (cf. chapitre 16),
m) les amplificateurs vidéo dont la bande passante est comprise entre 1 MHz et 10 MHz.
203
Fonctions de transfert. Quadripôles
CONCLUSION
Retenons les points essentiels.
1) Le concept de fonction de transfert suppose que le système électrique considéré soit linéaire,
c'est-à-dire qu'un signal d'entrée, combinaison linéaire de deux signaux, admette comme sortie la même
combinaison linéaire des sorties correspondantes.
2) La fonction de transfert, entre la tension à la sortie et la tension à l'entrée, se met sous la forme ;
H{jo)) = — = T(f) = \T(f)\expj4>
—e
3) On représente le comportement spectral du système à l'aide des diagrammes de Bode, donnant,
en fonction de 1g/, le gain Gu = 201g \T(f ) \ en dB et la phase f . Il est souvent préférable d'introduire
la fonction de transfert normalisée H{x) dans laquelle x désigne la pulsation ou la fréquence réduites
x = (jo/oyc —f/fc , fc = (oc/(27t) étant une fréquence caractéristique.
4) Les filtres passifs ont un facteur d'amplification en puissance inférieur à l'unité et donc un gain
en puissance négatif; ils sont passe-bas, passe-haut, passe-bande ou coupe-bande.
5) Les quadripôles sont caractérisés par une bande spectrale, une impédance d'entrée et une impédance de sortie. Dans une chaîne de quadripôles en cascade, l'influence des éléments placés en aval sur
ceux situés en amont n'est négligeable que si les impédances d'entrées sont très grandes devant les impédances de sortie, typiquement 1 Mfî pour les premières, quelques ohms pour les secondes. Cette
adaptation d'impédance est aisément réalisée grâce aux amplificateurs opérationnels (chapitre 8).
EXERCICES ET PROBLÈMES
P6-1. Filtre passif passe-bas
Le filtre, représenté sur la figure 6.29, est constitué par un résistor (résistance Ri ) en série avec un
ensemble résistor-condensateur (résistance R2 et capacité C2 ).
1. Que devient la fonction de transfert uju^ = H(Joj) = T(f), dans les cas extrêmes des très
faibles et des très grandes fréquences ?
2. Établir l'expression de T{f ) ; on introduira la fréquence particulière /o que l'on exprimera en
fonction des caractéristiques du circuit. Retrouver les valeurs extrêmes précédentes.
3. Dans l'exemple concret où R\ = 15 kfl, R2 = 20 kil et C2 = 15 nF, calculer T{0) et /o .
Quelle est la fréquence de coupure à —3 dB . Tracer les diagrammes de Bode.
R\
R^
C2
Ri
7777
us
C,
7777
Fie. 6.29.
Fig. 6.30.
Ri
204
6. Fonctions de transfert. Quadripôles
P6- 2. Filtre passif passe-haut
Dans le schéma de la figure 6.30, représentant un filtre passif passe-haut, les valeurs des composants
sont R] = 19 kO, #2 = I kfi et C\ = 20 nF.
1. Quelles sont les valeurs de la fonction de transfert H{jco) = T(f) aux fréquences extrêmes?
Justifier la fonction d'un tel filtre.
s
i
2. Etablir l'expression de la fonction de transfert en calculant les deux fréquences caractéristiques.
Représenter les diagrammes de Bode correspondants.
3. La tension à l'entrée du filtre a pour expression iie{t) = ue_mcos{27rfr) avec ue>m = 0.1 V.
Calculer la tension de sortie, successivement pour / =f\ , / — fz et f = (f\
.
P6- 3. Circuit RLC
Un circuit série RLC, constitué d'une bobine, d'un résistor et d'un condensateur (Fig. 6.31), est
alimenté par un générateur de f.e.m e{t) = em cos(27r//) .
1. Trouver la fonction de transfert Hijcd) entre la tension aux bornes du condensateur et la tension
d'excitation ; on introduira la pulsation propre &»o et le facteur de qualité Q.
2. Calculer le gain et la phase pour 0) = cûq , sachant que O = 15 .
C
Us{î)
7777
Fig. 6.31.
P6- 4. Filtre passe-bande RLC
Le filtre RLC, représenté sur la figure 6.32, est constitué d'un condensateur et d'une bobine en parallèle alimentés, à travers un résistor, par un générateur de f.e.m e{t) = em cospTr/r). Le condensateur,
la bobine et le résistor sont caractérisés par la capacité C = 20 nF, l'inductance L = 0,2 H et la résistance /? = 100 li, respectivement.
1. Montrer qualitativement qu'un tel filtre est passe-bande.
2. La fonction de transfert de ce filtre est définie par le rapport Tff) de la tension complexe ^{t),
aux bornes du condensateur et de la f.e.m complexe e(t).
a) Trouver l'expression de Tff).
b) Déterminer la pulsation propre coq de ce filtre, ainsi que le facteur de qualité.
c) Exprimer le gain G et la phase 4> en fonction de la fréquence.
3. Pour quelle valeur de / le gain est-il maximal ? Calculer ce gain maximal. En déduire les fréquences de coupure à —3 dB et la bande passante du filtre ainsi constitué.
205
Fonctions de transfert. Quadripôles
Ri
R
Ci
ft)
T ^
^
o
Ci
KO
£.
R
uft)
c
-X
7777
FlG. 6.32.
7777
FlG. 6.33.
P6- 5. Système à gain uniforme
Un générateur de signaux sinusoïdaux, dont Fimpédance interne Z, est celle Ri d'un résister en
parallèle avec un condensateur de capacité C,, débite dans une charge formée d'un résistor (résistance
/? ) en parallèle avec un condensateur, de capacité variable C (Fig. 6.33).
1. Trouver la fonction de transfert, rapport de la tension aux bornes de la charge sur la f.e.m du
générateur, en fonction de la fréquence. On introduira deux fréquences caractéristiques f et fe que
l'on exprimera à l'aide de Ri, R, Ci et C .
2. Quelle doit être la valeur de C pour que le facteur d'amplification en tension soit indépendant
de la fréquence ? Trouver le déphasage entre la tension à la sortie et la f.e.m. Calculer C et le facteur
d'amplification pour /?, = 50 fi, R = 0,5 kfi et C/ = 0.5 pT.
P6- 6. Filtre de Colpitts
C
S)
Le filtre représenté sur la figure 6.34 est le filtre de E. Colpitts. À l'entrée, un générateur fournit
une tension sinusoïdale, de fréquence /, et, à la sortie, la tension est celle aux bornes du condensateur
de capacité C2 .
1. Montrer, à l'aide de considérations qualitatives, qu'un tel filtre est de type passe-bande.
2. Trouver sa fonction de transfert. On souhaite sélectionner la fréquence /o = 150 kHz avec une
inductance L = 50 mH, une capacité C\ = 40 pF et un facteur de qualité O = 20. Calculer les
valeurs de C2 ei R. Quel est le gain pour f =fo 7
C,
t
R
R
L
KO
C2
7777"
7777
c:
«.(0
7777"
R
7777"
R
c:
7777"
FIG. 6.34.
c:
7777"
7777
7777
Fig. 6.35.
P6- 7. Filtre passif constitué de trois cellules identiques en cascade
Un filtre est constitué par la succession de trois cellules élémentaires identiques RC, comportant
chacune un résistor ( /? = 0,8 kfi ) et un condensateur ( C = 50 nF ) (Fig. 6.35).
1. Déterminer, à l'aide de i? et C, la fréquence caractéristique f\ d'une cellule. Etablir, en fonction de la fréquence réduite x = ///1 , l'expression de la matrice de transfert T d'une seule cellule,
206
6. Fonctions de transfert. Quadripôles
définie comme suit :
X* = [T]Xe
où X est une matrice colonne dont les deux lignes sont respectivement la tension u et l'intensité i du
courant.
2. Quelle est la fonction de transfert H(a:) du filtre constitué des trois cellules identiques ? En
déduire le gain et le déphasage (f) de la sortie par rapport à l'entrée.
3. Déterminer la fréquence / pour laquelle la tension de sortie est en opposition par rapport à
l'entrée. Trouver le gain correspondant.
P6- 8. Filtre passe-bas de Butterworth
Un filtre de Butterworth est un filtre dont le carré du module de la fonction de transfert a pour
expression :
\T(f)\2 =
ï
i + c/y/c)2"
n étant un entier. Le quadripôle, représenté sur la figure 6.36, est un filtre de Butterworth ; il est constitué
de deux bobines inductives, d'inductances respectives L\ et Lj, d'un condensateur de capacité C et
d'une résistance de charge Rc.
1. Montrer que la fonction de transfert de ce filtre peut se mettre sous la forme :
H{X) =
\ + c[(jx) + c2{jx)- + (jxY
x étant la fréquence réduite par une fréquence caractéristique /o que l'on déterminera.
2. Comment faut-il choisir les facteurs cj et C2 pour un filtre de Butterworth d'ordre 3 ? En déduire les expressions de L\ /R et L2/R en fonction de /o . Calculer Lj, C et Rc pour /o = 10 kHz et
L\ =0,5 mH.
3. Tracer les diagrammes de Bode associés à fifx) . Calculer le déphasage introduit par le filtre,
successivement pour x = 1 / \/2, x = \/2 et x = 1 .
Z3 = z,
C
7777
7777
Ffg. 6.36.
R
Z2
X
Ffg. 6.37.
P6- 9. Impédance itérative
Un générateur de tension sinusoïdale alimente un filtre passif symétrique constitué de trois impédances Z\ , Z2 et Z3 = Zj (Fig. 6.37).
{
1. Détenniner, en fonction de Z\ et Z2 , la matrice « ahcd » de transfert du filtre, donnant la sortie
, f } en fonction de l'entrée {ue, ie}.
207
Fonctions de transfert. Qiiadripôles
2. On appelle impédance itérative (qui se répète) Zf celle qu'il faut brancher en sortie pour que
l'impédance d'entrée soit égale à cette impédance de charge.
a) Exprimer Z/ en fonction de Z\ et Z2 . Application au cas où Z\ est l'impédance d'un condensateur de capacité C = 0,5 pJF, Z2 celle d'une bobine non résistive d'inductance L = 20 m H, et où
f =f0 , f0 étant la fréquence de résonance du circuit LC.
b) Exprimer Z,- en fonction de Ze o, impédance d'entrée en sortie ouverte et Zej-, impédance
d'entrée en sortie fermée ou en court-circuit. Quelles sont les valeurs de ces impédances d'entrée pour
f=fo ?
3. On ferme le filtre, à la sortie, à l'aide d'un dipôle d'impédance égale à l'impédance itérative Z,.
On désigne par F le rapport de la tension de sortie sur la tension d'entrée.
a) Montrer que us/Ue = L/L
l'élément a de la matrice « abcd ».
=
^ et en déduire l'équation vérifiée par F faisant intervenir
b) Établir l'équation à laquelle satisfait F.
c) L'analyse du transfert de l'énergie depuis l'entrée jusqu'à la sortie implique une condition, sous
forme d'inégalité, à laquelle doit satisfaire F . Quelle est cette condition ?
d) On souhaite que la transmission du signal s'effectue sans atténuation énergétique. Trouver la
condition sur la fréquence / pour qu'il en soit ainsi.
P6-10. Approche de la fonction de transfert d'un filtre à l'aide de son gabarit
On cherche à approcher la fonction de transfert d'un filtre passe-bas à l'aide de son gabarit, lequel
est caractérisé par les coordonnées suivantes, dans le diagramme de Bode, des points Ai et A2 :
/, = 300Hz
G] = —3 dB
et
^ = 600 Hz
G2 = -l2,3dB
On suppose que la fonction de transfert H(jù)) est caractéristique d'un filtre de Butterworth :
mM)l
'
=
TTW^ÔF
coq étant une pulsation caractéristique et n un entier.
1. Quelle est la valeur de n pour laquelle la fonction de transfert est conforme au gabarit? Même
question pour la fréquence fo = o)Q/{27r).
2. Montrer que, si n = 2,1a fonction de transfert Hfx) peut s'écrire :
UM = j
+ JCiX — C2X2
x étant la fréquence réduite x: —f/fo , C] et C2 deux facteurs positifs que l'on calculera.
P6-11. Filtrage par une suite infinie de cellules identiques
Un système électrique se présente comme une suite infinie de cellules identiques, constituées de
deux composants, d'impédances respectives Zi et Z2 , comme le montre la figure 6.38. La tension à
l'entrée est celle fournie par un générateur de tension sinusoïdale, de fréquence /.
1. Trouver, en fonction de Z\ et Z2 , l'impédance Zq de cette suite entre les deux bornes d'entrée ;
pour cela on remarquera que l'on ne change pas le résultat en ajoutant une cellule à la suite considérée.
208
6. Fonctions de transfert. Quadripôles
2. On désigne par un la tension aux bornes de la cellule de rang n, par m,i+i celle aux bornes de
la cellule ^ + 1 et par in l'intensité du courant dans la branche
.
a) Trouver l'équation reliant
, i_n , i,(+1 et les deux impédances Z\ et Z2.
b) Chercher une solution de la forme : i_n = îman exp(/&>r), a étant un facteur que l'on déterminera.
3. Les impédances Z\ et Z2 de la cellule sont celles respectivement d'une bobine et d'un condensateur : L = 10 mH et C = 5 [xF.
a) Établir la relation entre m,!+| et un en fonction de Z, et Zq . En déduire un en fonction de
Z\ et Zq .
,
b) Montrer que cette ligne infinie de cellules se comporte comme un filtre dont on précisera la
nature et dont on calculera la fréquence de coupure fc.
c) Calculer le gain pour / = 1,5 kHz et n = 5 .
E
K
'
Z2
77^/7
5
r
z
i
7777
L
Z2
C +\/
R
Z2
77^77
1
C
:
7777"
7777
Fie. 6.38.
7777
FlG. 6.39.
P6-12. Relations de Kennely, filtre coupe-bande
Sur la figure 6.39, on a représenté un filtre constitué d'une bobine résistive ( L = 0,1 H,
r = 20 fi ), de deux condensateurs de capacités identiques C = 1 jxF et d'une résistance variable R .
1. A l'aide de considérations qualitatives, montrer qu'un tel filtre est du type coupe-bande.
2. Remplacer le triangle d'impédances ESK par l'étoile correspondante.
3. Établir l'expression de la fonction de transfert. À quelles conditions sur R et sur la fréquence
/, cette fonction est-elle nulle ? Calculer / et R.
P6-13. Filtre passif de Wagner et Campbell
Le schéma de la figure 6.40 représente la structure d'un filtre passif proposé dès 1915 par K. Wagner et G. Campbell. On donne les valeurs suivantes des composants :
= 10 kfi, R^ = 30 kfi,
L = 1 mH, C = 1 |xF.
L Pour un signal d'entrée Ue stationnaire, établir l'expression de la tension de sortie Us.
2. Montrer, à l'aide du théorème de Thévenin, que la fonction de transfert de ce filtre peut se mettre
sous la forme suivante :
H(JÙ)) =
H{0)
2
1 + (jù)) a + (Jco) b + (/Vu)3 c + (/Vu)4 d + (/Vu)5 e
H{0) étant un facteur que l'on déterminera, a, b, c, d, e, cinq coefficients que l'on exprimera en
fonction des quantités suivantes :
ÙJQ =
■j_y/2
LC)
Tr = C
^1^3
Ri ^ R2
et
T[ =
L
Ri + R3
Fonctions de transfert. Quadripôles
209
3. Retrouver le résultat précédent par la méthode des mailles adjacentes, en orientant les mailles
dans le sens horaire.
4. Tracer les diagrammes de Bode correspondants à H{x) en fonction de la fréquence réduite
X = ùi/cOQ .
Rx
L
L
L
i?3
C
FlG. 6.40.
Us
Composants électroniques
On classe généralement les composants électroniques, c'est-à-dire les constituants des circuits électriques, en deux grands groupes :
i) les composants passifs, tels que les résistors, les bobines, les condensateurs et les diodes, déjà
introduits (cf. chapitres 1 et 2), mais aussi les transfonnateurs qui jouent un rôle essentiel dans la distribution de la puissance électrique,
ii) les composants actifs, tels que les générateurs, les amplificateurs opérationnels et les transistors.
Nous nous proposons d'analyser le comportement des composants passifs déjà rencontrés, en précisant les caractéristiques qui les décrivent le mieux, diode et transformateur inclus.
Pour les composants actifs, nous rappelons d'abord les caractéristiques connues des piles et des accumulateurs (cf. Électromagnétisme), puis nous analysons celles des transistors bipolaires et à effet de
champ. Concernant les amplificateurs opérationnels, nous leur réservons une étude spécifique suffisamment exaustive (cf. chapitres 8 et 9).
I. — RÉSISTORS, CONDENSATEURS ET QUARTZ
1.1. — Résistors
Comme nous l'avons déjà vu (cf. chapitres 1 et 2), un résistor, appelé aussi conducteur ohmique,
est un composant qui satisfait à la loi d'Ohm, laquelle exprime la proportionnalité entre la tension aux
bornes d'un dipôle et le courant qui le traverse (cf. Électromagnétisme). Cette relation s'écrit, lorsque
le régime est stationnaire, sous la forme dépouillée U = RI, dans laquelle U représente la tension
entre les bornes A et B , précisément
— Vg , I l'intensité du courant qui le traverse dans le sens A
vers B (Fig. 7.1) ; le coefficient de proportionnalité R est la résistance. En régime quasi stationnaire,
c'est-à-dire dans l'ARQS, cette relation est valable, à chaque instant ; u(t) = Ri(t).
1
R
A^
^B
U
Fig. 7.1.
211
Composants électroniques
Rappelons que pour un conducteur ohmique cylindrique, la résistance est reliée à la conductivité
y du matériau, sa longueur / et sa section S par l'équation (cf. Électromagnétismé) :
R= —
yS
a) Différents types de résistors
On distingue principalement deux types de résistors : ceux qui sont bobinés et ceux dits à couche.
i) Résistors bobinés
Ils sont constitués d'un conducteur, à base de nickel, enroulé autour d'une tige isolante qui est
recouverte d'un émail cuit à haute température. On les utilise comme résistors de précision ou comme
résistors de puissance, car ils peuvent dissiper des puissances électriques importantes, jusqu'à quelques
milliers de watts ; dans ce dernier cas, un diffuseur thermique est indispensable. Comme le bobinage
présente des propriétés inductives, on élimine cet effet parasite en utilisant deux fils bobinés en sens
inverse que l'on connecte en parallèle.
ii) Résistors à couche
Ces résistors sont constitués d'un cylindre isolant en céramique sur lequel on a déposé une couche
de carbone ou de chromure de nickel. On trace alors un sillon en spirale afin d'enlever une partie du
dépôt conducteur. L'ensemble est entouré d'une protection isolante. Leur gamme de valeur est très
étendue : de 1 Û à 10 MO, avec une précision de 2 à 5% . Ils ne sont pas très coûteux (inférieur au
centime d'euro) ; cependant, ils ne peuvent dissiper qu'une puissance inférieure au watt.
b) Valeur nominale et tolérance
Les résistances s'expriment en ohm ( û ) ; leurs valeurs sont comprises entre quelques dixièmes et
plusieurs millions d'ohms. Elles sont généralement données avec une certaine tolérance s définie par :
\R-R„\
R étant la valeur réelle et Rn celle affichée, dite nominale. Les tolérances s'échelonnent de 10% à
moins de 0,1% ; dans la gamme courante, s est compris entre 2 et 5 %.
Généralement, sur la surface cylindrique des résistors sont peints quatre anneaux ; le quatrième
indique la tolérance, le troisième une puissance de dix et les deux premiers le nombre à multiplier par
cette puissance.
Les résistances très précises portent, elles, cinq anneaux : le dernier pour la tolérance, F avantdernier pour la puissance de dix et les trois premiers pour le nombre à multiplier par cette puissance.
Sur le tableau 7.1, on a explicité le code des couleurs universellement adopté.
Exemples :
1) Un résister avec quatre anneaux, orange-orange-brun-or, a une résistance électrique de 33 x
10 = 33011 avec 5% de tolérance.
1
2) Avec cinq anneaux, brun-bleu-vert-rouge-brun, la résistance de 165 x 102 = 16,5 kfl est
donnée avec 1% de tolérance.
La tolérance sur la valeur d'une résistance est une indication impoitante fournie par le constructeur.
En effet, une tolérance de 5% sur une résistance de 1,0 kll signifie que cette valeur est comprise entre
950 fi et 1 050 fi ; aussi de tels écarts doivent-ils parfois être pris en compte dans l'étude d'un circuit.
212
7. Composants électroniques
Chiffre associé
Tolérance associée
Argent
Or
Brun ou Marron
Rouge
Orange
Jaune
0,5%
0,25 %
Violet
0,1 %
Blanc
Tab. 7.1.
Toutes les valeurs des résistances ne sont pas accessibles sur le marché des composants : celles qui
sont disponibles sont d'autant plus nombreuses que la gamme considérée est précise, puisque avec une
précision de 10% , elles doivent être séparées de 20%, alors que pour une précision de l % , elles ne le
sont que de 2% .
Dans la pratique, à chaque précision est associée une série dont le numéro indique le nombre de
résistances par décade : par exemple, la série E12 pour la tolérance 10% et la série E96 pour la
précision 1%. Les valeurs exactes de la série n sont données par l'expression :
Rk = 10k/"
La série E 24, qui est la plus utilisée en électronique, a un dernier anneau doré, ce qui correspond à une
précision de 5 % ; elle comporte 24 valeurs normalisées, comprises entre 10 et 91, soit :
10
11
12
13
15
16
18
20
22
24
27
30
Ainsi la résistance 50 fi n'est pas disponible dans une série standard, mais on trouve des résistances
de 47 fi ou de 51 fi qui encadrent cette valeur, compte tenu de la précision relative de 5 % et donc de
l'incertitude absolue de 2,5 fi.
c) Dissipation nominale d'un résistor
La dissipation nominale d'un résistor est la puissance maximale Vm admissible en régime stationnaire, dans le voisinage de la température ambiante ( 293 K ). Elle est de l'ordre de 0,1 W, ce qui
implique une tension maximale d'utilisation :
f/2
V = —- < Vm
entraîne
U < Um
avec
Um ~
1/2
Le dépassement de Um peut conduire, sinon à la destruction totale du composant, à une forte modification de sa résistance. Il est donc essentiel de respecter la puissance nominale admise par un résistor.
Composants électroniques
213
d) Coefficient de température
La résistance d'un composant ohmique varie avec la température. Pour exprimer ces variations, on
introduit le coefficient de température suivant, homogène à l'inverse d'une température :
_ I R{T)-Ra
T
Ro
T-T0
R{T) désignant la résistance à la température T et Rq la résistance à Tq prise en général égale à
293 K. Pour les métaux ou alliages, il est positif et la résistance augmente lorsque la température
augmente (cf. Électromagnéfisme). Ainsi, il vaut 0,004 K 1 pour la plupart des métaux purs et atteint de très faibles valeurs pour certains alliages tels que le constantan (cuivre-nickel), ou le manganin
(cuivre-manganèse-nickel) dont les coefficients de température sont respectivement : 2 x 10"5 K
et
10-5 K"1 .
Exemples :
1) Entre les froides journées d'hiver à 253 K et les chaudes journées d'été à 303 K, la variation relative de résistance d'une ligne haute tension en aluminium, matériau pour lequel C7- = 4,4 x
10-3 K_l , vaut :
AD
=cvx (r-T-o) =22%
A
Comme les pertes de puissance électrique en ligne sont proportionnelles à la résistance des câbles
(cf. chapitre 2), ces dernières varient aussi de 22% entre l'hiver et l'été.
2) La résistance d'une lampe électrique à incandescence, marquée 100 W, peut être aisément
mesurée avec un ohmmètre. A froid, on a trouvé 40 fl, alors qu'en fonctionnement normal, sous une
tension efficace de 230 V , lorsque la température du filament est 2500 K, cette résistance devient :
R = U2/P = 2302/100 = 529 fi. Le coefficient de température du filament vaut donc :
_ 1
Cr
529 - 40
" 40 2500- 293
-3 tr-l
5,5 x W
K
Remarque : Les résistons sont sensibles à l'humidité, ainsi qu'aux déformations mécaniques ; en outre,
ils sont caractérisés par un bruit thermique ou bruit Johnson (cf. chapitre 17).
1.2. — Condensateurs
On sait qu'un condensateur est constitué de deux armatures métalliques (surface S) séparées par
un isolant, d'épaisseur e et de permittivité relative e,- (cf. Électromagnétisme). Sa capacité a pour
expression :
_
£06 rS
Comme la constante eo est très faible ( 8,85 10 12 SI ), les capacités usuelles sont très faibles, précisément comprises entre quelques mF et une fraction de pF.
Il existe principalement trois familles de condensateurs classées selon la nature des isolants utilisés
et donc selon la technique de fabrication. Ces isolants sont soit des céramiques, soit des films plastiques,
soit des couches d'oxyde métallique obtenues par électrolyse.
214
7. Composants électroniques
a) Différents types de condensateurs
Les condensateurs à céramique sont formés d'empilements successifs de couches métalliques et
isolantes comprimées d'épaisseur 20 pm environ. La constante diélectrique relative sr de l'isolant
étant comprise entre 10 et 10000, la capacité de ces condensateurs varie entre 1 pF et 1 /xF.
Les condensateurs à films plastiques sont constitués de quatre couches (métal-diélectrique-métaldiélectrique) enroulées ; le diélectrique est un film plastique, d'épaisseur 20 pm environ, dont la permittivité électrique relative est comprise entre 2 et 4 . l'ensemble est entouré d'un isolant. Leurs capacités
sont comprises entre 100 pF et 10 [jlF . Ils se présentent sous forme de cylindre, dont la longueur varie de quelques millimètres à quelques centimètres.
Dans les condensateurs électrolytiques, le diélectrique utilisé est une couche d'alumine {£r = 9 )
ou d'oxyde de tantale ( er = 21) déposée par électrolyse sur une feuille d'aluminium ou de tantale pur.
L'électrolyte qui imbibe un papier forme la seconde armature. L'épaisseur étant inférieure au micromètre
et les surfaces en regard de l'ordre du mètre carré, les condensateurs obtenus sont de forte capacité,
comprise entre 1 pF1 et 1 mF. Ces condensateurs électrolytiques sont polarisés et caractérisés par
une tension inverse maximale d'environ 1,5 V et un courant inverse maximal, au-delà desquels leurs
propriétés sont altérées. On les utilise le plus souvent pour polariser les composants actifs tels que les
transistors et pour maintenir sous tension les mémoires pendant de courtes durées. Ils présentent un
inconvénient : l'intensité des courants de fuite peut atteindre 1 jxA par jxF.
b) Caractéristiques des condensateurs
La valeur de la capacité d'un condensateur est parfois exprimée avec un code de couleur analogue
à celui employé pour les résistors, mais le plus souvent, elle est directement inscrite sur le composant.
La tolérance sur la valeur de la capacité varie entre 50% pour les condensateurs électrolytiques et 1%
pour ceux constitués de multicouches à céramique.
La tension nominale d'un condensateur est la tension efficace maximale que l'on peut appliquer
entre ses bornes sans le détériorer ; elle est en général de quelques centaines de volts. Au-delà, le diélectrique peut devenir conducteur, c'est le claquage.
c) Représentation électrique d'un condensateur réel
Chargeons un condensateur à céramique, de capacité C = 0,1 pF, avec une pile de 9,0 V, et
étudions l'évolution de la tension à ses bornes, une fois la pile déconnectée. La mesure effectuée à l'aide
d'un voltmètre à haute impédance d'entrée ( 1012 fl ) donne, immédiatement après le débranchement,
uc{0) = 9,0 V ; cependant on constate que le condensateur se décharge, même en circuit ouvert. En
effet, trois minutes après, la tension obtenue n'est plus que de iic{t\) = 5,74 V ; après six minutes, elle
tombe à iiciti) = 3,66 V et, après neuf minutes, elle ne vaut plus que udh) = 2,33 V . Ainsi :
»c(0) _ «cfe) _ uçjh)
uc{0)
Mc(ri)
uciti)
mc(L) _ »c(o)
«c(0)
Uc(0)J
et
ln[Mc(/3)/nc(0)] _ ^
ln[McOi)/wc(0)]
ce qui représente précisément le rapport des durées t^/ti . La chute de tension n'est donc pas proportionnelle à la durée de décharge, mais au logarithme de cette durée ; on en déduit que la décharge suit
une loi d'évolution, selon une exponentielle décroissante du temps. Comme cette loi est celle de la décharge d'un condensateur dans un conducteur ohmique (cf. chapitre 4), on représente le composant par
l'association d'une capacité C en parallèle avec une résistance de fuite Rf (Fig. 7.2a).
Cette résistance est en général de plusieurs milliers de MO ; la durée de décharge r = RfC est
donc très longue. Dans l'exemple précédent, on trouve :
= exp (
'O
)
d'où
t= —
_
ln[n(/|)/M(0)]
180
= 400 s
ln{5,74/9)
R. = 4x10'11
Composants électroniques
215
C
JCù)
s'
R,
mr
b)
a)
FIG. 7.2.
On traduit souvent cette imperfection du condensateur en introduisant l'angle de perte 8 suivant,
défini à partir de l'admittance Y du composant (Fig. 7.2b) :
tan 8 =
Re{F}
l/Rf
1
lm{F}
Cto
RfCto
Cet angle tend vers zéro lorsque Rf est très grand devant 1 /(Cù)) . Dans l'exemple précédent,
tan5 = 1/(80077/) ; on peut le négliger dès que la fréquence dépasse quelques Hz, en pratique
dès que le régime d'utilisation est variable.
1.3. — Quartz
La piézo-électricité, découverte en 1881 par les physiciens français Pierre et Paul Curie, tous deux
frères, est l'apparition d'une polarisation de certains corps, tels que le quartz, lorsqu'on les soumet à une
contrainte mécanique. Les oscillations mécaniques d'un cristal de quartz sont donc accompagnées d'oscillations électriques. En raison de la grande stabilité de sa période d'oscillation, le quartz s'est imposé
comme résonateur dans toutes les horloges et dans de nombreux filtres à bande passante très étroite.
Leur fréquence propre varie, selon la nature de la déformation (flexion, élongation ou cisaillement), de
quelques kHz à 200 MHz.
Sur la figure 7.3, on a représenté le symbole et le schéma électrique équivalent à un quartz ; aussi
son impédance s'écrit-elle :
Z=
i/ijCoù)) \jLsùj + 1 /(jCsù))]
jLso) + 1/{jCs(o) + 1/{JCqco)
1 - LsCsù)2
2
jo){Cs -F Co)(l — LsCeo) )
avec
C.
Cs-Cq
Ce -F Cn
En introduisant les pulsations caractéristiques m] — l/(LsCs) et o)2e = \/{LsCe), Z se met sous la
forme :
1 - ù)2lùrs
Z =
j(t){Cs -F Co)(l - ù>2/û)1)
Pour un quartz d'horlogerie, de fréquence 32768 Hz = 215 Hz, on peut relever, sur la notice du
fabricant, les valeurs suivantes :
Cq = 1,5 pF
Cs = 3 f F(= 3 x 10~15 F)
et
Ls = 1879 H
D'où les fréquences fs = 32736 Hz et fe = 32768 Hz
La figure 7.4 représente la courbe donnant le module de Z en fonction de la fréquence. L'impédance est purement imaginaire et son signe indique que le quartz a un comportement capacitif pour
/ < fs et / > /è, et inductif entre fs et fe. Pour f = fs, l'impédance est nulle, tandis que si f =fe,
l'impédance tend vers l'infini.
Notons que, fs et fe étant très proches, le comportement inductif n'est observable que sur une
gamme de fréquence très étroite (fe — fs = 32 Hz). Dans ce domaine spectral, l'impédance varie
très rapidement avec la fréquence, ce qui est mis à profit pour réaliser des oscillateurs très stables en
fréquence (cf. chapitre 14).
7. Composants électroniques
216
a)
J
b)
FlG. 7.3.
k
/
Fig. 7.4.
II. — BOBINES ET TRANSFORMATEURS
Les bobines sont des composants généralement encombrants, coûteux et lourds. Dans la plupart
des circuits électroniques actuels, on les remplace par d'autres composants, notamment par des systèmes à amplificateurs opérationnels qui permettent de les simuler (cf. chapitre 8). En revanche, les
transformateurs, qui sont constitués de deux bobines en interaction, restent des composants essentiels,
principalement dans le transport de la puissance électrique, après sa production et avant son utilisation.
II. 1, — Bobines
a) Les différents types de bobines
Les bobines sont constituées d'un fil de cuivre gainé enroulé sur un support cylindrique. En raison
de la longueur importante du fil, on utilise souvent un vernis isolant. La valeur de l'inductance est
proportionnelle à la section de l'enroulement et au carré du nombre de spires (cf. Electromagnétisme).
Pour une bobine en forme de solénoïde long et rectiligne, de longueur /, de rayon R , avec n spires par
unité de longueur, l'inductance a pour expression :
L = p()7rR2n2l = 47r2 x 10
1
R2n2l
Notons que l'inductance d'une bobine à air est très faible, puisque, pour les valeurs typiques
n = KF m-1 , R = 2 cm et / = 6 cm, la valeur calculée n'est que de 0,1 mH environ. Aussi
est-il souvent nécessaire d'introduire un matériau ferromagnétique dans l'enroulement.
Avec un noyau de fer doux, on obtient des inductances bien plus élevées. En effet, l'inductance initiale de la bobine est alors multipliée par la perméabilité relative p,, laquelle est de l'ordre de 1 000
(cf. Electromagnétisme). Cependant, la masse du composant augmente fortement ; en outre le composant perd sa propriété de linéarité.
Dans les bobines à noyaux de ferrite, le fer doux est remplacé par un isolant de grande pennéabilité
relative, typiquement 5 000, par exemple l'oxyde mangano-ferreux. L'intérêt principal est une grande
valeur de l'inductance pour des dimensions comparables à celles des résistances ou des condensateurs.
Cependant, ces composants étant fortement non linéaires, on ne doit les utiliser que pour de faibles
variations de courant.
217
Composants électroniques
b) Représentation d'une bobine
La résistance d'une bobine n'est jamais nulle, car le fil conducteur de l'enroulement est généralement fin et long. C'est ce que confirme une mesure effectuée avec un ohmmètre : on trouve plusieurs
ohms. Par exemple, pour une bobine de 500 spires, d'inductance 10 mH, l'ohminètre indique une résistance r « lOO. Une bobine réelle est, par conséquent, bien représentée par l'association en série
d'une bobine idéale d'inductance L et d'un résister de résistance r (Fig. 7.5a).
z
'^
L
8
jLco
L
C
b)
a)
FIG. 7.5.
Fig. 7.6.
À basse fréquence, l'impédance de la bobine est due principalement à la résistance du fil, Lco ayant
alors une contribution beaucoup plus faible. Cette imperfection est caractérisée par un angle de perte,
défini à l'aide de l'impédance Z du composant (Fig. 7.5b) :
tan ô =
Re{Z}
r
Im{Z}
Lco
Notons que cette définition est différente de celle relative aux condensateurs, afin que l'angle de
perte croisse avec les imperfections. Dans les bobines supraconductrices (cf. Electromagnétisme), pour
lesquelles la résistance a disparu, l'angle de perte est nul.
A haute fréquence, des effets capacitifs apparaissent entre les spires ; aussi ajoute-t-on au modèle
précédent une capacité en parallèle avec L et r (Fig. 7.6).
Exemple : à haute fréquence, on constate qu'une bobine comportant une dizaine de spires
non jointives, d'inductance 0, 1 mH, se comporte comme un circuit résonnant de fréquence propre
/o = 1,5 MHz ; on en déduit aisément sa capacité parasite par (cf. chapitre 3) :
1
/o =
,
277-(LC) /2
d'où
C=
1
2
47r L/02
= 0. llnF
II. 2. — Transformateurs
Comme son mode de fonctionnement s'appuie sur le phénomène d'induction électromagnétique,
un transformateur ne concerne que les régimes variables, le plus souvent sinusoïdal ; une tension variable
aux bornes du primaire crée un courant, lequel produit, dans le circuit magnétique, un champ magnétique
dont la variation induit une tension aux bornes du secondaire (cf. Electromagnétisme).
Ils doivent leur nom à leur capacité à modifier l'amplitude de la tension sinusoïdale délivrée par
un générateur, ce qui est à l'origine du rôle essentiel qu'ils jouent dans le transport de la puissance
électrique ; en effet, cette dernière est produite par les alternateurs, couplés aux centrales électriques,
sous une tension sinusoïdale efficace d'environ 25 kV , laquelle est transformée en une très haute tension
de 400 kV avant le transport, car la puissance dissipée par effet Joule dans les fils conducteurs est alors
bien plus faible (cf. chapitre 2). En fin de transport, des transformateurs abaisseurs de tension réalisent
la distribution domestique de la puissance électrique sous 230 V .
7. Composants électroniques
218
a) Description
Sur le circuit électrique d'un appareil photographique jetable, on reconnaît aisément un transformateur placé à coté d'un condensateur destiné à alimenter le flash. Une pile de f.e.m E = 1.5V alimente un circuit oscillant RLC siège d'oscillations de tension dont l'amplitude est fortement amplifiée
grâce à ce transformateur. Après redressement et filtrage de cette tension, le condensateur, de capacité C , est chargé jusqu'à une tension stationnaire de l'ordre de 200 V . Aussi est-il déconseillé d'ouvrir ce type d'appareil, sans précaution, car le condensateur chargé peut provoquer, en se déchargeant
dans le corps, un choc électrique dangereux.
Si, une fois le condensateur déchargé, on démonte ce transformateur, on distingue sur une carcasse
métallique deux enroulements : l'un, très fin, d'environ 1 000 spires, l'autre, de diamètre plus grand,
formé d'une dizaine de spires.
De façon générale, un transformateur est constitué de deux bobinages couplés, appelés respectivement enroulement primaire, ou plus simplement primaire, et enroulement secondaire ou secondaire. Le
couplage s'effectue par l'intermédiaire d'un circuit magnétique (Fig. 7.7). En général, les fils des enroulements, sont en cuivre ou, au besoin, en aluminium plus léger. Ils sont comprimés lors du montage
et parfois imprégnés de résine afin de résister aux effets des forces de Laplace (cf. Électromagnétisme).
Les carcasses sur lesquelles sont enroulés le primaire et le secondaire sont souvent des tôles en
alliage fer-nickel, fer-cobalt ou fer-silicium, d'épaisseur de Tordre de 0,1 mm, isolées les unes des
autres par un vernis afin de limiter les courants de Foucault.
e~
No
c1
Fie. 7.7.
b) Propriétés du transformateur idéal
Le transformateur peut être considéré comme un quadripôle (cf. chapitre 6) : deux homes au primaire et deux autres au secondaire. Pour un transformateur idéal, c'est-à-dire sans pertes, le facteur de
proportionnalité entre les tensions sinusoïdales aux bornes du secondaire et du primaire est égal au rapport n du nombre de spires du secondaire et du primaire (cf. Électromagnétisme).
uijf)
Ni
m (t)
Âfl
Comme le transfonnateur est un composant passif, la puissance électrique maximale que peut fournir le
secondaire est celle reçue au primaire. Il en résulte qu'en régime établi, pour un transformateur idéal, le
facteur de proportionnalité des courants est égal à T opposé de l'inverse du rapport du nombre de spires :
"FV, i = Mi(/)ri(ï) = Vf,2 = —donne
l(0
Ng
*i (0
N2
1
Composants électroniques
219
Notons que les courants doivent être convenablement orientés pour que la relation soit algébriquement
satisfaite. Sur la figure 7.8a, on a précisé cette convention : si les courants pénètrent par les points, les
flux s'ajoutent ; en 7.8b, on a représenté le symbole du transformateur.
Retenons que, si
> iVi , le transformateur élève la tension et abaisse l'intensité du courant,
et notons que le transformateur est un composant réversible, c'est-à-dire qu'il est possible d'inverser
primaire et secondaire.
'■
a)
b)
FIG. 7.8.
c) Utilisation du transformateur en adaptateur d'impédance
En utilisation normale, la tension d'alimentation est connectée aux bornes du primaire et le secondaire est fermé sur une charge (Fig. 7.9). Au primaire, le transformateur et sa charge sont équivalents à
une seule charge dont les caractéristiques dépendent du rapport de transformation et de la charge réelle.
En régime sinusoïdal et en notation complexe, nous avons les relations suivantes :
—2 —
^ —2
n kL\
u
U.2
et
12 = —
d'où
n
LL\
et
ii
.z
rÏ2
Ainsi l'ensemble équivaut au primaire à une charge d'impédance :
De même, au secondaire, le transformateur et son alimentation sont équivalents à un dipôle dont les caractéristiques dépendent du rapport de transformation et de l'alimentation. Ainsi, pour un générateur de
tension, de f.e.m e et d'impédance interne Z,, le générateur équivalent, vu du secondaire, est caractérisé par un générateur de tension, de f.e.m ne et une impédance interne «2Z/.
12
•X
«1
112
y
\
Fig. 7.9.
Exemple : on souhaite alimenter, à l'aide d'un GBF, une lampe qui fonctionne habituellement sous une tension 4,5 V et consomme une puissance de 1,35 W. Sa résistance est donc
R — U1 jV = 4,52/l,35 = 15 H. Le branchement direct de la lampe sur le GBF, de f.e.m 15 V
et de résistance interne 50 D, ne donne qu'un très faible flux ; on constate, en outre, que le générateur s'échauffe rapidement. Calculons la puissance dissipée dans la lampe et dans la résistance interne
du générateur ; il vient, puisque / = 15/(50 + 15) = 0.23 A, respectivement :
-Pt^RÎ2 = 0,19^
et
Vg = Rf2 = 2,64 W
220
7. Composants électroniques
Dans ces conditions ou R < Ri, on dit que la charge n'est pas adaptée à l'alimentation. Cette adaptation peut être réalisée à l'aide d'un transformateur, placé entre le GBF et la lampe, de rapport de transformation n — 1/2. En effet, dans ces conditions, le générateur débite dans une charge, qui n'est pas
R, mais R/n2 = 60 H ; la lampe semble alimentée par un générateur de f.e.m 15 x n = 7,5 V et de résistance interne 50 x n2 = 12,5 D. Les puissances dissipées dans la lampe et dans la résistance interne
du GBF sont alors, respectivement :
Vi
Rîl = 15x
7,5
12,5 + 15
1,1 W
et
Vg = Rj]
r. 7*7
RiUly
=
7,5
50
12.5 + 15
= 0, 9 W
Ainsi, l'introduction du transfonnateur réalise l'adaptation d'impédance en récupérant un maximum de
puissance du générateur (cf. chapitre 1).
d) Transformateur d'isolement
Lorsque le rapport de transformation n est égal à l'unité, le transformateur ne modifie pas l'amplitude de la tension aux bornes du secondaire, mais présente l'avantage d'isoler le circuit de la source
d'alimentation. Montrons l'intérêt du transformateur d'isolement sur un exemple.
Exemple : dans le circuit RLC de la figure 7.10, visualiser simultanément sur un oscilloscope, la
tension ur aux bornes du résistor et la tension tic aux bornes du condensateur pose problème, car le
GBF et l'oscilloscope sont alimentés par le secteur et possèdent, par construction, une liaison entre leur
masse et la prise de terre. Grâce au transformateur d'isolement, la tension qui alimente le circuit RLC
n'a plus de potentiel imposé et le montage est réalisé sans court-circuit.
Voie 1 de l'oscilloscope
GBF
Transformateur
d'isolement
Fie. 7,10.
Voie 2 de
l'oscilloscope
e) Alternostat
Dans un alternostat, il n'y a qu'un seul enroulement qui sert à la fois d'enroulements primaire et
secondaire. L'enroulement secondaire est parfois à prise variable : en modifiant son nombre de spires,
on fait varier la tension de sortie (Fig. 7.11). En outre, le nombre de spires dans le secondaire peut être
plus élevé que dans le primaire.
Notons que, les circuits primaire et secondaire étant confondus, les alternostats n'assurent pas
d'isolement électrique, ce qui présente un danger en cas de branchement sur la tension du secteur. En
effet, on peut voir sur la figure 7.11 qu'une permutation du neutre et de la phase, à l'entrée connectée au
secteur (230 V ), donne une faible tension en sortie entre les conducteurs (par exemple U2 = 50 V),
mais le fil de connexion commun est alors porté au potentiel de la phase.
En revanche, avec un transformateur d'isolement, tout danger est écarté, puisqu'entre la terre et
l'un des deux fils du secondaire les circuits ne sont jamais fermés. On peut permuter sans danger neutre
et phase dans le primaire.
221
Composants électroniques
Phase
fi
o__
g-
Ml
Neutre
\U2
it
FlG. 7,11.
f) Transformateur réel
Sur un transformateur réel, on lit les indications suivantes fournies par le constructeur pour un
fonctionnement optimal : 50 Hz ; 230 V ; 12 V ; 60 VA , ce qui signifie que :
i) le transformateur doit être alimenté par une tension sinusoïdale, de fréquence 50 Hz et de valeur
efficace U\ = 230 V,
ii) la tension de sortie, elle aussi sinusoïdale et de fréquence 50 Hz, a pour valeur efficace
[72 = 12 V ,
iii) enfin que la puissance apparente 6" — Uih vaut 60 VA .
On en déduit l'impédance de la charge selon :
^ = ^ = 25H
<S
60
Notons que la puissance dissipée dans le circuit secondaire ne sera égale à 60 W, que si le facteur de
puissance ( cos (p) de l'installation vaut 1 (cf. chapitre 2).
Le modèle du transformateur idéal n'est qu'une première approximation du transformateur réel car,
il faut prendre en compte les différentes pertes de puissance :
i) pertes Vt dans les bobinages, par effet Joule,
ii) pertes de fer Vf, dues à la fuite des lignes de champ magnétique, aux courants de Foucault crées
par induction dans le circuit magnétique, à l'hystérésis magnétique attribuée au processus microscopique
de magnétisation (cf. Électromagnétisme).
Le rendement d'un transformateur est naturellement défini par le rapport des puissances, secondaire
sur primaire :
r= ^
Vi
avec
V\ — V2 V Vt, d- Vf
±
»
j
soit
r—
V2
+
Vf
+ Vb
Les transformateurs actuels ont des rendements très élevés, supérieurs à 95 % .
Exemple : sur la fiche technique d'un transformateur 400 V/24 V, on peut lire les valeurs nominales suivantes : 10 kVA, rendement 95 %, cos (pj = 0.80 et pertes fer 120 W . On en déduit les
pertes de bobinage :
Vh=
V2
r
V2 — Vf
J
avec
TV = S cos ^9 = 10x0,8 = 8,0 kW
d'où
Vt, = 300 W
Remarque : Pour limiter les pertes par courants de Foucault, les carcasses métalliques sont formées
de tôles très fines isolées les une des autres. Ce sont les vibrations de ces tôles qui sont
responsables du ronronnement bien connu des transformateurs. A haute fréquence, on
préfère utiliser des carcasses en ferrites, car ces dernières ne sont pas conductrices.
222
7. Composants électroniques
III. — DIODES SEMICONDUCTRICES ET THYRISTORS
III. 1. — Diodes à jonction
Comme nous l'avons déjà vu, la diode semiconductrice est un composant passif non linéaire qui
se comporte comme un interrupteur ouvert ou fermé selon le sens du courant ou de la tension (cf. chapitre 1). Nous nous proposons d'analyser le comportement de ce composant de façon plus détaillée.
Nous n'étudierons que les diodes semiconductrices car les diodes à vide, constituées d'une cathode
chauffée et d'une anode métalliques placées dans une ampoule vidée d'air, ne sont pratiquement plus
utilisées.
La diode à jonction est constituée de deux zones adjacentes d'un semiconducteur dopées différemment, p pour l'une et n pour l'autre (cf. Electromagnétisme), d'où son nom. Le côté dopé n est
la cathode repérée sur le composant par un anneau rouge ou blanc; le côté p est Vanode. Sur la figure 7.12, on a représenté la structure du composant et son symbole.
P
n
Symbole
FlG. 7.12.
a) Approche expérimentale
Traçons la caractéristique I{U) d'une diode au silicium typique, de référence 1N4001,en utilisant
un ordinateur muni d'une interface. La courbe obtenue, représentée sur la figure 7.13 pour des tensions
comprises entre 0 et 0,8 V, a l'allure d'une exponentielle, ce que l'on pourrait confirmer en traçant
le graphe In /, en fonction de U . On constate que, pour {/ > 0, 60 V , l'intensité qui est de quelques
dizaines de milliampères croît très rapidement.
/(mA)
4020-
0.1
0,3
U(W)
—**■
0,5
FlG. 7.13.
b) Fonctionnement en sens direct
Si la tension appliquée entre l'anode et la cathode de la diode est positive, la diode est connectée
en direct. Une analyse expérimentale soignée montre que l'équation de la caractéristique peut se mettre
sous la forme approchée suivante :
h exp
( U
—
\Ut
- 1
Is étant l'intensité du courant de saturation qui est de l'ordre de quelques dizaines de nanoampère, ce
qui est très faible. L'intensité / n'est donc significative que si la tension est supérieure à une certaine
tension de seuil Ud ■ Au-delà de U(i, la diode fonctionne en régime passant.
Composants électroniques
223
Conventionnellement, on définit Uj par la tension pour laquelle l'intensité du courant est égale à
1 mA . Avec la fonction « test diode », les multimètres, qui se comportent alors comme des générateurs,
de courant de c.e.m X = 1 mA , affichent la valeur b'd de la tension qui apparaît aux bornes de la diode.
Ordres de grandeur : £/</ « 0.6 V pour les diodes au silicium, Uci ^ 0.3 V pour celles au
germanium et
^ 1,1 V pour celles en alliage d'arséniure de gallium.
Cette équation s'interprète en prenant en compte courants de conduction et courants de diffusion
(cf. Électromagnétisme et Thermodynamique) ; ce dernier devient prépondérant et augmente exponentiellement lorsqu'on fait croître U . Quant à Uj , c'est une tension proportionnelle à la température absolue T : Ut = knT/e où e = 1,6 x 10"19 C est la charge élémentaire et A:g = 1,38 x 10-23 J • K_l
la constante de Boltzmann. Pour T — 300 K, kgT ïz 0,025 eV et donc Uj ~ 25 mV .
Remarques : 1) Le courant Is est fonction des paramètres géométriques de la diode et des dopages et
on donne parfois l'expression suivante, plus précise de î{U) :
I=L
dans laquelle A est un facteur positif compris entre 1 et 2 qui dépend du matériau et de
la géométrie de la jonction. Le plus souvent, A est pris égal à 1.
2) La tension de seuil est parfois notée Us, notation que nous avons écartée pour éviter
tout risque de confusion avec la tension de sortie des montages, en régime stationnaire.
L'intensité Is varie avec la température selon :
h ~ AT3 exp (—
où Si est l'énergie d'ionisation du semiconducteur (elle vaut 1,1 eV pour le silicium) et A un coefficient numérique qui dépend de Injonction ; îs augmente très rapidement avec T . En effet, il vient, en
calculant la dérivée de Is par rapport à T :
3/4 T2 exp
— ATexp Ç-J^P
ke
V kBT
•y
ce qui donne, pour le silicium, à X = 300 K , A/j/A = 0,15 AX . Ainsi, l'intensité Is est multipliée par
deux tous les 7 K environ pour une diode au silicium. Un risque d'emballement thermique existe, puisqu'une augmentation de ls entraîne celle de I, laquelle peut provoquer une élévation de température et
donc une nouvelle augmentation de îs. Afin d'éviter cet enchaînement thermique qui peut conduire à la
destruction de la diode, les constructeurs donnent généralement la puissance maximale qui peut être dissipée à température ambiante ou le courant maximal correspondant.
c) Fonctionnement en inverse
Lorsque la diode fonctionne en inverse, la tension U est négative dans l'expression de la caractéristique î{U). Dès que \U\ devient inférieure à quelques dixièmes de volt, le terme exponentiel est
négligeable. Il en résulte que I ~ —Js avec A ~ 10 nA .
On ne doit pas donner à |f/| une valeur trop importante, car, au-delà d'une certaine tension de
claquage le courant augmente exponentiellement et détruit le composant. En effet, les porteurs de charge
assurant la conduction acquièrent suffisamment d'énergie pour ioniser les atomes lors des chocs ; les
électrons arrachés, à leur tour, ionisent d'autres atomes : c'est Vavalanche qui conduit à la destruction
de la diode. La zone de la caractéristique pour laquelle I = —Is est donc assez limitée puisque les
prémisses de l'effet d'avalanche viennent se superposer à A dès que \U\ dépasse quelques volts. Les
tensions de claquage des diodes varient de quelques volts à 1 000 V pour les diodes de redressement.
224
7. Composants électroniques
d) Schéma électrique équivalent à une diode
Comme nous l'avons déjà vu (cf. chapitre 1), il existe différentes représentations d'une diode,
suivant la zone de la caractéristique considérée et du niveau d'approximation souhaité.
On retrouve la caractéristique de la diode idéale en négligeant le courant inverse, ainsi que la
tension de seuil, et en assimilant l'exponentielle à une droite parallèle à Taxe des intensités, dès que le
courant n'est plus négligeable. Le composant est alors équivalent à un interrupteur : coupe-circuit pour
f/ < 0 et court-circuit pour U > 0 (Fig. 7.14a).
Si l'on tient compte de la tension de seuil, et que l'on assimile l'exponentielle à une droite faiblement inclinée par rapport à l'axe des intensités, la diode est un coupe-circuit tant que U < Ud ■ Pour
U > Ud , elle se comporte comme un générateur en opposition, de f.e.m Ud , en série avec sa résistance interne (Fig. 7.14b).
On affine la représentation de ce composant, en introduisant une capacité parasite, de l'ordre d'une
dizaine de picofarads, placée en parallèle avec le générateur de f.e.m Ud ■ La valeur de cette capacité
est généralement donnée par le constructeur.
n
Ia
Régime passant
Régime passant
0
0
U
Régime bloqué
U
Régime bloqué
a)
b)
Fig. 7.14.
e) Hyperbole de puissance
Les diodes ne peuvent dissiper qu'une puissance limitée, spécifiée par le constructeur, comprise
entre quelques dixièmes de watt et plusieurs dizaines de watts. Il en résulte que, dans le plan de la
caractéristique, les points de fonctionnement, pour lesquels la puissance dissipée est inférieure à la
valeur maximale Vm , sont situés sous l'hyperbole d'équation I = Vm/U.
III. 2. — Autres types de diode
a) Diode Zener
Lorsque l'une des deux zones de la jonction est fortement dopée, apparaît, pour une tension inverse
supérieure à une valeur seuil Uz, une forte augmentation de l'intensité du courant, pratiquement indépendante de U (Fig.7.15a). C'est l'effet Zener, découvert par le physicien allemand C. Zener, en 1934 ;
on l'interprète par le passage des électrons de la bande de valence à la bande de conduction, par effet tunnel, sous l'action du champ électrique intense qui règne dans le matériau (cf. Quantique). Le
symbole de la diode Zener est représenté dans un coin de la figure 7.15a.
Il existe des diodes avec des tensions Zener comprises entre 1 V et quelques dizaines de volts. On
représente souvent la diode Zener, en inverse, par un générateur de tension en opposition, de f.e.m Uz
(Fig. 7.15b).
Composants électroniques
225
/'
t,
Uz
'u
2
1<0
1
— Uz
u(l
U
3
u
4
b)
a)
Fie. 7,15.
b) Diode Schottky
Les diodes Schottky (Fig, 7.16a), qui portent le nom du physicien américain W. Schottky qui les
a réalisées et étudiées, sont constituées d'un métal et d'un semiconducteur, silicium ou arséniure de
gallium, faiblement dopé. L'allure de la caractéristique est identique à celle des diodes classiques, mais
la tension de seuil est plus faible : 0,3 V ou 0.4 V ; en revanche, le courant inverse de saturation est
bien plus élevé, de l'ordre de quelques microampères.
Le grand intérêt de ces composants vient de leur capacité parasite Cp très faible (inférieure à
1 pF ), ce qui permet d'obtenir une durée de commutation très courte entre l'état bloqué et l'état conducteur : 0,1ns pour la diode Schottky AAS70-04 au lieu de 30 p.s pour la diode classique 1N4001. C'est
la raison pour laquelle on les utilise dans la réalisation des portes logiques (cf. chapitre 18).
c) Diode varicap
Lorsque les diodes sont polarisées en inverse, leur capacité parasite Cp dépend de la tension inverse
U appliquée. Dans les diodes varicap, la géométrie et le dopage sont choisis de telle sorte que cette
dépendance soit de la forme :
K
C,,
IC/I'/2
K étant un coefficient homogène au produit d'une capacité par la racine carrée d'une tension. Ces
diodes sont alors utilisées comme condensateurs, dont la capacité est commandée par la tension appliquée en inverse, d'où leur nom. Elles permettent d'accorder de façon précise la fréquence de résonance
de filtres utilisés en radio et en télévision. Les valeurs usuelles de ces capacités vont de 1 pF à quelques
centaines de picofarads.
Sur la figure 7.16, on a représenté les symboles de la diode Schottky et de la diode varicap.
n
Diode Schottky
11b)
a)
Fig. 7.16.
III. 3. — Applications des diodes
Il existe de nombreuses applications des diodes qui seront illustrées ultérieurement sur différents
montages. Nous proposons ici uniquement trois applications essentielles : le redressement d'une tension
alternative, la stabilisation d'une tension redressée et l'écrétage d'une tension.
7. Composants électroniques
226
a) Redressement
Une diode, soumise à une tension sinusoïdale, est bloquée pendant l'alternance négative et passante
durant l'alternance positive. Avec le montage représenté sur la figure 7.17, pour lequel R = 100 -Q ,
on peut réaliser le redressement à simple alternance de la tension e{t) = em cos(wr) délivrée par un
générateur sinusoïdal GBF d'amplitude 10 V .
eiî)
Us{tj i i
L\J\
FIG. 7.17.
Contrairement au signal d'entrée, le signal de sortie ^(f) a une valeur moyenne non nulle. Calculons cette valeur, en négligeant la tension seuil de la diode. A la sortie, la tension redressée a pour
expression, T = Itt joj étant la période ;
us{t) = emcos{ù)t)
pour
?
T
^ ^
et
3T
us{t) = 0
pour
T
3T
— < r^ —
On en déduit :
u
s{t) = -
/■r/4
fT
/
em cos(ù)t) d r + /
em cos(cot) d t
'o
J3T/4
mT
[sin(wf)]o/4 + [sin(^)]3r/4}
TT
Expérimentalement, on doit s'assurer que le courant direct reste inférieur à la valeur maximale prévue
par le constructeur. Si la tension de seuil de la diode n'est pas négligeable devant l'amplitude de la
tension du GBF, le signal de sortie est nul sur une durée supérieure à la demi-période du signal d'entrée ;
la valeur moyenne du signal de sortie est alors inférieure à la valeur calculée précédemment.
Il est possible de redresser chaque alternance grâce à un pont de quatre diodes ou pont de Graetz
(Fig. 7.18). Lors des alternances positives, les diodes Xh et Vt, sont passantes et is est positif. Aux
alternances négatives, ce sont les diodes Xb et X)4 qui sont passantes et is est encore positif.
Usit)
m
v. <
fVW\
X3
x2
FIG. 7.18.
La valeur moyenne de la tension de sortie est le double de la précédente, 2emj7r, ce que l'on
établit sans calcul supplémentaire, en considérant que la tension redressée en double alternance est
la superposition de deux tensions redressées en simple alternance et de même valeur moyenne. En
pratique, cette valeur moyenne est directement accessible en branchant, en parallèle sur la résistance
R, un voltmètre en position « mesure de tension stationnaire ». La valeur lue est inférieure à la valeur
théorique précédente ; en effet les maxima de us sont inférieurs de 2U(i à ceux de e{t). Cette chute
de tension correspond aux tensions de seuil des deux diodes passantes à chaque alternance. Il en résulte
que le redressement des très faibles tensions est impossible.
227
Composants électroniques
On peut observer simultanément les tensions e(t) et iis(t) sur un oscilloscope à condition d'utiliser
un transformateur d'isolement entre la résistance de charge et l'entrée de l'oscilloscope afin d'éviter un
problème de masse entre le GBF et l'oscilloscope (Fig. 7.19).
Pour une tension d'entrée efficace Zs = 12 V et une résistance de charge R = 100 O , on a mesuré
une puissance d'entrée Ve = 1,75 W , alors que la puissance de sortie est 7^ = 1,15 W . Le rendement
du redressement est donc r = Vs/Ve = 0,66, une partie de la puissance étant dissipée dans les diodes
du pont de Graetz.
Ce montage est utilisé à la sortie des alternateurs qui équipent les véhicules ; après filtrage à basse
fréquence par une cellule RC et stabilisation par une diode Zener, comme nous verrons plus loin, la
tension stationnaire obtenue permet de recharger la batterie pendant la rotation du moteur. Les diodes
utilisées pour le redressement supportent couramment des intensités en direct de quelques ampères et
des tensions inverses de plusieurs centaines de volts.
Voie 1 de
l'oscilloscope
Voie 2 de
-Tensions
Transformateur
d'isolement
Fie. 7.19.
b) Stabilisation d'une tension
Comme la portion intéressante de la caractéristique d'une diode Zener est située dans le troisième
quadrant avec t/ < 0 et / < 0, et qu'elle est parallèle à l'axe des intensités, on utilise ce composant
pour stabiliser une tension. Les diodes employées ont des valeurs de Uz qui s'étendent sur une gamme
très large :
3 V < f/z ^ 200 V
En outre, il est toujours possible de placer plusieurs diodes Zener en série pour obtenir une tension plus
élevée.
Dans le montage représenté sur la figure 7.20, on souhaite obtenir une tension stationnaire aux
bornes de la résistance de charge R, bien que celle-ci soit variable et que la f.e.m E de l'alimentation
fluctue autour de sa valeur nominale E. Une diode Zener fonctionnant dans la zone de conduction
inverse, en parallèle sur la charge, répond à cette exigence. La résistance de protection Rp , placée en
série avec le générateur, limite l'intensité du courant qui traverse la diode, afin de ne pas dépasser la
valeur IM recommandée par le constructeur.
FIG. 7.20.
228
7. Composants électroniques
Tant que E reste supérieure à Uz
diode Zener impose U = Uz , d'où le courant Iz :
h — h—h —
E-Uz
Uz
Rr
R
Le choix de Rp exige que l'on connaisse les valeurs maximales Em et Im de la f.e.m du générateur et
du courant que peut supporter la diode. En effet :
h ^ /m
s'explicite selon
E -Uz
——
Rr
Uz
— ^ Im
R
.
ce qui donne
Rp ^
Em - Uz
lM
dans le cas le plus défavorable où la charge R est débranchée.
En outre, la stabilisation n'est possible que si le point de fonctionnement de la diode est dans la zone
Zener, afin que Uz = RIr , ce qui suppose une charge suffisante. Le courant délivré par le générateur
doit toujours avoir une intensité Ig supérieure à l'intensité Ir nécessaire dans la branche de la charge.
L'intensité L du courant débité par le générateur est minimale lorsque E atteint la valeur minimale
h ^ Ir
avec
h
Em - Uz
Rr,
et
IR
Uz
—
R
.
donne
Uz
R^ —
h
Exemple : supposons que le générateur utilisé possède une f.e.m qui varie entre 8 V et 12 V, alors
que l'on souhaite, aux bornes de la charge, une tension de 6 V , stabilisée par une diode Zener qui ne
peut supporter un courant inverse supérieur à 100 mA. En réalisant le montage étudié précédemment,
on doit avoir :
Em — Uz
= bon
RP >
lM
La résistance normalisée de la série £24 de valeur 68 fi convient. Quant à la résistance de charge elle
doit satisfaire à :
Uz
= 204 fi
R ^
Io
c) Écrêtage d'un signal
Les diodes peuvent facilement protéger les circuits d'éventuelles surtensions. Sur la figure 7.21,
deux diodes Zener identiques, de tensions caractéristiques Uz et Ud , sont branchées tête-bêche, en
parallèle avec le composant à protéger. Ce montage limite la tension de sortie us entre les deux valeurs
extrêmes —Ud — Uz et Ud + Uz ■ En effet, si \us\ est inférieur à Ud + Uz, alors les deux diodes sont
bloquées et leur présence n'a aucune influence. Dès que 1^ | atteint la valeur Uj+Uz , les deux diodes
deviennent passantes, Tune en direct et l'autre en inverse ; la valeur de us{t) est alors constante.
.(/)-r-C
Uz + Ud
R„
e
R
•
1
i
-Uz-Ud
T
FlG. 7.21.
Cette limitation est importante pour tous les systèmes comportant des bobines, car ces dernières
peuvent provoquer de fortes surtensions lors de l'ouverture du circuit. Pour éviter ces surtensions, il
Composants électroniques
229
suffit de placer une diode en parallèle avec la bobine (Fig. 7.22). En effet, lorsque l'interrupteur K est
fermé, la diode est bloquée ; lorsqu'on ouvre K, elle devient passante, mais la tension aux bornes de la
bobine reste fixée à une valeur proche de Uj . La diode se comporte donc comme un écrêteur de tension
aux bornes de la bobine ; évidemment il faut qu'elle soit capable de supporter de fortes intensités.
A
FIG. 7.22.
III. 4. — Thyristors
a) Description et fonctionnement des thyristors
Le thyristor est un composant semiconducteur similaire à une diode à jonction, mais il possède
une électrode supplémentaire appelée gâchette. Il ne laisse passer le courant que dans le sens direct, de
l'anode vers la cathode, et cela, à condition d'avoir été amorcé par un courant arrivant sur la gâchette.
Une fois l'amorçage réalisé, le thyristor devient passant et le demeure tant que la tension entre l'anode
et la cathode reste positive ; la gâchette est alors sans effet. Si cette tension s'annule, il se bloque.
Ainsi, grâce à un faible courant sur la gâchette, on peut commander, un courant très intense.
il
1
r/ 11
1
\\
//
\ 11 /
v y
1
/
' \\
\
/
v -/
\
V
1
1
/
/t
1
R,
l
c
Rr.
3
G
i
i
i
i
i
i
i
n
n
iii
1
1
i"\
1
K
i
t
A
7777"
Fig. 7.23.
FIG. 7.24.
Sur le montage de la figure 7.23, le circuit principal, alimenté par un générateur sinusoïdal de forte
amplitude comporte une thyristor et une résistance de charge. On peut y voir le symbole du thyristor.
La gâchette G du thyristor est reliée à un générateur stationnaire, de f.e.m E = 5 V ; cette branche
comporte une résistance de protection Rp = 10017 et un interrupteur de commande.
Tant que l'interrupteur est ouvert, aucun courant ne traverse la résistance de charge puisque le
thyristor est bloqué. Une brève impulsion sur l'interrupteur, lors d'une alternance positive du signal
d'entrée sinusoïdal e{t) , amorce le thyristor, lequel reste passant jusqu'à ce que la tension du générateur
e{t) s'annule. La charge est alors traversée par un courant intense. Une impulsion sur l'interrupteur, lors
d'une alternance négative, est, elle, sans effet, puisque le thyristor est alors en inverse. Une fermeture
prolongée de l'interrupteur rend le thyristor passant sur les alternances positives. La réouverture de
l'interrupteur bloque le thyristor dés l'annulation suivante de e{r) (Fig. 7.24).
Comme les diodes, les thyristors sont caractérisés par la tension inverse maximale qu'ils sont capables de supporter et par le courant direct maximal admissible sans détérioration du composant ; le
7. Composants électroniques
230
fabricant donne ces deux caractéristiques ainsi que le courant de gâchette nécessaire pour amorcer le
thyristor.
Exemple : le thyristor TIC 116D peut supporter un courant direct d'intensité efficace 7 = 6 A , une
tension inverse maximale 77/ = 400 V, et le courant de gâchette a pour intensité 7^ — 2 mA .
b) Application à la protection contre les surtensions
Il est possible d'utiliser un thyristor pour protéger un circuit d'éventuelles surtensions de l'alimentation. Dans le montage de la figure 7.25, un thyristor est placé en parallèle avec le circuit à protéger et
en série avec un fusible. La gâchette du thyristor est reliée à l'alimentation par une diode Zener, connectée en inverse, dont la tension Zener est égale à la surtension maximale admissible ; elle reçoit donc un
courant dès que la tension d'alimentation dépasse la tension Zener. Le thyristor est alors passant et un
fort courant provoque la fusion du fusible ; l'alimentation est alors coupée et le circuit ainsi protégé.
Fusible
^—
Diode .
Zener r7\~
1
R
Thyristor
;
—/
l
Circuit
à protéger
7777"
7777"
FlG. 7.25.
c) Triacs
Le triac est un composant semiconducteur équivalent à deux thyristors tête-bêche commandés par
la même gâchette, d'où le symbole représenté dans le montage de la figure 7.26a. Un triac est donc
bloqué tant qu'aucun courant ne traverse la gâchette ; une fois amorcé, il devient passant dans les deux
sens, tant que la tension ne s'annule pas. Il en résulte que le courant traversant la gâchette, à l'origine
de l'amorçage, peut être positif ou négatif. La plupart des triacs sont conçus pour fonctionner sous la
tension du secteur, avec un courant de commande de la gâchette d'environ 50 mA .
d) Application au contrôle de puissance
Les triacs sont très souvent utilisés pour contrôler la puissance fournie à une charge, en régime sinusoïdal, en bloquant une partie de chaque alternance. Sur le montage de la figure 7.26a, un triac est
placé en série avec la charge, sa gâchette est reliée à la tension d'entrée ue{t) sinusoïdale par l'intermédiaire d'un résister, de résistance variable R.
Lors de l'alternance positive, la diode D\ conduit et l'intensité du courant sur la gâchette du triac
atteint la valeur de déclenchement 7^ lorsque : {iie — U^/R = 7^ ; le réglage de R permet donc
d'ajuster la portion de l'alternance qui alimente la charge. Lorsque l'alternance positive se termine, le
triac se bloque.
Dans l'alternance négative, c'est la diode Do qui conduit ; le triac ne redevient conducteur que pour une
valeur de ue suffisamment négative ; il faut que {ue + Ud)/R = —fj. La condition est donc symétrique
de la précédente.
Notons que seule une portion des alternances de la tension d'alimentation fournit de la puissance
à la charge (Fig. 7.26b). Ce montage simple ne permet pas de réduire la puissance en dessous de la
moitié de la puissance maximale, car le déclenchement du triac a toujours lieu dans la première moitié
de chaque alternance.
Composants électroniques
231
Tensions
'Pi
Ug
V A
v2
R(
Ue T
S )/~\
TY_2f\
«
Triac
V
X
a)
V
'
b)
Fig. 7.26.
IV. — PILES ET ACCUMULATEURS
Les sources électriques autonomes, piles et accumulateurs, qui sont caractérisées par leur capacité à
fournir de la puissance électrique au circuit extérieur, sont indispensables pour tout équipement nomade :
véhicule, téléphone, ordinateur, satellite, etc. La différence de nature des réactions électrochimiques,
mises enjeu dans les piles et les accumulateurs, permet d'expliquer, qu'une fois déchargées, les piles
doivent être remplacées, contrairement aux accumulateurs qui, eux, peuvent être rechargés.
IV, 1. —Piles
Une pile électrique est un générateur électrochimique comportant une électrode positive, siège
d'une réduction chimique, et une électrode négative, où se produit une oxydation. Si les deux électrodes
sont connectées entre elles par un conducteur extérieur, on constate le passage d'un courant électrique
dans ce conducteur.
Les paramètres d'une pile sont sa tension à vide, ou f.e.m, de quelques volts en général, sa résistance interne, environ quelques ohms, et la charge totale qu'elle peut débiter, de Tordre de 1 A • h, ce
qui correspond à une charge totale <2 = 3 600 C .
Ordres de grandeur : Le tableau 7.2 donne la charge totale de quelques piles.
Pile
LR03 (AAA)
LR06 (AA)
LR14 (C)
LR20 (D)
Charge (A ■ h)
1,17
2,25
7
15
Tab. 7.2.
Remarque : Dans la dénomination des piles, la première lettre est relative à Télectrochimie (L pour alcaline manganèse, M pour oxyde de mercure, S pour oxyde d'argent, C pour lithium et P
pour zinc/air), la seconde concerne sa géométrie (R pour cylindre, F pour plate, S pour parallélépipède), et les chiffres qui suivent codent les dimensions ( 6 pour 14,5/50,5 mm,
12 pour 21.5/60mm, 20 pour 34,2/61,5 mm)
Au cours de la décharge, la polarisation progressive de Télectrolyte provoque une diminution de sa
f.e.m et une augmentation de sa résistance interne ; une fois la charge totale débitée, la f.e.m s'annule.
Les piles alcalines sont recommandées pour les appareils électriques qui nécessitent une puissance
suffisante : appareil photographique, appareil audio-portatif, jouet, etc. En revanche, les piles salines,
dont la durée de vie est moins longue, sont utilisées pour les appareils dont le fonctionnement est occasionnel : sirène, lampe-torche, télécommande infrarouge, etc.
232
7. Composants électroniques
IV. 2. — Accumulateurs
Les accumulateurs, appelés improprement « piles rechargeables » et plus justement batteries, sont
le siège de réactions chimiques qui peuvent se produire dans les deux sens.
Les plus courants sont les accumulateurs au plomb, utilisés en batterie de six, dans les véhicules ;
leur f.e.m est 2,2 W et leur résistance interne ne dépasse pas quelques milliohms. Leur capacité est
élevée, mais ils sont lourds et contiennent un électrolyte acide. Actuellement, la f.e.m des batteries qui
équipent la plupart des automobiles est de 12 V, mais, en raison de la multiplication de petits moteurs
électriques qui assurent freinage, assistance à la direction, confort de l'habitacle, pilotage du moteur,
etc., les constructeurs prévoient dans les prochaines années, l'utilisation de batteries de f.e.m 48 V qui
permettent d'augmenter la puissance électrique sans modifier l'intensité débitée.
Les accumulateurs au nickel (Ni) ou au lithium (Li) sont les plus répandus dans les applications
domestiques, car ils n'exigent aucun entretien, sont d'un emploi facile, durent suffisamment longtemps
et sont plus légers que ceux au plomb.
Les énergies massiques des accumulateurs sont sensiblement plus faibles que celles des piles
comme l'indique le tableau 7.3. Cependant, la possibilité de les recharger un grand nombre de fois,
environ un millier, représente un avantage certain pour nombre d'applications.
7
Energie massique
(W-h-kg"1)
Pile
Accumulateur
Li
Accumulateur
Ni/MVHV
Accumulateur
Ni/Cd
Accumulateur
Pb
500
150
70
50
35
Tab. 7.3.
Les accumulateurs se déchargent assez rapidement par auto-décharge ; c'est pour cette raison qu'ils
sont toujours vendus déchargés et qu'on déconseille de les utiliser sur de longues durées avec une
demande de puissance faible, comme dans les télécommandes ou les horloges. En revanche, malgré leur
prix dix à vingt fois plus élevé que celui des piles, on les recommande pour les appareils nécessitant une
forte puissance électrique, comme les appareils de photographie numérique, les voilures électriques, les
camescopes et les téléphones portables.
Au cours de la décharge d'un accumulateur, le métal de l'une des électrodes se dissout dans la solution, alors que, au cours de sa charge, ce même métal se redépose sur l'électrode, mais pas exactement
à l'endroit où il s'est initialement dissous. Après un certain nombre de charges et décharges successives, une modification de la fonne de l'électrode se produit, provoquant à tenue un court-circuit entre
les deux électrodes et rendant alors l'accumulateur inutilisable.
Y. — TRANSISTORS BIPOLAIRES
Le transistor bipolaire est un composant semi-conducteur actif qui, pendant longtemps, a constitué
l'élément essentiel des montages amplificateurs. Actuellement, dans beaucoup d'applications, on lui
préfère l'amplificateur opérationnel (cf. chapitre 8), dont il est l'un des constituants avec les résistors,
les condensateurs et les diodes.
Un transistor bipolaire est un système capable d'amplifier la puissance d'un signai d'entrée, en puisant la puissance nécessaire dans une alimentation stationnaire. laquelle fixe son point de fonctionnement. Il a été inventé en 1948 par les trois physiciens américains W. Shockley, J. Bardeen et W. Brattain, alors qu'ils travaillaient aux laboratoires Bell ; le mot transistor vient de la compression des mots
Composants électroniques
233
transii (du courant) et résistor. On qualifie ces transistors de bipolaires car leur fonctionnement repose
sur deux types de porteurs, les électrons et les trous (cf. Elecîromagnéîisme).
Dans la suite nous commençons par décrire le composant, puis nous présentons ses caractéristiques
et quelques montages de base.
V. 1. — Description
a) Constitution
Un transistor est un composant actif à trois bornes, Vémetteur, la base et le collecteur. Les caractéristiques des deux jonctions émetteur-base et base-collecteur peuvent être obtenues à l'aide de la fonction « test diode » d'un multimètre ; rappelons que ce dernier affiche la valeur de la tension de seuil
d'une diode connectée dans le sens direct. En testant les bornes deux à deux, nous obtenons une valeur de 0,68 V entre l'une des bornes et les deux autres. Le testeur indique une résistance infinie entre
ces deux dernières, quel que soit le sens de branchement. Ainsi, un transistor est constitué de deux jonctions pn ou np tête-bêche, d'où deux types de transistors bipolaires : les premiers npn, les seconds
pnp.
Plus précisément un transistor bipolaire npn est un cristal de silicium dopé alternativement n (le
collecteur), p (la base) et fortement n (l'émetteur) (cf. Electromagnétisme). Il est donc effectivement
constitué de deux jonctions pn, en inverse l'une de l'autre, ce qui lui donne le même comportement
que celui de deux diodes tête-bêche. La zone centrale est faiblement dopée et de largeur très faible par
rapport aux deux autres zones.
Les noms émetteur et collecteur dans un transistor npn viennent de la circulation des électrons
depuis l'émetteur jusqu'au collecteur.
Le fonctionnement des transistors npn est identique à celui des transistors npn, si l'on inverse les
polarités. Dans ces transistors, ce sont les trous (cf. Électromagnétisme) qui circulent depuis l'émetteur
jusqu'au collecteur.
Sur la figure 7.27, on a représenté les schémas de transistors npn et pnp de façon standard. Dans
les deux cas, la flèche qui repère l'émetteur est orientée dans le sens passant de la jonction émetteur-base.
Dans la pratique, un ergot permet de situer l'émetteur ; le collecteur est à l'opposé et la base évidemment
entre les deux autres zones.
Collecteur
Base
Collecteur
Base
Emetteur
Transistor npn
Émetteur
tî>
c
Transistor pnp
FIG. 7.27.
b) Effet transistor
Bien que le transistor soit constitué de deux diodes tête-bêche, son fonctionnement est singulier,
en raison de Veffet transistor, lequel consiste en une forte amplification en courant, entre la base et
le collecteur, lorsqu'on polarise en direct la jonction np émetteur-base et en inverse la jonction pn
collecteur-base.
234
7. Composants électroniques
Le rapport entre l'intensité ij, du courant de base et celle ic du courant collecteur est désigné le
plus souvent par (3 :
Ordre de grandeur : ce facteur /3 étant généralement compris entre 50 et 800, on voit qu'un faible
courant de base provoque un fort courant de collecteur.
Malgré l'information donnée par le constructeur, on constate pour différents transistors, de même
référence, une grande dispersion des valeurs de (3 ; aussi est-il préférable de mesurer son facteur (3
avant d'utiliser un transistor et de choisir ce dernier à partir d'autres paramètres qui présentent peu
de dispersion. Le tableau 7.4 présente les caractéristiques fournies par les fabricants pour quelques
transistors.
Références
Uce,max (^0
4 (mA)
VM (mW)
(3
Petits signaux 2N1711
50
1000
800
100 à 300
Petits signaux BC 107
45
1000
300
125 à 500
Petits signaux PN 2222
30
600
625
100 à 300
Puissance (Darlington) BSS 51
60
1000
5000
> 2000
Puissance BC 141
60
1000
3700
40 à 250
Haute fréquence (400 MHz ) BF 198
30
25
500
>10
Tab. 7.4.
V. 2. — Caractéristiques du transistor bipolaire
A l'aide du montage de la figure 7.28, on peut tracer les caractéristiques d'un transistor, puisqu'il
est possible d'agir séparément sur les courants stationnaires //, et Ic , ainsi que sur la tension Uce. Pour
le transistor npn de référence 2N 1711, nous avons obtenu les courbes de la figure 7.29 donnant 1C en
fonction de Uce , à //, constant. On distingue quatre zones de fonctionnement.
'L(mA)
4 = 60 (xA
5A
Rb
Eb
Ur. E
4 = 40 (xA
4 = 20 (i-A
j
Ul
4 =0
50
FIG. 7.28.
Fig. 7.29.
«v(V)
Composants électroniques
235
a) Zone linéaire
Dans la zone linéaire, qui correspond au fonctionnement le plus courant du transistor, Injonction
émetteur-base est passante, alors que la jonction collecteur-base est bloquée. Les valeurs correspondantes de Uce sont comprises entre 0,2 V et 50 V . On constate que l'intensité îc est pratiquement
indépendante de Uce et qu'elle est proportionnelle à U : Ic — (Slt avec /3 = 100 ici.
Pour le collecteur, le transistor se comporte comme une source de courant commandée par le courant de base d'intensité 4 • La mesure de Ut,e dans cette zone donne une valeur à peu près constante
Ube = 0,6 V , correspondant à la tension Ud de la jonction émetteur-base en mode passant. On en déduit que, dans la zone linéaire, le transistor est équivalent au schéma de la figure 7.30.
B
W-
h
Ud
y 'h
i
FIG. 7.30.
FIG. 7.31.
Application : la figure 7.31 représente un montage dans lequel on utilise le fonctionnement linéaire du transistor 2N1711, dans le but d'amplifier le courant 4 délivré par la photopile OAP12.
Cette dernière, qui travaille dans le visible, se comporte comme un générateur dont le courant électromoteur est quasiment proportionnel à son éclairement. L'amplification, avec un transistor dont le gain
mesuré est p = 200, permet de lire sur un milliampèremètre un courant d'intensité Ic = pi/, proportionnel à l'éclairement ambiant. Sans le transistor, ces intensités n'auraient pas pu être mesurées avec
précision sans utiliser un montage plus complexe comportant un AO (cf. chapitre 8).
La figure 7.32 donne le schéma équivalent du transistor npn dans la zone linéaire, en tenant compte
de la résistance interne r/, de Injonction base-émetteur de l'ordre du kfl et de la résistance interne rC(,,
de quelques dizaines de kfi, du générateur de courant commandé.
B
C
H— >1
lb
rb
Ud
E
FIG. 7.32.
Remarque : Le facteur d'amplification en courant p augmente avec la température. Aussi les transistors bipolaires peuvent-ils subir un emballement thermique car une élévation de température conduit à une augmentation de p, donc de Ic, ce qui entraîne à nouveau une
élévation de température.
236
7. Composants électroniques
b) Zone saturée
La zone de saturation de Ic correspond aux faibles valeurs de Uce, c'est-à-dire inférieures à
Uce,s = 0,2 V. Dans cette zone Ic ^ /34 et une augmentation de C n'a pratiquement aucune influence sur Ic ; le transistor est quasiment équivalent à un court-circuit entre l'émetteur et le collecteur,
avec une tension résiduelle Uce^ = 0,2 V (Fig 7.33).
*b
rt
Ic
C
Rt
Ud
h
Uhe
eT
Fig. 7.33.
FIG. 7.34.
Exemple : dans le montage de la figure 7.34, où E = 10 V et Rco = 2 kfi , déterminons la valeur de
Rb telle que le transistor fonctionne en zone saturée. Les caractéristiques du transistor 2N1711 fournies
par le constructeur sont :
/S = 200
£/c^ = 0,15 V
Ube = 0,6 V
et
= 500 Û
On en déduit :
1 =
E-Ur
10-0,15
R.
2 x 103
= 4,925 mA
et
Ib ^
= 24,6 |xA
et
Rb < 381,2 kO
D'où, en tenant compte de U^e = 0, 6 V :
Rb + rb ^
E — Ube
10,0-0,6
h
24,6 x 10^6
= 381,7 kO
On constate que rb est négligeable devant Rb .
c) Zone bloquée
La zone de blocage du transistor correspond à une valeur nulle de Ic . La façon la plus simple
de réaliser ce blocage est d'appliquer une tension Ube inférieure à la tension de seuil
= 0, 6 V .
Cette tension Ube peut être négative, à condition de ne pas dépasser les valeurs extrêmes données par le
constructeur. Dans cette zone, le transistor est équivalent à un interrupteur ouvert entre l'émetteur et le
collecteur. En réalité, Ic n'est pas nul et vaut (3Ib avec Ib égal au courant de saturation de Injonction
émetteur-base, de l'ordre de 1 nA .
Exemple : dans le circuit de la figure 7.35, déterminons la valeur de la résistance R pour laquelle
le transistor est bloqué. Les paramètres du montage sont identiques à ceux de l'exemple précédent, avec
Rb = 5 kfi. Le transistor étant bloqué, on a :
fc = Ib = 0
et
Ube < 0,6 V
On trouve en utilisant le pont diviseur de tension entre l'émetteur et la masse :
uhP =
R
R + Rb
E
d'où
R <
Ube
E-Uht
Rb = 3\9El
Les fonctionnements en zones bloquée et saturée sont généralement associés dans les montages où
on veut réaliser un interrupteur commandé par la tension Ute ■
237
Composants électroniques
Rr
Ri,
B
Ur
n a
R
k
-s
ube
T
Fig. 7.35.
d) Zone d'avalanche
Lorsque la tension Uce s'élève, apparaît une zone d'avalanche dans la jonction collecteur-base
appelée perçage de la base. Les tensions limites, qui sont fournies par le constructeur, varient de 20 V à
plus de 200 V . Évidemment, le point de fonctionnement normal du transistor doit être éloigné de cette
zone.
e) Puissance maximale
Comme pour les diodes, les transistors ne peuvent dissiper qu'une puissance limitée Vm , indiquée
par le fabricant, de quelques dixièmes de watt à plusieurs centaines de watts. Dans ce dernier cas, ils
sont équipés de radiateurs afin de faciliter l'échange thermique avec le milieu ambiant. Exprimons la
puissance reçue par le transistor :
V = Uheh + UcJc
avec
lc > h
et Uce de l'ordre de Uhe. Il vient donc:
V « Ucdc
d'où
lc <
Vm
Vr
On détermine ainsi sur la caractéristique du transistor l'hyperbole limitant la zone de puissance acceptable.
f) Paramètres stationnaires et paramètres dynamiques
L'étude précédente était relative au fonctionnement du transistor en régime stationnaire. Cependant,
le transistor fonctionne, le plus souvent, avec des signaux variables, de faible amplitude, autour d'un
point de fonctionnement stationnaire déterminé par les alimentations. On fixe ce point avec le montage
de polarisation du transistor.
Le signal variable d'entrée provoque de faibles variations des tensions et des courants autour du
point de fonctionnement stationnaire. Les intensités ifh et i'c des courants de base et de collecteur ont
alors pour expressions respectives :
i'b = h + 4
avec
\ib\ <C h
et
i'c = 4 + 4
avec
|4| < h
De la même façon, la tension collecteur-émetteur u'ce se met sous la forme :
u'ce = Uce + uce
avec
\uce\ <C Uce
On peut alors déterminer les paramètres dynamiques du transistor qui lient les grandeurs variables entre
elles, à partir des caractéristiques graphiques de ce composant : ce sont généralement les pentes des tangentes au point de fonctionnement stationnaire. Comme ces pentes dépendent de ce point, les constructeurs donnent généralement des valeurs moyennes de ces paramètres.
7. Composants électroniques
238
En raison de l'influence du point de fonctionnement, de la grande dispersion des valeurs des paramètres au sein d'une même gamme de transistors et de leur faible écart par rapport aux valeurs stationnaires, dans ce qui suit, nous ne distinguerons pas valeurs stationnaires et valeurs dynamiques. Il en
résulte que, dans la zone linéaire et en régime variable, le transistor est équivalent au montage de la figure 7.36.
B-M
'b
n
T
c
Fig. 7.36.
V. 3. — Montages simples avec transistors bipolaires
a) Polarisation
La première étape, commune à tous les montages, est la polarisation du transistor, laquelle fixe
le point de fonctionnement, autour duquel les grandeurs évoluent. Cette polarisation, assurée par l'alimentation, fournit la puissance électrique nécessaire afin que l'on puisse avoir une amplification de la
puissance entre l'entrée et la sortie.
La polarisation peut être réalisée par une seule alimentation et des résistors ; la figure 7.37 représente les deux polarisations les plus couramment utilisées : la polarisation économique (Fig. 7.37a) et la
polarisation par pont de base (Fig. 7.37b) ; le qualificatif d'économique provient du nombre réduit de résistors nécessaires à la réalisation du montage.
I
Rro
/?/,
LT
E
s
Ri
Rr
T
b)
a)
FIG. 7.37.
Établissons l'expression des courants et des tensions, dans le montage de polarisation économique
(Fig. 7.37a), pour un point de fonctionnement dans la zone linéaire. Dans la maille extérieure, les lois
de Kirchhoff donnent :
E = Rb1h + Ube + Reh
avec
îe
{fi + 1)L
d'où
Ib
E-UbÉ
Rh + {fi+V)Rt
Pour que Injonction base-émetteur soit passante, il est nécessaire que E soit supérieure à la tension Ube
de cette jonction qui vaut 0,6 V . Le courant dans la base, d'intensité //,, est ainsi fixé par Rb et Re .
Composants électroniques
239
Dans la maille passant par Rco , on a de même, en zone linéaire :
E = RcoIc + Uce + ReIe
avec
/c =/?//,
d'où
Uce = E- Ih [Rcofi + Re{p + 1)]
Comme 4 est déjà fixé, la valeur de la résistance Rco détermine Uce. Le fonctionnement est effectivement linéaire si Uce est supérieure à la tension de saturation, laquelle vaut environ 0.2 V. Il faut
également vérifier que le produit /c x Uce soit nettement inférieur à la puissance maximale que peut dissiper le transistor.
Avec une polarisation par pont de base (Fig. 7.37b), il n'est pas nécessaire de reprendre toutes les
étapes précédentes ; en effet, le générateur de Thévenin équivalent au diviseur de tension, formé par E,
Ri et /?2 , permet de se ramener au montage de la polarisation économique en remplaçant E et R/,,
respectivement, par :
w
^2
R] +
^
E
.
et
„/
K
^1^2
R\ -\- Ri
b) Classes d'amplification
La polarisation étant fixée, on envoie, en entrée, un signal variable, et on observe, en sortie, le signal
amplifié. Pour définir une entrée et une sortie, il faut choisir une borne qui sera commune à l'entrée et à
la sortie ; la nature spécifique du montage, émetteur, base ou collecteur commun, n'apparaît que lors de
l'application des signaux variables, la polarisation étant la même quel que soit le montage.
L'amplitude du signal d'entrée ne doit pas être trop grande, afin d'éviter d'une part la saturation
dans l'alternance positive, d'autre part le blocage du transistor dans l'alternance négative. On distingue
les amplificateurs selon la position de leur point de fonctionnement :
i) Les amplificateurs de classe A ne fonctionnent que dans leur zone linéaire.
ii) La classe B correspond à un point de fonctionnement placé à la limite de la zone de blocage.
Ainsi seule l'alternance positive du signal variable est amplifiée pour un transistor npn . Afin d'éviter la
très forte distorsion qui en résulte, un second transistor est utilisé pour amplifier la seconde alternance.
Une distorsion résiduelle est observée pour les petits signaux, car le transistor n'atteint la zone linéaire
que si l'entrée dépasse la tension de seuil de la jonction base - émetteur. Le principal avantage de cette
classe d'amplification est la très faible consommation au repos, puisque /c est nul.
iii) La classe AB est relative à un point de fonctionnement placé dans la zone linéaire, mais très
proche de la zone de blocage. La consommation au repos n'est plus nulle mais la distorsion résiduelle
observée pour les faibles signaux en classe B disparaît.
iv) La classe C correspond, elle, à un point de fonctionnement qui ne permet le déblocage du
transistor que sur une très faible portion du signal d'entrée. La sortie est alors formée d'une succession
d'impulsions ; l'ensemble a évidemment un comportement fortement non linéaire.
v) La classe D utilise des transistors de puissance en commutation et n'est utilisée que pour la
commande de moteurs.
c) Montage amplificateur en émetteur commun
Intéressons-nous ici à un amplificateur dans lequel le transistor 2N1711 fonctionne en zone linéaire
(Fig. 7.38).
Le signal à amplifier est sinusoïdal, de fréquence fo . Afin de le superposer aux courants de polarisation du transistor sans modifier ces derniers, on utilise un condensateur de capacité Cg en série avec
le générateur sinusoïdal. En effet, ce condensateur se comporte comme un court-circuit en régime sinusoïdal et comme un coupe-circuit en régime stationnaire.
240
7. Composants électroniques
c.
H
Me
Us
e
Ri
u
Ri
FIG. 7.38.
FTG. 7.39.
De même, la résistance de charge /?c = 1 kfi qui ne doit pas influer sur la polarisation, est
connectée en série avec un condensateur de capacité Cc . Enfin, l'émetteur étant la borne commune à
l'entrée et à la sortie pour le signal sinusoïdal, on court-circuite la résistance Rc à l'aide d'un troisième
condensateur de capacité Ce.
La figure 7.39 représente l'équivalent du circuit en régime stationnaire, dans lequel les condensateurs sont des coupe-circuit. Le schéma est identique à celui qui a servi à la polarisation du transistor ;
l'application du signal variable n'a donc pas d'influence sur la polarisation.
Les capacités des condensateurs sont choisies afin que leurs impédances soient négligeables à la
fréquence /o. En régime sinusoïdal, le circuit est alors équivalent à celui de la figure 7.40 puisque le
générateur stationnaire de f.e.m E se réduit à un court-circuit et que l'on utilise le transistor en zone
linéaire (Fig. 7.36) :
hT
Ri
u.
Ri
n
Ri
T
R.
rb
R,
T
T
FIG. 7.40.
Déterminons le facteur d'amplification en tension Au, sachant que la tension aux bornes de la
résistance
de la base est la grandeur d'entrée. Il vient, en utilisant un diviseur de courant pour
déterminer is et en introduisant Rt, = R\l/Ri = 300 kfi et R'co = Rco/jrco « Rco = 1.46 kfi :
ue = rbib
et
us = ~Rcis = -
RL + R,
pib
d'où
=
RcoRc
R'rn + Rc
^
b
r
Avec les valeurs usuelles pour un transistor 2N1711,
= 150 et rb = 1,0 kfi, on trouve Au = — 89 .
Ainsi, les tensions d'entrée et de sortie sont en opposition de phase : c'est un amplificateur inverseur.
Établissons l'expression du facteur d'amplification en courant A, :
e
Rhfb
=
~ Rh
i? -r
_i_ } h
et
us = —Rcis
d"où
PR'coRb
A/ = É =
h
{R'co + Rc} {Rh + rh)
La résistance d'entrée du montage s'obtient selon : Re = ue/ie = {rbRb)l{rb -F Rb) ^ rb — \ kfi .
Quant à la résistance de sortie, on la trouve en remplaçant la charge par un générateur idéal de tension
241
Composants électroniques
de f.e.m. us et en passivant le générateur d'entrée ;
Rs — — — — r'co — 1,46 kfi
h
car
4 =0
Remarque : Le fil reliant rh et le générateur de courant commandé (/S4) n'est parcouru par aucun
courant. L'hypothèse inverse conduirait à une accumulation de charge dans la partie droite
ou gauche du circuit puisqu'il n'y a pas de fil de retour pour ce courant.
d) Montage Darlington
Le facteur d'amplification en courant
et la puissance que peut supporter un transistor varient en
sens inverse ; les transistors de puissance présentent en général de faibles valeurs de (3 . L'association
de deux transistors, l'un de facteur d'amplification en courant élevé, l'autre de puissance, permet de
contourner ce problème ; c'est ce qui est réalisé dans le montage Darlington du nom de l'électronicien
américain S. Darlington (Fig. 7.41).
Les deux collecteurs sont réunis et l'émetteur du premier transistor est relié à la base du second. Le
courant de base du premier transistor est amplifié par un facteur
, puis par un facteur p2 • Le facteur
d'amplification en courant du montage est alors :
4,1
= PlPl
Ce montage est généralement disponible sous la forme d'un composant discret à trois connexions : la
base du transistor 1, l'émetteur du transistor 2 et le collecteur de ce dernier. Il se comporte comme un
transistor de facteur d'amplification en courant très élevé, qui atteint plusieurs milliers, avec une tension
émetteur-base de l'ordre de 1,4V,
C
, •
l
b \lbA
TX
h,2
B
A
le,2 L
ieE
->—3
Fig. 7.41.
e) Étage de sortie push-pull
Les montages de classe A présentent l'inconvénient de consommer une puissance électrique, même
en l'absence de signal d'entrée ue, en raison du circuit de polarisation. Cet inconvénient devient rédhibitoire lorsque le montage doit alimenter un composant nécessitant lui-même beaucoup de puissance,
comme un haut-parleur dans un étage de sortie d'un amplificateur audio.
En revanche, le montage de la figure 7.42, qui fonctionne en classe B, permet de fournir une grande
puissance au haut-parleur, avec une consommation nulle lorsque ue = 0. Le transistor npn conduit
aux alternances positives du signal d'entrée, alors que le transistor pnp conduit, lui, aux alternances
négatives. Cette configuration, dans laquelle les deux transistors ont des rôles complémentaires, est dite
en push-pull (de l'anglais pousser-tirer).
Cependant, dans ce montage, la tension de sortie suit celle de l'entrée à la tension base-émetteur
près. C'est la distorsion de croisement, que l'on corrige simplement en augmentant de 0, 6 V le signal
242
7. Composants électroniques
d'entrée sur la base de chaque transistor, à l'aide de deux diodes (Fig. 7.43). Ainsi corrigé, le montage
travaille en classe AB.
Pour les très fortes puissances, on remplace chaque transistor par un montage Darlington.
15 V
X
FIG. 7.42.
Fig. 7.43.
f) Commutation
Un transistor commute lorsqu'il passe de l'état bloqué à l'état saturé ou inversement. Dans l'état
bloqué, le transistor est équivalent à un coupe-circuit entre le collecteur et l'émetteur ; dans l'état saturé,
il se comporte quasiment comme un court-circuit entre les mêmes points, puisque la tension Uce reste
inférieure à 0,2 V.
Tout l'intérêt de la commutation réside dans la faible consommation de puissance du transistor,
lorsqu'il est dans l'un des deux états : s'il est bloqué les courants sont nuls, s'il est saturé c'est Uce qui
est très faible. En revanche, pendant la commutation, la consommation électrique n'est pas négligeable,
surtout si la fréquence de basculement est élevée.
Exemple : le circuit de la figure 7.44 permet d'allumer une lampe électrique à partir d'un transistor
2N1711 utilisé en commutation et d'une photorésistance sensible à l'éclairement ambiant. La lampe
fonctionne normalement sous une tension de 4,8 V et une intensité de 0,10 A, ce qui correspond à une
résistance en fonctionnement /?/ = 48 fi. La photorésistance, elle, présente une résistance R\ = 100 fi
sous un éclairement ambiant, et une résistance supérieure à
= 5 kfî pour un éclairement inférieur
au seuil d'allumage souhaité de la lampe. Le facteur (3 du transistor vaut 300 .
FIG. 7.44.
Cherchons à déterminer la résistance R afin de provoquer le blocage du transistor sous éclairement
ambiant et sa saturation dans l'obscurité. La première condition exige que la jonction émetteur - base
Composants électroniques
243
soit bloquée. Par conséquent, il vient, en utilisant un diviseur de tension :
/C| + K
Ud
0,6
La seconde condition, transistor saturé dans l'obscurité, se traduit par :
/;,>!
p
avec
Ic =
8
a;
" Q;
4O
2
= 0,096 A
d'où
JUU
= 0,32 mA
D'après la loi des mailles, on a :
U^E-U.
avec
%=
d'où
R=
<
0
= 9.5 kiî
Il suffit donc de choisir R = 2 kli pour obtenir le fonctionnement en commutation désiré.
VI. — TRANSISTORS A EFFET DE CHAMP
Contrairement aux transistors bipolaires, qui font intervenir deux types de porteurs de charge, les
transistors à effet de champ n'impliquent qu'un seul type de porteurs de charge ; aussi sont-ils qualifiés
dé unipolaires. Leur conception fut proposée par W. Shockley, dès 1952.
Par rapport aux transistors bipolaires, leur intérêt est double : d'une paît ils sont plus faciles à
fabriquer, d'autre part ils sont commandés, non par un courant, mais par une tension.
Il existe deux types de Transistors à Effet de Champ, brièvement TEC (FET en anglais pour Field
Emission Transistor) :
i) les JTEC pour lesquels la commande s'effectue par l'intermédiaire d'une Jonction polarisée en
inverse, d'où la première lettre J,
ii) les MOSTEC pour lesquels la commande est réalisée à l'aide d'une électrode métallique isolée ;
les trois premières lettres MOS viennent de Métal Oxyde Semiconducteur.
VI. 1. — Transistors de type JTEC
■d
o
c
a) Constitution
Un transistor JTEC est constitué d'un barreau de silicium, dont la partie centrale, le canal, est
dopée p ou n, et dont les extrémités sont reliées à deux électrodes, la WMrce S et le drain D.
Le canal repose sur un substrat, d'épaisseur de l'ordre de 0,1 mm , dopé différemment et relié à
une troisième électrode, la grille G ou porte (Eig. 7.45a). La jonction entre cette dernière et le canal est
le siège d'un champ électrique interne, mais elle se comporte comme un isolant car elle est dépeuplée
de porteurs de charge. Sur la figure 7.45a, le canal est dopé n, contrairement à la grille qui est dopée
p, comme le substrat. La figure 7.45b représente un modèle équivalent au JFET de la figure 7.45a.
u
Les symboles des JTEC à canal n ou p sont représentés sur la figure 7.45c ; la flèche sur la grille
est orientée dans le sens passant de la jonction.
h) Effet de champ
Si la grille n'est pas connectée, le barreau de silicium dopé se comporte comme un conducteur
ohmique dont la résistance dépend du dopage et de la longueur du canal.
244
7. Composants électroniques
Zones dépeuplées
\ Dt \
Source
Drain
A
Grille
G
G
P
Uî
n
p
Ugs<Q
G
P
"X
;
1
a) JFET à canal n
JTEC à canal n
>
JTEC à canal p
Canal
b) JFET à canal n
c)
FlG. 7.45.
On commande la résistance entre le drain et la source, en polarisant la jonction grille-source en
inverse : Ugs < 0 (Fig. 7.45b) pour un JTEC à canal n . Une telle tension augmente le champ interne
ainsi que la largeur de la zone dépeuplée ; il en résulte une diminution de la largeur du canal et par
conséquent une augmentation de la résistance R^s entre le drain et la source. C'est Veffet de champ
produit par la tension Ugs.
Deux évolutions sont alors possibles :
i) une augmentation de la tension inverse sur la grille \Ugs\, qui provoque un resserrement du canal
jusqu'à sa disparition et donc une résistance infinie entre le drain et la source ; le transistor est bloqué
(Fig. 7.46a),
il) une augmentation de la tension Uds, entre le drain et la source, sans modifier la tension inverse
sur la grille. Le courant augmente d'abord proportionnellement à
, la résistance RdX restant pratiquement constante. Au-delà d'une tension
s, le canal se pince et sa résistance Rcis augmente avec
la tension U^s, de telle sorte que le courant n'augmente plus : c'est la zone de pincement (Fig. 7.46b).
Zone dépeuplée ^ ^
\
Pincement.
G
p
i
G
p
D
p
p
vds > 0
.
Ugs<0
Ug5 < 0
telD
/
b)
a)
FIG. 7.46.
Remarque : Au-delà d'une tension de claquage Uds,c » Ie canal subit une avalanche comparable à celle
des diodes polarisées en inverses ; le transistor est alors hors d'usage.
c) Réseau de caractéristiques d'un JTEC à canal n
On approfondit l'étude précédente, à partir du tracé des caractéristiques du JTEC à canal n , ce que
pennet de réaliser le montage de la figure 7.47.
Les relevés les plus instructifs sont, d'une parten fonction de f/^ , à f/?J constant (Fig. 7.48a),
Composants électroniques
245
D
h
G
I
^
J
Vds
•
É
vjs
T
S
Fie. 7.47.
et d'autre part
en fonction de (/çs, la tension Uds étant maintenue égal à Uds.s (Fig. 7.48b). On
distingue aisément les grandeurs suivantes caractéristiques du JTEC 2N 3819 :
i) la tension de blocage qui vaut ici UgSû = —4 V, pour laquelle
= 0,
ii) la tension de saturation Uds,s > égale à —UgS,o , pour laquelle le pincement se produit sans polarisation de la jonction grille-source ( Ugx = 0),
iii) le courant d'intensité
qui vaut ici 12 m A,
, correspondant à Ugs = 0 et à Uds,s » que l'on note souvent Jp et
iv) la tension de claquage Uds,c , de l'ordre de 25 V .
Le courant entrant par la grille est le courant de saturation inverse de la jonction ; il est très faible,
de l'ordre de 1 pA . On constate, expérimentalement, que lors d'une élévation de température, la tension
Ugsfi diminue de 2,2 mV • K-1 et que Ids,s devient lui aussi plus faible, ce qui exclut tout emballement
thermique du JTEC, contrairement au transistor bipolaire.
On peut distinguer sur ce réseau de caractéristiques trois zones : le comportement ohmique, le
pincement et le blocage.
Us (rnA)
Us (rnA)
Zone de pincement
= 0V
Us, s
-12
-10
10
_ QO
ugs = -1 V
-Zone ohmique
\ Zone
d'avalanche
j, _
^V
= -2
Ugs —
L
- 6
- 4
2--,
- 2
Ugs ^ -4 V
0
l
Uàs.S
10
15
20
^(V)
25
r 1
Ugs fi —2
^•(V)
b)
a)
FIG. 7.48.
d) Zone ohmique
La zone ohmique est la zone d'augmentation de Us avec Uds (Fig. 7.48). Pour les faibles valeurs
de Uds > de l'ordre de 1 V, les courbes représentant Us en fonction de Uds sont des droites passant par
l'origine, d'où le comportement linéaire autour d'un point de fonctionnement : le canal est équivalent à
un résistor dont la résistance Rds dépend de Ugs.
Dans cette zone, on peut faire varier la résistance Rds, en commandant uniquement Ugs, précisément entre une centaine d'ohms, lorsque U8S = 0, et l'infini : c'est une résistance commandée par une
tension (Fig. 7.49a).
246
7. Composants électroniques
Remarque : La commande d'une résistance par une tension, sur une large gamme de valeurs, peut
s'avérer très intéressante dans la réalisation d'un circuit intégré, car elle évite l'inclusion
dans le circuit de plusieurs résistors et surtout le basculement d'une résistance à l'autre.
.D
G
G
iï-D
i
gs
R(ls ( Cgs
f'ds
' M
a) Zone ohmique
b) Zone de pincement
Fie. 7.49.
e) Zone de pincement
La zone de pincement correspond aux valeurs pratiquement constantes de Ux observées pour une
tension
comprise entre Uds^ et Ucjsx . L'intensité îds suit approximativement la relation empirique
suivante (Fig. 7.48b) :
U
*C2
u.8S,0.
/ — tds,s (\
tds
I t
dans laquelle
et Ugs$ dépendent essentiellement de la géométrie du transistor et du dopage ; on
voit que
est, dans ce modèle, indépendant de Uds.
Cette zone est l'équivalent de la zone de comportement linéaire des transistors bipolaires. La contribution d'un signal variable ugs, qui se superpose à la tension de polarisation Ugs, donne un courant
variable drain-source ids qui s'ajoute au courant stationnaire Ids. Comme la relation empirique précédente est toujours satisfaite, il vient :
T I ; — f
f1
tds + lds — tds,s 1 A
\
d'où, en retranchant
l-
_ _9/
f1
ds — ^'ds,s \ J\
rj
U
gs,0
1
J
_ r
( 1
— tds,s I 1
\
, ugs
jj2
^ tj2
Ugsp
Ugs0
9
Ugs
T! *
tJgs,0
n
Ugs
îln
Ugs fi
„ Ugs2ugs
TJ
ug50
dans les deux membres :
^85 \ UgS | r
f UgS \
I ,,
"i" *ds,s 1 rT
I
Tr
UgS fi J Ugs fi
V UgS fi )
_
—
,2
U
j
Ugs)
gS
I
u ^-{Ugsfi
1j
ds,s gs
' dsvs T .-y
7T2
f/?S)0
c-S)û
Cette relation n'est pas linéaire en raison du terme en u^s. On retrouve la linéarité si :
\ugs\ < 2\UgSfi - U.
Il est alors intéressant d'introduire la transductance g du transistor, c'est-à-dire le rapport courant/tension entre la sortie et l'entrée :
r
^-{Ugsfi ~ Ugs)
lds = -lds,sUgs
772
Ugs fi
d 0U
lds
8= —
=
U
g*
f.
Ugs \
1 - 77—
\
Ugs fi J
avec
lds,s
A
go = -2—— > 0
Ugs fi
go étant de l'ordre de 1 mS , Ugsfi étant négative. Le schéma équivalent du transistor JTEC dans cette
zone est une source de courant commandée par une tension ; la grille est parcourue par un courant dont
l'intensité est négligeable de l'ordre de 1 pA (Fig. 7.49b).
247
Composants électroniques
f) Zone bloquée
La zone bloquée correspond à
— 0. La tension de grille est alors inférieure à la valeur de
blocage : Ugs ^ — C/^o • C'est l'équivalent de la zone bloquée dans les transistors bipolaires.
Remarque : Les caractéristiques des JTEC à canal p sont analogues à celles des JTEC à canal n . On
déduit les secondes des premières en inversant toutes les polarités, ce qui revient, dans
l'analyse, à remplacer toutes les tensions par leurs opposées. Les JTEC à canal p sont
beaucoup moins utilisés que ceux à canal n, car les trous sont moins mobiles que les
électrons, ce qui confère à ces JTEC une valeur plus grande de la résistance du canal.
VI. 2. — Transistors de type MOSTEC
La différence entre un JTEC et un MOSTEC provient de la grille qui, pour ce dernier, est isolée
du canal, par une très mince couche d'oxyde de silicium (SiOi), d'une épaisseur d'environ 10 nm.
Sa conception date de 1930, mais sa réalisation est plus récente, dans les années 1960, en raison des
difficultés de réalisation d'un excellent isolant.
a) Fonctionnement du MOSTEC
Il existe deux types de transistors MOS : dans les premiers, dits à appauvrissement, un canal entre
le drain et la source existe initialement, mais sa section diminue au cours du fonctionnement, d'où leur
nom (Fig. 7.50a) ; dans les seconds, au contraire à enrichissement, ce canal, initialement absent, se crée
au cours du fonctionnement, d'où leur nom (Fig. 7.50b).
La grille agit sur la conductivité du canal par effet capacitif, en la réduisant en régime d'appauvrissement, ou en l'augmentant en régime d'enrichissement.
Pour chaque type de transistor, le canal peut être dopé n ou p. Dans la suite, nous nous limitons aux seuls transistors à canal n, à appauvrissement ou enrichissement ; Ugs$ est négatif pour les
premiers et positif pour les seconds.
Les transistors MOS à appauvrissement peuvent fonctionner sous deux régimes : celui d'appauvrissement et celui d'enrichissement. En revanche, les MOS à enrichissement ne fonctionnent que sous
le régime d'enrichissement, seul capable de créer un canal entre le drain et la source.
Drain
Drain
SiCb
SiO?
Grille
Grille
Canal
J Source
Source
D
,
G
G
a) n—MOS à appauvrissement
Fig. 7.50.
b) n—MOS à enrichissement
248
7. Composants électroniques
Remarque : Les transistors MOS sont très sensibles aux charges électrostatiques qui peuvent s'accumuler sur la grille et ainsi créer des tensions pouvant entraîner la destruction de l'isolant.
Afin d'éviter les décharges électrostatiques, il est conseillé d'utiliser un bracelet anti statique qui relie le corps du manipulateur à la terre afin d'éviter toute accumulation de
charges lors des manipulations de circuits comportant des MOSTEC. C'est notamment le
cas pour les circuits numériques utilisés en informatique tels que les cartes mères d'ordinateurs.
b) Caractéristiques du MOSTEC
Les caractéristiques du MOSTEC sont semblables à celles des JTEC puisque les fonctionnements
sont analogues ; en particulier, le canal pouvant également se pincer, le courant
est alors quasiment
indépendant de Uds • Seules les valeurs de Ugs changent, puisqu'elles peuvent prendre des valeurs
positives. Sur la figure 7.51, correspondant à un transistor 2N 3819 à appauvrissement, on distingue
aisément les zones de pincement, ohmique et de blocage.
hs (mA)
Ids (mA)
L^=L5V
U8s=lV
24 -Enrichissement
/
U,s= 0,5 V
/
/
/
12 A
tds.s
t/tfï = 0 V
12 -ri,
Ues= - 0,5 V
i Appauvrissement
=— 1 V
/
< -3 V
Uds i^)
10
-2
-1
0
i
Mv)
Fie. 7.51.
c) Schéma équivalent
En zone de pincement, le MOSTEC est représenté par les schémas équivalents de la figure 7.52, à
basse et à haute fréquence respectivement ; les capacités parasites, qui apparaissent à haute fréquence,
sont beaucoup plus élevées que celles des JTEC, puisqu'elles sont de l'ordre du nE au lieu du pF.
Évidemment, les schémas équivalents n'ont de signification que pour les petits signaux variables autour
du point de fonctionnement, lequel, on l'a vu, est déterminé par la polarisation du transistor, en régime
stationnaire. Notons que la présence de capacités parasites non négligeables augmente les durées de
réponse des circuits.
Ids
G
tgs
f'ds
D
G
Ji
Ugs
Le
u
8 ss
S»a) A basse fréquence
b) A haute fréquence
FIG. 7.52.
Cds
Composants électroniques
249
VI. 3. — Montages de base avec des transistors MOSTEC et JTEC
Comme les montages sont similaires à ceux déjà étudiés avec des transistors bipolaires, nous nous
contentons de souligner les avantages des transistors à effet de champ, JTEC ou MOSTEC.
a) Polarisation
Avant tout, il est nécessaire de polariser le transistor JTEC, ce qui fixe les paramètres qui interviennent dans les schémas équivalents, notamment la transductance g . Comme pour les transistors bipolaires, la polarisation peut être économique (Fig. 7.53a) ou à pont de grille (Fig. 7.53b). Cette dernière
est, ici aussi, souhaitable car elle stabilise davantage le circuit, compte tenu de la disparité des caractéristiques des JTEC. Analogue à la polarisation par pont de base des transistors bipolaires, elle permet,
en outre, de polariser les MOSTEC à enrichissement, pour lesquels il est indispensable que la tension
UgX soit positive.
Rd
Ri
Rd
id
u
U
R..
I
1
a)
b)
Fig. 7,53.
Sur les schémas, les résistances Rg et R2 sont de Tordre de 1 Mfi ; quant à l'intensité I8 du
courant de grille, elle est comprise entre 10 et 100 pA, ce qui est très faible; comme la chute de
tension RgIg « 10 [xV est négligeable devant les autres tensions, on considère généralement que la
tension de la grille par rapport à la masse est nulle.
Les équations permettant de déterminer /<& , Ugs et Uds, à partir de R,/, Rs et des caractéristiques
du transistor, sont les suivantes (Fig. 7.53 et 7.47) :
U
Ugs — —RJds
E—
+ (Rs + Rd)lds
et
fds — Us,s
résolution graphique sur le réseau de caractéristiques est souvent très commode (Fig. 7.54) ;
i) la droite d'équation Ugs = —RJds coupe la courbe /^(t/^), précisément au point de fonctionient ; on obtient par simple lecture Us et Ugs,
u) sur la droite d'équation E = Uds + {Rs + Rd)Us, on obtient Uds, grâce à Us déterminé
:édemment.
250
7. Composants électroniques
A
Ids (m A)
Ids (mA)
12
12
Droite de charge
— [E — Uds) j {Rs + Rd)
Droite d'entrée*
Us = -VvlR\
i■
/ 1\
0
H
5
1
1
10
^
E
1
20
^(V)
UdsW)
FlG. 7.54.
-2
Ugs 0
b)
h) Montages amplificateur et suiveur
Comme les transistors bipolaires, les JTEC permettent de réaliser, soit un amplificateur inverseur
lorsque la source est commune, soit un suiveur si le drain est commun.
L'intérêt des transistors à effet de champ est la valeur très élevée de leur impédance entrée de l'ordre
de 1 GO. En revanche, le facteur d'amplification en tension est plus faible que celui des transistors
bipolaires, ce qui constitue un inconvénient sérieux.
Les montages sont très proches de ceux comportant des transistors bipolaires (cf. Exercices). Retenons la méthode :
0 la polarisation, c'est-à-dire le choix de Ids, Uds et f/?,v, permet de déterminer la transductan ce
g — ids/ugs ; les capacités des condensateurs de découplage dépendent évidemment de la fréquence des
signaux variables considérés,
ii) relativement aux signaux variables, on utilise le schéma équivalent habituel du transistor, dans
lequel le circuit de polarisation ne figure plus.
c) Générateur de courant
Le montage à grille commune est souvent utilisé comme source de courant dans les circuits intégrés, notamment pour réaliser les amplificateurs opérationnels (cf. chapitre 8). Il consiste simplement à
relier la grille à la source ( Ugs = 0 ) et à maintenir une tension Uds supérieure à Uds,s (Fig. 7.55a).
Le JTEC se comporte alors comme un générateur de courant, précisément entre Uds,s = 2,0 V et
Uds.c = 100 V dans le montage considéré. Notons que, dans une même série, les valeurs de Ids,s et de
Uds,s peuvent varier d'un facteur 5 .
Si l'on veut que le générateur débite un courant d'une intensité déterminée, il vaut mieux prévoir
un système d'ajustement de ce courant, comme dans le circuit de la figure 7.55b. La résistance R assure
une bonne stabilité du courant délivré, car une légère augmentation de Ids conduit à une diminution de
Ugs et ainsi à un affaiblissement de Ids . On se déplace alors parallèlement à l'axe des intensités sur le
réseau de caractéristiques Ids en fonction de Uds > lorsque Ugs varie. Le choix de R fixe
puisque :
Il suffit donc de résoudre l'équation du deuxième degré suivante, pour en déduire l'intensité Ids du
Composants électroniques
251
courant drain-source, en fonction de la résistance R :
J
— I
f] \
^ds ^
f1
-nit
I I
| r
i ^g5'0 — 0
ce qui donne, pour U8Sfi = —4,0 V , /<& 5 = 12 mA ci R = 670 fi : /^ = 3,0 mA .
i
f/,rfs
X
*^5
R,
fds
f/
f/
E
tWgs y
u,s*
G
j
r
rq
R
G
a)
b)
c)
FlG. 7.55.
En réalité, les courbes du réseau
en fonction de U^s, à Ugs constant, ne sont pas parfaitement
parallèles à l'axe des abscisses : le générateur de courant n'est pas idéal; il possède une résistance
interne
que l'on détermine en utilisant le schéma équivalent en signaux variables (Fig. 7.55c). En
effet, écrivons les relations entre la tension d'entrée u et le courant d'entrée i. Il vient :
u = r^O" — gUgs) — UgS
avec
Ugs = —Ri
d'où
u = i [r^v(l + Rg) + R]
On en déduit la résistance interne :
Ri
=
~7
=
q&O + Rg) + R
Avec R = 670 fi,
= 500 kfi et g = 3 mS , on trouve i?, = 1, 5 Mil, ce qui rend le générateur de
courant quasiment parfait.
CONCLUSION
Retenons les points essentiels.
1) Les composants de base d'un circuit électrique sont les conducteurs ohmiques et les condensateurs. Les premiers sont caractérisés par leur résistance, ainsi que par la puissance qu'ils sont capables
de dissiper. Conventionnellement, la valeur de la résistance est donnée par un code de couleurs peintes
sur le composant lui-même; l'une de ces couleurs indique l'incertitude relative. La capacité caractérise les seconds ; elle est le plus souvent inscrite sur le composant avec la tension de claquage.
2) Les bobines présentent des imperfections rédhibitoires (encombrement et coût) ; aussi sont-elles
de plus plus souvent remplacées par des montages à amplificateur opérationnel, capables de les simuler.
En revanche le transformateur, ensemble de deux bobines en forte interaction magnétique, est précieux,
car il permet de modifier la valeur de la tension ou du courant avec un rendement en puissance excellent.
3) Les diodes sont les composants non linéaires les plus répandus ; on les utilise surtout pour
redresser les courants alternatifs, pour stabiliser les tensions (diode Zener), pour la protection contre les
surtensions (thyristors) et pour le contrôle de puissance (triac).
252
7. Composants électroniques
4) Les piles et les accumulateurs sont évidemment des éléments essentiels, puisqu'ils fournissent
l'énergie nécessaire aux systèmes pour qu'ils puissent amplifier la puissance transportée par le signal
d'entrée. Ils sont caractérisés par leur f.e.m et la charge totale qu'ils peuvent débiter.
5) Les transistors sont les composants actifs élémentaires des circuits intégrés actuels. Les transistors bipolaires sont équivalents, en régime linéaire, à des générateurs de courant commandés par un
courant ; aussi les caractérise-t-on par le facteur d'amplification en courant /3 = ic/ib entre la base et le
collecteur. En régime non linéaire, ils se comportent comme des commutateurs.
6) Les transistors à effet de champ, JTEC et MOSTEC, sont, eux, des générateurs de courant
commandés par une tension. Ils sont plus faciles à fabriquer, d'où leur intérêt.
v
EXERCICES ET PROBLEMES
P7-1. Lampe à filament de carbone
On mesure la résistance d'une lampe électrique à filament de carbone, sur laquelle on lit 140 W ;
l'ohmmètre indique R = 588 fi, lorsque la température est 293 K. En fonctionnement normal, sous
une tension efficace de 230 V , la température du filament atteint 2000 K .
Calculer le coefficient de température du carbone supposé indépendant de la température; en déduire la valeur de la résistance du filament pour une température de 673 K.
P7- 2. Charge totale d'un accumulateur de caméra numérique
Sur la figure 7.56, on a représenté les courbes, fournies par un fabricant d'accumulateurs pour
caméra numérique, donnant l'évolution de la f.e.m d'une source lors d'une décharge à courant constant ;
la référence de l'accumulateur est HR14 et sa f.e.m nominale E = 1,2V. L'intensité du courant de
décharge correspondant est indiquée sur chacune des courbes ; elle varie entre 220 mA et 6 600 mA .
Calculer la charge totale que cet accumulateur peut débiter. À quel nombre d'électrons, cette charge
correspond-elle ?
£(V)
"D
f-\
1,4
£(V)
1,4
2 200 mA
en
"s_
CL
O
U
50
t (min)
b)
P7- 3. Détermination de l'inductance d'une bobine
Pour déterminer l'inductance L d'une bobine, on réalise un circuit RL série, que l'on soumet à
un échelon de tension Eq . On mesure, à l'oscilloscope, la durée caractéristique t = LjR : on trouve
Composants électroniques
253
r = 1,2 ± 0,2 jxs . Avec un ohmmètre, on relève que la résistance totale du circuit est R = 1,03 kfi à
1 % près. Une seconde méthode consiste à former un circuit série RLC très peu amorti, avec C = 22 nF
à 1 % près, que l'on soumet à l'échelon de tension Eq . On relève à l'oscilloscope la durée de dix
pseudo-périodes ; on trouve 300 ± 10 jxs .
1. Trouver la valeur de L en précisant l'incertitude dans chacune des méthodes.
2. Les résultats sont-ils compatibles ? Comparer la précision des deux méthodes.
P7- 4. Représentation d'une bobine réelle
V
A basse fréquence, une bobine réelle peut être représentée par l'association, en série, d'une inductance L et d'une résistance R.
1. Calculer l'impédance et l'angle de perte ô, pour les deux fréquences / = 50 Hz et / = 500 Hz,
sachant que L = 1,2 mH et R= 1,5 ff.
2. Détenniner l'intensité i{î) du courant dans la bobine, lorsque cette dernière est soumise à la
tension u{t) = um cos(W).
3. Pour des fréquences supérieures à 10 kHz, on ne peut plus négliger la capacité parasite qui
apparaît entre les spires et que l'on représente par un condensateur, de capacité C, en parallèle avec la
bobine précédente.
a) Établir l'expression de la nouvelle impédance Z' de la bobine.
b) Sachant que C = 10 pF, trouver la fréquence d'anti-résonance, c'est-à-dire la fréquence pour
laquelle le module de Z' est maximal.
P7- 5. Mesure de la résistance de fuite d'un condensateur
Dans le circuit de la figure 7.57, on ferme l'interrupteur Ki , l'interrupteur Ki restant ouvert.
Lorsque la charge du condensateur est tenninée, K\ est ouvert et K2 fermé. Après une minute, la
tension mesurée aux bornes du condensateur est U\ .
1. Sachant que la résistance de fuite du condensateur est négligeable devant la résistance interne Ri
du voltmètre numérique utilisé, calculer Ri pour £" = 10,0 V , C = 2,2 (xF et Ui = 0,54 V.
2. En réalité, le condensateur n'est pas parfait et on souhaite calculer sa résistance de fuite Rf . Pour
cela, on le charge jusqu'à la tension E : K\ est fermé et K2 ouvert; on ouvre alors
sans fermer
K2 . Une minute après, on bascule K2 et on lit la tension U2 = 8,29 V aux bornes du condensateur.
En déduire Rf et corriger la valeur précédemment obtenue de la résistance interne du voltmètre.
X
K2
R
C
FlO. 7.57.
254
7. Composants électroniques
P7- 6. Condensateur réel
Un condensateur, de capacité Q dans l'air, est rempli d'un diélectrique, dont la permittivité relative complexe £r admet l'expression suivante, en fonction de la pulsation de la tension sinusoïdale
appliquée :
(j)2r
—T
I
"7
' /
(x)^ — ù) + }(0/T
Dans cette écriture, la convention adoptée est celle des électroniciens, selon laquelle les retards de phase
sont comptés négativement :
Déterminer l'association de dipôles simples, résistor, condensateur et bobine, équivalente à ce
condensateur réel. Calculer la valeur de ces composants pour :
/r == 859.4 kHz
ZTT
fQ = ^- = 843,5 kHz
LIT
r = 7,14 ns
et
Cq = 5 pF
P7- 7. Quartz
Un quartz piézo-électrique peut être représenté par le schéma électrique de la figure 7.58.
A
1. a) Etablir l'expression de son impédance Z .
b) Exprimer la pulsation de résonance (j)r, pour laquelle Z = 0, et d'anti-résonance
par Z infini.
définie
c) Calculer (x)r et ii>ar, ainsi que les fréquences fr et far correspondantes, dans le cas suivant :
Cp = 9,55 pF
Cs = 7,5 x lO-15 F
et
Ls = 4,54 H
2. Dans quel domaine de fréquence, le quartz peut-il être assimilé :
a) à une bobine parfaite,
b) à un condensateur parfait ?
3. Quelle est la pente de la courbe représentant |Z| en fonction de la fréquence. Calculer sa valeur
à la fréquence de résonance.
4
Fig. 7.58.
P7- 8. Champ magnétique maximal dans un transformateur
Le primaire d'un transformateur, de N\ spires, est alimenté par une tension sinusoïdale, de fréquence / ; le secondaire possède, lui,
spires.
1. En négligeant la résistance des bobinages, montrer que le champ magnétique maximal est donné
par les expressions suivantes, dans lesquelles S désigne la section du circuit magnétique :
Composants électroniques
255
2. Un transformateur 230 V/6 V, dont la section du noyau est 5 = 7 cm2, doit fonctionner avec
une tension sinusoïdale, de fréquence 50 Hz , de telle sorte que le champ magnétique, dans le noyau, ne
dépasse pas 1,1 T. Quel est le nombre nécessaire de spires, au primaire et au secondaire ?
P7- 9, Réponse spectrale d'un transistor bipolaire en émetteur commun •web /
Sur la figure 7.59a, on a représenté un transistor monté en émetteur commun. Pour l'étude suivante
on adoptera le schéma équivalent au transistor de la figure 7.32 en admettant que les résistances R\ , Ri
et rco sont très supérieures à
et Rco .
R.; ■< ;
Co
rr)
Cbe
r'b
Us
T
b)
Fig. 7.59.
1. a) Établir la fonction de transfert en tension H = u^/u^, aux fréquences moyennes pour lesquelles les impédances des capacités de polarisation Ce et Cq sont négligeables.
b) Aux basses fréquences, l'impédance de la capacité Q n'est plus négligeable. Déterminer la
fonction de transfert et tracer le diagramme de Bode. Reprendre ensuite la question lorsque c'est l'impédance correspondant à la capacité Ce qui n'est plus négligeable.
2. Aux hautes fréquences, les capacités de polarisation Cq et Ce sont bien équivalentes à des
courts-circuits, mais la capacité parasite Cbe entre la base et l'émetteur n'est plus négligeable. En outre,
la résistance r/, est remplacée par r'b , en série avec rb . Le schéma équivalent pour les petits signaux
est alors celui de la figure 7.59b.
a) Établir la nouvelle fonction de transfert et tracer son diagramme de Bode.
b) Calculer les différentes fréquences de coupure pour fi = 150, rb = 1,0 kfî, r'b = 100 O,
Re = 2,0 kD, Rco = 1,5 kD, Cbe = 100 pF, Cq = 2,2 pJF et Ce = 220 pE.
P7-10. Transistor JTEC en haute fréquence
Lorsque la fréquence des signaux dépasse 1 MHz, il est nécessaire de tenir compte des capacités
parasites qui apparaissent entre les différentes jonctions du transistor JTEC. Le schéma du circuit et son
équivalent en signal variable sont représentés sur la figure 7.60. Entre le drain et la source du transistor,
la résistance de charge est Rc.
1. Déterminer les facteurs d'amplification en tension et en courant, respectivement :
7. Composants électroniques
256
Application : / = 1,2 MHz, Rc — 800 H,
et Cds = 0,6 pF.
= 1 jgds = 500 kfî, gm = 30 mS, Cgs = Cgd = 7 pF
2. Donner l'expression de l'impédance d'entrée Ze. Application numérique.
D
G
H7
ugs
Rr
D 'cl
i
Cgd
G*—>
Cgs
i'ds
Cds
Rc
"ds
t gm UgS
b)
a)
FIG. 7.60.
P7-11. Transistor JTEC monté en source commune
Sur la fiche technique d'un transistor JTEC à canal n, monté en source commune (Fig. 7.61),
on peut lire les valeurs suivantes : Ugs,o = —4,0 V et
= 12 mA. On souhaite polariser ce
transistor autour de Ug5 — —2,0 V et de
— 10 V . En ce point de fonctionnement, gm = 3 mS
et fds = 500 kfi . L'alimentation est une source stationnaire, de f.e.m E = 15,0 V et la résistance de
charge vaut Rc = 1,0 kO . En outre, l'intensité du courant de base étant de 100 pA , on fixe la valeur
de Rg à 1,0 MD .
1. Déterminer les valeurs de
, Rs et Rd .
2. Pour les petits signaux, trouver les valeurs des capacités afin que le montage fonctionne correctement à la fréquence / = 1,5 kHz , avec eo = 0.5 V et une résistance interne du générateur de
100 D.
3. Etablir les expressions des facteurs d'amplification en tension et en courant.
4. Calculer l'impédance d'entrée et de sortie du montage.
Rd
C'n
D
Co
Ids
G
L s
Rr
Ri
lie
Kg
Rs
Cs
e
g
Fig. 7.61.
us
8
Amplificateur opérationnel :
montages de base
C'est en 1947 que le terme amplificateur opérationnel, en abrégé AO. est mentionné pour la
première fois, et c'est en 1963 qu'il est conçu sous la forme d'un circuit intégré par B. Widlar. Il s'agit
d'un amplificateur différentiel destiné à effectuer des opérations fonctionnelles, d'où son nom.
En raison de son faible coût et de ses performances, c'est aujourd'hui un composant actif de base
considéré comme une brique élémentaire dans tous les montages actuels d'électronique.
Son champ d'application est considérable : il s'étend depuis le traitement de grandeurs électriques
issues de capteurs (microphones, thermocouples, photopiles, ...), jusqu'à la réalisation de signaux capables de commander des dispositifs aussi divers que des moteurs, des haut-parleurs, des résistors chauffants, des relais,...).
Dans ce chapitre, nous proposons une introduction à l'étude des amplificateurs opérationnels en
nous limitant à sa description et à son fonctionnement dans le cas idéal. Les imperfections de l'AO ne
seront abordées que pour interpréter les limitations qu'elles imposent aux montages réels.
^
o
c
o
(N
t-H
I. _ DESCRIPTION ET REPRÉSENTATION DE L'AO
1.1. — Description
L'amplificateur opérationnel est essentiellement un amplificateur différentiel, c'est-à-dire un amplificateur capable de fournir à sa sortie, une tension us directement reliée à la différence e — u+ — udes deux tensions d'entrée «4. et
.
CL
Sur la figure 8.1, on a représenté le symbole électrique normalisé de ce composant actif. On y dis,
,
•
,
•
*
tingue au moins cinq broches, ou plots de connexion : deux entrées respectivement notées 11+ et il- ,
une sortie us, une tension d'alimentation positive Ua et une tension d'alimentation négative —Ua.
Remarques : 1) Par convention, dans les schémas électriques des montages, on ne représente ni les
tensions d'alimentation, ni la connexion à la masse, ni les générateurs de tension à l'entrée.
2) Dans certains documents, on trouve encore l'ancienne représentation de l'AO par un
triangle.
258
8. Amplificateur opérationnel : montages de hase
U—
\\\\
\-Ua 7777
\\\\
FIG. 8.1.
La plupart de ces composants électroniques, fabriqués à partir de semiconducteurs, principalement
du silicium et du germanium, sont encapsulés dans différents types de boîtiers (Fig. 8.2a), ce qui assure
une connexion avec le circuit environnant, une bonne tenue mécanique et une isolation suffisante.
La fiche technique de l'AO penuet de situer les différentes entrées et sorties ; la broche numéro 1
est repérée conventionnellement par un point ou une encoche, la numérotation s'effectuant dans le sens
trigonométrique (Fig. 8.2b). La plupart des AO sont présentés dans un boîtier de huit broches ; l'AO est
seul ou apparié avec un autre AO (Fig. 8.2c).
Balance
1
U-
h
i
1—
s
1
-
NC
"M
Ua
«-,1
Sortie
"+4
1
8
-
«5,2
+
^
«-f
«-,2
+
+
-Ua
a)
Ua
4
—
5 "+,2
Balance —Ua 4
c)
b)
Fig. 8.2.
■a
o
c
^5
Q
(M
O
fM
's>CL
O
U
Remarques ; 1) Certains constructeurs fournissent des AO non encapsulés.
2) Les broches Non Connectées de l'AO sont notées NC.
3) Les deux connexions « balance » permettent d'équilibrer l'étage différentiel à transistors qui forme l'amplificateur différentiel. Dans certains boîtiers, les fabricants insèrent
un potentiomètre entre ces broches, afin que l'utilisateur puisse lui-même compenser une
éventuelle tension de décalage. Ce point sera développé dans l'étude des imperfections de
l'AO.
a
1.2. — Equations de fonctionnement d'un AO
Comme nous le verrons, un amplificateur opérationnel est généralement utilisé en ramenant, à l'une
de ses entrées, une partie au moins du signal de sortie. On réalise ainsi une rétroaction (cf. chapitre 13),
qui est négative ou positive ou selon que l'entrée est inverseuse ou non inverseuse. On dit que l'AO
travaille en boucle fermée.
Amplificateur opérationnel : montages de base
259
Auparavant, il est indispensable d'étudier l'AO en boucle ouverte, c'est-à-dire comme un système
sans rétroaction qui fournit une tension de sortie iis, lorsqu'on lui applique une tension différentielle e
entre les deux entrées.
Il n'est pas nécessaire de connaître la structure interne d'un amplificateur opérationnel pour en
déduire l'équation reliant us à e, en boucle ouverte. L'étude expérimentale montre que l'équation
différentielle suivante, linéaire d'ordre un, permet de décrire correctement le comportement de l'AO :
dwj
Tc-r- + «,. = Aoe
df
Notons que cette équation est aussi celle qui caractérise un filtre linéaire passe-bas de type RC (cf.
chapitre 6). La durée rc, constante de temps de l'AO, est de l'ordre de 10 ms. Quant au facteur
sans dimension Aq , sa valeur typique est comprise entre 104 et 107 . Il représente l'amplification
différentielle stationnaire. En effet, l'équation précédente devient, dans ce cas :
us = Ao(i/+ — «-) = Aoe
d'où
Aq = —
On voit que si «+ est reliée à la masse, us et m_ ont des signes opposés, d'où le qualificatif mvcr.ç^.çg
donnée à l'entrée correspondante. De même, si il- est reliée à la masse, us et w+ sont de même signe,
d'où le qualificatif non inverseuse donnée à cette dernière entrée.
Remarques : 1) L'AO étant un composant actif, la fonction linéaire entre la sortie et l'entrée différentielle ne peut être obtenue que sous réserve de le polariser grâce à deux sources de tension
stationnaires symétriques Ua et —U(l. Ainsi, la tension de sortie est limitée en amplitude selon la relation :
— Ua < us < Ua
soit encore
— Usal < us -fi UMi
avec Usa, tension de saturation, légèrement inférieure aux tensions de polarisation de
l'AO.
2) Afin d'éviter la saturation en courant, l'intensité is du courant de sortie doit vérifier la
condition :
tv ^ ts.max
avec is.max > intensité maximale du courant de sortie donnée par le fabricant.
3) On évitera une déformation du signal de sortie par saturation en vitesse en garantissant
une variation maximale de us au cours du temps, d'où la condition :
max
d Lis
df
^ v,
avec vm , vitesse maximale de balayage de l'AO, ou slew rate, (cf. paragraphe V).
260
8. Amplificateur opérationnel : montages de base
1.3, — Réponse d'un AO en régime sinusoïdal
En régime sinusoïdal, à la tension d'entrée e(t) = em expijojt) en notation complexe, correspond
la solution us de la forme :
Usit) = Us,m exp(/^0
avec
u^m = ii5ym expijfis)
En injectant cette forme de solution dans l'équation différentielle, et en simplifiant par exp(jojt), il
vient :
(1 +jù}Tc)usm = Ao€m
d'où
A =
= -
+ jcOTc
On en déduit le module et l'argument de A :
|d| = {l + ^2r2)i/2
et
4)s = — arctan(it>rc
ce qu'il est commode d'écrire en fonction de la pulsation ou la fréquence réduite x = co/ù)c
avec :
1
1
r
0}c= — et fc =
Tr
ITTTr
f/fc ,
On a alors :
4o
141 = (I+.t2)1^
et
--
(})s = — arctanx
car
4W =
4o
l+jx
Les diagrammes de Bode correspondants sont représentés sur la figure 8.3. Ils ont même allure que les
diagrammes de Bode des filtres passifs passe-bas déjà étudiés (cf. chapitre 6). Rappelons que l'on utilise
non pas la variable x mais X = Igx et que Ton introduit le gain en tension Gi( = 201g \A \. Cependant,
dans le cas présent, TAO étant un système actif, le gain passe par une valeur maximale qui n'est pas
nulle mais qui vaut :
(Gu),mix = 201g/\o
soit
201g 106 = 120dB
pour
Aq = 106
fi (rad)
Gu (dB)
100-
X= Igx
—tt
-7r/2-
V
Igx
Fie. 8.3.
Sur la figure 8.3, on identifie aisément la fréquence de coupure à —3 dB , égale à fc, pour laquelle le
gain vaut {Gu)max - 3 en dB.
Dans le cas d'un AO, une autre fréquence caractéristique, dite de transition, présente de l'intérêt,
celle pour laquelle le gain GH est nul. Le facteur d'amplification étant alors égal à l'unité, on a, en
désignant par fr cette fréquence :
4o
:i +j?/fsy
/2
= 1
d'où
f =/(?(Aq — l)1^2 ~fcAo
Amplificateur opérationnel : montages de base
261
Comme G,t est une fonction décroissante de la fréquence, f, représente la fréquence de transition entre
le mode d'amplification, pour lequel G,, > 0, et le mode d'atténuation de l'AO, défini par G(< < 0.
Remarques : 1) Les constructeurs donnent généralement à fi le nom de produit facteur d'amplificationbande passante PAB (gain-bandwidîh product en anglais).
2) L'identification de la fréquence de coupure fc est immédiate lorsque la fonction de
transfert A{f) est exprimée sous la forme canonique :
Aif) =
A-jf/fc
Aussi, est-il judicieux de s'y ramener systématiquement. Par exemple :
A(f) =
10s
2000 + j200/
5 x 104
_
I +;7/10
implique /c = 10 Hz et Aq = 50 000.
1.4. — Schéma électrique de PAO
Aux propriétés précédentes de PAO, il convient d'ajouter l'impédance d'entrée, l'impédance de
sortie et l'intensité maximale du courant de saturation.
a) Impédance d'entrée de l'AO
C'est l'impédance entre les entrées -|- et — de PAO. Dans la bande passante de l'amplificateur,
c'est souvent une résistance Re dont la valeur s'échelonne de 100 kfi à 10 MO .
b) Impédance de sortie
C'est l'impédance interne du générateur, de f.e.m commandée Aqc , placé en sortie de PAO. Dans
la bande passante de l'amplificateur, c'est une résistance Rs. Sa valeur varie entre 10 et 100 fl ; pour
PAO LM741, par exemple, elle est de 75 fi.
c) Saturation en courant
La structure interne d'un AO limite la valeur maximale du courant en sortie, ce qui protège des
courts-circuits. Cette valeur iS;mciK est de l'ordre de 20 à 80 raA pour un AO typique.
En pratique, on peut déterminer ce courant de saturation en connectant une charge résistive variable en sortie de PAO ; en diminuant cette charge, à partir d'une certaine valeur, apparaît un écrêtage
(symétrique ou non) du signal, correspondant à une saturation en courant.
Sur la figure 8.4a, on a représenté le schéma équivalent de PAO avec l'ensemble de ses caractéristiques. Un tel schéma présente deux avantages : il facilite l'analyse du système; en outre, il permet de
prendre en compte l'impédance de charge. En effet, la connexion d'une impédance de charge Zc modifie la tension de sortie mS)CO , qui existerait en l'absence de cette impédance, selon l'expression donnée
par le diviseur de tension :
Zr + Rs
262
8. Amplificateur opérationnel : montages de base
t>
+
Rs
R.
u+
U—
7777"
////
h-
e=0
m
Z
Ae
u+
Uk
7777"
7777"
a)
U—
(D
7777
////
b)
Fig. 8.4.
1.5. — Régime linéaire et régime saturé
Le graphe donnant, en régime stationnaire, la tension de sortie us que donne l'AO lorsque la
tension différentielle d'entrée e varie, est représenté sur la figure 8.5.
On distingue trois zones de fonctionnement, suivant les valeurs de la tension d'entrée :
0 une zone de saturation négative ; us — — Usat pour e < — Usat/Ao ,
n) une zone de saturation positive : iis = Usat pour e ^ Usnt/Ao ,
iii) une zone intermédiaire, pour —Umt/Ao < e < Usat/Ao , qualifiée de linéaire, car us = Aoe.
Cette relation us = Aqe implique, en raison de la très grande valeur de Aq et de us limité par Ua
de l'ordre de 10 V , une tension différentielle quasiment nulle :
6~0
La figure 8.4b représente le schéma équivalent de l'AO idéal, dans lequel le générateur de f.e.m Ae est
remplacé par un générateur parfait de f.e.m u5.
On voit que cette approximation ne peut être satisfaite que si la tension de sortie est toujours
inférieure ou égale aux limites de tension Usât e,: — Usat imposées par les tensions d'alimentation
Ua et —Ua avec une différence en partie liée à la tension base-émetteur des transistors constituant le
composant :
avec | Usa{ | < |
|
|%| ^ |Usai
us.
UaT1
Usât
0
O
£
1
Modèle idéal
Usat/Ao
e
Usai
-u;
FIG. 8.5.
Les propriétés des montages en boucle fermée découlent du type de rétroaction, positive ou négative, laquelle conditionne la stabilité du montage (cf. chapitre 13). En effet, dans l'équation différentielle
en boucle ouverte de l'AO réel :
dus ,
.
tc—
1- us — A^e
at
Amplificateur opérationnel : montages de base
263
la rétroaction intervient selon :
e = M_j. — w_ = ue± a iis
a étant un facteur positif compris entre 0 et 1, ue la tension d'entrée et us la tension de sortie.
Avec le signe +, la rétroaction est positive ; avec le signe — , elle est négative. On en déduit l'équation
différentielle suivante de l'AO en boucle fermée :
y + M5^l - =b40Q^ = MUe
Puisque Aq»
1, cette équation admet une solution générale de la forme :
= K exp
V
iAocv —
Tr
où K est une constante détenninée par les conditions initiales. Comme la fonction exponentielle diverge
si le signe est +, on en conclut que les montages à rétroaction positive fonctionnent en régime de
saturation de l'AO, contrairement aux montages à rétroaction négative.
1.6. — Amplificateur opérationnel idéal
Les hypothèses associées à l'AO idéal sont :
i) un facteur d'amplification Aq infini,
ii) une impédance d'entrée infinie (par rapport aux impédances utilisées dans le montage), ce qui
suppose que les intensités des courants d'entrée soient nulles,
iii) une impédance de sortie nulle (par rapport aux impédances utilisées dans le montage),
iv) une fréquence de coupure infinie, c'est-à-dire rc = 0 et donc A = Aq . Compte tenu des
valeurs typiques de fc, quelques dizaines de Hz, cette hypothèse semble difficilement justifiable ; nous
reviendrons sur ce point un peu plus loin dans l'analyse des imperfections de l'AO.
On résume ces hypothèses par le symbole oo à côté du petit triangle, lequel donne le sens d'utilisation de l'AO.
Avec les progrès récents dans la réalisation technologique des AO, le modèle idéal s'avère très
efficace, au moins dans une première approche à la fois théorique et expérimentale qui est celle que
nous adoptons ici.
II. — ELECTRONIQUE NON LINEAIRE AVEC AO
II. 1. — Comparateur simple
Le système représenté sur la figure 8.6 fournit une tension de sortie iis égale à ±(/w,. En effet, si
la tension différentielle e — ue^ —Ue,2 est positive, soit uei\ > ue 2 , alors le point de fonctionnement se
situe dans la zone de saturation positive et ux = Uxa! ; dans le cas contraire, ue_ \ < ue_2 et us = —Usat
(Fig. 8.7), d'où le nom du montage :
us = Usat
si
Ue,] > ue,2
et
us = -UsaT
si
ue,] < uei
264
8. Amplificateur opérationnel : montages de base
On voit que si, l'on impose à l'une des deux tensions d'entrée, par exemple uep , d'être nulle, alors ce
montage devient un détecteur de signe pour l'autre tension ue_\ :
Usa,
pour
et
M,,,] > 0
-Usa,
pour
< 0
Il arrive souvent que les tensions extrêmes atteintes par us ne soient pas symétriques, bien que les
tensions d'alimentation le soient. Dans ce cas, on remplace la notation ±Usa! par USa,,+ et Usa[irespectivement.
Us l
Usât
Us.
Ue,2
Ue, 1
-Us.
7777
Fin. 8.6.
—
7777
Usai -
FIG. 8.7.
Exemple : connectons sur les entrées + et — du montage comparateur de la figure 8.6, respectivement les f.e.m E\ = \, 607 V et £2 = 1,605 V de deux piles A A, pour lesquelles le constructeur indique 1,5 V, L'AO choisi est un LM741, avec f/(, = 15 V et — f/ff = —15 V . En visualisant la sortie
du montage avec un multimètre, on mesure ms = 14 V = Usât avec £1 > £2, alors que, si on permute
les deux piles on trouve
= —13,5 V . Dans ce cas concret,
= 14 V et Usa^_ = —13,5 V.
Remarques : 1) En associant les variables logiques binaires 1 et 0 aux tensions de saturation Usa,,+
et Usât - . on exploite le régime saturé de PAO dans les montages de l'électronique numérique (chapitre 19).
2) Le montage comparateur est largement utilisé dans les Convertisseurs Analogiques
Numériques dits instantanés (cf. chapitre 19).
b) Application à la surveillance d'alimentation
Dans les systèmes embarqués (téléphone portable, ordinateur portable, véhicule, satellite, etc.) une
chute du niveau d'alimentation de la source d'énergie (piles ou accumulateurs), peut s'avérer désastreuse : pertes d'information dans les mémoires, dysfonctionnement du système, etc.
Un exemple de surveillance d'un niveau de tension stationnaire est présenté sur la figure 8.8. Supposons que l'on souhaite détecter une chute de 20 % de la tension Ucc , en utilisant une diode Zener de
type BZX55-5,1 avec f/z = 5,1 V pouvant dissiper une puissance maximale de 500 mW.
X
"
Ri
7777
4
u
ra
Rd
777T 7777
A Uz
7777
FIG. 8.8.
tL
7777
Amplificateur opérationnel : montages de base
265
La tension différentielle à rentrée du comparateur est reliée à Uz et à Ucc par :
6 — W-j-
U— — Uz
Me — Uz
„
„ Ucc
K] + iv2
en utilisant la division de tension. La tension de sortie us du montage comparateur basculera de —Usa,
à USÛ/, lorsque la tension iie de l'entrée inverseuse deviendra inférieure à Uz. ha diode électroluminescente, connectée en sortie, s'éclairera donc si :
Ue < Uz
Ucc < [1
soit
+
^J
Uz
Avec les résistances R\ = 21 kO et R2 = 20 kfi, dans la série £24, le seuil de détection Ue = Uz
est obtenu pour une tension d'alimentation minimale Ucc,m qui vaut :
V1
+
2ôJ5'I~12V
Quant à la résistance de polarisation Rp de la diode Zener, déterminons ses valeurs minimale et maximale :
i) sa valeur minimale Rppn est obtenue pour le courant maximal Îm correspondant à la puissance
maximale que peut dissiper la diode, soit :
Vm
0,5
100mA
d'où
R,
Ucc - Uz
100 n
1m
ii) sa valeur maximale RP)m est donnée par le courant minimal nécessaire pour polariser la diode
Zener dans le cas le plus défavorable de la chute maximale de tension de 20%, soit Ucc,m — 0. Sf/cc ;
en supposant Im = 5 mA, on trouve :
Rn m —
-Uz
1380 n
Ainsi, avec Rp = 470 fi, on réalise la polarisation de la diode. Pourvu que la chute de la tension
d'alimentation de 20 % n'affecte pas le fonctionnement de PAO en comparateur, le système peut être
utilisé pour déclencher une procédure d'alarme. Un tel type de montage est utilisé pour surveiller le
niveau de la batterie d'un téléphone portable, ou encore pour déclencher une procédure de sauvegarde
dans un ordinateur portable. Dans ce cas, le circuit est qualifié de superviseur de microprocesseur.
Remarque : Il existe des composants qui réalisent directement la fonction de surveillance de tension
d'alimentation ; citons par exemple la référence TCM809R du fabricant Microchip, dont
le seuil de détection est 2,63 V.
II. 2. — Comparateur à hystérésis ou bistable ou trigger de Schmitt
Le comparateur simple présente l'inconvénient d'être sensible aux fluctuations dues au bruit qui
accompagne nécessairement toute tension de référence (cf. chapitre 17). Aussi lui préfère-t-on le comparateur à hystérésis. C'est un système bistable car il présente deux états stables Usa! et — Usal, qui
passent de l'un à l'autre lorsque la tension différentielle d'entrée e varie faiblement autour de la valeur nulle ; € joue le rôle de déclencheur, d'où leur nom anglais trigger qui signifie gâchette. On l'appelle aussi trigger de Schmitt, du nom de son inventeur américain Otto Schmitt, en 1934, alors qu'il était
encore étudiant !
266
8. Amplificateur opérationnel : montages de base
a) Comparateur non inverseur
Le comparateur non inverseur, représenté sur la figure 8.9a, est constituée par un AO, dont la
tension de sortie us est appliquée sur l'entrée non inverseuse à travers la résistance R2, ce qui permet
d'effectuer une rétroaction positive, d'où son fonctionnement en régime de saturation.
Afin d'analyser son fonctionnement, exprimons la tension différentielle d'entrée, en fonction de ue
et Us, à l'aide du théorème de Millman appliqué à l'entrée non inverseuse :
e = M+ —
= M+ =
UejRx + Us/Ri
Ri
i/R\ + 1/^2
^1 +^2
tic +
^1 +-^2
avec iis = USa[ ou us = —Usa,, selon que e est positif ou négatif.
i) Si initialement iis = Usar, alors la tension différentielle d'entrée vaut :
Ri
e=
R]
:
R\ A- R2
R\ A- R2
Pour que us bascule en —Usat, il faut que :
p
e < 0 soit ue < — — USai ce qui s'écrit
ii) Inversement, si initialement us
U.sat
ue < un
avec
Il 11 —
avec
Hp —
^irr
r. tJ sat
*<2
-Usai, alors :
uf, —
6 =
U.sat
^1+^2
Pour que us bascule en Usat, il faut que :
e>0
soit
Ri
ue > — Usat
Ri
ce qui s'écrit
u» > u■p
n
Ai
tJ sat
Sur la figure 8.9b, on a représenté le graphe donnant us en fonction de ue , dans le cas où Usnr = 14 V ,
R\ = l kO et i?2 = 2 kfl. Lorsqu'on part de la valeur us = Usat = 14 V obtenue pour ue suffisamment grand, et que l'on diminue progressivement ue , on voit que iis garde la valeur Usa, tant que
ue > u,, = —7 V ; le basculement vers us = —Usat = —14 V se produit alors. Si on change alors de
sens de variation de ue en l'augmentant, iis garde sa valeur —Usat tant que ue < up — 7 Y. li y à
alors basculement de us vers la valeur L!sat. Le graphe décrit par le point figuratif est donc un cycle
dont le sens de parcours est le sens trigonométrique entre deux points extrêmes situés dans les quadrants / et ///. On dit que l'on a réalisé un comparateur à d'hystérésis, ce mot étant issu d'un mot grec
signifiant retard de la variation de us par rapport à celle de ue.
Usai • ' Us
'1
y
(
R]
Up = —ri
Usât
Kl
t=-^-Usa,
'
K2
-Usât
Bistable «non inverseur»
b)
a)
FlG. 8.9.
Ue
Amplificateur opérationnel : montages de base
267
Remarques : 1 ) Notons que, pour un < ue < iip , il existe deux états possibles, mais la tension de sortie
us conserve sa valeur, laquelle valable, pour m,, = 0 , se maintient tant que les tensions
d'alimentation de PAO sont maintenues, comme c'est le cas pour la mémoire vive (Read
Access Memory) d'un ordinateur.
2) Dans les matériaux magnétiques, l'hystérésis traduit le retard de son aimantation volumique M par rapport à l'excitation magnétique H (cf. Électromagnétisme).
b) Comparateur inverseur
Le comparateur inverseur diffère du précédent car la tension d'entrée ue est appliquée sur l'entrée
inverseuse (Fig. 8.10a). Comme précédemment, exprimons la tension différentielle d'entrée e = m+ U- . Il vient, par division de tension :
R\
e = u+
— u_ = —
us — ue
+
R^+Ri
avec ils = Usai si 6 > 0 et us = — Uxal si e < 0.
i) Supposons que us soit égal à Usat. Il vient :
Ri
-
«l+iî2£/s<"
"f
Le basculement de us vers — Usat se produira lorsque e deviendra négatif, soit :
e <0
d'où
R
ue > —
— Usat
Ri + /?2
ce qui s'écrit aussi
+
avec
iip = —
R
— Usa,
+ R2
n U.
Ri
Ri
ue > up
U,
*-
[>00
Ue
-
Un =
Ri
Ri
R2
U,
Up
Bistable inverseur
7777
Ri
Us.
R\+R2Usa'
—Usât
b)
a)
Fig. 8.10.
u) Inversement, si us = —Usat, il vient :
Ri
R\ -\- R2
Usât
Ue
Le basculement de us vers Usat interviendra pour :
e > 0
soit
u. <
Ri
Ri + Rj
Usat
ce qui s'écrit aussi
ue < un
avec
u,, =
Ri
R] + R2
U.sar
Sur la figure 8.10b, on a représenté le graphe donnant us en fonction de ue, dans le cas où
Usar = 14 V, /?( = 1 kO et R2 = 2 kFl. On obtient un cycle d'hystérésis décrit dans le sens horaire entre deux points extrêmes situés dans les quadrants II et IV.
268
8. Amplificateur opérationnel : montages de base
Remarque : Si l'on supprime la rétroaction positive en choisissant pour R2 une valeur très grande, les
deux seuils u}ln et u
Upp se confondent e
en une valeur nulle. On retrouve alors la caractéristique du montage comparateur simple.
c) Commande de basculement
On réalise le basculement du système d'un état à l'autre, à l'aide d'une impulsion de tension avec
les propriétés suivantes :
i) l'amplitude est supérieure au niveau du seuil,
ii) la durée prend en compte l'inertie de basculement liée aux constantes de temps du montage,
iii) enfin, le sens de la tension d'impulsion est déterminé par l'état précédent du système.
II. 3. — Comparateurs monostables ou univibrateurs
En insérant dans les montages précédents, par exemple le comparateur inverseur, une source de
tension stationnaire, de f.e.m E (Fig.8.1 la), il est possible de provoquer une translation du cycle d'hystérésis, dans le plan ( ue, us ), de telle sorte qu'il n'y ait plus qu'un seul point d'intersection entre le cycle
et l'axe ue = 0, et donc un seul point de repos stable (Fig.8.11b) ; le comparateur devient alors monostable.
' Us
Ri
Ri
+
-
Usa,
[>OÛ
Un
-
lie
Up
Ue
X
Usa,
a)
b)
Fig. 8.11.
Afin d'analyser le fonctionnement de ce comparateur monostable, exprimons, à l'aide du théorème
de Millman, la tension différentielle e = u+ — ii- . Il vient, avec £ > 0 :
u
+
=
wç//?2 — E/R\
-, /T>
1/R2 + l/i?l
et
U— = lle
d'où :
R\
Ri
E,
6= —
— us — —
—E
— ue
R\ -\- R2
R\ -\- R2
i) Si us = Usat, alors :
R\
e=
Ri
— usa, - -——^ E - Ut
R[ + R2
Ri + R2
Le basculement de la tension us de t/ra/ vers — Usa, se produit lorsque e devient négatif. Par conséquent :
rr — —
r — u <K)
^ (\
Uçn,
—E
P
RiER2~sat
Ri+R2^
"e
d ou
ue ^
> up
avec
tt , — —
rr
up = ——
U
—E
sa
R\ + R2
R\ A- R i
Amplificateur opérationnel : montages de base
269
ii) En revanche, si us = —Usa,, alors :
T1sae
U
€ —
Rl+R2
zr — lie
t
Ri+Ri
Le basculement de la tension us de — Usat vers Um! se produit lorsque e devient positif, c'est-à-dire
pour :
R\+R2
Usât
Ri
E — ue > Q
R\+RI
soit
ue < u,,
avec
u,, =
K\
Usa,
RXERI
/?2
E
RX+RI
Dans notre hypothèse où E est positif, u,, est négatif.
Un tel comparateur est monostable si up est négatif, car il n'y a pas alors de point d'intersection
entre le cycle et l'axe ue — 0 . On en déduit la condition suivante sur la f.e.m E :
£> ^-£/sa,
El
Lorsqu'une tension d'entrée ue négative est appliquée, le système peut basculer en us = Usat, mais
revient en — Usat, dès que ue devient supérieure à up , condition vérifiée si
= 0 et
<0.
À la différence du comparateur bistable qui nécessite deux tensions de basculement, le montage
monostable n'exige qu'une seule tension de basculement, celle à la sortie d'un capteur par exemple.
Remarque : En associant un condensateur et un montage bistable, on réalise un montage astable qui
est un oscillateur de relaxation (cf. chapitre 14).
II. 4. — Comparateur monostable avec constante de temps
On réalise de tels comparateurs avec constante de temps en insérant un condensateur, de capacité
C, dans la branche de rétroaction (Fig. 8.12). On augmente ainsi la durée du retour vers zéro de la
tension d'entrée ue, ce qui présente d'intéressantes applications. Par exemple, dans l'ouverture d'une
barrière de parking, de tels systèmes permettent de laisser suffisamment de temps à un conducteur pour
manœuvrer après l'introduction de son titre de paiement ; on trouve aussi ce mode de fonctionnement
dans un minuteur d'extinction de lumière, dans la gestion de l'éclairage d'un habitacle de véhicule ou
encore dans la fermeture des portes d'ascenseurs.
uc
x
7777
Fig. 8,12.
Supposons que la tension d'entrée soit nulle, sauf lors du déclenchement par une impulsion négative. A l'état de repos (ue = 0), la tension de sortie est us = —Usât \ Ie condensateur est
270
8. Amplificateur opérationnel : montages de base
chargé et, comme aucun courant ne traverse les résistances R] et Rj,
uc = uc,o =
tension à ses bornes est
s = Usât ~ E ■ L'état de repos est bien stable puisque :
— u
e = u+ — w_ = —E — ue{t = 0) = —E <0
et
us{t = 0) = —Usa1
Le système bascule instantanément dans l'état us = Umt si :
6 = m_i_ —
= —E — ue > 0
soit
ue < —E
et reste dans cet état, tant que U+ = —E-\-R\z > 0. Il appaïaît ainsi nécessaire d'analyser l'évolution de
i(t). Pour cela établissons l'équation différentielle à laquelle satisfait l'intensité i. La loi des tensions
appliquée à la maille extérieure donne :
—E E R\i E Rii — uc ~ iis = 0
avec
iis = —Usat
et
i = —C
d tic
dt
En dérivant par rapport au temps l'équation de maille précédente, on obtient :
t+ z — 0
avec
t = (R\ E RjjC
dont la solution s'écrit (cf. chapitre 4) /(/) = A exp {—t/r), A étant une constante que l'on détermine
en exprimant la continuité de la tension aux bornes du condensateur :
ucit = 0) = -E+ (R, + R.Jiit = 0) - U„, = -£ + (R, + R,)A - Ua, = Ust„ - E
R[ E R2
Le re-basculement intervient à l'instant (2 pour lequel e devient négatif, c'est-à-dire :
E
u+(t2) = 0 = -E E RiHh)
soit
z(r2) -
E\
Le condensateur se décharge à travers les résistances R\ et /?? •
R\
R\ E R2
exp
d'où
tj = {R\ -f ^jLln
2^1 Usai
(RiER2)E
Avec Ri = R2= 10 kLt, C = 10 p,F, Usar = 13,5 V et E = 4,5 V , on trouve /2 = 0,22 s .
III. — ELECTRONIQUE LINEAIRE A BASE D'AO
En régime linéaire, les amplificateurs opérationnels sont utilisés dans la zone de la variation linéaire
de la tension de sortie en fonction de la tension différentielle e . On réalise un tel régime en effectuant
une rétroaction négative de la tension de sortie, ou d'une partie de celle-ci.
En boucle fermée, avec une rétroaction négative, PAO présente une nouvelle fonction de transfert
H{jcû) = T_{f) qui dépend de sa fonction de transfert en boucle ouverte. C'est ce que nous préciserons
dans une étude générale ultérieure sur les systèmes bouclés (cf. chapitre 13). La rétroaction provoque
une réduction importante du facteur d'amplification Aq , ce qui est souhaitable, puisque une valeur de
Aq de l'ordre de 105 implique une tension d'entrée inférieure à 100 p.V, c'est-à-dire de l'ordre de
grandeur d'une tension de bruit (cf. chapitre 17). Dans ce qui suit, nous présentons des montages bâtis
autour d'AO idéaux en régime linéaire.
Amplificateur opérationnel : montages de base
271
III. 1. — Amplificateur non inverseur
a) Facteur d'amplification en tension
Le montage amplificateur non inverseur est celui représenté sur la figure 8.13a dans lequel l'AO
étant idéal, on a e = 0. En utilisant la division de tension, il vient :
M_ =
^1+^2
us
avec
ue
soit
u+ - ue
et
m+ =
On en déduit :
Us
1 +
^
+
Ry
V
«.(V
+
^2
0^
-1,83
Ue
7777
Ri
Ri
a)
b)
Fig. 8.13.
Supposons que l'on souhaite fixer le facteur d'amplification en tension A,, du montage à 11, soit
= 201g 11 = 20,8 dB . On dispose d'une seule équation Rj = 10/?i pour déterminer les valeurs
de R\ et R2 . Néanmoins l'hypothèse de l'AO idéal qui a conduit à cette relation, suppose l'utilisation
de résistances, d'une part inférieures à l'impédance d'entrée Re considérée comme infinie, d'autre paît
supérieures à l'impédance de sortie Rx considérée comme nulle. Aussi les résistances sont-elles choisies
dans la gamme du kfL, par exemple R\ = 1 kfi et /G = 10 kfl.
Remarques : 1) Un couple de résistances R\ = 10 H, R2 = 100 fi, avec des tensions de l'ordre
de quelques volts ( Ua de 10 à 20 V ), donnerait en outre des courants de sortie de
l'AO d'intensité supérieure à l'intensité maximale is^max tolérée par le composant (cf.
Exercices).
2) On sait que les résistances sont données dans certaines gammes de valeurs, séries El2 ,
E24, E48 , E96, avec une tolérance variant de 5 % à 0,1 % et aussi des fluctuations
qui dépendent de la température. Aussi, à faible coût, il serait vain de tenter de construire
un amplificateur non inverseur avec un gain strictement égal à 11 !
b) Vérification expérimentale
On réalise un montage de facteur d'amplification théorique égal à 11 , en utilisant un AO type
LM741C, polarisé par les sources externes Ua = 15 V et — £/rt = —15 V.
272
8. Amplificateur opérationnel : montages de base
Avec un signal d'entrée sinusoïdal, de fréquence 2 kHz, on constate que le signal de sortie est en
phase avec le signal d'entrée et présente une amplitude environ 11 fois plus grande, la mesure donnant
Au = us,mlue,m ^ Ij 83/0,17 « 10, 8 dans le cas de résistances données avec une précision de 10 %
(Fig. 8.13b).
Avec un signal d'entrée de forme carrée, on mesure sur la figure 8.14a, un facteur d'amplification
Ai( sa 1,9/0,17 sa 11,2, même si, en analysant soigneusement la transition, on observe une déformation
du signal de sortie. Cette distorsion dépend de F AO utilisé. La raison de cette déformation du signal sera
analysée plus loin (cf. paragraphe V).
uAV)
V)
u,{V)
«Ç(V)
13,70
M.,
-13.40
a)
h)
Fig. 8.14.
En augmentant l'amplitude du signal d'entrée, on constate sur la figure 8.14b une saturation en amplitude. Soulignons que les niveaux de saturation ne sont pas symétriques, Usa{<+ = 13,7V et
USat,- = —13,4 V, avec des valeurs absolues inférieures à
= 15 V . L'amplitude maximale ue^nax
du signal d'entrée, qui permet d'éviter la saturation du montage, est alors donnée par :
Hp m/7 y
min(f/ra?,+ , |Usât,— |)
| Usa!,—
An
13,4
10,8
L 24 V
ce qui est inférieur à sa valeur théorique égale à Ua/Au = 15/11 = 1,36 V . Ces relevés expérimentaux ont été obtenus dans une configuration où aucun courant n'est débité par F AO, puisque la charge
connectée en sortie est infinie. On peut alors prédire l'évolution de la tension de sortie, en fonction de
la charge Rc connectée, par simple prise en compte de la division de tension :
lie =
R,
A,m.
Rc + Rs
La limite de validité de cette relation demeure la capacité de FAO à fournir l'intensité du courant demandé is = Us/Rc > pour Rc faible (Fig. 8.15a). En pratique pour un AO type 741 , is,max est de l'ordre
de 25 mA.
Dans notre exemple, la valeur minimale théorique de l'impédance de charge Rc est donnée par l'expression :
min(t/sfl?)+, It/jA^-l)
\USat,-\
| 13,4|
= 536 O
Rcjniu —
is,max
i.ï,max
0,025
Pour vérifier l'effet de la saturation en courant, dérogeons à la condition précédente en connectant une
charge Rc < Rc,mm avec Rc = 235 fi, et en choisissant ue^m < ucmax afin d'éviter la saturation en
amplitude, soit ue,m = 0,72 V .
Amplificateur opérationnel : montages de base
273
uP V)
XOO
oo
ue
-- 6,60
0,72—/r.
777/
7777
7777
5,80
7777
a)
b)
FIG. 8.15.
Sur la figure 8.15b, on voit que, dans le cas d'une saturation en courant, la tension de sortie us est comprise entre —5,8 V et 6,6 V, ce qui est nettement inférieur à la valeur théorique
«.v — AnUçjn — 7,8 V .
Remarque : À la saturation en courant, la tension us peut légèrement différer de Rc is,max de par la
mise en conduction de protections internes de l'AO contre les courts-circuits.
III. 2. — Suiveur de tension ou adaptateur d'impédance en tension
a) Facteur d'amplification et impédances
V
8
+
L'amplificateur suiveur de tension, représenté sur la figure 8.16, est le plus simple des dispositifs
à rétroaction négative, puisque cette dernière se réduit à un simple fil de connexion reliant la sortie de
l'amplificateur à son entrée inverseuse.
1
i
7777
7777
Fig. 8.16.
Dans l'hypothèse d'un AO idéal, la tension différentielle d'entrée e est nulle :
e = U+ — il- = 0
avec
= ue
et
m_ = us
On en déduit le facteur d'amplification en tension du montage :
Au = — = \
soit
Gu = 201g 1 = 0 dB
Bien que l'amplification par le composant se réduise à l'unité, à condition évidemment qu'il soit polarisé convenablement, ce montage simple est probablement l'un des montages les plus utilisés en électronique, en raison de impédance d'entrée pratiquement infinie et de son impédance de sortie pratiquement
274
8. Amplificateur opérationnel : montages de base
nulle :
Z,, = —
avec
L
0
d'où
Z,
oo
et :
Zs = -fi
avec
ue — 0 —
— «_
et
iis = «_
d'où
=0
Ces deux dernières propriétés permettent de connecter des systèmes entre eux, sans chute de tension,
et donc d'assurer une association des systèmes en cascade. La fonction de transfert globale est alors
le simple produit des fonctions de transfert de chaque système. On dit que le montage suiveur est un
adapteur d'impédances en tension.
Remarque : Avec un AO réel, on obtient le même résultat (cf. Exercices).
b) Applications du suiveur
i) Augmentation de la résistance interne d'un voltmètre
Sur le montage simple de la figure 8.17a, mesurons la tension aux bornes du générateur stationnaire, de f.e.m E = 12 V et de résistance interne /?? = 10 kfi, à l'aide d'un voltmètre de résistance
Rv = 20 kfi, On trouve, d'après la division de tension :
R,
U = E= 8V
Ro + Rx
U
Rv
R„
E
h-'+
oc
7777
7T7T
a)
b)
FlG. 8.17.
En insérant un AO monté en suiveur, comme sur la figure 8.17b, on mesurerait, puisque la tension
aux bornes du voltmètre est égale à la tension d'entrée et que l'intensité du courant à l'entrée de l'AO
est nulle :
Us = Ue = E- RgI = E = 12 V
ii) Suppression de la résistance interne d'un GBF
Un générateur basse fréquence (GBF), de f.e.m maximale em et de résistance interne Rj, débite
un courant dans une charge Rc (Fig 8.18a).
La résistance interne du générateur n'étant pas négligeable, la valeur maximale de la tension aux bornes
de Rc ne vaut pas em mais, par division de tension :
Rr
tirc w
m —
'
Rc + Ri
m
s
Evidemment le générateur de tension doit être conçu pour débiter un courant d'intensité maximale
ic,m ~ em/Rc sans subir de dommage.
Amplificateur opérationnel : montages de base
275
Ri
H.
4^1PN
i
Rc Uc
1
7777
7777
a)
b)
FIG. 8.18.
En intercalant un montage suiveur de tension comme sur la figure 8.18b, la tension uc^m vaut :
Uc,m = ue = em - Rii
avec
i=0
d'où
us>m = e,„
On dit qu'il y a adaptation d'impédance en tension.
Notons que l'AO doit alors délivrer un courant iSjm qui doit être inférieur à l'intensité maximale
is,max du courant que peut délivrer un AO standard, de l'ordre de 20 m A.
Ordres de grandeur : si em = 2Y, /?, = 50 fi et /?c = 200 fl, alors :
^in — I; 6 V
Me,!» —
En revanche, si
M s, m —
—2V
et
is,m —
0
— 10 mA
= 12 V , /?, = 1 kfl et Rc = 5 fl, on trouve
5
5 -f 1000
12 se 60 mV
l
x,m
12 V
mais
12
i^m = — = 2,4 A
ce qui est bien supérieur à l'intensité maximale que peut délivrer un AO. Pour diminuer ce courant, on
insère, dans la boucle de rétroaction négative, avant la charge Rc , un montage push-pull à transistors
(cf. chapitre 7) de facteur d'amplification en tension unité (Fig. 8.19).
8
+
^
■-
_L
Mv = U,.
-Ua
Fig. 8.19.
III. 3. — Amplificateur inverseur
Dans le montage inverseur représenté sur la figure 8.20, l'entrée non inverseuse est connectée à
la masse, ce qui impose
= 0 et donc w_ = 0. Il vient, puisqu'un même courant parcourt les
résistances R\ et /?2 :
276
8. Amplificateur opérationnel : montages de base
Le facteur d'amplification en tension étant négatif, le signal de sortie est en opposition de phase par
rapport au signal d'entrée, c'est-à-dire que le déphasage est tt , d'où le nom du montage. Notons que
R\ représente l'impédance d'entrée du montage amplificateur inverseur :
-=Ri
h
Cette résistance doit être très supérieure à l'impédance de sortie du générateur pour satisfaire à l'adaptation d'impédance en tension, explicitement pour que le signal d'entrée ne subisse aucune atténuation de
tension. Typiquement, on choisit le couple de résistances R\ = 10 kfi et Rj = 100 kfi, ce qui donne
un gain Gu = 201g 110| = 20 dB .
X
ue
u*
7777
7777
7777
Fig. 8.20.
Remarque : Pour que le courant sur l'entrée non inverseuse au nœud E soit quasi nul, PAO doit
compenser le courant d'entrée ie, lequel est limité à la valeur maximale /vnax du courant
de sortie. On en déduit la valeur minimale de la résistance R\ :
R I .min
.
u
III. 4. — Convertisseurs courant-tension et tension-courant
a) Convertisseur courant-tension
La conversion courant-tension s'avère indispensable lorsqu'on utilise des capteurs dont la sortie
électrique est un courant (capteurs photoélectriques, capteurs chimiques, etc.). Le traitement du courant
issu de ces capteurs, par des chaînes à base d'AO, nécessite une conversion courant-tension (Fig. 8.21).
Un convertisseur courant-tension idéal réalise l'opération :
us — —RtI i.le
dans laquelle R] est la îrans-résisîance.
-H
0X
7777
7777
FIG. 8.21.
7777
7777
7777
FIG. 8.22.
Amplificateur opérationnel : montages de base
277
b) Convertisseur tension-courant
La figure 8.22 représente un convertisseur idéal tension-courant. La rétroaction négative permet de
réaliser un fonctionnement en régime linéaire, soit 6 = 0, d'où la relation entre la tension de sortie et
le courant is dans l'impédance de charge :
iis — Rfis
L'AO étant idéal, le courant entrant dans l'entrée inverseuse est nul, la totalité du courant is parcourt la
résistance R[ :
. ^
.
iie
ue — R i is "h € — R ] is d ou is — —— et z's- <C i.s.max
R[
Ainsi, le convertisseur tension-courant idéal est le système qui réalise la fonction :
is = VtUe
où Y, = IjR\ est la trans-admiftance.
Remarque : D'autres systèmes de conversion courant-tension et tension-courant existent (cf. Exercices).
III. 5. — Sommateur
Sur le montage de la figure 8.23 où l'AO est monté en sommateur, appliquons le théorème de
Millman aux deux entrées de l'AO. Il vient, respectivement, avec les notations de la figure :
_ «e,l /-^l + UegjRl
+
"
~
l/i?, + l/i?2
_
6
"
u fi/?3
~ l/R-i + l/Ri
Il en résulte, puisque e = 0 :
/,
^3^
Ri
lie = ( I -f- —— 1
—- Ue 2 ~\—
^~Ue 1
V
R4j[R\+R2 '
R{-YR2
Notons que les résistances R\ et Rj permettent de pondérer la somme des deux tensions, amplifiée par
et R4 . Pour R] = R2 -, l'expression se simplifie, on voit que la tension de sortie est proportionnelle
à la somme des tensions d'entrée :
^1 +
(uej -f Ugg)
si
Ri — R2
Remarque : Les résistances R^ et R4 fixent le gain du montage, alors que R\ ci Ri déterminent
l'impédance d'entrée sur la borne non inverseuse. Il en résulte que les résistances R\
et R2 doivent être à la fois inférieures à l'impédance d'entrée Re de l'AO, et suffisamment grandes devant l'impédance interne des sources de tension à l'entrée, afin d'assurer
l'adaptation d'impédance :
R\
ZjhA
et
Ri^Zjbp
Zrh,i et Zjih2 étant les impédances internes des deux générateurs de Thévenin à l'entrée
non inverseuse. Lorsque l'adaptation d'impédance n'est pas réalisée, on intercale, entre
les générateurs de Thévenin et ces résistances, un suiveur de tension.
278
8. Amplificateur opérationnel : montages de base
"C'A
7777
U
e,2
UeA
Ri
7777
7777
7777
Ri
lie,2
Ri
7777
R4
TÀtt
FIG. 8.23.
Ra
FIG. 8.24.
III. 6. — Soustracteur
Sur la figure 8.24 on a représenté un AO dans un montage soustracteur, fonctionnant en régime linéaire. Appliquons le théorème de Millman aux entrées inverseuse et non inverseuse. Il vient respectivement ;
_ He, 1 /R1 + Us/Ri
l/Rt + I/R2
Il en résulte, puisque e = u+ —
U+
Ueg/Rs
' I/R3 + I/R4
=0 :
R2
R\
_
6
R\
R2
He I A*
R\
R4
z" Us — —
—— Lie 2
R2
i?3 + /?4
soit ;
f. , RA ( *4
l, +/?,j U W*'2
Ri
^
Rx+RiUe'x)
On fait apparaître la différence des tensions ue,2 — ^e,\ en imposant la condition suivante :
R4
/?3 + i?4
Ri
R\
R2
SOit
/?4(/?| + /?2) — RliRl 4" ^4)
OU
R]R4 — R2R2
On a alors :
d"où la propriété de soustraction du montage :
Ro .
us = — [iig -> — ue \ )
R]
avec
^|i?4 — R2R3
Remarque : Pour des signaux de faible amplitude, ce montage exige un compromis car la résistance
R\ , qui représente l'impédance d'entrée sur la borne inverseuse, doit être, d'une part, assez
grande pour assurer l'adaptation d'impédance avec le générateur ue^ , d'autre part assez
faible pour que le facteur d'amplification soit suffisant. Aussi, dans ce cas utilise-t-on un
autre montage, appelé amplificateur d'instrumentation (cf. chapitre 9).
Amplificateur opérationnel : montages de base
279
III. 7. — Intégrateur
Bien avant l'avènement des calculateurs numériques, un moyen pour résoudre les équations différentielles consistait à câbler les termes de l'équation avec des montages à base d'AO, puis à identifier la
solution. Le montage intégrateur que nous allons présenter réalise la fonction d'intégration d'un signal.
a) Montage intégrateur
Ce montage est semblable au montage amplificateur inverseur, mais on a remplacé la résistance
de contre-réaction par un condensateur de capacité C (Fig. 8.25). Rappelons que les éléments R Ql C
sont ceux qui définissent un filtre passif passe-bas (cf. chapitre 6). Comme l'AO est idéal, le courant
qui parcourt la résistance R est aussi celui qui charge le condensateur. On peut écrire, si q désigne la
charge de l'armature proche de l'entrée inverseuse :
iie
dq
R
àî
= —-1
C
avec
On en déduit :
d us
d/
=
u
T
soit
1 f
us = —
ue{t) dt
K
en posant
r = RC
K étant une une constante qui prend en compte la charge initiale du condensateur. On obtient bien us
à partir d'une intégration de ue à un facteur multiplicatif près ; ce dernier étant négatif, le montage
intégrateur est inverseur, d'où un déphasage de tt entre le signal d'entrée et le signal de sortie.
Remarque : La modification qui consisterait à remplacer le résistor par une bobine et le condensateur
par un résistor, conduirait aussi à l'intégration de la tension d'entrée. On obtient cependant
des résultats médiocres, car il n'existe pas de bobine purement inductive, en raison des
effets parasites résistif et même capacitif.
R'
C
oc
R
ue
uc
7777
7777
Fig. 8.25.
[>
+
7777
ji
Us
7777
FIG. 8.26.
h) Réalisation du montage intégrateur
Le montage précédent présente un inconvénient majeur : il amplifie considérablement les signaux
stationnaires ou de basse fréquence ; en effet l'impédance offerte par la capacité est alors très grande,
d'où un facteur d'amplification Alt = —Zc/R capable de provoquer la saturation de l'AO à partir d'un
simple signal de bruit à l'entrée. Pour y remédier, on ajoute, en parallèle avec le condensateur, un second
résistor (Fig. 8.26). La nouvelle résistance R' permet en outre au condensateur de se décharger et donc
d'annuler la constante d'intégration K précédente.
L'équation, vérifiée par us, devient alors, en notant qu'ici le courant d'entrée se partage entre deux
branches, celle de C et celle de R' :
280
8. Amplificateur opérationnel : montages de base
Il en résulte :
dus
Us
—
1—- =
A
f
t'
dr
r'
ue
avec
nt
r = RC
et
f
•
r =RC
Pour un signal d'entrée ue, de période 7, on a :
i) Si T <C r', alors dnj/dr
solution :
Usjr' et l'équation initiale se réduit à à.us/ d/ = —uejr, de
la constante d'intégration étant nulle puisque le condensateur s'est déchargé grâce à R'.
Ordre de grandeur : avec /? = 10 kO, C = 10 nF, R' = 1 MO, on trouve r = 0,1 ms,
t' = 10 ms ; la fréquence des signaux à intégrer doit donc être suffisamment grande devant
I/r' = 100 Hz.
ii) Si 7» r', alors d«v/df <C us/t' , d'où la tension de sortie
« —{R'/R)ue. Ce résultat est
conforme à l'analyse en régime stationnaire : le condensateur étant équivalent à un circuit ouvert, on est
en présence d'un montage amplificateur inverseur de facteur d'amplification —R'/R .
c) Exemple d'intégration expérimentale d'un signal
On applique, à l'entrée d'un intégrateur, un signal périodique carré, de période 7, de valeur
moyenne nulle et d'amplitude f/o • Ce signal peut se mettre sous la forme d'une somme de signaux sinusoïdaux associés aux harmoniques impairs, de périodes 7, 7/3, • • • ,7/(2m + 1), et d'amplitudes
cr, ûf/3, • • • , a/{2m -f 1), avec m entier positif et a = AUq/tt (cf. annexe 2).
Concrètement, soit à intégrer un signal carré ue, de fréquence 23,2 kHz et d'amplitude
f/o = 1 V, par l'ensemble C = 150 pF et 7 = 15,5 kfl (Fig. 8.27a). La tension de sortie us représente effectivement au signe près l'intégrale du signal iie car le montage intégrateur est inverseur. La mesure de la pente, associée à la primitive de la fonction d'entrée qui est une constante, donne
438 mV • fis-1 , à comparer avec la valeur théorique qui vaut Uq/t = 440 mV • jxs-1 .
En revanche, on note la présence d'une forte composante stationnaire qui tend à saturer le signal de
sortie. En utilisant une résistance Rf = 2 Mil en parallèle avec le condensateur, on supprime une partie
de la composante stationnaire, et on retrouve l'intégration avec une forme d'onde quasi symétrique,
puisque la condition 7 <C r' est respectée : 7 = 43 jxs et r' — 300 /jls (Fig. 8.27b).
Us (V)
Ue (V)
11
Ue (V)
US (V)
1-- r7 =|43
! jxs
--2,6
1
t
4-7,6
b)
FIG. 8.27.
Amplificateur opérationnel : montages de base
281
Remarque : Nous analyserons ultérieurement plus en détail le fonctionnement de ce montage intégrateur, en prenant en compte les imperfections de l'AO (cf. chapitre 9).
III. 8. — Dérivateur
a) Montage dérivateur
Alors que le montage intégrateur est réalisé à partir d'un filtre RC passe-bas, le montage dérivateur
l'est avec un filtre CR passe-haut (Fig. 8.28a). Comme le courant qui traverse le condensateur est le
même que celui qui parcourt la résistance, puisque l'AO est idéal, on a :
àq
le = — =
Qt
Us
K
avec
„
q = Cue
Il en résulte
d ue
us
—
1
=0
d/
r
avec
_
r = RC
d ou
lie = —T
due
~â7
Ainsi, la tension de sortie est proportionnelle à la dérivée de la tension d'entrée par rapport au temps,
d'où le nom du montage.
J
M.V)
X-(V)
-- 0,36
0,2
30
0,2
T = 2 ms
-0,38
7777
7777
*■ t
a)
Fig. 8.28.
h)
b) Illustration expérimentale
Sur la figure 8.28b, on a représente la réponse du montage dérivateur à un signal d'entrée, de forme
triangulaire, pour /? = 10 kO et C = 100 nF, soit r = RC = 1 ms. On obtient bien la fonction
dérivée, de forme carrée et de valeur moyenne nulle.
On peut réduire les oscillations observées, en adoptant le montage de la figure 8.29a, où l'on ajoute
une résistance R' en série avec la capacité. Le résultat affiché sur la figure 8.29b, pour R' = 250 fl,
illustre bien l'influence de cette résistance.
Remarque : En pratique, les applications du montage dérivateur restent limitées, car tout bruit superposé au signal d'entrée provoque une forte variation du signal de sortie. Un exemple est
fourni par le capteur équipant les airbags ; on ne dérive pas la vitesse du véhicule pour obtenir l'accélération, mais on mesure directement cette dernière, à partir de la variation
d'une capacité entre une masse et des structures mobiles usinées dans le silicium. Ces
capteurs équipent la plupart de nos véhicules depuis le début des années 1990.
282
8. Amplificateur opérationnel : montages de base
uAV)
(V
M.,
-- 0,36
0,2
R
UT
0,2—
Ug
T = 2 ms
-0,36
a)
b)
Fig. 8.29.
III. 9. — Amplificateur logarithmique
a) Description du montage
Dans le montage de la figure 8.30 on a placé une diode dans la boucle de rétroaction négative
d'un AO. On sait que la caractéristique courant-tension de la diode id{ud), s'écrit, lorsque la diode est
passante (cf. chapitre 7) :
irf — h expiai-1
où Is est l'intensité du courant de saturation de la diode et Ut = ^bT/c ,T étant la température absolue,
kft la constante de Boltzmann et e la charge électrique élémentaire. Dès que
3Ut , la diode est passante et on peut faire l'approximation :
soit
id ~ h exp
u
d =
est supérieur à environ
u
t In (^j-
Sur ce montage où l'AO fonctionne en régime linéaire, on a :
Ud = -Us
et
ue
id = —
K
Par conséquent, pourvu que la diode soit conductrice, on trouve la relation suivante entre la tension de
sortie et la tension d'entrée :
us = —Ut In
ue
ce qui justifie le nom du montage.
Remarque : Les grandeurs îx et Ut dépendent toutes deux de la température T mais pas de la même
façon ; alors que Ut est proportionnel h T, Is est proportionnel à T3. La fonction logarithmique obtenue avec ce montage n'est donc pas utilisable dans une large gamme de températures. Rappelons qu'on impose aux systèmes électroniques de supporter des plages en
température allant de 230 K à 400 K ou plus parfois, comme c'est le cas dans les systèmes chargés de contrôler l'injection dans un moteur thermique. On contourne ce problème, en remplaçant la diode par deux transistors câblés en diode. Ces transistors doivent
absolument être appariés, c'est-à-dire fabriqués dans le même substrat semi-conducteur,
afin de présenter le même courant de saturation Is (cf. chapitre 9).
Amplificateur opérationnel : montages de base
283
l-W
7777
7777
7777
Fig. 8.30.
7777
FIG. 8.31.
III. 10. — Amplificateur exponentiel
L'amplificateur exponentiel ressemble à l'amplificateur logarithmique mais le résistor et la diode
ont été pennutés (Fig. 8.31). La diode est passante pourvu que la tension ue soit positive et supérieure
à sa tension de seuil ; l'égalité des courants, qui parcourent alors la diode et le résistor, donne :
■ «L
1 exp j( — \1 =
^
.
soit
yyj Sexp (I —
Ue
us = —RI
en inversant la fonction. Ainsi la tension de sortie est proportionnelle à l'exponentielle de la tension
d'entrée, d'où le nom de l'amplificateur.
Remarque : La présence de la diode à jonction rend ce montage sensible à la température, ce qui devra
être compensé (cf. chapitre 9).
III. 11. — Multiplieur
Le multiplieur est un système qui fournit à sa sortie une tension us proportionnelle au produit des
deux tensions ue^ et ue2 que l'on applique à ses deux entrées :
Us = Km Ue^ i Uep
où Km est un coefficient homogène à l'inverse d'une tension ; son symbole est représenté sur la figure 8.32.
Bien que souvent réalisé à l'aide d'étages à transistors, le multiplieur peut aussi être construit avec
des AO, en associant en cascade un amplificateur logarithmique, un amplificateur sommateur et un
amplificateur exponentiel. On s'appuie alors sur la relation : a x h = exp(ln<2 + ln/p), dans laquelle
a et b sont deux réels positifs. Ainsi, en l'absence de saturation de l'étage exponentiel, on obtient le
produit de deux tensions.
Très utilisé dans la transmission des signaux, le multiplieur permet de réaliser notamment la modulation de signaux (cf. chapitre 16).
K
X
Ue.2
Km «c,! "«,2
7777
7777
Fig. 8.32.
284
8. Amplificateur opérationnel : montages de base
Sur la figure 8.33, on distingue aisément les trois étages qui assurent successivement les fonctions
logarithme, somme et exponentielle. Les tensions d'entrée uet\ et uet2 étant positives, les tensions
en A et Zî, en sortie du montage logarithmique, avec l'interrupteur K ouvert, ont pour expressions
respectives :
Ue, I
Me,2
et iig = — f/?- In
m,4 = — Uj In
\RIs,\ J
\RIs,2
Tandis qu'en sortie du sommateur inverseur, la tension en P est positive :
up = —{uA + Mg) = f/r In f ^rr-} + UT\n^ 116,2
RI.s,\
RI.s,2
Si les intensités des courants de saturation sont identiques, /5j = Is>2 = fi, ce que l'on réalise en
utilisant des diodes appariées, c'est-à-dire fabriquées sur le même substrat, on obtient :
n i fue,\Me2\
up=uTln{ -Wir)
avec
iieA >0
et
ue^ > 0
Par conséquent, la tension de sortie du troisième étage, s'écrit, avec K ouvert :
us — —Rfi exp ( jÇ- ) = —Rfi exp In
\UtJ
fit y/ ^ | fit g m 0
soit
iis —
Me, 1 Me2
Rfi
Cependant, cette fonction multiplication n'est pas réalisable en pratique, car on atteint très facilement
la tension de saturation du montage. En effet, la faible intensité du courant, de l'ordre de 1 nA, rend le
terme quadratique Rrïl très faible et donc la fonction exponentielle rapidement croissante.
X
«4',1
A "
UA
7777
7777
K/
y..
Ue.l
B "
7777
UB
UP
7777
li
7777
7777
FIG. 8.33.
En revanche ce problème disparaît si l'on ferme l'interrupteur, puisque, le facteur d'amplification
en tension du montage sommateur valant alors —1/2, on a :
1 /
.
x
Ut \ f UeA ue,2\
Up = - -{uA +UB) = — ln ^ R2l2 J
d'où, l'interrupteur K étant fenné :
Ms = -Rfi exp f ^ j = -Rfi exp
( lle | lle 2 A ^
et
^ = -(>^,1^,2)
1/2
Amplificateur opérationnel : montages de base
285
Ainsi, en connectant simplement en parallèle une seconde résistance identique à la résistance R de
rétroaction négative, on évite la saturation. On obtient alors la fonction racine carrée du produit des
deux signaux d'entrée.
Une façon de réaliser la fonction multiplication consiste à remplacer le coefficient Km = 1/{RIs)
trop grand et donc responsable de la saturation par un coefficient Km plus faible. Pour cela, ajoutons
le terme Uj ln(7?fv/E) en entrée du sommateur inverseur, dans lequel E est la f.e.m d'un générateur
stationnaire. La nouvelle expression à la sortie P du sommateur ne fait plus apparaître {Ris)2 mais RIS
(Fig. 8.34) :
up = UT [ln(uej «e,2) - 21n{R/s)] + UT\n(R!s) - UTln{E) = C/rln
Il en résulte la tension suivante à la sortie du multiplieur, dans laquelle figure F à la place de RIS :
Ms —
Me, 1 Me^2
^
—
„
&-mue,\ Me>2
avec Km = E 1 . Cette fonction multiplieur étant indépendante de Ut et îs, elle est en outre peu
sensible aux variations de température.
<?. i
UA
1 1
7777
7777
7777
R
CO
X
8
i
7777
UB
7777
P "
ri
7777
HP
7777
+
7777
Us
7777
Fig. 8.34.
Remarques : 1) Le choix de la résistance R s'effectue en définissant le courant nécessaire à la polarisation des diodes ; la valeur /? = 10 kfî , très inférieure à l'impédance différentielle d'entrée
de PAO, permet la circulation d'un courant dont l'intensité est de quelques mA .
2) On prendra soin de placer des capacités de découplage sur les tensions d'alimentation
des AO afin de limiter l'influence des perturbations inductives entre les composants.
286
8. Amplificateur opérationnel : montages de base
IV. — REALISATION D'IMPEDANCES A L'AIDE D'AO
On utilise souvent les AO pour réaliser des impédances, ou des fonctions d'impédances très utiles
dans la conception des filtres actifs ou des oscillateurs.
IV. 1. — Réalisation d'une résistance négative
Sur la figure 8.35, on a représenté un système se comportant comme une résistance négative (NIC,
en anglais pour Négative Impédance Converter en anglais). On suppose l'AO idéal et R
R2 .
En régime linéaire, la tension différentielle e est nulle, d'où, en utilisant l'additivité des tensions
et la division de tension :
R
ue = R]ie + us et ue =
Ri + R
Il en résulte, en éliminant us :
ue = R]ie
Ro
R
R
ue
.
soit
R')
ue— = —Riie
R
On en déduit l'impédance équivalente du montage :
iie _
Ri
Z
'-Te---RR;
qui est réelle et négative. En choisissant R\ = Ri ex R variable on obtient une résistance négative —R
ajustable.
X
A?
'2
777/
7777
7777
Fig. 8.35.
Remarques : 1) Physiquement, on aura compris ici le rôle essentiel de PAO qui, comme élément actif,
puise, dans les sources d'alimentation stationnaire, l'énergie nécessaire pour compenser
et dépasser les pertes de puissance électrique par effet Joule.
2) En outre, on aura noté que, pour R\ = Rifies intensités ie et *2 des courants qui
pénètrent dans PAO par sa sortie S sont égales (Fig. 8.35). Aussi le résister, de résistance
R, est-il parcouru par un courant qui, grâce à PAO, est orienté dans le sens opposé au sens
habituel en l'absence d'AO, d'où l'effet de résistance négative.
3) Un des domaines d'application des résistances négatives est la réalisation d'oscillateurs,
dans lesquels on doit compenser les pertes par effet Joule (cf. chapitre 14).
Amplificateur opérationnel : montages de base
287
IV. 2. — Système se comportant comme une impédance
Le montage représenté sur la figure 8.36 est un système qui se comporte comme une impédance.
Il est construit autour d'un seul AO, en rétroaction avec les trois dipôles passifs d'admittances Yy , Y2 ,
F3. L'impédance qui en résulte est le quotient Ze = ue/ie.
Y3
1
Fig. 8.36.
LAO étant idéal et travaillant en régime linéaire (6 = 0), l'application du théorème de Millman
au point E donne :
ueYi + usY3
ue = ——
——
Y] + F3
avec
v
ue = u~ = 0
d ou
Fi
us = ——ue
F3
Écrivons au point A la loi des nœuds. Il vient, les courants d'entrée dans l'AO idéal étant nuls :
ie = is + Ô
d'où
ie = {ue - Us)Y2 + UeYi
En reportant dans cette équation l'expression de us, on trouve :
1- Fj j
ie — Ue 1 F2 H——
F3
d'où
Fe — ( F2 H—+ F|
F.
Suivant la nature des admittances F/, le montage est un simulateur d'inductance ou de capacité.
i) Simulateur d'inductance
Si l'on choisit Fj = 1 /Ry , Fo = 1 /R2 , F3 = jCco , il vient :
K = 3i?i
avec :
+
3R2
1
jR 1R2CÙ)
R1R2
R,- = —
3R\
R2
et
.
soit
11
Fg = — +
Ee
.iEeo)
Lg = R1R2C
Ainsi, l'impédance d'entrée du montage est un résistor de résistance Re placé en parallèle avec une
bobine de grande valeur d'inductance Le.
Exemple : pour R\ = R2 = \ kFi et C = 1 (xF, on trouve Rt = 500 H et Le = 1 H, ce qui est
énorme pour une inductance.
H) Simulateur de capacité
En choisissant Y\ = jCco, F2 = 1/^2, F3 = l//?3, on trouve l'expression suivante de Fadmittance
d'entrée ;
Y
' = i
1
11)
288
8. Amplificateur opérationnel : montages de base
ce qui se met sous la forme ;
Y
e=
-éjCeù)
avec
R( = R2
et
Ce = C
L'impédance d'entrée du montage se présente donc sous la forme d'un résistor, de résistance Re = R2 ,
placé en parallèle avec un condensateur de capacité C,, = C(1 + R3/R2) ■
Exemple : pour R2 = 1 kfi, R3 = ]0 kfi et C = 1 p^F, on trouve Re = 1 kfl et Ce = 11 jxF,
ce qui est une grande capacité.
IV. 3. — Réalisation d'une inductance positive de grande valeur
On peut aussi réaliser de grandes impédances à l'aide de la structure connue sous le nom de Convertisseur d'Impédance Généralisée (GIC en anglais pour Generalised Impédance Converter) (Fig. 8.37).
Dans les conditions habituelles de fonctionnement de FAO idéal, on a :
Ue = Us
Z, le = Z2/2
^-t
Z3?2 —
^4/5
Il en résulte le facteur d'amplification en courant suivant :
^ _ fi _
ie
Z, Z3
Zj Z4
Comme iis = —Zcis et ue = iis, on en déduit l'impédance du montage :
ry
tle
~T~
le
^ Z\Z3
C y ry
^2^4
Exemple : si l'on choisit Z\ = Z2 = Z3 = R, Z4 = l/(JCco) et Zc = r, l'impédance d'entrée est
une bobine pure, d'inductance L = RCr. Pour R = 5 kfi, r = 0.5 kfi, C = 0,5 p,F, l'inductance
vaut 1,25 H, ce qui est énorme, surtout si l'on songe à l'encombrement d'une bobine réelle, de même
inductance.
Z\
Z\
>4
Z2 Z3
+
+?2
rn
^1.
Fie. 8.37.
V. — IMPERFECTIONS DE L'AO EN REGIME VARIABLE
La figure 8.38 représente le schéma constitutif le plus simple d'un AO à transistors bipolaires. On
reconnaît successivement :
i) en entrée, un étage différentiel de très forte impédance d'entrée,
ii) un étage amplificateur,
Amplificateur opérationnel : montages de base
289
iii) un étage de sortie en push-pull (cf. chapitre 7), lequel permet d'augmenter le courant de sortie
de l'AO et donne une impédance de sortie très faible.
Les différents étages sont réalisés avec des transistors en technologie bipolaire ou CMOS, selon les
caractéristiques et les perfonnances souhaitées.
Ce montage met en évidence les limites du modèle de l'AO, précisément la saturation en tension
l%| ^ |Usa!| avec \Usat\ ^ Ua , la saturation en courant is ^ i.s,max et la valeur de la fréquence de
coupure /C)t, due à la présence de capacités.
Étage
amplificateur
Etage
k. différentiel .A >
«+
777/
'
7777
-U.
Etage
push-pull
7777
Fig. 8.38.
V. 1. — Limitation en fréquence et bande passante
Dans tous les exemples précédents, l'amplificateur opérationnel était considéré comme un composant idéal caractérisé par la relation simple us = Aqe avec Aç, de l'ordre de 105. En réalité, on a vu
que l'AO en boucle ouverte se comportait comme un filtre passe-bas du premier ordre, avec une excellente approximation :
A(f) =
1 +jf/fc.o
où fc,o est de l'ordre de 10 Hz. Comme Aq est très grand, il est quasiment impossible de déterminer
expérimentalement le diagramme de Bode de l'AO, c'est-à-dire son gain en tension et sa phase en
fonction de 1g/.
En revanche, on peut illustrer la limitation spectrale d'un AO en boucle fermée avec rétroaction
négative. Dans le cas d'un montage non inverseur avec le couple de résistances, 1 kH et 100 kfl, le
facteur d'amplification en tension vaut Au = 100 , c'est-à-dire que Gf( = 40 dB .
En faisant varier la fréquence du signal d'entrée sinusoïdal, on remarque que ce montage ne remplit
sa fonction que dans un intervalle de fréquences du signal d'entrée.
Pour l'AO type LM741C, le facteur d'amplification est encore de 100 à / = 1 kHz , mais il ne vaut plus
que 59 à / = 15 kHz (Fig. 8.39a) et 11 à / = 150 kHz (Fig. 8.39b) ; cette décroissance se poursuit
aux fréquences plus élevées. En outre, dès que le gain n'est plus égal à 100, apparaît un déphasage
entre le signal de sortie et le signal d'entrée qui se stabilise vers —tt/I rad.
En utilisant l'OPA 2604, on observerait le même phénomène, mais déplacé vers les hautes fréquences. Ce résultat montre l'influence de la fréquence de coupure fc>0 de l'AO, en boucle ouverte, sur
le montage de PAO en boucle fermée par rétroaction négative.
290
8. Amplificateur opérationnel : montages de base
Ue(y)
us m
0,07--
Ue (V)
W(v)
0,07--
4,15
\
\
\U
u
0,79
W—A—
66 ILS
/
\
\
/
r = 66 [XS
/
\
4
\
\
/
v. ^
^
b)
a)
FIG. 8.39.
Une expression réaliste de la fonction de transfert de l'AO en boucle fennée, encore de type filtre
passe-bas, est la suivante :
Z(f) =
m
1 +jf/fc,,
où fCjr et r(0) représentent respectivement, la fréquence de coupure et le facteur d'amplification stationnaire du montage en boucle fermée ; ces quantités dépendent des paramètres de F AO et des éléments
de rétroaction. Par exemple, les mesures ont donné :
pour AO LM741
T{0) = 100
pour AO type OPA 2604
et
r(0) =100
/Cjr = 15 kHz
et fc<r = 200 kHz
Remarque : Dans le tracé expérimental des diagrammes de Bode, la courbe de phase est essentielle
pour s'assurer que le système étudié n'est pas un déphaseur pur, lequel est de la forme :
Pour le(luel
Idif) = |
■a
o
c
û
CM
1—1
O
("Ni
©
l
a) Limitation en fréquence du montage suiveur
Sur la figure 8.40a, on a représenté un montage suiveur dans lequel PAO a pour fonction de transfert, en boucle ouverte :
Di
CL
O
u
\Li(f)\ =
^ ^ rrfe:
À l'aide du schéma équivalent de la figure 8.40b, l'application des lois sur les tensions permet d'écrire :
i =
ue — Lis
Rr-
— Ae
Re + Rc
=
avec
e = u+ — «_ = ue — iis
d'où:
Ue ~ A {lie ~~ Us)
Re + Rs
l{e ~ us
R.
et
ARe + Rs
Us = ———
—Ur.
( 1 + 4) + Rs
Amplificateur opérationnel : montages de base
291
*
"I
I
i ç
W
l
Ae i
Us
I
j
Rs
R, m\
u,.
7777
7777
Re
c
Rs
h-
Us
lle
Ae
7777
7777
7777
7777"
a)
b)
Fig. 8.40.
Comme Re
Rs par conception de l'AO, la relation précédente se simplifie selon :
—
Us=—"e
.1 s
dou
T(s\
—
Tif) = - = —
Ainsi, en remplaçant A par son expression fonction de la fréquence, on trouve ;
mtr\
T\j) =
ce qui s écrit aussi.
1 -Mo -\-jf/fc,o
rrrr\ =
T{f)
^(0)
1 +jflfc,r
avec :
HO) =
A(i
. ~ 1
1 + Aq
1
et fCjr =fc,o (1 + Ao)
soit
fC;r œfc^Ao
si
Ao > 1
Notons que le produit du facteur d'amplification stationnaire par la bande passante à —3 dB se conserve
entre l'AO en boucle ouverte et l'AO en boucle fermée :
m xfc,r = Ao x fCj0
avec
7(0) « 1
On en déduit la nouvelle fréquence de coupure à —3 dB , selon :
fc,r ^ Aq fc^
b) Limitation en fréquence du montage amplificateur inverseur
Considérons le montage amplificateur inverseur avec l'AO réel (Fig. 8.41). En supposant l'AO
idéal, on avait établi l'expression suivante du facteur d'amplification :
. _ Us _ Rl
Ai —
— ——
Up
R
Appliquons le théorème de Millman successivement aux points 5* et E de ce montage, dans lequel
l'AO est réel :
i) au point S
Ae/Rs-e/Ri
lh=
f AR^ - Rs\
£
i/^ + i/M (ATAj"-6
pmsque
ii) au point E, en négligeant le courant de polarisation sur l'entrée inverseuse de l'AO :
_ ue/R\ + us/i?2
1/E, + I/E2
292
8. Amplificateur opérationnel : montages de base
x:
R
H
1—
Ae
1+
777/
7777
7777
FIG. 8.41.
7777
On en déduit le facteur d'amplification :
AR2
(1 A- A)
Ro
soit ;
7-(0)
!(/■) =
i +if/fc.
avec
r(0) = -
AoRi
R\(1 + AQ) + i?2
-TT
et
Aofc^O
fc,r
i+Ri/Rx ~ i + ino)!
Remarque : Pour R] = R2 = R, avec R de l'ordre de quelques kfi compatible avec la non-saturation
en courant, on obtient un facteur d'amplification stationnaire r{0) = — 1 et une fréquence
de coupure fc^ = {Ao/c,(,)/2. Ce montage se comporterait donc comme un montage
suiveur inverseur, avec une bande passante à — 3 dB deux fois plus faible que celle relative
au montage suiveur.
V. 2. — Vitesse maximale de balayage
a) Mise en évidence
Appliquons à l'entrée d'un montage amplificateur non inverseur, pour lequel Au = 10, un signal
de forme carrée, d'amplitude fixée.
Si on augmente la fréquence du signal d'entrée, on constate, à partir d'une certaine valeur, que
le signal de sortie se déforme pour prendre une forme trapézoïdale avec des pentes finies, environ
20 V • |jls_1 pour un AO TL081 et 0,5 V - (xs-1 pour un AO LM741 (Fig. 8.42).
Ainsi, en valeur absolue, la pente d ufi d t du signal de sortie, qui représente la vitesse de variation
du signal us{t), est limitée par une valeur vm finie :
max
d ir.
dr
A Vr.
Cette vitesse vm est appelée la vitesse maximale de balayage. Comme les droites de montée ou de
descente du signal ne sont plus verticales, on dit de façon imagée qu'elles ont subi un pivotement autour
du point de variation de la tension, d'où le nom anglais slew rate qui signifie vitesse de pivotement.
Pour un signal sinusoïdal de fréquence fi (Fig. 8.43), ue = ue,m cos(27r/r), la réponse d'un
montage de fonction de transfert Tif) a pour expression :
«sW = \T{fi)\Ue,m COS {ItTfiî + fif)
Amplificateur opérationnel : montages de base
Aus(V)
Ue (V)
293
Us (Y)
f^(V)
r- 10
1-
-1
10
l
FlG. 8.42.
FlG. 8.43.
dans laquelle |ZK) | est le module de la fonction de transfert de F AO en boucle fermée, à la fréquence
fi, et (f)s l'argument de T(fj). La non-saturation en vitesse implique :
2^1 Ue,m \Z(fi)\ < Vm
d'où la contrainte à respecter sur l'amplitude du signal d'entrée :
Vm
m <
"'•
2^. m)
Cette condition s'ajoute évidemment à celle de non-saturation en amplitude ue^m < Usaî/\Tifi)\.
Remarques : 1) En régime sinusoïdal, la saturation en vitesse se traduit par une déformation du signal
qui prend une forme triangulaire, d'où le qualificatif de îriangularisation donné au phénomène.
2) La vitesse de montée d'un AO est un paramètre très important. En effet, dans le montage suiveur, la bande passante à —3 dB , définie par fCjr = Ao/cv,, peut s'avérer difficilement exploitable sur sa totalité : la non-saturation en vitesse impose une amplitude uejm
inférieure à 53 mV pour un LM 741, 200 mV pour un OPA 2604 et 1,3V pour le THS
4062. Ainsi, comme dans le cas du 741, une faible amplitude, et par conséquent un faible
rapport signal sur bruit (cf. chapitre 17), impliquent souvent une difficulté dans la détermination de la fréquence de coupure .
b) Durée de montée d'un AO
Sur la base de l'étude précédente, les constructeurs introduisent une autre caractéristique dynamique de l'AO en boucle ouverte, la durée de montée tm d'un signal. On appelle ainsi la durée mise
par le signal de sortie pour passer de 10% à 90% de sa valeur maximale, lorsque le signal à l'entrée de PAO est un échelon de tension ue = EY{t) (Fig. 8.44).
Rappelons l'équation différentielle à laquelle satisfait la tension de sortie de PAO en boucle ouverte, lorsque la tension différentielle entre ses deux entrées est E :
d ii%
Te—
h Us = AqE
dt
294
8. Amplificateur opérationnel : montages de base
Us(t)
AqE0,9 AQE
ue(t)
II
E
0,1 AoE
tl
Te
é
t2
a)
FlG. 8.44.
Sa résolution est bien connue (cf. chapitre 4) :
/
\
t \
= AQE
Tc)
r
1 - exp
(
V
tw
r
c/.
puisque m, = 0 à l'instant initial. En inversant l'expression, on obtient ;
t = -tc In
1 -
us(t)
A^E
On vérifie évidemment que, pour t suffisamment grand devant tc , on a :
iis ze. Aç)E < Usat
Désignons par t\ et tj les instants en lesquels le signal atteint respectivement 10% et 90% de sa
valeur maximale. On déduit de ce qui précède :
tm = h-t[ = Tc <(-In
- In
[
l
.
Ain
AQE
(r i )
}
AoE . J
[
avec %(ri) = 0,10 AqE et ufitfi) = 0,90AqE. Il en résulte la relation suivante entre la durée de
montée et la fréquence de coupure du montage :
îm — ^2
t\ — Tc In
(MA
0,lj
In 9
27r/c
soit
ty,
0,35
fc
Remarque : 11 existe aussi des imperfections de FAO en régime stationnaire. Citons les intensités des
courants aux entrées + et — , notées respectivement */+ et b?,- » qui assurent la polarisation des transistors de l'étage différentiel d'entrée. Notons également la présence
d'une tension de décalage u0f (offset) des jonctions des transistors. Négligées dans le
modèle idéal de FAO, ces imperfections peuvent s'avérer néfastes sur la fonction réalisée en boucle fermée (cf. chapitres 9 et 17).
Amplificateur opérationnel : montages de base
295
CONCLUSION
Retenons les points essentiels.
1) L'AO est un amplificateur différentiel qui fournit une tension de sortie iis lorsqu'on applique
entre ces deux entrées la tension e. C'est un composant actif, que l'on polarise par des sources de
tension stationnaires en général symétriques Ua et —Ua . Par une rétroaction de tout ou partie de la
tension de sortie sur l'une des deux entrées différentielles, non inverseuse (+), et inverseuse (—), il
fonctionne soit en régime saturé soit en régime linéaire.
2) En régime saturé, la tension de sortie us ne peut prendre que deux valeurs discrètes us{t) = Usat
ou us{t) = —USat • Un tel système est largement utilisé comme comparateur, notamment en électronique
numérique.
3) En régime linéaire et en boucle ouverte, PAO se comporte comme un filtre passe-bas de fonction
de transfert :
A0
A(f)
= ^=
,
K>l
e
1 +iflfc
dans laquelle Aq est le gain stationnaire de l'ordre de 105 et fc la fréquence de coupure de l'ordre de
10 Hz.
4) En première approximation, on décrit bien PAO en admettant qu'il est idéal, c'est-à-dire que
son gain Aq est infini, sa résistance infinie, sa résistance de sortie nulle. Il en résulte que e ainsi que
les courants d'entrée sont nuls en régime linéaire.
5) Avec une rétroaction négative, on réalise des montages dont le facteur d'amplification Au est
plus faible mais totalement maîtrisé par l'environnement de PAO. En outre, la nouvelle fréquence de
coupure fCj est beaucoup plus grande. Les montages amplificateur non inverseur et amplificateur inverseur permettent de réaliser un gain stationnaire respectivement positif ou négatif, déterminé par le
quotient de deux résistances.
6) Le montage suiveur est utilisé comme adaptateur d'impédance, notamment dans le but de
connecté entre eux divers systèmes sans que la connection ne modifie les caractéristiques de chacun
d'entre eux.
7) Avec un ou plusieurs AO, on peut réaliser des systèmes fonctionnels très divers, permettant
par exemple de dériver un signal, de l'intégrer, et même de réaliser des composants présentant une
inductance en l'absence de bobinage ou une résistance négative.
EXERCICES ET PROBLEMES
P8-1. Fonction de transfert d'un AO en boucle ouverte
Un fabricant d'AO annonce un gain stationnaire en tension égal à 120 dB et une constante de
temps, rc = 5,3 ras. La fonction de transfert en boucle ouverte de PAO est de la forme :
1. Calculer Aq . Exprimer le facteur d'amplification en V • mV"^1.
2. Déterminer la fréquence de coupure fc de cet AO. Pourquoi la qualifie-t-on de fréquence de
coupure à — 3 dB ?
296
8. Amplificateur opérationnel : montages de base
3. À partir de quelle fréquence, dit-on que cet AO se comporte en atténuateur, et pourquoi ?
4. Calculer la valeur du module et de l'argument de A(f) pour les fréquences /] = 3 Hz et
/2 = 300 Hz .
P8- 2. Pertes par adaptation d'impédance
On estime à 6 dB les pertes dans une prise reliant un ampli-audio à un haut-parleur d'impédance
8 O. On souhaite envoyer une tension us d'amplitude 2 V à l'entrée du haut-parleur.
1. Trouver l'amplitude du signal i{e nécessaire en amont de la prise.
2. Déterminer l'impédance de sortie réelle de l'ampli-audio.
3. Comment peut-on diminuer ces pertes ?
P8- 3. Stabilité d'un montage à rétroaction à base d'AO
La figure 8.45 représente un amplificateur non inverseur dans lequel l'AO utilisé est polarisé par
deux sources de tension symétriques de f.e.m ±15 V . Le fabricant indique la valeur de la vitesse maximale de balayage vm = 0,5 V ■ jxs-1 , ainsi que l'intensité du courant de saturation iS;max = ±20 m A .
1. Donner les conditions auxquelles doivent satisfaire les résistances R\ et Rj , pour que, d'une
part l'amplification en tension soit de 40 dB, d'autre part il y ait saturation en tension avant toute
saturation en courant.
2. L'équation différentielle caractéristique de l'AO réel s'écrit, avec les notations habituelles :
diiç
dt
A- us — Aoe
où rc = 1,6 ms est la constante de temps de l'AO et Aq = 104 le facteur d'amplification stationnaire.
a) Montrer que le montage est stable seulement si le nœud intermédiaire du pont de résistances est
relié à l'entrée inverseuse.
b) Estimer la durée de basculement entre les deux états de fonctionnement non linéaire.
Ri
A
777/
R2
7777"
7777
Fro. 8.45
>
/?i
V
BX
FIG. 8.46.
P8- 4. Impédances d'entrée et de sortie dans le montage suiveur de tension
1. Pourquoi le montage suiveur de tension est-il si apprécié en électronique ?
2. Établir l'expression des impédances d'entrée et de sortie du montage suiveur de tension sachant
que l'AO est réel, avec son impédance d'entrée Re et son impédance de sortie Rs.
3. Ce résultat reste-t-il conforme au résultat obtenu avec l'AO idéal ? Justifier.
Amplificateur opérationnel : montages de base
PS- 5. Utilisation d'un mauvais voltmètre
297
web
Dans le montage de la figure 8.46, dans lequel R2 = 80 kfl, /?, = 20 kfl et E = 9 V , on souhaite
mesurer la tension UAb entre les points A et B.
1. Établir l'expression de Uab ■
2. On effectue la mesure en utilisant un voltmètre, que l'on positionne entre les points A et B,
en fermant l'interrupteur K. Le constructeur spécifie que la résistance interne du voltmètre vaut
10 kD V-1. Indiquer la mesure affichée par le voltmètre sur le calibre 2 V. Expliquer le résultat
obtenu.
3. Proposer un montage à base d'AO permettant d'utiliser ce mauvais voltmètre.
P8- 6. Voltmètre multicalibre
On ne dispose que d'un voltmètre dans le seul calibre 2 V, car le bouton de changement de calibre
est inutilisable. On souhaite mesurer avec précision des tensions plus faibles.
Montrer que le montage de la figure 8.47 permet d'obtenir un voltmètre multicalibre. Préciser la
valeur du calibre selon la connexion de l'entrée inverseuse aux nœuds S, A et B.
77
FIG. 8.47.
FIG. 8.48.
P8- 7. Montage amplificateur non inverseur
1. Donner l'expression du facteur d'amplification stationnaire AH du montage de la figure 8.48.
2. On donne la valeur des résistances R\ = 100 kfl, R2 = Ri = Ri = i kfl, ainsi que les tensions
de saturation de l'AO, Usat = ±10 V . Trouver la valeur de A;( et déterminer la valeur maximale de E
qui évite la saturation en tension du montage.
P8- 8. Gyrateur à amplificateur opérationnel
Un gyrateur est un quadripôle actif caractérisé par les relations suivantes entre les tensions et les
intensités des courants à l'entrée et à la sortie :
A et 7 étant deux nombres positifs (Fig. 8.49a).
1. a) Sachant que A est un facteur numérique, trouver la dimension physique de Y.
b) Écrire la matrice de transfert du système.
298
8. Amplificateur opérationnel : montages de base
c) Établir la relation entre l'impédance d'entrée du gyrateur et son impédance de sortie.
2. On connecte en sortie un condensateur de capacité C et, en entrée, on branche un générateur
qui maintient une tension sinusoïdale de pulsation co entre les bornes d'entrée.
a) Trouver l'expression de l'impédance d'entrée. Justifier alors le nom de gyrateur et conclure sur
l'utilité d'un gyrateur.
b) Application numérique pour C = 0,1 fxF et 7 = 1 /2000 S .
3. Dans le montage de la figure 8.49b, l'AO est idéal et la sortie débite dans une charge de résistance
Rc . Calculer l'impédance d'entrée du gyrateur en fonction de Rc, Z| et Z2. Conclure pour Z| = Z2
et Rr = 0,2 kfï.
le
ls
1
Z,
k
Ue
'
U,
777/
7777
7777
a)
b)
Fig. 8.49.
P8- 9. Réalisation d'une inductance en parallèle avec une résistance
On se propose de réaliser avec un AO un composant se comportant comme une bobine purement
inductive (Fig. 8.50).
1. Montrer que l'impédance d'entrée du circuit est équivalente à une inductance en parallèle avec
une résistance. Calculer les valeurs de l'inductance et de la résistance pour R\ = 10 kfî, Rj = 10 kfi
et C = 1 nF.
2. Comment modifier le circuit pour que le composant soit équivalent à un dipôle RLC parallèle.
Ri
«H
7777
Fig. 8.50.
7777
P8-10. Convertisseur tension-courant
Dans le montage représenté sur la figure 8.51a, l'amplificateur opérationnel est idéal et fonctionne
en régime linéaire.
1. Établir l'expression du courant ic circulant dans la charge en fonction de la tension d'entrée
ue et de R] . Comment améliorer l'architecture du système afin qu'il assure la fonction de conversion
tension-courant ?
Amplificateur opérationnel : montages de base
299
2. On réalise le montage de Howland représenté sur la figure 8.51b. Établir l'expression de ic.
3. La structure de la figure 8.51c peut-elle rendre ic insensible à un bruit sur la masse, c'est-à-dire
à une fluctuation de faible amplitude de la tension de référence ?
Ri
oo
ue
7777
Ur
7777
Ri
7777 7777
a)
_
_
D>
^ GO
UeA
Us
Us
7777
R\
7777
i
Ue,2
Zc
7777
-
7777
*7
,
Uc
Ur
A
7777
7777
7777
c)
Fig. 8.51.
P8-11. Convertisseur d'impédance de Riordan
Le montage de la figure 8.52 représente le convertisseur d'impédance de Riordan.
1. Établir l'expression de la tension de sortie iis en fonction du courant d'entrée ie.
2. On choisit Z] = Z2 = Z3 = i? , Zc = r et Z4 est l'impédance d'un condensateur de capacité
C. Montrer que l'impédance d'entrée de ce montage, entre le point E et la masse, est équivalente à une
bobine dont on précisera l'inductance.
Z,
Z3
GO
Ug
Z2
Z4
FIG. 8.52.
300
8. Amplificateur opérationnel : montages de base
P8-12. Filtre passif suivi d'un AO
Un filtre passif est constitué d'une bobine (inductance L = 10 mH), d'un résistor (résistance
/? = 5 fi) et d'un condensateur (capacité C = 1 |jlF) en série (Fig. 8.53). La tension d'entrée est une
tension sinusoïdale, d'amplitude efficace Ue = l V et de pulsation co . La tension de sortie est celle
aux bornes de l'ensemble RC .
Ri
/?.
ue
-L _
R
t>^
+
r
7777
c:
Rr
ï
7777"
Fig. 8.53.
7777
1. a) À l'aide d'un raisonnement qualitatif, trouver la valeur de la fonction de transfert Hijco),
entre la tension d'entrée et la tension de sortie, d'un tel système utilisé comme filtre, aux fréquences
extrêmes (très faibles ou très grandes). Commenter.
b) On introduit û>o = (LC)_1//2 , Te = L/R Qi Q = &>o Te . Calculer ces grandeurs en précisant
leurs unités SI.
c) Établir l'expression de la fonction de transfert Hijco). En déduire Hix) — H{jto), en introduisant Q, sachant que x est la fréquence réduite x =///o ■
d) Tracer l'allure du diagramme de Bode relatif au gain, en fonction de X = 1g a:. Calculer la
valeur du gain en tension Gu , successivement pour X = —oo, X = 0 etX = oc. Commenter.
2. En sortie, on connecte une charge Rc = 80, par l'intermédiaire d'un amplificateur opérationnel
idéal dont la rétroaction est constituée par les résistances /?i = 1 kO et #2 = 10 kO. On suppose que
l'AO n'est pas saturé en courant.
a) Justifier sommairement l'intérêt de l'AO en précisant ses fonctions.
b) Calculer la puissance dissipée dans la charge, pour x = 2.
P8- 13. Réponse d'un comparateur inverseur à hystérésis à un signal triangulaire
La figure 8.54 représente un comparateur inverseur à hystérésis, les résistances R[ et R2 valent
respectivement 1 kO et 2,5 kO ; en outre Usat = 14 V.
X
7777
Ri
7777"
Fig. 8.54.
Amplificateur opérationnel : montages de base
301
1. À quelle condition doit satisfaire la tension d'entrée ue pour que la tension de sortie us soit
égale à Usat ? Même question pour que us vaille — Usnt. En déduire le diagramme donnant us en
fonction de ue. On trace le graphe iis en fonction de ue en adoptant l'échelle suivante : 1 cm représente 10 V.
2. On applique à l'entrée du comparateur une tension triangulaire symétrique qui varie entre les
valeurs —8 V et 8 V pendant une durée totale de 4 ms . Représenter graphiquement les tensions ue(t)
et us{t) sachant que sur l'axe des abscisses 1 cm représente 0,5 ms.
P8-14. Utilisation de l'AO OP - 470
On a extrait de la documentation constructeur de l'AO OP — 470 les données suivantes :
i) la courbe de gain en fonction de la fréquence en boucle ouverte (Fig. 8.55a),
ii) la courbe de gain en fonction de la fréquence en boucle fermée (Fig. 8.55b),
iii) la courbe du facteur d'amplification stationnaire en boucle ouverte en fonction de la tension
d'alimentation (Fig. 8.55c).
(dB)
40
Ua — 15 V
120
Boucle ouverte
Facteur d'amplification
Gu (dB)
5 x 10°Boucle ouverte
Boucle ouverte
IOO-80--
40
60--
20 -
40--
/ (kHz)
20-Hz
lO'-1Ua ( V)
1 kHz
a)
MHz
20^-
I
10
I
100
I
1000
b)
I
10000
15
20
c)
FIG. 8.55.
1. Commenter en le justifiant le tracé de la figure 8.55a.
2. Calculer le gain stationnaire Gu en dB pour Ua = 10 V . Même question pour Ua = 15 V .
3. Quelle est la fréquence de coupure /Cj0 de l'AO en boucle ouverte lorsque Un = ISW 7
4. Comment réaliser avec cet AO un filtre passe-bas de fréquence de coupure fc = 20 kHz ?
Donner l'expression de la fonction de transfert T(f) du filtre obtenu.
5. Sachant que la vitesse maximale de balayage est vm = 2 W • jxs-1 et que les tensions de saturation sont Usa{ = 12 V et —
= —12 V , déterminer l'amplitude maximale d'un signal sinusoïdal à
l'entrée du filtre, de fréquence 20 kHz , qui évite la saturation en amplitude et en vitesse.
Amplificateur opérationnel :
compléments
Nombreux sont les systèmes électroniques où l'amplificateur opérationnel est utilisé comme un
composant élémentaire : filtres actifs, oscillateurs, convertisseurs analogique-numérique, etc. Nous proposons dans ces compléments d'apporter des précisions sur des systèmes spécifiques, tels que 1"amplificateur à fort gain, l'amplificateur d'instrumentation, l'amplificateur logarithmique compensé en température. On analyse évidemment l'influence des imperfections de l'AO sur les différents montages,
notamment l'intégrateur.
I. — AMPLIFICATEUR À TRÈS FORT GAIN
Les amplificateurs opérationnels étant des systèmes actifs qui sont alimentés par deux sources
de tension symétriques, il convient avant tout de montrer comment l'on réalise une telle alimentation à
partir d'une seule source de tension stationnaire. Le caractère différentiel de 1" AO nous impose d'utiliser
un système de polarisation avec deux tensions stationnaires symétriques Ua et —Ua avec un point
milieu à la masse.
1,1. — Alimentation stationnaire symétrique
On peut réaliser une telle source de tension stationnaire bipolaire, à l'aide d'une source de tension
stationnaire de f.e.m E comme le montre la figure 9.1.
T
R
+
[>oo
R
Ejl
1
Fig. 9.1.
Le premier étage réalise une division par deux de la tension d'entrée
= 30 V ; cependant, si on
se limitait uniquement à cela, la connexion des deux résistances /? = 10 kfi respectivement en parallèle
avec les deux résistances de charge différentes /?cj et Rcp_, romprait cette symétrie.
Amplificateur opérationnel : compléments
303
En ajoutant un amplificateur suiveur de tension (cf. chapitre 8), on sépare les fonctions du premier
étage de celles des étages qui suivent. On augmente le courant débité par le système, en connectant, à la
sortie de l'AO, un montage push-pull constitué de deux transistors (cf. chapitre 7).
En choisissant le point milieu M comme nouveau potentiel de référence, on obtient l'alimentation
symétrique EjT. et —E(1 recherchée, capable de s'accomoder de résistances de charges R( \ et R(p
différentes.
1.2. — Connexion en cascade de montages à rétroaction négative
Les montages avec AO étudiés jusqu'à maintenant n'avaient pas de très grand gain, puisque le
facteur d'amplification restait inférieur à 1000, cela en raison des valeurs des résistances compatibles
avec les hypothèses AO idéal et courants faibles. Une première solution, immédiate bien qu'onéreuse,
consiste évidemment à connecter en cascade deux montages amplificateurs.
Considérons donc deux montages amplificateurs non inverseurs connectés en cascade (Fig. 9.2), de
facteurs d'amplification en tension respectifs AUi\ et AUj2 ; Ze,\ et Ze,2 sont leurs impédances d'entrée,
Zs, i et ZS)2 leurs impédances de sortie.
Lorsque l'interrupteur K est ouvert, c'est-à-dire, lorsque les deux montages sont déconnectés, on
a les relations suivantes (cf. chapitre 8) :
Rç,l — Au^\Ue — ( 1 -|-
^
\^
K
GO
+
Wf,2
7777"
a)
M.
7777
7777
Ri
Ra
Ri
.77
z.1
Zv,2
K
A
AuAUe
eA
b)
Ue,2
Ze2
Aii 2 II e.l
T
Fig. 9.2.
Lorsqu'on ferme K, ce qui connecte les deux systèmes entre eux, la tension d'entrée ue2 du
second diffère alors de la tension de sortie iis^ du premier, en raison de l'impédance d'entrée Ze^ ■
Apparaît en effet une division de tension :
_
2^2
lif? 7 — ry
| ry lie 11
2^,2 + ZS! i
Il en résulte que :
Ur =
A?,2
Ze.2 + Zc 1
AUtxAU:2Ue
d'où
^,2
Al. = — =
A,h]AUj2
ue
Ze.2+ZsA
304
9. Amplificateur opérationnel : compléments
On voit que le facteur d'amplification de l'ensemble se réduit au produit des facteurs d'amplification
des deux systèmes en cascade pourvu que Zep
Zs y . Lorsque cette dernière condition est réalisée, il
y a adaptation d'impédance pour la tension. Retenons :
Au ^ Au^Aup
si
Zep ^ Z5)]
1.3. — Montage avec plusieurs cellules en rétroaction négative
La figure 9.3 représente un montage amplificateur avec un seul AO et des résistances dans la gamme
du kO . La rétroaction est ici constituée de deux cellules passives en cascade.
7777
A A
7777"
IU
Ri
7777
7777
Fie. 9.3.
Montrons qu'un tel arrangement des résistances autour de l'AO permet d'obtenir un fort gain, au
prix évidemment d'une fréquence de coupure plus basse. Pour cela, appliquons le théorème de Millman
aux nœuds A et 5 du montage. Il vient, en introduisant les conductances G| , Gi, Gt, et G4 , l'AO
étant idéal ;
UgG^ + usG]
G3
Ua =
ub — U- — ue et ub =
G3 + G? + G]
G a + G3
Il vient, en éliminant ub entre ces deux expressions :
«5 _ G4(G3 + G2 + G|
Ue
^3(^2 + Gi)
O3G,
ce qui s'écrit aussi :
us
G4
G2
G4
G2
G4
— = 1+ — + — + — + —x —
iie
Gi
G\
G3
G,
G3
Finalement, le facteur d'amplification en tension Au a pour expression, en fonction des résistances :
R\
Ri
R3
R\
R3
A;( = l + — + — + — H
x —R4
/?2
R4
Ri
R4
Notons que l'ensemble des deux premiers termes représente le facteur d'amplification du montage non
inverseur classique dans lequel on aurait supprimé les résistances Rj et R3 en faisant Ri ~ oc- et
R3 =0 (cf. chapitre 8).
Ordre de grandeur : pour deux cellules identiques en cascade, telles que R| = R3 = 10 kfl et
= ^4 = 1 kfi, on obtient :
, +
ê
= 11
et
= 1 + 10+10+10+(10 x 10) = 131
Expérimentalement, avec de tels systèmes, on a trouvé Ai( « 6,532/0,046 ~ 142 (Fig. 9.4).
En choisissant R\ — R3 = 100 kil et ^2 = ^4 = 1
, le facteur d'amplification serait d'environ
10000, ce que l'on ne saurait réaliser avec un amplificateur non inverseur classique, en raison des
contraintes qu'imposerait une résistance R\ = 10 MO. L'efficacité de la multiplication des cellules
réside dans l'affaiblissement de la rétroaction sur l'entrée inverseuse de l'AO.
Amplificateur opérationnel : compléments
305
MV)
" «.(V)
4,5 ms
6,532
0,046
FlG. 9.4.
II. _ AMPLIFICATEUR D'INSTRUMENTATION
Certaines techniques, telles que la suppression du bruit d'un détecteur ou du courant d'obscurité
pour un CCD, conduisent à effectuer la différence entre deux signaux très faibles ; il est alors nécessaire de disposer d'une impédance de charge très grande, afin de recueillir une tension suffisante en
sortie. Comme ceci n'est pas réalisable avec un montage soustracteur classique (cf. chapitre 8), on utilise un système particulier appelé amplificateur d'instrumentation. Ce dernier est constitué d'un premier étage, bâti selon une structure symétrique, avec deux AO non inverseurs, qui garantissent une impédance d'entrée infinie sur chaque entrée, et un second étage soustracteur (Fig. 9.5). Ces deux étages
sont intégrés dans un boîtier et les bornes de connexion de la résistance R variable sont accessibles à
l'utilisateur.
r3
UcA
7777
UsA
H
n
GO
1
R4
7777
*5
Rl
7777
7777
Soustracteur
Us,2
Ue.2
7777
7777
Fig. 9.5.
Supposons que deux capteurs fournissent les tensions ue^ et ue^2 et que l'on cherche à amplifier
leur différence : iiCj\ et uc^2 sont les tensions associées aux signaux utiles des capteurs, tandis que
la tension umc représente le signal de mode commun associé à une tension additive que l'on souhaite
supprimer :
UpA — Mme "F tlca
et
Ue 2 — tlmc + Uc 2
306
9. Amplificateur opérationnel : compléments
Le premier étage d'un amplificateur d'instrumentation se distingue d'un montage amplificateur ou
d'un montage soustracteur par les deux propriétés suivantes :
i) un signal est appliqué sur chacune des deux entrées d'un AO d'instrumentation,
ii) le signal utile est amplifié sans que le mode commun le soit, ce qui permet d'éviter une saturation
en tension à la sortie du premier étage.
On a, dans ces conditions, en appliquant le théorème de Millman aux entrées inverseuses des deux
premiers AO, de tensions respectives ue_i et «^2 :
Ils, | //?1 ~f" Ue 2/R
Ue 1
' ~
1/7?, + 1//?
^
Us,2 /^2 + lie, 1 /R
e
"e'2
et
u
_
1 /7?2 + 1 /R
d'où l'on tire, respectivement :
«.,1 = (^1 + ^ «.,1 -
j «.,2
s,2=
Il vient, en fonction de la différence des signaux utiles iiCi2 ~ mc,i
Us,] = Un,c + UC)2 - ^1 +
(Uc.2 " "c,l )
et
+
:
USj2 = Umc +
+ ^1 +
(llcp " «c.l)
Si les résistances satisfont à la relation R^R^ = R4R6, le second étage fournit en sortie la tension
suivante (cf. chapitre 8) :
Re 1
\
Us = — («s,2 " «5,l)
SOlt
^
iis = — n-\
N
I {uCi2 - lie, 1 )
qui est une tension proportionnelle à la différence des tensions des deux signaux utiles, sans le signal
parasite de mode commun et donc sans le risque de saturation.
Exemple : dans un bolomètre infra-rouge, constitué d'un pont de Wheatstone (cf. chapitre 2), on
cherche à amplifier la différence entre la tension du signal électrique associé à un pixel exposé à un
flux thermique et celle donnée par un pixel recevant le flux thermique de l'environnement. Or, l'ordre
de grandeur des tensions mesurées est de 1 V et leur différence de 1 mV. L'amplificateur d'instrumentation permet de connecter la sortie de chaque pixel à une même charge infinie, ce qu'un montage
soustracteur ne pourrait réaliser.
En outre, en choisissant dans le montage précédent R[ = R2 = R5 = /?6 — 100 kO , R = 50 kfî
et i?3 = 7?4 = 100 kilt, on supprime le signal associé à l'environnement, ce qui permet d'amplifier, sans
risque de saturation, la différence de signal utile d'un facteur de l'ordre de plusieurs centaines.
III. — MONTAGES A RETROACTION NEGATIVE AVEC DIODES
III. 1. — Modification des niveaux de sortie d'un comparateur
Certains AO sont polarisés par des tensions stationnaires non symétriques, unipolaires, 0 et
Ua > 0 ,cq qui implique un point milieu, de tension f/fl/2 ; cette tension est équivalente à une composante stationnaire qui risquerait d'être supprimée par tout filtre passe-haut dans le montage.
Amplificateur opérationnel : compléments
307
Pour conserver une polarisation bipolaire symétrique
et transformer le signal de sortie bipolaire en signal unipolaire compatible avec les niveaux de tension des circuits logiques, on ajoute au
montage comparateur classique (cf. chapitre 8) une diode Zener, dont la tension caractéristique Uz
est compatible avec le niveau 1 des circuits logiques (Fig. 9.6). Dans l'exemple considéré, on choisit f/z = 3,3 V .
En l'absence de diode Zener, on sait que :
i) si £ > 0 soit ue < 0. alors iis = Umt avec | Usat \ < |f/«|,
ii) si e < 0 soit iie > 0 alors us = —Usa,.
Uz = 5V
oc
777Z
7777
Fig. 9.6.
Lorsque l'intensité ie = ue/R du courant est positive, c'est-à-dire que we > 0, la diode Zener,
placée entre l'entrée inverseuse E de PAO et sa sortie S, est passante. La chute de tension Uj aux
bornes de la diode passante implique :
Ues = Vd
avec
f/,/ = 0,6 V
L'AO est donc en rétroaction négative et fonctionne en régime linéaire. On en déduit :
ii- = M_i_ = 0
d'où
Ues = Ud = —us
soit
us = —Ud = —0,6 V
si
ue> 0
En revanche, lorsque l'intensité ie est négative, c'est-à-dire ue < 0, la diode est bloquée : il en résulte,
par effet Zener (cf. chapitre 7), que :
Ues = —Uz = —us
soit
us = Uz = 3,3 Y
si
ue < 0
On en conclut que ce montage comparateur, auquel on a associé une diode Zener en rétroaction négative,
voit ses niveaux de tension de saturation Usat et — f/jaf, modifiés en Uz et —f/j, niveaux de tension
compatibles avec ceux des familles de circuits logiques TTL ou CMOS.
III. 2. — Montage logarithmique compensé en température
On sait que l'amplificateur logarithmique déjà présenté (cf. chapitre 8) était difficilement utilisable
en raison de la dépendance de ses caractéristiques avec la température T :
u
*=-
UTla
{ws
avec
Ut =
ksT
En effet Ut est proportionnel à T, alors que I,~ varie comme T3.
Dans ce nouveau montage, représenté sur la figure 9.7, les deux transistors bipolaires 7) et 7^
sont appariés : fabriqués dans un même substrat semiconducteur, les intensités de courant de saturation
sont identiques.
La rétroaction négative sur PAO, effectuée par le transistor Tj , impose une tension différentielle e
nulle, d'où il- = 0 . L'analyse du montage s'effectue en considérant successivement deux blocs.
308
9. Amplificateur opérationnel : compléments
_L_
Ri
7777
7777
^
y: Uhe
fi.
Ube,2
u
+
7777
Rx
R3
7777
7777
II.
7777
7777
FlG. 9.7.
i) La base et le collecteur du transistor T\ sont connectés à la masse : la jonction np collecteurbase est en court-circuit car l'AO impose une tension nulle sur le collecteur. Le transistor % est utilisé
comme une diode et l'intensité uelR\ du courant injecté dans le collecteur traverse la jonction pn,
base-émetteur. On a donc, en désignant par Uhe,\ la tension base-émetteur du transistor 7j et par îSi\
l'intensité de son courant de saturation :
M-ë
—
Ri
ttbe,[
ic,\ = L,i exp
UT
Jî v
d ou
rr i | L,1
ubeA = f/7-ln —
\ L, i
en inversant l'expression.
ii) Le transistor %_ fonctionne également comme une diode ; l'intensité du courant dans In jonction
base-émetteur est donc, avec des notations analogues aux précédentes :
Mbe,2
4,2 = 4,2 exp
E
~U+
R~,
Uf
d ou
4,2
iibe>2 = TT
r/7- 1In ( —
v 4,2
en inversant l'expression.
Les tensions ube>\ , ubep et ii+ sont reliées simplement par l'additivité des tensions :
4,24, i \
ll-\- — llhe,2 ~ Uhe I — f/j In ( 7
.
V 4,i 4,2/
Les transistors étant appariés, 4,1 = 4,2 , la relation précédente se simplifie donc selon :
u+ = f/jln ( ^ )
\ 4.1 /
soit
u+
car
E
\ RlUg
Comme l'amplificateur non inverseur de l'étage de sortie fonctionne en régime linéaire, on obtient
finalement :
u+ = II- =
R3
/?3 + ^4
Uc
d'où
u.
r3'
\erJ
Ainsi, on réalise la fonction logarithme en compensant la dérive en température du courant de saturation
4 - H persiste néanmoins une variation linéaire avec la température liée à Ut .
Remarque : L'utilisation de transistors à la place de diodes ne se justifie que sur le plan pratique, car
les transistors appariés disponibles sont bien souvent plus performants que les diodes.
Amplificateur opérationnel : compléments
309
III. 3. — Amplificateur redresseur de tension à simple alternance
a) Redresseur à simple alternance
Un redresseur simple alternance est un quadripôle qui impose, entre la tension d'entrée ue et la
tension de sortie us, la relation simple suivante :
uK = u.
si
u* >0
et
Ur =0
si
up < 0
Ces relations peuvent être condensées selon :
us[î) = - ue{t) + \ue{t) |
ce qui implique
us{t) ^ 0
Mise à part sa tension de seuil, la diode T) apparaît comme le composant le plus adapté à cette fonction ;
cependant ce défaut sur le seuil peut être corrigé par le montage avec AO de la figure 9.8.
~
V
W 1/
«y,0
Us
777/
7777 7777
FlG. 9.8.
Analysons ce redresseur simple alternance en distinguant deux cas :
i) La diode conduit
Comme l'AO est en régime linéaire, us = ue ; en outre, la diode étant passante, l'intensité is du
courant qui la traverse est positive. On a donc :
Ue = Us — Rfis >0
d'où
Us = Ue
pOUr
lle > 0
La tension seuil Uj de la diode, qui constituait un défaut de décalage pour un redressement sans AO,
se retrouve dans la tension amont us_o , puisque uSjo = us + Ud .
H} La diode est bloquée
L'AO est alors en boucle ouverte et fonctionne en comparateur à saturation. Le courant à l'entrée
inverseuse étant négligeable, la tension en sortie de la diode est nulle : % = 0 . La diode étant bloquée,
la tension de sortie usfi de l'AO est inférieure à us ; ce dernier est alors en régime de saturation,
d'où:
usp = —Usât
ce qui implique
6 < 0
et
ue <0
Testons expérimentalement cette analyse, en utilisant un AO LM 741 avec une charge Rc, laquelle détermine l'intensité du courant qui traverse la diode. Le résultat obtenu est meilleur pour
Rc = 1,5 kfi (Fig. 9.9a) que pour Rc infini lorsque l'intensité U du courant est nettement plus faible
(Fig. 9.9b).
310
9. Amplificateur opérationnel : compléments
Rc=h5 kQ.
K (V)
u
AO 741
5,5
5,5
/?f. infini
K (V)
s (V)
VV)
AO 741
5,5
5.5
u..
W
,
7'
/T = 0,2 ms't
^
7'
/T - 0,2 ms\
u
e\
-5,5
-5,5
-\r*:
-5,5
1
-5,5
-*■ t
a)
b)
FIG. 9.9.
b) Amélioration du montage
On constate qu'une légère distorsion du signal sur l'alternance positive persiste; cette distortion
n'apparaît pas si on utilise l'AO OPA 2604, connecté sur la même charge Rc = 1,5 kO (Fig. 9.10).
C'est ce que nous nous proposons d'analyser.
Rc= 1,5 kQ
AO 2604
" MV)
5,5
V)
5,5
u..
•*
7
/T = 0,2 ms\
-5,5
-5,5
t
Fig. 9.10.
Lorsque la tension d'entrée ue augmente depuis une valeur négative, pour laquelle us$ = —Usat,
elle prend une valeur nulle, puis légèrement supérieure à zéro ; la tension de sortie us_q bascule alors de
— USat vers la valeur positive de la tension d'entrée ue. Il en résulte une forte variation d'amplitude du
signal de sortie, en une durée très brève, alors que PAO présente une vitesse maximale de balayage vm
(cf. chapitre 8).
En comparant les vitesses maximales de balayage des deux amplificateurs utilisés, on constate que
celle de l'OPA 2604 est cinquante fois plus rapide que celle du LM741. Cette remarque permet de
justifier la différence des comportements observés .sur les figures précédentes.
On peut réduire l'influence de vm sur le signal de sortie, en modifiant le montage à l'aide d'une
seconde diode V connectée en inverse, comme sur la figure 9.11a, où uS)q = —Ud lorsque ue est
négatif. La transition en tension est alors plus faible lorsque ue change de signe. Cette distorsion que
l'on avait observée sur la figure 9.10, est supprimée, y compris en utilisant un AO 741 pour lequel vm
est assez faible, avec un signal d'entrée non sinusoïdal (Fig 9.11b).
Amplificateur opérationnel : compléments
311
Rc= 1,5 kl2
AO 741
(V)
5,5
,x
-,
>
V' A
V
>
5.5
o-r = o. 2 qis
Ws,0
7777 777/
«.(V)
-5,5
7777 7777
r
b)
a)
FIG. 9.11.
III. 4. — Détecteur crête
Transformer le montage précédent en détecteur crête, dont le rôle est de prélever la valeur maximale
de la tension de sortie, n'est pas envisageable en pratique. En effet, si on avait stocké la valeur crête
de la tension us à l'aide d'un condensateur placé comme une charge du circuit, on observerait une
décroissance de us lorsque la diode est bloquée. Ce phénomène, qui a tendance à s'accentuer pour les
valeurs de capacité de quelques nF, est lié à l'existence de courants aux entrées de F AO. Aussi, pour des
applications nécessitant un fort courant à la tension crête, privilégie-t-on le montage de la figure 9.12.
E
-
\>
7777
H/'
C2
7777
7777
7777
FIG. 9.12.
La présence de la diode Vi impose un seul sens de circulation du courant dans le condensateur de
capacité C. Après un régime transitoire, la tension aux bornes du condensateur, de capacité C, s'établit
comme suit, si iie{t) = ue,mcos(cot) :
lt+ — Me,m ~ Ud,\
La diode V2 doit être toujours passante, de façon à maintenir une rétroaction négative sur l'AO
ainsi qu'un régime linéaire, ce que permet la source stationnaire de f.e.m E. Il en résulte :
e=0
d'où
u+ = m_
avec
u+ = ue^m —
et
«_ = us — £7^,2
On en déduit :
Us = lie,m + Ud,l — UdA
SOit
Us = Ue,m
si les tensions aux bornes des diodes sont égales. Dans le cas contraire, un léger décalage persiste.
312
9. Amplificateur opérationnel : compléments
III. 5. — Redresseur à double alternance
a) Montage déduit du redresseur à simple alternance
Rappelons qu'un redresseur à double alternance est un quadripôle dont la tension de sortie iis^ est
reliée à celle d'entrée ue par l'équation :
~ \^e{t) |
Par rapport au redressement simple alternance, celui à double alternance d'une tension périodique provoque un doublement de sa fréquence et de la valeur de sa composante stationnaire.
On a vu qu'avec un pont de Graetz, on pouvait réaliser le redressement à double alternance d'un
signal sinusoïdal de 50 Hz (cf. chapitre 7). Pour des fréquences plus élevées, on utilise plutôt le montage
de la figure 9.13 réalisé à partir d'un redresseur à simple alternance et d'un amplificateur soustracteur.
X
V
r.s
î>2
7777
7777
2R
2R
Redresseur à
simple alternance
À.
Soustracteur
7777FlO. 9.13.
En effet, les deux signaux redressés, le simple alternance Mr,.r(r) et le double alternance Us,d{t),
s'écrivent respectivement, en fonction du signal ue{r) à redresser :
*v(/) = 2 WO + KWIl
d,0Ù
"mW = KWI =
2u
r,s{t) - Ue{t)
En multipliant urrS{t) par deux et en soustrayant le signal initial, on obtient bien avec un tel montage le
signal redressé double alternance.
b) Autre montage
Sur la figure 9.14, on a représenté un autre montage redresseur à double alternance. L'analyse s'effectue qualitativement en considérant successivement les quatre états de fonctionnement que définissent
les deux diodes V\ et V2 .
/j Hypothèse de conduction de Xô et XL
L'AOl est en régime linéaire en raison de sa rétroaction négative à travers V\ : 6 = 0. Comme
les deux diodes conduisent, on a ;
«4 > 11% et ug > ue
puisque le courant X traversant Xb est orienté de B vers E et que l'intensité du courant à l'entrée de
1'A02 est nulle. On en déduit, le fonctionnement idéal de 1'A02 impliquant ug = uf :
11 a > ue
et
ua > up
De ces inégalités, il en résulte, d'après la loi des nœuds, que la diode T)\ ne peut être passante. L'hypothèse de conduction des deux diodes doit donc être exclue.
Amplificateur opérationnel : compléments
R
E
313
V
oo
UA
AGI
A02
7777
7f77
7777
7777
UR
7777
FIG. 9-14.
ii) Hypothèse de blocage de V[ et V2
Si V\ et V2 ne conduisent pas, il n'y a pas de rétroaction sur F AOl. Ce dernier fonctionne donc
en régime de saturation avec uS)\ = ±Usa!. Or :
si
11 s 1 = U.ml
V-y
conduit
et
si
m,s-1 = —Usa,
"Ci
conduit
L'hypothèse du blocage des deux diodes doit donc être écartée.
iii) Hypothèse de la diode T>i passante et de la diode T>2 bloquée
On a, ici, *2 = 0 puisque XA ne conduit pas et qu'il n'y a pas de courant à l'entrée de rA02. En
outre :
Ua
i\ = 4 avec ie = — et i\ = ——
~R
puisque ue = 0 . Comme up = us =
= 0, on en déduit :
4 >0
ue > 0
d'où
uA = —ue < 0
L'A02> monté en amplificateur inverseur, donne alors, si iie > 0 :
ht g
hlg
À l'alternance positive, le signal de sortie recopie le signal d'entrée.
iv) Hypothèse de la diode Î>| bloquée et de la diode X4 passante
Dans ce cas, on a :
u
b
12 = — >0
R
et
iip = ub > 0
puisque «£: = 0 et qu'aucun courant ne pénètre dans l'AOX. L'application du théorème de Millman aux
nœuds E et F, entrées des AO, donne :
0
uelR
Ub/R "F Upf {2R)
l/i?+ l/i?+ 1/(2/?)
ue/R
3ug j {2R)
1//?+ 1//?+ 1/(2/?)
et
iip —
usl R
l/R + 1/(2/?)
On en déduit, si ue <0 :
3
ue — --Ug < 0
avec
3
us = - iip
s
d'où
3
us = ~ub = ~ue
la sortie recopie le signal sur l'alternance négative.
Ainsi, les relations établies dans les hypothèses iii) et iv) confèrent au montage la fonction de
redresseur à double alternance, sans influence des tensions de seuil des diodes.
314
9. Amplificateur opérationnel : compléments
IV. — INFLUENCE DES IMPERFECTIONS DE L'AO
On sait que, dans un amplificateur opérationnel, l'étage différentiel d'entrée est réalisé avec deux
transistors (cf. chapitre 8). Désignons par ^,+ et 4,- 'es intensités des courants de polarisation, qui
pénètrent respectivement par les entrées + et — de l'AO, et par u0f la tension de décalage (offset) ;
avec deux transistors bipolaires, u0f est la tension base-émetteur de la paire différentielle d'entrée.
Les courants de polarisation varient, selon le type d'amplificateur, de 100 pA à quelques pA,
alors que la tension de décalage peut atteindre quelques mV. Aussi, négligées en première approximation, dans le modèle idéal de l'AO, ces grandeurs doivent-elles être prises en compte dès que l'on
souhaite affiner l'analyse.
IV. 1. — Influence des courants de polarisation dans un montage inverseur
Dans un montage inverseur, on évalue cette influence en introduisant une tension de bruit en sortie,
notée Ui,tS (cf. chapitre 17), donnée pour une tension d'entrée ue nulle (Fig. 9.15).
Z2
r*H
JT
Ub.s
7777
Z3
7777
7777
FIG. 915.
Exprimons les tensions u+ et «_ :
11+ — —Z^ib^
et
U— —
jZi
ib,—
1/Z, + 1/Z2
en appliquant le théorème de Millman au nœud E. Le régime étant linéaire, il vient :
,, S
d ou
u+ = m_
ry .
Z\ {llb s ~ Zllb,— )
- z3ib}+ =
Zi + Z2
Ainsi, la tension Ub^ , qui représente l'erreur sur le signal de sortie, a pour expression :
ry •
Mb,s — ^2^b,—
Z3 (Z, + Z2) .
^
tb,+
Zi
Dans les documents fournis par les constructeurs, on donne le courant de polarisation moyen ip et le
courant de décalage i0f , définis comme suit :
l
p—
lb,+ + 4,2
.
.
1.
L/ — \lb,+
.
|
h,— \
l
Si l'étage différentiel d'entrée présentait une symétrie parfaite, on aurait évidemment i0f = 0. Ces
courants de polarisation se déduisent des paramètres précédents, selon, pour 4,+ > 4,- :
4,+ — lp
^
— lp
^
avec
4
4/
Amplificateur opérationnel : compléments
315
L'influence des courants de polarisation sur le signal de sortie se traduit donc par le signal d'erreur uh^ :
Mb, s —
z?-
Z3 (Z, + Z2)
Z2 +
l
p
z,
Z3(Zi +Z2)
z,
lof
y
avec
.
.
ip > iof
L'erreur est sensiblement réduite si :
Z2 - Z3 ,
Z,
^
Z,
Z2
=0
.
soit
Z3 =
ZjZ?
Z| + z2
La connexion de l'impédance Z3, d'une valeur égale à Z\ et Z2 en parallèle, équivaut à restituer la
symétrie externe de l'étage de polarisation, puisque sur l'entrée inverseuse, Z\ et Z2 sont en parallèle.
Lorsque la condition précédente est réalisée, un écart persiste cependant :
Mb,s —
Z,2lof
L'influence de cette tension d'erreur résiduelle dépend du système considéré.
i) Dans un montage amplificateur inverseur, de fort gain, c'est la résistance R2 qui conditionne
le gain stationnaire —/?2//?i où R\ représente l'impédance d'entrée du montage qui doit être assez
grande, de l'ordre du kO . Comme l'intensité i0f du courant de décalage varie entre quelques pA et
une dizaine de nA, l'erreur lit,s sur la tension stationnaire liée au courant de polarisation est de l'ordre
du mV.
ii) Appliquons à l'entrée du montage intégrateur inverseur pour lequel Zj = /? et Z2 = 1 /{jCco),
avec par exemple /? = 15 kfi et C = 150 pF, un signal d'entrée de forme carrée, d'amplitude
t/o = 1 V, de valeur moyenne nulle et de fréquence / = 23 kHz.
Les résultats de l'analyse faite en supposant l'AO idéal sont expérimentalement confirmés : le
signal de sortie est intégré et sa pente est de signe opposé au signal d'entrée ; alors que la valeur théorique
de cette dernière était C/q/(RC) = 0,44 V ■ jjls-1 , celle mesurée est 0,438 V ■ jjls-1 (Fig. 9.16a).
En revanche, le signal de sortie présente une composante stationnaire importante qui peut être filtrée en aval du montage, avec par exemple un filtre passe-haut, de fréquence de coupure 10 Hz , réalisé
par une cellule CR, dans laquelle C = 150 nF ti R = 100 kli. Une fois cette composante supprimée, on note cependant par endroit une saturation du signal de sortie, laquelle produit une dissymétrie
(Fig. 9.16b).
(V)
Us (V)
Us (V)
fie (V)
1--,
■
43 as
T = 43 jjls
2,6
-4
-1
-13,4
-7,6
t
t
a)
b)
Fig. 9.16.
La compensation des courants de polarisation, par la connexion d'un réseau, constitué par la résistance R en parallèle avec C sur l'entrée non inverseuse, ne suffit pas, puisque l'erreur de tension
316
9. Amplificateur opérationnel : compléments
ubs = —i0f/(jC(o) est intégrée, et par conséquent évolue au cours du temps, d'où la saturation du signal de sortie, en dépit d'un courant i0f très faible.
Rappelons que la solution adoptée dans l'étude introductive du montage intégrateur (cf. chapitre 8)
consistait à placer une résistance R' en parallèle avec le condensateur de contre-réaction ; elle pallie
ce défaut car le courant i0f n'est pas intégré, même si une tension de décalage —R'i0f/R persiste. Le
montage se comporte comme un intégrateur inverseur pour des signaux d'entrée de période T <C R'C.
On illustre l'intérêt de cette solution en choisissant une résistance R' = 2 MO et donc une constante de
temps R'C = 0,3 ms , ce qui permet de satisfaire au critère d'intégration pour des signaux en entrée de
fréquence très supérieure à 3 333 Hz (cf. chapitre 8).
La figure 9.17a confirme l'intégration, au signe près, d'un signal d'entrée de forme carrée et de
s
fréquence 23 kHz. A plus basse fréquence (/ = 5,6 kHz), on observe un signal carré déformé
(Fig. 9.17b).
Remarque : A très basse fréquence (/ = 60 Hz ), la plupart des hannoniques du signal carré sont amplifiés dans un rapport —R'/R = —129 , le montage se comporte en montage amplificateur inverseur.
%e(V)
^ (V)
T = 44 (JIS
rn
rn
r~i
ri
Ue (V)
(V)
T = 178 jjls
r
—l
13,7
I
-1
I
-- 13,7
4,5
w
a)
b)
Fig. 9.17.
IV, 2. — Influence de la tension de décalage
La tension de décalage u0f a des effets sur les montages à comparateurs, mais aussi sur les montages à rétroaction, où elle peut entraîner une valeur moyenne non nulle du signal de sortie.
Dans l'exemple précédent du montage amplificateur inverseur (Fig. 9.15), la tension de décalage
provoque une tension d'erreur :
Ub,s - - (l +
U0f
Dans le montage intégrateur, la solution consistant à placer une résistance R' en parallèle avec le
condensateur permet de ne pas intégrer la tension de décalage qui est stationnaire (Fig. 9.18). Persistera néanmoins l'erreur :
R'
Ub,s - - I 1 +
) %
Amplificateur opérationnel : compléments
Ue (V)
317
«s (V)
(V)
«e (V)
r
I
Lt
7" = 140 ixs
■
7~=| 40 as 1
4,25
2,5
-6
L
I
J
'
-4.25
t
t
b)
a)
Fig. 9.18.
Dans certains AO on peut annuler cette tension de décalage u0f en intercalant une résistance variable entre les deux bornes extérieures de réglage « balance » ou « offset null » (Fig. 9.19a). On obtient
alors un signal intégré idéal (Fig. 9.19b).
Avec compensation
_
«C- V)
>
7 = 43 pis
MV
4,25
2 —
7777
t ioo ka
10 kO
-6,5
Us{V)
H/'
W/
//
é_-V
n//
W/
w
V
*\//
W/
w
V
L— -4,25
Sans compensation
b)
a)
FIG. 9,19.
Remarque : Tous les AO n'offrent pas la possibilité d'un réglage externe de la tension de décalage. On
privilégiera donc, dans le choix de F AO, une faible tension de décalage ou, sous réserve de
ne pas altérer la fonction réalisée, on placera un filtre passe-haut à la sortie. Par exemple,
l'intégrateur décrit plus haut, réalisé par un AO type 2 604 avec compensation de courant,
aura sa tension de décalage compensée par un filtre passe-haut de fréquence de coupure
10 Hz (Fig. 9.19b).
Résumons les étapes dans la réalisation d'un montage intégrateur à l'entrée duquel la tension appliquée est un signal d'entrée carré, de période T, d'amplitude Uo et de valeur moyenne nulle (Fig. 9.20) :
i) on fixe la résistance R connectée sur l'entrée inverseuse qui joue le rôle d'impédance d'entrée
du montage et doit être au minimum de 1 kfl,
ii) on choisit la capacité C qui détennine avec R la pente de l'intégrateur qui vaut UqI{RC) en
valeur absolue,
318
9. Amplificateur opérationnel : compléments
iii) on compense l'intégration des courants de polarisation en plaçant une résistance R' en parallèle
avec le condensateur. Il s'en suit une condition sur la période T des signaux d'entrée : T <C R'C. On
en déduit R1 d'autant plus grand que la pente d'intégration sera grande.
iv) on compense enfin l'influence de la tension de décalage de l'AO soit en filtrant le signal à la
sortie du montage intégrateur, soit par un réglage externe.
R'
c
R
[>
ue
7777
+
7777
Us
7777
Fig. 9.20.
IV. 3. — Tableau comparatif des amplificateurs opérationnels
Selon les modèles d'AO, les paramètres caractéristiques diffèrent. Dans le tableau 9.1, on a rassemblé les grandeurs caractéristiques typiques de l'AO idéal et de quelques composants réels.
Remarque : Les fabricants ne précisent que très rarement la valeur de la fréquence de coupure fCj0 en
boucle ouverte. Les valeurs que nous donnons ici sont déduites de l'équation
Aq = ft
qui suppose que l'AO ne comporte qu'une seule fréquence de coupure, caractéristique
d'un système d'ordre un. Ainsi, la constante de temps rc = 1 /(27rfc/)) vaut 21 ms pour
l'AO 741.
Valeurs
typiques
AO idéal
Nombre
d'AO
LM 741C
TL 081
TL 071C
OPA2604
THS4062
1
1
2
2
2
i2à ±18 V ± 3,5 à ±18 V ± 3,5 à ±18 V ± 5 à ±24 V ± 9 à ±16 V
±Ua
±ua
Ao
oo
200 V ■ mV_1
100 V • mV-1
200 V-mV"1
100 V • mV-1
15 V-mV"1
GM(dB)
oo
106 dB
100 dB
106 dB
100 dB
83,5 dB
ft
oo
1,5 MHz
4 MHz
2 MHz
20 MHz
50 MHz
fc,o
oo
7,5 Hz
40 Hz
20 Hz
200 Hz
3 333 Hz
Rc
00
2 x io6n
1012D
iol2a
10l2a//8 pF
106n//2 pF
h,inax
oo
25 mA
20 mA
40 mA
35 mA
115 mA
Ip
0
80 nA
50 pA
65 pA
100 pA
3 jxA
lof
0
20 nA
25 pA
5 pA
4 pA
75 nA
U0j
0
2 mV
Vm
oo
15 mV
0,5 V-ixs"
1
13 V ■ |xs
-1
Tab. 9.1.
3 mV
1 mV
16 V-ijls"
1
2,5 mV
—
25 V • jxs '
400 V • JJLS-1
Amplificateur opérationnel : compléments
319
CONCLUSION
Retenons les points essentiels.
1) On peut étudier séparément des montages à rétroaction négative et en déduire le facteur d'amplification en tension de l'ensemble connecté en cascade, en multipliant entre eux les facteurs de chaque
montage, pourvu que l'adaptation d'impédance en tension soit réalisée.
2) Il est possible de réaliser des montages à un seul AO possédant un fort gain, grâce à une rétroaction négative constituée de plusieurs cellules passives connectées en cascade.
3) Un amplificateur d'instrumentation amplifie la différence de tension entre deux signaux, en
respectant la symétrie des deux étages d'entrée. On l'utilise pour des applications de traitement de
signaux, lorsque le rapport signal sur bruit est faible.
4) Associés à des diodes, les montages à rétroaction négative réalisent des fonctions non linéaires :
amplificateur logarithmique compensé en température, redresseur, détecteur de crête.
5) L'analyse des imperfections des AO dépend des applications. Par exemple, avec une structure à
fort gain, on privilégiera le choix d'un AO ayant une faible tension de décalage. Quant aux courants de
polarisation des transistors de l'étage différentiel d'entrée d'un AO, on peut neutraliser leurs effets en
veillant au respect de la symétrie électrique du montage.
EXERCICES ET PROBLÈMES
P9- 1. Détermination des caractéristiques d'un AO
On utilise un AO dont la courbe de réponse en fréquence, dans le diagramme de Bode, est
celle représentée sur la figure 9.21. Ses impédances d'entrée et de sortie sont des résistances :
Re = e/L = 100 kO et Rs = ujix = 100 O.
1. Déduire du diagramme de Bode, relatif au gain en boucle ouverte de PAO, le facteur d'amplification stationnaire Aq et la fréquence de coupure fC:0 à —3 dB .
2. Donner l'expression du facteur d'amplification en boucle ouverte A{f) . En déduire la valeur
en dB du gain en boucle ouverte de PAO, à la fréquence /Ci0 .
f G„(dB)
10
102
103
104
105
10^ /(Hz)
Fie. 9.21.
3. On souhaite réaliser un montage amplificateur non inverseur de gain stationnaire Gu = 40 dB .
Proposer un schéma de câblage électrique ; on respectera le code des couleurs : masse en noir avec
câblage en étoile, alimentation positive en rouge, alimentation négative en bleu ; on supposera en outre
que le brochage est le même que celui de PAO LM741 (cf. chapitre 8).
320
9. Amplificateur opérationnel : compléments
P9- 2. Montage suiveur de tension
Un AO, monté en suiveur, est alimenté par deux sources de tension symétriques ±10 V. Les
courants de polarisation sont nuls, la vitesse maximale de balayage vaut vm = 0, 5 V • jxs_l , l'intensité
du courant de saturation est
= ±20 mA, le facteur d'amplification stationnaire Aq = 104 et la
constante de temps tc = 1,6 ms .
1. a) En supposant l'AO idéal, trouver le facteur d'amplification stationnaire en tension r(0) du
montage en boucle fermée. Citer trois limites d'application de l'expression établie précédemment.
b) Établir l'expression de la fonction de transfert T(f ) du montage, en précisant la valeur de la
fréquence de coupure /cv à —3 dB du montage.
2. Quelle est la tension de sortie us{t) de ce montage, en régime établi, lorsque la tension d'entrée
a pour expression :
ue{t) = ue^mcos{27Tfit)
avec
iie>m = 12 V
Étudier successivement les trois cas suivants : /i = 1 kHz, f2 = \ MHz et /s = 10 MHz, on négligera
la limitation due à la vitesse maximale de balayage de l'AO.
3. Dans la bande passante de l'AO, en régime sinusoïdal, établir la valeur maximale de l'amplitude compatible avec une non-saturation en vitesse. Quelle influence ce résultat a-t-il sur les résultats
précédents ? En déduire un critère de choix de l'AO.
4. En négligeant l'influence de la vitesse maximale de balayage, détenniner la tension de sortie us{t) de ce montage lorsque la tension d'entrée est un échelon de tension : ue{t) = EY{t) avec
E = 8 V.
P9- 3. Amplificateur inverseur et amplificateur suiveur
Sur la figure 9.22, dites laquelle des quatre affirmations suivantes est correcte ;
i) les deux montages ont la même fréquence de coupure et un facteur d'amplification stationnaire
respectivement égal à — 1 et 1,
ii) les deux montages ont un facteur d'amplification respectivement égal à —1 et 1 et une fréquence de coupure respectivement égale à /c et 0,5/c ,
iii) les deux montages ont un facteur d'amplification respectivement égal à —1 et 1 et une fréquence de coupure respectivement égale à 0,5fc et fc ,
ïv) les deux montages ont des facteurs d'amplification stationnaires égaux.
10 kO
10 m
[>00
—[
+
ii
+
7777
7777
7777
FIG. 9.22.
7777
7777
Amplificateur opérationnel : compléments
321
P9- 4. Extracteur de racine carrée
Le multiplieur de la figure 9.23a, qui fonctionne avec des tensions d'entrée bipolaires, réalise la
fonction multiplication du composant AD835 :
Ws = Km{X[-X2){Yx-Y2) + Ue
1. Quelle est la dimension physique du coefficient Kin , sachant que X\ , X2, Y\ et Yj sont des
tensions ? Exprimer 11$ en fonction de Ua ■
s
m
2. Etablir la condition pour que le montage de la figure 9.23b soit équivalent à celui de la figure
9.23a, dans lequel on souhaite obtenir, pour Us, la même relation que celle déterminée précédemment
pour Uç).
X,
77/7
K
I
AD835
X
Ri
X
Ua
7777
7777
u
Uo
7777
2R
?
X2
Y\
Yi
7777
a)
Fig. 9.23.
P9- 5. Réalisation d'un oscillateur contrôlé en tension -web.
Dans le montage de la figure 9.24, on suppose que les AO sont alimentés par deux tensions symétriques (non représentées) égales à ±15 V . Les imperfections de l'AO provoquent des tensions de saturation non symétriques avec Usa,t+ = 12 V et Usa!^ = —9 V . Les valeurs des composants sont les
suivantes ; /?i = 1 kO, R2 = 3 kfî, /? = 10 kO , C = 0, 1 jjlF .
1. Quels sont les deux types de montage à base d'AO ?
2. a) Tous les interrupteurs étant ouverts, on ferme les deux interrupteurs Ko et Kj à l'instant
t = 0, alors que u2 = Usat- et us = 9. Trouver la forme du signal us et calculer sa période en
estimant le rapport cyclique à l'état haut.
2. b) Montrer que la période des oscillations a pour expression T = ARCR\IR2 si les seuils de
saturation sont symétriques ( \ USat,-\ = Usat,+ )• En déduire le nouveau rapport cyclique et proposer
une solution technique pour réaliser la symétrie des seuils de saturation.
3. Dans un multiplieur, la tension de sortie us est reliée aux tensions d'entrée uet\ et uet2 selon
iis = Km ue,\uep . Les seuils de saturation sont symétriques et Km = 1 SI. On ouvre K2 et on ferme les
deux interrupteurs K\ et K\ en conservant Kq fermé.
Exprimer la période du signal us en fonction de ue . Conclure sur la fonction obtenue, en donnant
votre avis sur l'endroit où se trouve placé le multiplieur.
322
9. Amplificateur opérationnel : compléments
K
X
a:.
A,
Ao
A2
x
co
"2
7777
7777
7777
7777
Fig. 9.24.
P9- 6. Amplificateurs connectés en cascade
L'amplificateur opérationnel, utilisé dans les deux cellules identiques de la figure 9.25, est caractérisé, en boucle ouverte, par les données techniques suivantes :
i) le facteur d'amplification stationnaire vaut Aq = 104 et la constante de temps tc>0 = 1,6 ms,
ii) les impédances d'entrée et de sortie se réduisent à des résistances, de valeurs respectives
Re = 100 kfi et Rs = 100 0.
Il est en outre précisé que les seuils de saturation en tension sont symétriques, avec AzUsat = ±10 V , et
que les résistances R\ et Rj valent respectivement R\ = 100 O et R2 = 10 kO.
1. L'interrupteur K est ouvert.
a) Calculer le facteur d'amplification Au = u^\/uej de l'AO supposé idéal, en boucle ouverte.
b) En utilisant la conservation du produit facteur d'amplification par la bande passante, trouver la
fréquence de coupure /C)r à —3 dB et la constante de temps TCjr du montage.
c) Tracer le diagramme de Bode relatif à la représentation asymptotique du gain Git de l'AO en
boucle ouverte et en boucle fermée.
2. On connecte en cascade les deux cellules en fermant l'interrupteur K.
a) Établir le facteur d'amplification global T(f ) = uxp/uej du système.
b) Calculer le facteur d'amplification stationnaire et la constante de temps r du système.
c) Tracer sur un même graphe le diagramme de Bode relatif à la représentation asymptotique du
gain du système et d'une seule cellule. Pour quelle fréquence a-t-on une chute de 3 dB du gain ?
3. En supposant H(jù)) de la forme :
H(Jw)
H{0)
(1 ±j<ur)2
trouver, par la transformée de Laplace, la réponse indicielle usp {t) que fournit le système, lorsque la
tension d'entrée ueji{t) est un échelon, d'amplitude E.
Amplificateur opérationnel : compléments
323
oo
K
+
UeA
7777
U
e,2
7777
7777
R
-
U
S,]
OoD
V
r2
u
s.l
Ri
7777
X
Fig. 9.25.
P9- 7. Montage comparateur avec rétroaction positive
Dans le montage représenté sur la figure 9.26, où les AO sont idéaux et alimentés en tensions bipolaires, on a introduit un montage amplificateur inverseur dans la chaîne retour du montage comparateur.
y*
Etablir la relation entre ue et us. Le choix du type d'AO conditionne-t-il la relation obtenue ? Justifier.
ue
'
7777
io m
10 kfl
Us
10 kO
10 kO
7777
^ -
Fig. 9.26.
P9- 8. Analyse d'une fiche technique d'AO et montage non inverseur
1. A partir de la fiche technique de l'amplificateur opérationnel OPA 2604 (Fig. 9.27), estimer les
valeurs du facteur d'amplification stationnaire et de sa constante de temps.
2. On se propose de réaliser un montage amplificateur non inverseur, de gain stationnaire 40 dB
en utilisant PAO OPA 2604.
a) Trouver la fréquence de coupure de ce montage.
b) Calculer la valeur minimale de la résistance de charge Rc compatible avec le courant de saturation.
c) Quelle est la tension maximale autorisée en entrée pour laquelle le phénomène de saturation en
amplitude est évité ?
3. A l'entrée, le signal est sinusoïdal, de fréquence fc . Déterminer la valeur maximale de son amplitude afin que la vitesse maximale de balayage ne soit pas atteinte. Peut-on visualiser expérimentalement cette limitation ?
324
9. Amplificateur opérationnel : compléments
SPECIFICATIONS
ELECTRICAL
At TA = +250C, Vs = 15V, unless otherwise noted.
OPA2604AP, AU
PARAMETER
OFFSET VOLTAGE
Input Offset Voltage
Average Drift
Power Supply Rejection
INPUT BIAS CURRENTd)
Input Bias Current
Input Offset Current
CONDITION
Vs = 5 to 24V
MIN
TYP
MAX
UNITS
5
70
1
8
80
mV
pV/0C
dB
VCM = 0V
Vcm = 0V
NOISE
Input Voltage Noise
Noise Oensity: f = 10Hz
f = 100Hz
f = 1kHz
f = 10kHz
Voltage Noise, BW = 20Hz to 20kH2
Input Bias Current Noise
Current Noise Densily, f = 0.1 Hz to 20kHz
INPUT VOLTAGE RANGE
Common-Mode Input Range
Common-Mode Rejection
Vcm= 12V
12
80
INPUT IMPEDANCE
Differential
Common-Mode
OPEN-LOOP GAIN
Open-Loop Voltage Gain
FREQUENCY RESPONSE
Gaini Bandw dlh Product
Slew Rate
Settling Time: 0.01%
0.1%
Total Harmonie Distortion + Noise (THD+N)
Channel Séparation
OUTPUT
Voltage Output
Current Output
Short Circuit Current
Output Résistance, Open-Loop
POWER SUPPLY
Specified Operating Voltage
Operating Voltage Range
Current, Total Boîh Amplifiera
Vq = 10V, R L = IkQ
80
G = 100
20Vp p, RL= 1kQ
G = —1, 10V Step
15
0 = 1,1 = 1kHz
V0 = 3-5Vrms, RL = 1ka
f = 1kHz, Rl = IkQ
RL = 600Q
V0 = 12V
11
100
4
pA
pA
25
15
11
10
1,5
nV/^Hz
nV/VHz
nVAlHz
nV/VRz
pVp-p
6
fA/vHz
m
V
dB
lO12 II 8
lO12 II 10
Q II pF
Q II pF
100
dB
20
25
1.5
1
0.0003
MHz
V/ps
us
us
%
142
dB
12
35
40
25
V
mA
mA
Q
15
4.5
lo = 0
TEMPERATURE RANGE
Spécification
Storage
Thermal Résistance!2!, gJA
10.5
—25
—40
+85
+125
90
NOTES: (1) Typical performance, measured fully warmed-up. (2) Soldered to circuit boardNsee text.
FlG. 9.27.
24
12
V
V
mA
0
C
C
a
c/w
0
Amplificateur opérationnel : compléments
325
P9- 9. Résistances parasites et choix du nœud connecté à la masse
La mesure de la température d'un corps peut s'effectuer sans contact grâce à un capteur type thermopile, qui transforme, par effet Seebeck, une différence de température en une force électromotrice (cf.
Thermodynamique). Une thermopile, de sensibilité 5 = 710 (jlV.K-1 , est connectée à un montage amplificateur non inverseur de facteur d'amplification 100. L'AO est alimenté par une tension unipolaire
entre 0 et
= 10 V ; l'intensité ic du courant débité est de l'ordre de 7 m A (Fig. 9.28). On assimile la connexion filaire à une résistance parasite Rp de 1,4 fi.
1. Quelles sont l'amplitude du signal parasite et Terreur équivalente sur la température en kelvin,
lorsqu'on connecte la masse au nœud M\ .
2. Justifier qualitativement le choix de la connexion des nœuds Mo ou M3 à la masse.
+
1
[>00
i1
Capteur
7777
U
-i
Mi
H
1M3
Fig. 9.28.
J
10
Filtres actifs
Comme leur nom l'indique, les filtres actifs diffèrent des filtres passifs par la présence d'éléments
actifs, généralement des amplificateurs opérationnels, lesquels apportent l'énergie auxiliaire qui est nécessaire pour que la puissance des signaux en sortie soit supérieure, voire très supérieure, à celle des
signaux d'entrée. Il en résulte que le gain en puissance des filtres actifs, exprimé en dB, est généralement positif.
Les filtres actifs sont caractérisés, comme les filtres passifs, par leurs fonctions de transfert, rapport
de la tension complexe de sortie sur celle d'entrée (cf. chapitre 6) :
H{jco) =!(/■) = ^
Z-e
a) et f = ù)/{27r) étant respectivement la pulsation et la fréquence. Rappelons que ce concept de
fonction de transfert n'a de sens que pour les systèmes linéaires. Le filtre amplifie, atténue ou déphase
différemment les composantes spectrales d'un signal suivant la fréquence.
Dans ce chapitre, on analyse d'abord les différents types de filtres actifs comportant des AO, à partir des expressions canoniques des fonctions de transfert. On présente ensuite différents types de filtres
actifs : cellule de Rauch, cellule de Sallen-Key, cellule universelle, ainsi que les filtres à capacités commutées dont la fréquence de coupure dépend de la fréquence d'ouverture et de fermeture des interrupteurs. Enfin, on tennine sur la synthèse de filtre, c'est-à-dire la réalisation du schéma électronique d'un
filtre à partir de spécifications précises.
I, _ PROPRIÉTÉS des filtres actifs
1.1. — Classification
Rappelons que l'on classe les filtres par leur ordre ou par leur fonction. L'ordre d'un filtre est
le degré le plus élevé des polynômes qui pennettent d'exprimer sa fonction de transfert H{jco). Une
fois cette dernière connue, les techniques d'analyse de Fourier ou de Laplace permettent de passer du
domaine spectral au domaine temporel (cf. annexes 2 et 3).
Comme pour les filtres passifs, on distingue quatre catégories principales de filtre :
i) le filtre passe-bas qui privilégie les signaux de basse fréquence,
ii) le filtre passe-haut qui, au contraire, transmet préférentiellement les signaux de grande fréquence,
Filtres actifs
327
iii) le filtre passe-bande qui ne laisse passer qu'une bande de fréquence,
iv) le filtre coupe-bande ou réjecteur de bande qui atténue les signaux dont la fréquence est située
dans un intervalle spectral déterminé.
1.2. — Gabarits des différents types de filtres actifs
Le gabarit d'un filtre est la zone du diagramme de Bode, avec le gain Gu = 201g
tracé en
fonction de 1g/, dans laquelle on soumet le graphe donnant le module de la fonction de transfert à des
contraintes ; on hachure généralement les régions exclues du diagramme.
a) Filtre actif passe-bas
Pour un filtre passe-bas, le gabarit a l'allure de la courbe représentée sur la figure 10.1 : pour
les faibles fréquences, le gain est important, alors qu'il est faible pour les grandes fréquences. Les
caractéristiques d'un tel filtre sont :
i) la fréquence de coupure fc avec le gain correspondant Gu(fc),
ii) la fréquence d'atténuation fa et le gain associé Gu(fa).
On définit la sélectivité d'un filtre par sa capacité à réaliser la fonction assignée sur un intervalle
spectral déterminé. Le filtre passe-bas est sélectif si fc et fa sont très proches avec Gu(fa) très inférieur
à Gu(fc) ; aussi introduit-on le facteur positif kf, suivant, inférieur ou égal à 1 :
^< i
la
avec k/y = l pour un filtre passe-bas parfait.
'u i
lg/c lg/«
1|
l|
ig/
te
ig/
ig/
r
G.—
■ \
m
ig/«
"3
G,,—
ji
Fig. 10.1.
Fig. 10.2.
b) Filtre actif passe-haut
De façon analogue, on a représenté, sur la figure 10.2, le gabarit d'un filtre passe-haut. La sélectivité
est mesurée par le facteur positif k/j, inférieur à 1 :
= 7 < 1
Je
avec kh = 1 pour un filtre passe-haut parfait.
10. Filtres actifs
328
c) Filtre actif passe-bande
Sur la figure 10.3, on peut voir que le gabarit du filtre passe-bande peut se déduire de la juxtaposition des gabarits d'un filtre passe-haut, de fréquence de coupure /c-i , et d'un filtre passe-bas, de
fréquence de coupure fc^ ■ La différence fC2 —fc,\ est la largeur de bande du filtre, c'est-à-dire l'intervalle de fréquence dans lequel les signaux ne sont pas affectés. Aussi, un filtre passe-bande est-il
caractérisé par son comportement aux fréquences extrêmes, / = 0 et / = oo .
Aussi introduit-on la sélectivité du filtre passe-bande kpb et la largeur de bande relative B, respectivement définies par :
fc 2
- ~fcA
la,2 Ja, I
kpb =
et
fca
B=
~fc-'
JO
/o étant la fréquence centrale du filtre telle que :
ir
lg/c,2 + lg/c,l
'g/o =
2
SO t
fo
=
r \\/2
(fc,lfc,2) '
Gu
Gu
lg/«.l. lg/C,l
lg/c2 }gfa.2
lg/c2
lgfa.2
IgL.I
Ig/cl
G" fa
G" fa
FIG. 10.3.
Fig. 10.4.
d) Filtre actif coupe-bande
Le gabarit de ce filtre, qualifié de réjecteur de bande, est représenté sur la figure 10.4. On le déduit
du gabarit de deux filtres associés, l'un passe-bas, de fréquence de coupure /C)2 , l'autre passe-haut,
de fréquence de coupure /C)| . La sélectivité du filtre coupe-bande et la largeur de bande relative sont
respectivement :
j
fa,\ fa,2
kch =
7
Jc,\ - Je,2
et
jr,
B
faA - fa,2
avec
fo
fo
Remarque : Certains filtres n'introduisent qu'un déphasage du signal de sortie par rapport au signal
d'entrée : \H(jùj)\ = 1 ; ce sont des déphaseurs purs. On les utilise comme correcteurs
de phase pour résoudre des problèmes d'instabilité dans les systèmes bouclés (cf. chapitre 13).
1.3. — Comportement d'un AO en filtre actif
Un exemple simple de filtre actif est fourni par l'amplificateur opérationnel en boucle ouverte ; on
sait que l'AO se comporte comme un filtre passe-bas (cf. chapitre 8). Rappelons que sa fonction de
transfert peut se mettre sous la forme caractéristique d'un filtre passe-bas :
„(j(0)
=
^
e
=
- "df1 +J{o/ù)c
soit
2f{x) —
^(0)
1
ou
^
/
X= — = fc
Filtres actifs
329
représente la pulsation ou la fréquence réduite, fc = 6>c/(27r) la fréquence de coupure de l'AO, H
le facteur d'amplification stationnaire, que l'on note souvent Aq dans le cas de l'AO.
Ordre de grandeur : pour l'AO OPA 2 604 , ces paramètres fournis par le constructeur valent :
ù).~
Ao = 2 x 105 soit Gu - 20 1g Aq = 106 dB et fc= — = 10 Hz
Itt
1.4. — Influence de l'impédance de charge
Reprenons l'exemple du filtre passif RC déjà étudié (cf. chapitre 6) et rappelé sur la figure 10.5a.
On a vu que ce filtre était un filtre passe-bas du premier ordre et que sa fonction de transfert s'écrivait :
TI(■ \
1
ur T+isCo)
Hlj<0) =
soit encore
R
Ue
H{x) =
1
1+jx
R
7777
C
Ue
c:
7777
Rr
T
7777
7777
Us
T
7777"
b)
a)
FIG. 10.5.
En connectant une charge Rc en sortie du filtre, on modifie les caractéristiques du montage de telle sorte
que (Fig. 10.5b) :
Rcj{\ -f jRcC(o)
Rc
~'s
R -\- R,:/(1 + jRcCù)) ~e
R -F Rc + jRRrCoj
puisque, dans le diviseur de tension, ce n'est plus 1 /(JCco) qui intervient mais cette même impédance
en parallèle avec Rc . On en déduit la nouvelle fonction de transfert :
H{j(o) -
R.
1
//
R + R. [1 +j{R//Rc)Cw\
avec
=
RRc
m
On constate qu'apparaissent une nouvelle pulsation de coupure ojc = (R//Rc)C et un nouveau facteur
d'amplification stationnaire H(0) = RC/{R + R, ) •
Ainsi la charge Rc modifie la fonction de transfert d'un filtre passif. On évite cet inconvénient en
connectant la sortie du filtre passif à l'entrée d'un montage suiveur (cf. chapitre 8) ; un tel système, que
l'on réalise aisément à l'aide d'un AO (Fig. 10.6), se comporte en adaptateur d'impédance. L'ensemble
forme alors un filtre actif dont les caractéristiques sont indépendantes de la charge.
OC'
7777
7777
FIG. 10.6.
T
7777 7777
10. Filtres actifs
330
1.5. — Cascade de filtres passifs séparés par des suiveurs
a) Filtres passe-bas identiques en cascade
Plaçons en cascade deux filtres actifs passe-bas identiques, tels que le précédent (Fig. 10.7). On
supprime ainsi l'influence de la charge sur le facteur d'amplification.
oo
7777
7777
Fig. 10.7.
Avec des suiveurs de fonction de transfert unitaire (cf. chapitre 8), la fonction de transfert de l'ensemble est le produit des deux fonctions de transfert des filtres passe bas :
H(jo>) =
1
1
1 -f 2jù)fo)c — tu2/ co:
(I +j(of(Oc
L'expression de la fonction de transfert réduite est donc la suivante :
H{x) =
1
——
1 — x + 2jx
z
avec
0)
f
x= — = —
coc
jc
d'où :
Gu = 201g |77| = —101g [(1 — x2)2 -(- 4x2]
et
2x
4> = arctan
2
x -l
Sur la figure 10.8, on a représenté les deux diagrammes de Bode donnant le gain et la phase en fonction de X = Igx, avec les courbes asymptotiques. On voit que le gain stationnaire est nul, pour
X = 1 , il vaut Gu = —6 dB, et enfin pour X
1 il varie selon la droite asymptote d'équation
Gu = —401gx = —40X.
■ (f) (rad)
'G./dB)
0
X = 1g x
0
X= Igx
""-6^
TT/I-
\\
\
\
-40 -
— TT J
\
b)
a)
Fig. 10,8.
Dans ce dernier cas, le taux de décroissance du gain est de 40 dB • dec
AG„
" = —40
AX
soit
AGm = —40
pour
AX = 1
1
, puisque :
et donc pour
Ax = 10
Filtres actifs
331
Le diagramme de Bode relatif à la phase montre que f = —tt/I rad pour X = 0 Qt f ze —tt rad pour
X> 1.
h) Filtre passe-bas et filtre passe-haut en cascade
Sur la figure 10.9, on a représenté deux filtres, l'un passe-bas constitué d'une cellule R\C] avec
un AO suiveur, l'autre passe-haut formé d'une cellule C2R2 avec un second AO suiveur. Rappelons que
la fonction de transfert du filtre passe-haut C2R2 a pour expression (cf. chapitre 6) :
R
rr f .
2{JÙ))
2
_
Ri + l/ijCico)
1
_
l + l/(jR2C2<o)
1
\-jcoc,2/co
x.
_
aVeC
1
R2C2
OO
Ri
7777
7777
FIG. 10.9.
Le critère d'adaptation d'impédance en tension étant respecté grâce aux propriétés du montage suiveur,
la fonction de transfert de l'ensemble est le produit des deux fonctions de transfert :
1
= Hiijco) H\ {joi) =
(1 -JÛ>c,2/Û>){1 +j(*>lo>c,\
où tOcj = l/(/?|Ci) et (oC:2 = ]/iR2C2) sont les pulsations de coupure de chaque bloc. Il en résulte,
en introduisant les fréquences caractéristiques /Ci 1 et fC)2 :
I
d'où
T(f) =
(i-jfc.i/m +jf/fc,i)
/
/2
G„ = 201g |I(/)| =-101g I 1 + ^- | - 101g ( 1+^
f
f,c,\
Sur la figure 10.10, on a représenté le diagramme de Bode donnant la courbe asymptotique du gain.
Cette cascade d'un filtre passe-bas et d'un filtre passe-haut donne un filtre passe-bande. On voit que le
gain est maximal et vaut 0 entre les fréquences fCt2 et /Cji , avec /C)2 < fc.\ ■ Les pentes de part et
d'autre du plateau à OdB valent respectivement 20dB -dec_I et —20dB dec_l .
Gu (dB)
lg/c-,2
-20--
Fig. 10.10.
Ig/cJ
332
10. Filtres actifs
II. — FILTRES ACTIFS D'ORDRE DEUX
II. 1. — Sensibilité d'un filtre
Même s'il n'y a pas de limite au degré des polynômes qui apparaissent dans la fonction de transfert,
il est souvent nécessaire de concilier une très forte pente de filtrage, laquelle exige un ordre élevé, un
faible coût de réalisation et une faible sensibilité du filtre. Ce dernier paramètre est essentiel dans le
choix de la structure qui réalise la fonction de transfert H(J(o) du filtre.
Afin d'illustrer l'importance de la sensibilité d'un filtre, supposons que dans un montage, dont le facteur
de qualité a pour expression Q = 0, 5(/?i//?2)1^2 , les résistances choisies dans la série E12 soient
connues avec une erreur de 10% . La sensibilité du facteur de qualité du filtre à la résistance R\ est
donnée par le rapport des variations relatives de g et i?i ;
7=
s
dQ/Q
=dQ_Ri=
dR,/R,
dR, Q
1
R1=\l
MR^yr- Q
2
Ainsi, le facteur de qualité de ce montage varie de 5% lorsque la résistance R\ varie de 10% : ce filtre
réduit de moitié l'influence de la variation de l'un de ces composants sur le facteur de qualité.
Il existe diverses structures qui conduisent à différents types de filtres d'ordre deux, appelées hiquadraîiques ; seules celles qui ont une faible sensibilité sont présentées dans la suite. Dans les structures
étudiées, les AO sont supposés idéaux. Cette hypothèse implique nécessairement que les fréquences de
coupure des filtres, construits autour de l'AO, soient inférieures à la fréquence de transition ft de ce dernier (cf. chapitre 8).
II.2. —Cellule de Rauch
La structure de la cellule de Rauch présentée sur la figure (10.1 la) est constituée par cinq dipôles
passifs d'admittances F/ associées en double rétroaction sur un AO. On dit que l'on a réalisé ainsi une
Boucle à Rétroaction Multiple, connue sous l'acronyme MLF (de l'anglais Multiple Loop Feedback).
F4
-
Fs
H/-
c.
X
!
:
7777
R
F5
Fi
ue
Fo
R
R
+
C,
777T
7777
[>co
7777
a)
7777"
Us
7777
b)
FlO. 10.11.
L'AO étant idéal, la rétroaction négative impose une tension différentielle d'entrée nulle, soit
u+ —ii- avec W-}- = 0 (cf. chapitre 8). La fonction de transfert en tension du montage se déduit
aisément, en appliquant le théorème de Millman aux nœuds A et F, ce qui donne respectivement :
Uji + «çF4
F, + F2 + Fs + F4
et
uE = 0 =
-c
UaY2 +«^5
F3 + F5
puisque uE = u+ = 0. On en déduit l'expression .suivante de la fonction de transfert de la cellule de
Filtres actifs
333
Rauch :
M (in) = ^
RU 1
Ue
Y5(Yl + Y2-FY3 + Y4)FY3Y4
Selon la nature des admittances F,, résistances ou condensateurs, on réalise un filtre passe-bas,
passe-haut ou passe-bande.
Exemple : avec Y\ = l/R, Y2 = jC]o), Y3 = X/R, Y4 = 1/R, Y5 = JCjoj (Fig. 10.11b), la
fonction de transfert du filtre devient :
H(jCÔ}
1 - R^-C^o)2 + jo) 3RC2
En introduisant la pulsation caractéristique û)c = {R2C\C2)~^2 et le facteur Q = [C|/(9C2)]i//2 , on
en déduit la fonction de transfert canonique suivante, en fonction de la pulsation ou de la fréquence
réduite x :
-W
=
~l-x*+jx/Q
Cette expression, au signe près, peut être considérée coinine la forme canonique d'un filtre passe-bas
d'ordre deux. Cependant, c'est comme filtre passe-bande que la cellule de Rauch est le plus souvent utilisée, car elle présente l'avantage d'offrir un gain réglable à l'aide d'une résistance, mais sans influence
sur la fréquence de coupure (cf. Exercices).
Remarque : De nombreux logiciels permettent de représenter le module et l'argument d'une fonction
de transfert, à partir de son expression dans l'espace de Fourier ou dans celui de Laplace
(cf. annexe 3). En fonction de p, la fonction de transfert H(p) devient, en remplaçant jco
par p :
I + 3RC2P + R-CtC^j)2
1 + p{T/Q) + T~p'
avec
r=
II. 3. — Cellule de Sallen-Key
L'architecture d'une cellule de Sallen-Key, du nom des électroniciens américains R. Sallen et
E. Key qui la proposèrent en 1955, est construite sur la base d'un montage amplificateur non-inverseur,
de facteur d'amplification en tension Au (Fig. 10.12a), et d'une rétroaction positive par un ensemble
d'admittances F, (Fig. 10.12b). En appliquant le théorème de Millman aux nœuds A et E, il vient, respectivement, l'AO étant idéal :
ueY\ + UsY2 + m^FS
F, + F2 -F F3
et
uF =
Y3 + Y4
A,,
A» = 1 F R2/R\ étant le facteur d'amplification en tension de l'AO monté en non-inverseur. On en
déduit, en égalant les deux expressions de ua :
lie F i F lis Y2 F ME ^3 _ F3 F F4
Fi F F2 F F3
~
AnY3
:
ce qui donne, en simplifiant ;
jj/
[}Û))
Mj
AUY\ F3
~ Me ~ {Yi + F2)(F3 F F4) F F3(F4
avec
AnF2)
/!„ = 1 F -7
A,
334
10. Filtres actifs
. XI
>
T
13
777/
777/
R!
R'
7777
R'
R'
7777
b)
a)
FIG. 10.12.
Considérons la cellule de Sallen-Key pour laquelle (Fig. 10.13) :
F2 — jC2C0
Ct
Y4 — jC[(0
2
2
soit
La fonction de transfert Hifoj) devient alors :
H{jù)) =
1 + jR[2Cy + C2{1 - Au)\o> - R CyC2(0
mo)
Hix)
=
W
"
1 - X2 +
en introduisant le facteur d'amplification stationnaire 7Y(0), la pulsation de coupure ojc et le facteur
de qualité Q, respectivement :
R'.
H(0)=Au = l + ^
= (R^Cj)-'/2
et
(2 =
1
, 2
2(C1/C2) / [1 — {Au — 1)C2/{2C|
On retrouve ainsi l'expression d'un filtre passe-bas d'ordre deux. Le montage est stable si Q est positif,
ce qui entraîne la condition suivante sur Ai( :
A;( < 1 + 2^C2
soit
1 + ^7 < 1 + 2^c2
<-
C,
Fig. 10.13.
Remarques : 1) On introduit souvent, à la place de (2, le facteur d'amortissement m = 1/i2Q) .
2) C'est le plus souvent sous la forme d'une cellule passe-bas ou passe-haut que l'on utilise
la cellule de Sallen-Key, puisqu'elle est assez peu sensible à la variation des éléments
passifs qui la constituent (cf. Exercices).
Filtres actifs
335
II. 4, — Cellule de Kerwin-Huelsman-Newcomb
Cette structure, proposée en 1967 par les électroniciens américains W. Kervin, L. Huelsman et
R. Newcomb, est réalisée en connectant en cascade un montage amplificateur non inverseur, et deux
montages intégrateurs, avec deux rétroactions, l'une négative et l'autre positive (Fig. 10.14). Entre u{ ,
«2 et u3 , on a, en régime sinusoïdal, les relations suivantes, que l'on obtient en appliquant le théorème
de Millman aux entrées inverseuses de A02 et A03 (cf. chapitre 8) :
Il |
Hi —
JRCOJ
d'où
_1
R2C2OJ2
—2
jRCco
M3 =
'X,
Ml
777/
{2a - 1 )/?i
AO
U->
AO2
AO3
7777
"3
7777
FIG. 10.14.
Appliquons le théorème de Millman aux deux entrées de l'AOl, de même tension puisque l'AO est
idéal. T1 vient :
uelR\U2/\{2a — V)R\\
Uj_ , = —
r-rrA
,
-+4
11/J?,
/o. _u
1 /[/Oxv _
np.i
+ l/[(2a
— l)R\
.
soit
(2a — l)ue + U2
2a
M_j_ j =
—-1-0
et :
u 11 =
-~'
m/R + lls/R
M) + M3
;
:— =
l/R+i/R
2
{2a — l)ue + 112
a
d'où
uu
2a
=
U\ + M3
2
Cette cellule est qualifiée d'universelle en raison des propriétés de chacune des sorties.
i) si la tension de sortie est «3, la cellule se comporte comme un filtre passe-bas :
M3
2a — 1
1
Uç
a
\ + jùyRCj a — R2C2co2
ii) si la tension de sortie est m, , c'est un filtre passe-haut :
«i
2a — 1
—R2C2Û)2
m^
a
1 + jojRC / a — R2C2ù)2
iii) si la tension de sortie est 112 , c'est un filtre passe-bande :
1*2
2a- 1
—JRCoj
Ug
a
1 + joiRC/a — R2C2ù}1
avec, dans les trois cas, un facteur de qualité Q égal à a.
On obtient toutes les formes canoniques de filtre d'ordre deux, en associant ces trois cellules à un
quatrième AO monté en sommateur (Fig. 10.15). En effet, le théorème de Millman appliqué à l'entrée
inverseuse de cet AO donne :
0
Hs/RA +
"h {£2/^2
l/R4 -F l/R'3 + l/R'2 + \/R\
Ra
, £*3
R
Ra
/ —2
R
Ra
/ Ml
R
Le circuit UAF42 (Universal Active Filter en anglais) est un exemple de cellule universelle.
336
10. Filtres actifs
Ri
«3
7777
x
U2
«1
|+ A04
7777
7777
FlG. 10.15.
II. 5. — Cellule de Tow-Thomas
La cellule de J. Tow et L. Thomas présente la particularité d'avoir les entrées non inverseuses
de trois AO directement reliées à la masse (Fig. 10.16). On minimise ainsi l'influence des capacités
parasites. En revanche, il faut s'assurer que les courants de polarisation des AO sont bien symétriques
afin de limiter leur influence (cf. chapitre 9).
aR
ex
+
Ui
AO
X
OC
AO2
AO3
FIG. 10.16.
Comme les trois AO fonctionnent en régime linéaire, on a, pour chacun d'eux, «+ = il- = 0. Le
théorème de Millman, appliqué aux nœuds E, F et G, donne, respectivement :
0=
u^/R
u^/R + U\ [!/{«/?) + jC(o\
0=
1//?+ 1//?+ \l(aR)+iCù}
m, /R + u-fCco
1 j R T jCù)
0=
U2/R + «3/F
1/F+l/F
On obtient alors, en effectuant :
1 + jaRCco
—3
a
vi j
rt2
ll-y =
M-j
jRCco
et
«3 = —«2 —
Il j
jRCco
Analysons les propriétés de chacune des sorties :
i) si la tension de sortie est u3 :
1 + jaRCco
u3 = —— jRCcoth
—3
a
1, v
d ou
i±3
— =
1 + jcoRC/a - R2C2co2
La cellule se comporte comme un filtre passe-bas avec Q = a .
ii) si la tension de sortie est m, :
«i = —jRCco «2 = jRCco u3 = jRCco
/
—ue
La cellule est passe-bande avec Q = a.
1 + jaRCco
a
«j
\
d'où
— =
—jRCco
1 + jcoRC/a — R2C2co1
337
Filtres actifs
II. 6. — Cellule de Akerberg-Mossberg
Alors que les deux cellules précédentes sont bien adaptées à des filtres dont la fréquence de travail
est très inférieure à la fréquence de transition f, des AO (cf. chapitre 8), on constate expérimentalement,
au voisinage de f, une dégradation du facteur de qualité. Dans ces conditions, la cellule proposée
en 1972 par les ingénieurs suédois D. Akerberg et K. Mossberg, que l'on a représentée sur la figure
10.17 , s'avère plus performante, en partie grâce à l'AOB placé dans la rétroaction du second montage
intégrateur.
aR
x
«3
O.
AO
ACh
7777
AO.
FIG. 10.17.
Notons que, même si rA02 semble câblé en rétroaction positive, il est en rétroaction négative et
fonctionne en régime linéaire, puisque le signal «3 est rendu négatif par l'AOS inverseur. Comme les
relations entre les tensions sont identiques à celles écrites pour la cellule de Tow et Thomas, on a :
Mj
Uç
—1
2
2
2
1 + jù)RC/a — R C û)
«2
—jRCù)
Uç
1 + jcoRCja — R2C2(o2
II. 7. — Filtres à capacités commutées
Les filtres à capacités commutées sont constitués par des condensateurs, des interrupteurs analogiques, périodiquement fermés et ouverts, et des AO montés en intégrateurs. Ces filtres, proposés pour
la première fois en 1972, présentent l'intérêt d'avoir une fréquence de coupure paramétrable.
a) Résistance apparente
Dans le montage simple de la figure 10.18a, on ferme alternativement l'interrupteur K\ puis l'interrupteur K2 , de façon alternée, grâce à un signal d'horloge, de période Tk, produit par un oscillateur
piloté par un quartz (Fig. 10.18b). Chaque interrupteur est fermé puis ouvert pendant la durée Tk/2, ce
que Ton réalise grâce aux deux tensions de commande pouvant prendre les valeurs 1 ou 0 ; lorsque le
premier vaut 1, le second est 0 et vice-versa.
Pour simplifier, admettons les hypothèses suivantes :
i) le condensateur est placé entre deux sources idéales de tension,
ii) la fréquence d'horloge f: est grande devant la fréquence d'évolution des signaux ue et us,
iii) les interrupteurs K\ et K2 , qui ne sont jamais dans le même état, sont réalisés avec des transistors MOS (cf. chapitre 7),
iv) le régime établi est atteint entre deux signaux d'horloge,
y) la capacité C du condensateur, qui peut être faible si elle est intégrée dans le circuit, doit être
supérieure aux capacités parasites des connexions.
10. Filtres actifs
338
^U\
Ki
•
1
r
IL
*
K,
P
_
0
us
Tk
*
t i «2
0
^2
nb)
a)
FTG. 10.18.
À chaque période 7^ , la charge
transférée de l'entrée vers la sortie a pour expression :
ù^q = C{us — ue)
Il en résulte que, pendant une durée t
courant s'écrivent respectivement :
q —
ik
T/., la charge transférée q et l'intensité moyenne Im du
é-/: (u.v
uf)
et
Jm —
—
— ~~
(wy
1
k
'
tif)
ce qui s'écrit aussi, en introduisant la fréquence de commutation fk = 1 /Tk :
a, — u* =
fkCk
soit
lis — iie = Ra Im
avec
Ra =
fkCk
par analogie formelle avec la loi d'Ohm. La commutation du condensateur peut donc être assimilée à
une résistance apparente Ra , qui s'exprime en ohm, en fonction de Ck et de fk .
b) Intégrateur à capacités commutées
Transformons le montage intégrateur classique représenté sur la figure 10.19a en remplaçant la
résistance d'attaque R par une capacité commutée Ck (Fig. 10.19 b), grâce à un interrupteur K dont
la fréquence de commutation est fk = 1 /7)-.
C
C
1
2
K
777/
7777
7777
7777
Ck
7777
7777
7777
b)
0
FTG. 10.19.
À l'instant t, alors que K est en position 1, le condensateur de commutation, de capacité Ck , se
charge sous la tension ue :
Aqk{t) = Ckue{t)
Filtres actifs
339
À l'instant / + 7^/2, on bascule l'interrupteur K en position 2. Le condensateur de commutation
se décharge dans le condensateur d'intégration ; tic varie alors de :
Aqk(t)
Ck
Amc = —= ue{t) —
On en déduit la relation suivante, à l'instant t + T^, juste avant le retour de K en position 1 :
uc(t -f Tf) = uc{t) + Aiic
d'où, puisque, l'AO étant idéal, us{t) = —uc{t) ■
F
Us{t + Tk) = -Uc{t) -
F
= Us(t) - Ue(t)-^
Cette dernière relation s'écrit dans l'espace de Fourier (cf. annexe 2) :
us{f ) exp(/27r/rA-) = «,(/') " %if )^
soit
%{f) [l - txpQlTrjTk)\ =
On en déduit la fonction de transfert en régime harmonique :
T(f\ =
_
%{f)
c
k
1
_
C exp(/27T/T/;) - 1
Ck
c\p{~j7TjTk)
C z\\){jTTjTk) — exp{—777/^-)
Pour un signal, de fréquence / très inférieure à fk, soit
=
Ck exp(—/tt/T/,)
2C sin(7r/7t)
]
<C 1, on trouve en développant :
1
Tif) ~J
~ ■Ck 2^/^
-\J)
c
On voit ainsi que le montage intégrateur inverseur, dans lequel on a remplacé la résistance par une
capacité commutée, conserve sa fonction initiale d'intégration :
Z(f) « -7
j2nfTkC
jf/fc
avec
fc =
ITTTICC
puisque
27TR,,C
Ra = —
En fonction de la variable jco, les relations précédentes s'écriraient :
ZI/- \ ^
^
Hijùj)
1
jco ifC
avec
jco/coc
Ck ==-—
l
wc = —
TkC
RaC
.
puisque
Tk
D = —
R
a
Ck
Ce montage intégrateur à capacités commutées présente ainsi deux avantages : d'une part, sa fréquence
de coupure fc = coc/{27r) est contrôlée par la fréquence de fermeture des interrupteurs fk = \/Tk ;
d'autre part, comme fc fait apparaître le rapport de la capacité de commutation Ck sur celle d'intégration C, elle est insensible à leurs variations :
d (oc
d Tk
dCk
dC
ùjc
Tk
Ck
C
dCk
dC
Ck ~ C
III. — SYNTHESE DE FILTRES
Effectuer la synthèse d'un filtre consiste à établir l'expression de la fonction de transfert qui respecte un ensemble de contraintes, rassemblées selon un gabarit, puis à réaliser le circuit correspondant.
Montrons d'abord comment l'on peut ramener l'étude de tous les types de filtre à celle du seul filtre
passe-bas, par des changements de variables convenables.
10. Filtres actifs
340
III. 1. — Transformations
a) Transformation d'un filtre passe-haut en filtre passe-bas
Rappelons les expressions canoniques des fonctions de transfert de deux filtres d'ordre un, le premier passe-bas et le second passe-haut (cf. chapitre 6), respectivement :
Hh(jco)=Hh(0)-
1
et
1 -f j(o/cOc
Hh(j(o)=Hh{0)-
jù)/(Oc
1 +j(x)fù)c
En fonction de la fréquence normalisée x = co/coc =f/fc , ces fonctions de transfert s'écrivent :
24 O) = Hb (0)
1
1
.
+ JX
24 (Jx) = Kh (0) T~7: =
1 + jx
et
(0)
l + (Jx] -1
On voit ainsi que l'on passe aisément d'un filtre passe-bas à un filtre passe-haut et vice-versa, en changeant seulement la variable (Jx) en (Jx) ~1 .
Sur la figure 10.20, on a représenté le gabarit, en fonction de ^ = f/fc, d'un filtre passe-haut,
fc étant la fréquence de coupure. Le changement jx en (jx)~[ implique, dans le diagramme de Bode
relatif au gain, le changement de variable x en Ijx.
Notons que cela change X = Igx en son opposé —X = — Igx. Ainsi, tout point de l'axe des
abscisses se transforme alors en son symétrique par rapport à l'axe des ordonnées passant par X = 0. Il
en résulte que, par retournement, le gabarit du filtre passe-haut est identique à celui du filtre passe-bas.
1 'Gu
X= Igx
0
s
s
/
/
/
/
Filtre
/
passe-haut /
/
\
Filtre
\ passe-bas
Fig. 10.20.
Ce changement de variable est le même pour des filtres passe-bas et passe-haut d'ordre deux. En
effet :
i
O)'
et 240) = 0,(0)
24 O) = nb((fy
2
i + (/•*)/Q + O)
i + 0)/ô + O)2
soit, en divisant cette dernière expression par (jx)2 :
i
240) = nh(Q)
l
i + 0)" /ô + 0)"2
b) Transformation d'un filtre passe-bande ou coupe-bande en filtre passe-bas
La juxtaposition des gabarits de deux filtres, l'un passe-haut et l'autre passe-bas, donne un gabarit de filtre passe-bande ou coupe-bande (Fig. 10.3 et 10.4). Rappelons les expressions réduites des
341
Filtres actifs
fonctions de transfert de filtres passe-bande et coupe-bande, respectivement ;
nph{ii) = npb{0) j
+
^2 ^
e,
^(j*) = Hcbio)
i +
J^aï)2
où ô sst le facteur de qualité de ces filtres, avec respectivement, pour le filtre passe-bande, puis pour le
filtre coupe-bande :
Q = ——
Ul-fc.l
et
Q= ——
fa,2-fa,l
/o étant la fréquence centrale. Ces deux fonctions de transfert s'écrivent aussi :
^ = npii,0)l
u
^x)
+ Q/(jl) + (Jx)Q
= n
^0) i + om + o-)-']
et
et
ncbQx) = nA0)TTm^TW]
^(/■v) = wrf.(o)1
+ 2_l[(/x) + w_1]_I
On passe ainsi du filtre passe-bas au filtre passe-bande et réciproquement en effectuant les remplacements suivants, respectivement :
(Jx)
par
Q (Jx) + (jx)'
et
(jx)
par
O
1
(Jx) + (Jx)
III. 2. — Détermination de la fonction de transfert à partir du gabarit
L'analyse précédente permet de ramener l'étude de tout type de filtre à celle de la fonction de
transfert du filtre passe-bas, compatible avec les contraintes de son gabarit, lesquelles sont données par
les valeurs Gu c et Gt^a du gain aux fréquences caractéristiques fc et fa du filtre.
Analytiquement, le problème à résoudre revient à détenuiner le module \'H{x)\ de la fonction de
transfert du filtre, à partir des contraintes suivantes :
i) pour x = l , G,, = GU}c,
ii) pour .t < 1, on doit avoir Gu = 201g |2i(x)| > G,ljC avec une atténuation réduite,
iii) pour x > 1 , c'est-à-dire dans la bande atténuée du filtre passe-bas, on doit avoir Gu <
avec fa=fc/k, k étant le facteur de sélectivité du filtre.
On ne sait calculer analytiquement qu'un petit nombre de fonctions caractéristiques répondant à ces
critères. On classe ces fonctions en deux catégories selon que ces fonctions se présentent sous la forme
d'un polynôme (Butterworth, Chebyshew, Legendre, etc.) ou sous la forme d'une fraction rationnelle
(fonctions de Cauer, Chebyshew inversé, etc.).
Pour un gabarit donné, cette seconde forme en fractions rationnelles donnera un filtre d'ordre inférieur, au prix d'une plus grande difficulté de réalisation et de réglage. Dans la suite, on se limitera aux
fonctions de transfert de Butterworth et de Chebyshew.
Remarque : Il existe plusieurs orthographes de Chebyshew ; on trouve aussi Chebychev, Chebycheff,
ou encore Tchebycheff, ce qui est évidemment lié à la difficulté de transcription de la
langue russe dans notre alphabet.
342
10. Filtres actifs
a) Fonction de transfert de Butterworth
La fonction de transfert de Butterworth , qui satisfait aux trois contraintes énoncées plus haut, est
telle que :
B{x) = \H{jx)\
(14-/32*2")1/2
où n est l'ordre du filtre et f> un paramètre traduisant l'atténuation à la fréquence de coupure. Les
conditions imposées par le gabarit du filtre passe-bas permettent de déterminer les valeurs de /3 et n
qui définissent la fonction de Butterworth. En se plaçant à / = /c et / =/« , on trouve :
— I01g(l + fi2) = G,iC
et
-101g(H-/32.v2")<G1,„
Supposons que la fonction de Butterworth admette une atténuation de 3 dB à la fréquence de coupure
fc du filtre, quel que soit l'ordre. Le facteur /3 est alors égal à 1 . On en déduit l'ordre minimal du filtre
selon, sachant que xu =fa/fc •
_ x]
lg(l 4 xl") > —^
d'où
xl" > lO^/10) - 1
et
n >
2\gxn
Pour obtenir la transmittance du filtre qui satisfait aux critères du gabarit, on cherche la fonction £3(v)
qui admet IfLix) \ comme module, les racines du dénominateur, appelées les pôles devant impérativement être à partie réelle négative sous peine d'instabilité du filtre (cf. chapitre 13). Ainsi, dans l'hypothèse où
= 1, la fonction B{x) associée à la fonction de transfert de Butterworth se réduit à la
détermination des racines n-ièmes de 1 avec partie réelle négative. Le tableau 10.1 donne les fonctions d'atténuation I3{x) jusqu'à l'ordre n = 6 inclus.
Ordre
du filtre
Inverse H
1
(jx) des fonctions d'atténuation normalisées de Butterworth
pour (3 = 1
i + (ix)
l 4 V2{jx) 4 (Jx)2
(1 -\-jx)[[ F jx 4 (Jx)2] = 1 4 2jx 4 2(/.\-)2 4 (jx)3
[1 4 1, 848/v 4 (jx)2] [1 4 0.7653/* 4 (jx)2] =
1 4 2,613/* 4 3,414(/*)2 4 2,613(/*)3 4 (jx)
(1 +jx)[l 4 0, 618j*: 4 (j^)2][l 4 1, 6lSjx 4 (jx)2] =
1 4 3,236/* 4 5,236(jx)2 4 5,236(Jx)3 4 3,236(/*)4 4 (jx)5
[1 4 V2jx 4 (/x)2][l 4 l1932jx 4 (jx)2]ll 4 0,5176# 4 (jx)2] =
1 4 3, 864/* 4 7,464(jx)2 4 9, ]42(jx)3 4 7,464(/x)4 4 3, 864(/*)5 4 (jx)6
Tab. 10.1.
b) Fonction de transfert de Chebyshew
La fonction de transfert de Chebyshew est de la forme :
cosh(x) = \H(jx)\ =
[i + r2c2(.v)]'/2
Filtres actifs
343
n étant Tordre du filtre, y un facteur et
suivante :
Co(x) = 1
un polynôme défini selon la formule de récurrence
C| (x) = A'
et
Cll+\ (a) = 2aC„(a) - C„_i (a)
La contrainte du gabarit sur la fréquence de coupure est facile à prendre en compte, car, pour cette
fréquence ( a = 1 ), tous les polynômes sont égaux à 1 . Il vient donc ;
Gu(fc) = 20\g\H{l)\ = -101g(l + y2)
d'où
y2 =
- 1
Ainsi :
pour
Gu>c = -3 dB
y2 = 100'3 - 1 = 10Ig2 -1=2-1 = 1
i) Pour a ^ 1 , on simplifie les polynômes en effectuant le changement de variable a = cos f . Il
vient :
Cq = 1
Ci = cos f
€2 = 2 cos f C\ — Cq = 2 cos2 é — \ — cos(2<^)
En supposant la récurrence vraie à Tordre n, on a C,, = cos(n^), ce qui donne à Tordre n + 1 :
C„+i{a) = 2cos(f) cosfif) — cos[(rt — 1)^»] cos[(n + l)4>\ + cos[(« — 1)(^] — cos[(/î — 1)0]
soit cos[(n + 1)0]. Ainsi, pour a ^ 1 , C„(a) = cos(n0) étant toujours inférieur ou égal à 1, la
courbe de réponse du gain en dB varie entre 0 et — 101g(l + y2) .
ii) Pour a > 1 , on ne peut évidemment plus utiliser le changement de variable précédent. Cependant, si a
1 , on peut se ramener à une progression géométrique, de raison 2a . En effet :
Cyj (a) « 2AC„_i(A)
entraîne :
C„{x) = [Ixy-'C, = {2.v)2C„_2{,ï) = ■ ■ • = (Ivy-'C, = {2xy-'x = l-{2xf
pour /r ^ 1. La fonction module cosh(A) devient alors :
cosh(A) = |KW -
[1 + y2 (2a)2"/4l C2 ^ y (2a)"
d'où :
avec
/c
" = u)
2
et
G„ = 201g|r(/')| = 20 ;i (Ig/c, - 1g/)
On en déduit que Tasymptote de la courbe donnant le gain en fonction de 1g/ est une droite de pente
—20n dB • dec_l , qui passe par le point d'abscisse correspondant à la fréquence feu ■
Une fois les paramètres y et n fixés, le premier par l'ondulation maximale acceptée dans la
bande passante, le second par la pente de Tasymptote du gain, on détermine la fonction de transfert en
cherchant les racines, à partie réelle négative, de |2fWI •
Le tableau 10.2 présente les polynômes C„(a) jusqu'à Tordre n = 6 inclus.
344
10. Filtres actifs
Polynôme de Chebyshew
Ordre du
filtre
C„(x)
1
X
2
2x2 — 1
3
4x3 - 3x
4
8x4 - 8x2 -f 1
5
16x5 — 20x3 + 5x
6
36x6 — 48x4 -F 18x2 — 1
Tab. 10.2.
III. 3. — Exemple de synthèse de filtre
Proposons-nous de réaliser la synthèse d'un filtre passe-bas pour lequel F affaiblissement maximal
est de 1 dB , de 0 à 1 kHz, alors que l'affaiblissement minimal est de 40 dB , au-delà de 2 kHz.
On trace d'abord le gabarit du filtre spécifié, en normalisant les unités comme sur la figure 10.21.
Gu (dB)
/ (kHz)
1--
-40-FlG. 10.21.
On détermine ensuite le facteur y2 à partir de l'ondulation résiduelle dans la bande passante ; si
cette dernière vaut 1 dB , alors :
Gu{fc) = -1 dB
d'où
y1 = lO^"^/101 - 1 = 10l/l0 - 1 « 0,259
On en déduit la fonction de transfert du filtre en cherchant les racines à partie réelle négative de l'équation :
1 + y2Cl(x) = 0
soit
1 -f (101/10 - 1) C25(x) = 0
pour un filtre d'ordre 5, puisque, pour Gu = —40 àB , xa = 2 et y « 0,51 , on a :
20 In
2
y{2xyi
ce qui donne
n « 4, 8
La résolution numérique, à l'aide de Matlab par exemple, fournit les racines suivantes, à partie réelle
négative :
X! = -0,0895 i; 0,9901
x2 = -0, 2342 i^/ 0,6119
X3 = -0,2895
345
Filtres actifs
La recomposition du polynôme à partir de ces racines conduit à l'expression de la fonction de transfert.
On obtient :
Hijx) =
1
5
4
8, U{Jx) + 7,63(jx) + 13,750)3 + 7,93(jx)2 + 4,73(jx) + 1
ce qui se met sous la forme d'un produit de trois fonctions, deux d'ordre deux et une d'ordre un :
~ [l,0118(;x)2+0,181(/x) +1] [2,3294(Jx)2 + 1,0911 (Jx) + l] [3,45530x) + l]
On réalise le circuit correspondant en connectant en cascade, deux cellules d'ordre 2, type Sallen-Key,
et une cellule d'ordre 1 type RC. Comme la fonction de transfert de la cellule Sallen-Key, représentée
sur la figure 10.13, a pour expression :
Hsk(JM) =
A,
2
avec
2
/? CIC2(/U>) + {J(o)R[2Ci + (1 - AU)C2] + 1
A.j =
r
R
R
on trouve, en identifiant, les relations suivantes entre les valeurs des composants :
i) pour la première cellule type Sallen-Key :
/?2C,C2û)2 = 1,0118
et
2RCiù)c = 0,181
avec
Au = 1
ii) pour la seconde cellule type Sallen-Key :
C2(o2c = 2,3294
et
2RC2ù)c = 1,0911
avec
/C = 1
iii) pour la cellule RC :
RCCO, = 3,4553
En choisissant fc = 1 kHz et R = 10 kO, on en déduit les valeurs des autres composants. Sur la
figure 10.22, on a explicité l'architecture du filtre avec les valeurs des composants.
178 nF
10 kii
10 m
y
1.44 nF
7777
68 nF
10 ktl
H
■C
10 W.
1-41
10 kfi
8,58 nF
77
77
i
54,92 nF
ttVT
Fig. 10.22.
Remarques : 1) Comme les valeurs obtenues pour les composants ne seront pas toutes disponibles, il
conviendra, avec des filtres nécessitant une forte précision, de contrôler les conséquences
d'un choix de valeurs normalisées.
2) Les impédances d'entrée des cellules de Sallen-Key, doivent être assez grandes, afin
de satisfaire aux contraintes de non-saturation en courant et d'adaptation d'impédance ; la
multiplication des fonctions de transfert des cellules biquadratiques s'effectue alors sans
perte (cf. chapitre 9).
10. Filtres actifs
346
CONCLUSION
Retenons les points essentiels.
1) Les filtres actifs, que l'on réalise avec des éléments actifs tels que des AO, présentent l'intérêt
de pouvoir être connectés entre eux sans modification de leurs caractéristiques, ce qui permet une étude
préalable de chacun d'eux.
2) Plusieurs exemples de filtres actifs sont largement utilisés : cellule de Rauch, cellule de SallenKey et la cellule universelle.
3) Un filtre actif à capacités commutées présente deux avantages : sa fonction de transfert dépend
d'une part du quotient de deux capacités, ce qui garantit une valeur pratiquement constante, d'autre part
de la fréquence de fermeture et d'ouverture des interrupteurs, ce qui permet de choisir la fréquence de
coupure.
4) L'étude d'un filtre à partir des spécifications de son gabarit peut se ramener à celle d'un filtre
passe-bas équivalent, grâce à un changement de variable. Quant à sa résolution, elle exige de travailler
avec des grandeurs normalisées, et d'approcher la fonction de transfert souhaitée à l'aide de fonctions
de transfert polynomiales, par exemple les polynômes de Chebyshew.
EXERCICES ET PROBLÈMES
P10- 1. Diagrammes de Bode d'un filtre avec ou sans AO
On souhaite comparer les performances d'un filtre passif et d'un filtre actif.
1. Un filtre passif est constitué d'un résister, de résistance R\ = 10 kfl, et d'un condensateur, de
capacité Cj = 1 nF (Fig. 10.23a).
a) Établir la fonction de transfert H\ (jef) = T, (f) — iix/ue. Calculer la constante de temps ti du
c
zs
r\l
montage.
b) Tracer les diagrammes asymptotiques de T_{ (f) dans le plan de Bode. Préciser la valeur de /C)|
fréquence de coupure du montage. Quel type de filtre obtient-on ?
c) Calculer la réponse du montage au signal d'entrée iie{î) = EY{t) avec E — 10 V, Y(r) étant
la fonction échelon de tension. On suppose le condensateur déchargé à t = 0.
'C
>•
û.
2. Dans le montage de la figure 10.23b, les tensions d'alimentation de PAO sont de ±15 V . La
fonction de transfert du système actif est la suivante :
u f \
Us
lle
u /m
1
+ÎÙ>T\
1 -\-JÙ)T2
347
Filtres actifs
a) Établir les expressions de H2{0), t\ et t? .
b) Sachant que R2 = 100 kli et C2 = 10 nF, trouver la valeur de R\ pour laquelle le gain
correspondant à /^(O) vaut 40 dB . En déduire les deux fréquences de coupure.
c) Tracer le diagramme asymptotique de Bode relatif au gain. Proposer un nom fonctionnel au
montage.
C2
C,
Ri
Rx
I><
R\ Us
+
T
7777 ////
7777
7777
ue
7777
7777
a)
b)
Fig. 10.23.
P10- 2. Filtre actif passe-bande
Dans le montage de la figure 10.24 où F AO est idéal, les valeurs des composants sont les suivantes :
C, = 10 nF , C2 = 1 nF et R] = R2 = 10 kO .
1. Établir l'expression de la fonction de transfert H(jco).
2. Pour quelle(s) fréquence(s) le module \H(Jco)\ est-il maximal ? Calculer cette valeur maximale
et conclure sur le type de filtre.
C2
S
Ri
A
1
Ri
7777
C
ue
C
R/2
7777"
7777
Fig. 10.24.
P10- 3. Filtre actif réjecteur de bande
FIG. 10.25.
: wet>
Montrer que le filtre actif de la figure 10.25 est réjecteur de bande.
P10- 4. Calcul d'un filtre passif passe-bande
Dans le montage en tt de la figure 10.26a, les valeurs des composants passifs sont les suivantes
Ra — Rb — 50 Q,, La — Lb — 10 |xH, Ca — Ch — 330 pF, Lc — 18 jxH et Cc — 220 pF.
10. Filtres actifs
348
1. Montrer que le réseau peut être représenté par le schéma de la figure 10.26b. Donner alors les
expressions de ie , Za ,
et Zc .
2. Déterminer la pulsation ù)\ qui annule Zc et calculer la valeur de la fréquence f correspondante.
3. Pour quelle pulsation ruo l'impédance Za est-elle purement résistive ? Calculer la fréquence /o
associée.
4. Établir l'expression suivante de la fonction de transfert H(j(o) =
H (jeu) =
pour Zt, = Zn = l/Ya :
1
RaYa {ZcYa + 2)
5. On étudie à présent la fonction de transfert obtenue en remplaçant Ya et Zc par leurs expressions.
a) Montrer que, pour les basses fréquences, H(joj) peut être mis sous la forme :
(0
H (Jv) = [J—
\ ^3
dans laquelle to^, est une pulsation que l'on calculera. En déduire la valeur correspondante de fo .
b) Quelle est l'expression de la fonction de transfert H (Joj) pour des fréquences voisines de f\ et
fo ?
c) Analyser H (joj) pour les hautes fréquences ; on calculera la fréquence /4 qui caractérise ce
domaine spectral.
6. En déduire les propriétés du montage.
Cr.
Ue
Ra
Ca
1
\Lb
Cb\
La
iek
r
Rh Us
Zc
z.
z,,
'
X
■à)
U
b)
Fie. 10.26.
P10- 5. Simulateur d'inductance et filtre actif
Dans les montages des figures 10.27a et 10.27b, les AO impliqués sont idéaux et les composants
valent : Rn = lOkfl, R3 = 22kfi, C| = InF et C2 = 10 nF.
1. Montrer que le dipôle, situé entre les points A et M de la figure 10.27a, est équivalent à un
dipôle Z constitué par la mise en série d'éléments R':L', C' dont on déterminera les expressions et les
valeurs.
2. On insère le dipôle Z dans le circuit de la figure 10.27b. Calculer la fonction de transfert H{jco)
en fonction de R',L', C et des éléments du montage.
3. Quelle est la valeur de R{ pour laquelle \H(jû)c)\ = 0, &»c étant la pulsation de résonance du
dipôle /?', Z/, C ? Calculer la valeur de la fréquence associée fc .
Filtres actifs
349
4. Sachant que |//(/wc)| — 0, déterminer les pulsations ojc^ et coc^ pour lesquelles le gain vaut
—3 dB . Donner les fréquences associées /c.i et /C)2 . Etablir l'expression de la Largeur de Bande Relative {LBR) du filtre et calculer sa valeur :
Me,2 — MCj i
LBR =
(0,
_
\> X
Ro
Ro
«y,0
'<2
C2
t>130
7777
A
jf
Ue\ 0
:
7777
Ri
A
L
+
H.
7777
«o
IM
7777
M
b)
FlO. 10.27.
P10- 6. Filtre actif en structure de Rauch
Dans le filtre actif, en structure de Rauch, représenté sur la figure 10.28, l'amplificateur opérationnel, supposé idéal, fonctionne en régime linéaire. La tension d'entrée ue sinusoïdale, s'écrit, en notation
complexe
= ue^m exp(/W) = iie^m QxpijlTrft), ue>m étant l'amplitude, co la pulsation et / la fréquence.
1. Etablir l'expression de la fonction de transfert du système, entre la tension d'entrée et la tension
de sortie us, en fonction des admittances des composants Fi , ¥2 , L3 ,
et Es (Fig. 10.28) :
H{j(û) = T{f) =
^ '
-K"
Y\Y-x
7
Y2Ya + Y5(Y{ + Y2 + Y?> + Ya)
2. On analyse le cas où les composants 1, 3 et 4 sont des résistors, de même résistance R, et où
les composants 2 et 5 sont des condensateurs, de même capacité C.
a) Dessiner un schéma du filtre. En analysant les cas extrêmes des très basses puis des très hautes
fréquences, trouver la nature du filtre, passe-bas, passe-haut ou passe-bande.
b) Expliciter la fonction de transfert Tff) et tracer le diagramme de Bode donnant le gain en
fonction de 1g/. Calculer la ou les fréquences de coupure à —3 dB, sachant que R = \2 kfi et
C= 15 nF.
3. Les composants 2, 3 et 4 sont à présent des résistors, de même résistance R, et les composants
1 et 5 sont des condensateurs, de capacités respectives C\ et C2.
a) Dessiner le schéma du filtre. En analysant les cas extrêmes des très basses puis des très hautes
fréquences, établir que le filtre est de type passe-bande.
b) Expliciter la fonction de transfert T_{f), en introduisant f =1/(2ttRC\ ) et /2 — 1/(27rRC2).
Montrer que son module passe par un maximum pour une valeur f) de la fréquence que l'on exprimera en fonction de R, Ci et C2 - Application numérique ; calculer /o, sachant que R = 5 kfi,
Ci = 300 nF et C2 = 300 pF.
10. Filtres actifs
350
_
'3
Ur
7777
> >c
II.
Y2
7777
7777
Fig. 10.28.
P10- 7. Filtres actifs passe-bas et passe-haut en structure de Rauch Cwëb)
La figure 10.29a représente le schéma d'un filtre d'ordre deux.
1. Établir l'expression de sa fonction de transfert H(Jco). Quelles sont les caractéristiques de ce
filtre, fréquence de coupure et facteur de qualité ?
2. On souhaite réaliser un filtre passe-haut, de fréquence de coupure 100 kHz ayant les caractéristiques précédentes, en utilisant des condensateurs de capacité de 1 nF.
Montrer que le schéma de la figure 10.29b conduit à la réalisation d'un tel filtre. Donner les valeurs
des résistances R\ et
qui confèrent au filtre les caractéristiques souhaitées.
10 kii
380 pF
X
10 kii
10 kii
2 nF
Ri
7777
7777
7777
7777
7777
b)
a)
FIG. 10.29.
P10- 8. Filtre passe-bande en structure de Rauch
Le montage de la figure 10.30 représente un filtre passe-bande.
1. Etablir l'expression de sa fonction de transfert.
2. Les deux condensateurs ayant la même capacité C, montrer que la fonction de transfert peut se
mettre sous la forme canonique suivante :
= -7^(0)T-777
y
l+Wô-a-2
avec
x= —
En déduire l'expression du facteur d'amplification stationnaire r(0), de la pulsation de coupure wc et
du facteur de qualité Q . Quelle est la nature de ce filtre ?
3. On souhaite filtrer un signal dont les fréquences sont comprises entre 190 kHz et 210 kHz.
a) Sachant que la bande passante à —3 dB est égale à ù)cjQ, détenniner les composants du filtre
en fonction de C, T(0), Aw et û>c .
351
Filtres actifs
b. Le filtre étant très sélectif, on suppose satisfaite la condition :
1/2
CO,
im\
Énumérer les étapes de réglage du filtre et calculer la valeur des composants sachant que C = 0,1 nF
et que le gain du filtre est 20 dB .
Cl
Ri
Ci
rfr
7777
TtTT
FIG. 10.30.
P10- 9. Filtre passe-bande en structure de Sallen-Key
Le montage de la figure 10.31 représente un filtre passe-bande en structure de Sallen-Key.
1. Établir l'expression suivante de la fonction de transfert :
a(.v) = K(0)1
-ec
.v = |
dans laquelle 7i{0), Q et fc sont à déterminer.
2. Établir l'expression de la bande passante à —3 dB .
3. Énumérer les étapes de réglage du filtre passe-bande. Quelles sont les limites du modèle ?
X
Ri
7777
*4
7777
7777
7777
Rj
FIG. 10.31.
P10- 10. Filtre actif du deuxième ordre
Dans le filtre actif représenté sur la figure 10.32, les résistances R\ et Rj sont égales à 2,2 kfi et
les capacités Ci et C2 à 470 pF et 1 nF respectivement.
1. En appliquant le théorème de Millman au point A , situé entre les deux résistances, et au point
S de sortie de l'AO, établir l'expression de la fonction de transfert H(jo)) du montage.
352
10. Filtres actifs
*1
—[
+
H—I
A
>0°
7777
7777
FIG. 10.32.
2. Montrer que cette fonction de transfert est bien décrite par la fonction suivante :
U{x)
1 - v +jxlQ
dans laquelle x est une fréquence réduite, rapport de la pulsation oj du signal d'entrée sur une pulsation
caractéristique (Oq que l'on exprimera en fonction de R] , Rj , Ci et C2 , et Q un facteur que l'on
reliera à û>o , C) , /?i et
• Calculer coq , la fréquence /o correspondante, ainsi que Q .
3. Étudier le sens de variation de |KWI ■ Tracer les diagrammes de Bode (gain et phase) du filtre
ainsi constitué, en fonction de X = 1g x. Quelle est la nature du filtre ?
4. Retrouver la nature de ce filtre à l'aide de considérations uniquement qualitatives.
P10- 11. Sensibilité d'un filtre actif
Dans la structure du filtre actif de la figure 10.33, les deux condensateurs ont des capacités de
même gamme, égales respectivement à /3C et yC.
1. Établir la fonction de transfert H(jù)) du montage.
2. Quelle est l'expression de la fonction de transfert ftijx), dans laquelle x est la fréquence réduite
de référence celle définie par RCcoq = 1 ? En déduire le facteur de qualité Q du montage.
3. Estimer l'erreur sur le paramètre Q due à l'erreur de précision de la capacité yC, y variant de
1 % avec la température.
4. Même question lorsque
varie de la même quantité. Conclure sur la structure du filtre.
pc
[>00
A
7777
7777"
FIG. 10.33.
11
Oscillations couplées en électricité
L'étude des régimes transitoires (cf. chapitre 4) a permis de montrer qu'un système linéaire, d'ordre
supérieur ou égal à deux, pouvait présenter, en régime libre, des oscillations qui, sauf entretien, s'amortissaient au cours du temps.
Il arrive que deux ou plus de ces systèmes, susceptibles d'être le siège d'oscillations indépendantes, entrent en interaction ; ces systèmes oscillent encore, mais différemment, avec des propriétés
qui dépendent de leurs caractéristiques, ainsi que de la nature de cette interaction. Les oscillations sont
alors dites couplées.
On rencontre souvent le couplage d'oscillateurs en physique, par exemple en mécanique (cf. Mécanique) et en physique quantique (cf. Quantique).
Nous nous proposons d'étudier le comportement des circuits linéaires couplés, en commençant par
l'analyse de deux circuits couplés, puis en l'étendant aux systèmes constitués de N circuits identiques.
I. — CIRCUITS COUPLES EN REGIME LIBRE
Dans le système représenté sur la figure 11.1, deux circuits électroniques oscillants interagissent
par l'intermédiaire de la capacité C\2 d'un condensateur de couplage ; C\ et Cj sont les capacités,
L\ et Lj les inductances, /*] et r2 les résistances des bobinages des deux circuits respectivement. Les
pulsations propres de ces circuits en l'absence d'interaction sont bien connues :
et
0)2
Le générateur parfait, présent dans le circuit 1, sert à exciter les oscillateurs. La période T du signal
qu'il fournit est très grande devant les périodes propres Ty = Itt/coi et T2 = 27r/û>2 des circuits :
7 > 7,
et
7 > 72
Si l'impédance Z12 de la capacité C12 est très inférieure à la plus faible des impédances dans le circuit, le condensateur de couplage est équivalent à un simple fil de connexion, les deux circuits sont
indépendants.
Les équations qui régissent ces circuits sont alors les suivantes, avec des notations explicitées sur
la figure ;
1 d «|
2
9
u\ + ri q + L\
H
h &)| U\ = ojj ue
T 1 dr
354
11. Oscillations couplées
puisque ui = q\/C\ , i\ = dq\/ôt, T\ = L\/R\ , et :
^
T d ii
Ml + f2l2 d" Ll-.— — 0
dt
.
SOIt
d2 u2
0
z
dt
\
] dui
2
;
\- OJ, Ui — 0
ti dt
puisque, de façon analogue, ui = qi/Ci, ii = dqi/ df, ti = L2/R2 ■ Précisons que les intensités i\
et ii sont orientées vers les armatures des condensateurs de charges respectives q\ et qi.
Dans la suite, nous supposons que chacun des deux systèmes présente une réponse libre pseudopériodique.
UL,
n
q\
UL2
®5SS®M
C2
L
C12!
c.
i\
n
«12
02
U2
Ci
q2
12
Ue ru
FlG. I I.I.
1.1. — Oscillations libres du circuit 1 en Pabsence de couplage
Établissons, en l'absence de couplage entre les deux circuits, le lien entre la réponse du circuit 1 à
des signaux carrés et la réponse que ce même circuit fournit en régime libre (cf. chapitre 4).
a) Réponse en régime libre
Remplaçons la source de tension par un interrupteur que l'on ferme à un instant pris comme origine.
Si le condensateur 1 est initialement chargé, le circuit est le siège d'oscillations libres de la charge q\
du condensateur et donc de la tension à ses bornes. On sait que la réponse de ce circuit, en régime libre,
se met sous la forme (cf. chapitre 3) :
u\,t(t) = Ai exp(rit) +B/exp(r2r)
où ri et ri sont les racines complexes de l'équation caractéristique :
r2 + - + ^ = 0
D
Les constantes Ai et Bi sont déterminées par les conditions initiales sur la tension et sur l'intensité sont
les suivantes : ii\ (0) = «o et q (0) = 0, précisément par le système linéaire d'équations algébriques
suivant :
Ai -f 5/ = mq et T\ Ai -F ro 5/ = 0
issu des expressions générales précédentes de u\j(i) et i\,i(t) = Cd uij(t) / dt ,h r = O.Onen déduit
aisément :
1
. n
-n/f'l
Ai —
7— Mo et Bi —
7— MQ
1 — f\/f2
1 — D / f'2
Ainsi, une première méthode d'obtention des oscillations libres d'un circuit consiste à charger d'abord
le condensateur, le circuit étant ouvert, puis à fenner ce dernier à un instant pris comme origine des
oscillations.
Oscillations couplées
355
b) Réponse indicielle
Réintroduisons la source de tension dans le circuit. Elle délivre une tension échelon iie = EY{t).
Si le condensateur 1 est initialement déchargé, la réponse indicielle du circuit a pour expression :
u\ti(t) = A/exp(ri/-) + S/expfo/1) + E
Comme précédemment, les constantes Aj et 5, sont déterminées par les conditions initiales sur la
tension sur et l'intensité du courant ;
Ai + Bj = —E
et
r\ A/ + ^ B; = 0
d'où :
Ai = —
et
i-ri/r2
81=
r r2
^ i g
i-r\/r2
En comparant la réponse indicielle à la réponse en régime libre pour laquelle le condensateur 1 est
initialement chargé sous la tension U] (0) = E, on voit aisément que A/ = —A/ et 5, = —fî/. Les deux
réponses sont donc liées par l'équation :
wuO) — E —
c) Réponse à une tension carrée
La source de tension délivre maintenant des signaux carrés, symétriques, d'amplitude E et de
basse fréquence, de sorte que le régime établi soit atteint à chaque alternance. Le passage d'une alternance négative à une alternance positive modifie les conditions initiales selon :
Ac -f- Bc Y E — —E
et
r\ Ac -j- ro Bc — 0
et
Bc= - r'///"2/ 1E
\-r]/r2
d'où:
Ac =
— 2E
1 — C\j rj
On voit que :
Ac = —2Ai
et
Bc = —2Bi
Par conséquent, la réponse du système à la transition de l'alternance négative vers l'alternance positive
est reliée à la réponse en régime libre par l'équation :
c
S
o
(M
£
M^c(r) = E-2uij/(r)
Par un raisonnement similaire, on obtient, pour la transition de l'alternance positive vers l'alternance
négative :
uyc{t) = 2u\j{t) — E
CL
Il en résulte qu'une méthode d'obtention des oscillations libres d'un circuit (cf. chapitre 3) consiste
à utiliser comme source de tension, des signaux carrés, de fréquence assez basse, afin que ces derniers se comportent comme une succession de signaux échelons. L'évolution de la tension ii\ aux
bornes du condensateur, observée sur un oscilloscope, s'identifie alors, à un facteur multiplicatif et à
une constante additive près, à la réponse libre de la charge q\ du condensateur, avec pour conditions
initiales : <?] (0) =
et dq/ d /(0) = 0. Cette seconde méthode est préférable sur le plan expérimental, car plus simple à mettre en œuvre.
11. Oscillations couplées
356
1.2. — Équations des circuits couplés en l'absence de résistance
Intéressons-nous aux oscillations libres du système des deux circuits oscillants, couplés par la
capacité C12 ■ La source de tension est remplacée par un interrupteur que l'on ferme à l'instant pris
comme origine. Le condensateur 1 porte initialement la charge q\ (0), le condensateur 2 la charge
<22 {0} ; quant au condensateur de couplage, il est initialement déchargé.
Supposons que les résistances du circuit soient négligeables
considérablement l'analyse sans la modifier qualitativement.
^ 0 et /?2 ~ 0), ce qui simplifie
La loi des mailles appliquée aux deux circuits donne respectivement (Fig. 11.1) :
dfi
H| + L\ —
dr
.
h U\2 = 0
.
SOlt
S)
_ d zq
L\C[
^
dr
U | + U\2 — 0
7" dï2
Ih +, Lo—
" dr
U [9 — A
0
'
V
SOlt
r ^ d2M2
L-yO-)——
" " d r2
lll — U[2 — 0
r
r
car i\{î) = C[ô.u\/àt, Z2(t) = C2&U2I dt et «12 = qvi/Cn .
Comme Z]2 = i\ — 12 = dqi/ dt — dqj/ dr, il vient, en intégrant, compte tenu des conditions
initiales :
<?I2 = q\ (0 - q\ (0) - qiit) + ^2(0)
Le système d'équations couplées devient alors :
/d2?i. (1
L| d^+ A
Cl
r
i2
^,(0) -<?2(0)
C|2
C12
<22(0) -^(0)
d2
^ , H ,
1
dT^ + l^ + c;
C|2
Il présente un second membre constant qui ne dépend que de la charge initiale des condensateurs. Notons
que ce second membre, au coefficient C12 près, s'identifie à la charge de la portion du circuit isolé
des générateurs. Il est judicieux d'introduire les charges d'équilibre q\ie et <22,c correspondantes à la
solution particulière du système. Ces charges sont celles des condensateurs 1 et 2 que l'on obtiendrait
à l'équilibre en présence de résistances. En effet, dans ce cas, la dissipation d'énergie par effet Joule
conduirait à la disparition de la solution des équations sans second membre.
Ces charges à l'équilibre satisfont aux équations suivantes :
C,
C,
1 _
9,(0)- <?2(0)
q2,e —
r
<-12
<-12
r
61
( 1
VCl
1
+
C12
qi.e - T^q\,e =
<-12
<?2(0) - gl(0)
C|2
La résolution de ce système donne, après simplification :
9i.e = „ Xr Vr ^ ® ~
C] -(- C2 + C12
et
qi c =
rlTr Vr "
C-I + C2 + <-12
Notons que, si le système n'est pas dissipatif, les charges d'équilibre correspondent à des solutions
jamais atteintes. Dans la pratique, il est naturel d'introduire les écarts Q\{t) et (22(0 des charges des
condensateurs, par rapport aux charges d'équilibre :
Qi(0 = q\(0 - q\.e
et
<22(0 = 92(0 - <?2,<
357
Oscillations couplées
Le système d'équations devient alors homogène et s'écrit :
d2Ôi
( 1
1 \ ^
1
^
. ,.22 + ( 77^ + j r ) Q\ - j r Qi — 0
d/
\L|C|
L\C]2/
L\ Ci2
et
+
{piQ,
+
L^Cn)
02
= 0
"
Cette démarche est comparable à celle adoptée en mécanique pour l'élude de deux masselottes reliées
par des ressorts (cf. Mécanique). Dans ce cas, les variables adaptées sont les écarts des masselottes par
rapport à leurs positions finales.
Si l'on modifie les charges initiales des condensateurs, seules varient les charges d'équilibre. L'introduction des écarts de charge conduit donc aux mêmes équations, quelles que soient les conditions
initiales.
1.3. — Nature des oscillations
On résout le système précédent d'équations différentielles en cherchant des solutions oscillantes
de formes complexes :
Q = Ai cxpijùt)
et
Q2 = A2 exp(Jflt)
il étant un nombre réel. En injectant ce type de solution dans les équations différentielles, on obtient
le système suivant de deux équations algébriques :
+
"cl;'4l
+
+
(_a■i2+à+^)y,2
=
0
=
0
Les solutions en fl2 ne présentent de l'intérêt que si les amplitudes A] et A2 sont différentes de zéro ;
aussi le déterminant de leur coefficient doit-il être nul, ce qui fournit l'équation caractéristique suivante :
(_tf £i + i- +
+ i- + A) _ (1_)
=
0
En divisant par L1L2 et en développant, on obtient l'équation du deuxième degré en O2 suivante :
a4 - a2
9
coï
^
L\Ci2
L2C12/
LjCn
9 9
cosco^ — 0
L\C\
laquelle admet toujours deux racines réelles et positives fi2 et fi2 ; nous envisagerons plus loin le cas
singulier où l'une des racines est nulle.
Remarque: Avec un couplage négligeable (Z12 = 0 soit C12 infini), on devrait retrouver pour fi les
deux pulsations propres des circuits. C'est bien ce que l'on obtient à partir de l'équation
réduite :
fi4 — a2
+ oX) + ùy\(i)2 — 0
qui admet effectivement comme racines a2 = ùj] et a2 = ws.
11. Oscillations couplées
358
La solution générale du système différentiel est une combinaison linéaire de solutions complexes
de la forme exip(j£ï\t),
, exp^/TLO et exp(—. Par conséquent, elle s'écrit :
Q\ = A]] cos(fi]/4- ^i) H-A^cos^t + <^2)
et
£2 = Aji cosfOit + 0|) + A22Cos(n2t + <^2)
le premier indice des ternies d'amplitude étant relatif au circuit 1 ou 2 et le second à la pulsation fi|
ou fÏ2.11 vient donc, en condensant l'écriture :
Q\it) = ^2A]pcosiÇïpt + 4>p)
Q2{t) = ^2A2pCOs{ùpt + (f)p)
et
Les amplitudes A[p et A2P ne sont pas indépendantes, puisque suivant la valeur de
vaut, d'après le système algébrique précédent :
1
^ = 5, = -nîLlC,2 + ^
et
leur rapport
^ = 82 = -Ù\LxCn + ^ + 1
A12
C\
Finalement, Q\ et Q2 ont pour expressions respectives :
Q\ij) =
cos(%r + (l>p)
et
Qjit) =
BpAip cos{flpt + 0/,)
Les conditions initiales, au nombre de quatre :
<2i(0)
=
q\ (0) — q],e = ^i(O) -
QliO)
=
22(0) - q2,e = qiiO) -
^(0)
=
^(0) = 0
et
Cl
Ci + C2 H- C12
C2
Cl + C2 -f- C|2
tei(O) -r/2(0)]
1^2(0) -r/i(0)]
^(0) = ^(0) = 0
permettent de déterminer complètement les constantes An , A12 , 0i et 02 , selon :
Al ) cos0i
COS 01 A Ai2cos02
Ai2 cos 02
An
cos 0i A 52Ai2COS02
i^A 12 cos 02
SiAn cos0i
=
—
Q\{0)
62(0)
An sin0i AA12sin02
fijAn sin 0i A ^2^12 sin 02
=
=
0
0
En substituant, dans les deux premières équations, les expressions de sin 0] , sin 02, cos 0| et
obtenues à l'aide des deux dernières, on trouve :
A12 sin 02(^1 —82)
=
0
A|2 COS 02 (jB| —82)
=
01(0)^1 ~ Q-lity
A,, sin0l (S2 — S,)
=
0
Ancos0i (S2-B,)
=
<2i(0)52 - ^(O)
On obtient alors les constantes :
2,(0)6,-22(0)
'
4l1
^
62
6,
Ap —
ai(o)B, -^2(0)
82 — B[
01 ~ 0
Oscillations couplées
359
1.4. — Étude complète d'un système symétrique
Le cas symétrique, pour lequel L\ = Li = L et C\ = C2 = C, est très important car le couplage
des deux oscillateurs est alors maximal. Comme to] — o)\ — oy^ , l'équation caractéristique devient :
1
fi4 - 2fi2 ( a)l
2
co.
OJn — 0
0
LCn
de racines :
t il — (On
et
fii — (On
LCn
fii et fi2 étant les pulsations propres du système. Comme, dans ce cas :
B\ = -a\LCn + ^ + 1 = 1
et
£2 =
+ ^ + 1 = -1
il vient :
Q\ (t) — An cos(fii? -p ^1 ) L A12 cos(fi2f + ^2)
Avec les conditions initiales, £2i(0)
obtient :
B2
Al1
=
- 1
02(0 — A| 1 cos(fiit -P ^1 ) — A12 cos(fi2t "P ^2)
Qo , 02(0) = 0, [àQ\/ d t] (0) = 0 et [d Qij d/-](0) = 0, on
A12 — —Qo
Bo — Bi
= 1
(^>1=0
02 = 0
La solution précise est donc :
Qi =
[cos(fiir) + cos^r)]
et
Qi =
[cos(fiir) — cos(fi2f)]
Ainsi, l'évolution des charges Q\ et Qi n'&st pas harmonique, mais une combinaison simple de deux
oscillations harmoniques (Fig. 11.2).
<220
Qi(t)
I
W
w
y
'W
M
FIG. 11.2.
Notons cependant que leur somme Q\ -P Q2 et leur différence Q\ — Q2 évoluent, elles, harmoniquement avec les pulsations respectives fl| et O2 :
ôi + Ô2 = ôocos(fiir)
et
Q] - Q2 = Qo cos{fl2t)
Exemple : avec L = 100 mH, C = C12 = 1 piF et un condensateur initialement chargé sous 5 V,
on obtient :
qo = 5 (xC
/, = ^- « 500 Hz
277"
et
/2 = ^ « 870 Hz
277
11. Oscillations couplées
360
1.5. — Écriture matricielle
On pourrait écrire les équations différentielles du système sous une forme matricielle plus condensée. En effet, si l'on note d'une part [Q] et [A] les matrices colonnes des charges et des amplitudes,
d'autre part [L] et [C-1] les matrices carrées des inductances et des inverses des capacités :
[2] =
L\
o
W =
0
u
[c ']= [1/Cl + !./Cl2
-1/C,2
I/C2 + I/C12
le système d'équations différentielles s'écrit :
[^[0 + Ie"1!®
=
M
Le vecteur colonne solution, d'expression :
[Q] = aI
ex
P(/^0
donne, une fois injecté dans l'équation précédente, (— [LjO2 + [C-1]) [A] = [0], ce qui entraîne, puisque
[A] 7^ 0 :
det {—[L]fi2 + [C-1]) = 0
On obtient ainsi, sous une forme concise, l'équation caractéristique donnant les deux pulsations propres.
On en déduit alors la relation entre A) et A2, pour les deux pulsations propres, à l'aide de l'équation :
Liil" -f- 1/Cj + I/C12
1/0(2
i/cl2
1 p,
—L2O- + I/C2 + I/C12 A2
II. — MODES PROPRES OU NORMAUX DE VIBRATION
II. 1, — Définition
On appelle modes propres ou normaux de vibration d'un système les modes de vibration harmonique. Us sont réalisés pour des conditions initiales particulières qui annulent, dans la superposition des
solutions harmoniques, toutes les contributions sauf l'une d'entre elles. Montrons qu'il en est bien ainsi
sur l'exemple symétrique précédent.
Si les condensateurs 1 et 2 portent initialement la même charge, q\{0) = <?2(0) = q® , et si aucun
courant ne parcourt les circuits, il vient, d'après ce qui précède :
Q\(0) = qi (0) -q]te = 4o
et
£2(0) = ^2(0) - q2,e = qo
Par conséquent :
qo
0
=
=
Au cos^]+Ai2cos02
—fî|Ai] sin <£]--LLA^ sin <^2
Qo
0
=
=
An COS <£1 — A12 cos <^2
—fiiAn sin (£1 + fUA^ sin (£2
On en déduit que 0] = 0 , 02 = 0, Ai 1 = qo et A12 = 0, précisément :
Q[(t) = qocos(flit)
et
Qif) = <?oCOs(fV)
Ainsi, l'ensemble oscille, de façon hannonique, à la pulsation fl] . On dit que ces conditions initiales
choisies ont excité la première pulsation propre Hi .
Oscillations couplées
361
Pour réaliser ces conditions initiales, on utilise deux sources de tension carrée, synchronisées, basse
fréquence, que l'on insère dans les circuits, comme le montre la figure 11.3a. Les deux sources ayant un
point commun, on peut les obtenir à partir du même générateur.
C 12
C
J
mmii
L
mrn^
L
C
Ug nu
J
WW^
L
c
iig nu
WW^
L
C\2'.
C
iig ru
b)
a) Mode symétrique
Ue ru
Mode antisymétrique
Fie. 11.3.
b) Mode 2
Si les condensateurs 1 et 2 portent initialement des charges opposées, q\ (0) = —qj(0) = qo , et
si aucun courant ne parcourt les circuits, on a, comme précédemment :
<2i(0)
=
qi (0) — q\je = qo
Qi (0)
=
^2(0) — q2,e = —qo
1
2C
C\2
2C + C12
2C + C\2
qo = Qo
2C
2C + C12
= -Qo
Par conséquent :
Qo
0
=
=
An cos^i + Ai2Cos^>2
—HiAii sin</»] — n2Ai2 sin02
-Qo
0
=
—
Al 1 COS (f>\ — A|2 cos </>2
—a,A,, sin^i -h •n2Ai2 sin^>2
On en déduit (f)\ = 0, (j>2 = 0 , Au =0 et A\2 = qo , soit :
Q\{t) = Qo cos (112 r)
et
Q2Q) = -^ocosf^O
Ces nouvelles conditions initiales ont excité la seconde pulsation propre 112 •
Comme précédemment, on peut réaliser ce jeu de conditions initiales, en utilisant deux sources de
tension carrée, synchrones, basse fréquence, incorporées dans les circuits, comme sur la figure 11.3b.
Les deux sources n'ont pas, dans ce cas, de potentiel commun, ce qui nécessite une tension symétrique.
On peut, par exemple, utiliser un générateur basse fréquence capable de fournir deux signaux carrés,
de même amplitude, mais en opposition de phase. Il est également possible d'utiliser un inverseur de
tension pour produire la tension symétrique à partir d'une même source.
II. 2. — Détermination des modes normaux de vibration
Pour connaître les modes normaux de vibration d'un système, il suffit d'injecter successivement
dans les équations différentielles les solutions de la forme Ai exp(Jflt) et At exp(/flf) ; on obtient
alors un système d'équations algébriques en A] et A2 dont on annule le déterminant de la matrice
formée par les coefficients de A1 et A2 .
362
11. Oscillations couplées
a) Bobines et condensateur en dérivation
Si le circuit est composé de deux bobines et d'un condensateur montés en parallèle comme le
montre la figure 11.4a, les équations différentielles s'obtiennent aisément, à partir des équations précédentes, en faisant 1/Ci = I/C2 = 0 et C12 = C :
d" Q\
, Q\ - Qi
UC
=0
Qi , Qi — Q\
=0
dt7
L2C
et
Notons que le circuit de la figure 11.4b étant identique, sa mise en équation doit conduire au même
système ; en effet, en appliquant la loi des mailles, on trouve :
, r d2Q2
r d'ûi
n
Il
——r- + Li
, 0 =0
dt'
d t2
^
et
r
I2
d2Q2
dP
Q,-Q2
=a
0
C
équivalent au précédent. Il suffit alors de soustraire la seconde équation à la première, pour retrouver le
même système.
Ii
«C L2
C
II
Uj
U2
I2S "2
c:
uc
A 02
12
b)
a)
Fie. 11.4.
Injectons les solutions harmoniques dans le système d'équations différentielles. On obtient les
équations algébriques suivantes :
-IVI, + C
A, - -A2
C
1
—fi"l2 + — | A2
1
A!
C 1
=0
— 0
L'équation caractéristique du deuxième degré en fï2 s'en déduit aisément :
iV
c KL,
=0
I2
d'où les deux pulsations propres :
1/2
fii = 0
et
02
La pulsation flj = 0 correspond à un courant stationnaire d'intensité Iq , dans les inductances. En
effet :
<2i - 62 = 0
d'où
dîl
=0
et
dt
- il = lo
Le condensateur est déchargé et sa branche parcourue par aucun courant.
Oscillations couplées
363
Avec la pulsation fb , les courants dans les inductances sont en opposition de phase.
Comme :
8,=^ = !
An
et
82 = ^ = -^
A12
Z/z
et
Cîf?) = Zo ^
la solution générale du système s'écrit :
<2i (t) = /o ? + A|2 COSlïV + 02)
—
Ai2—C0s{fl2t + 02)
L'I
Exemple : avec C = 0,1 jjlF , Li = L2 = 50 mH , on trouve : f2 =£12/(Itt) «3,2 kHz .
b) Circuits couplés par inductance mutuelle
Considérons deux circuits oscillants identiques, couplés par induction (Fig. 11.5). On désigne par
M le coefficient algébrique d'inductance mutuelle (cf. Electromagnéîisme). La loi des mailles donne,
en désignant par L et C les valeurs communes des inductances et des capacités des circuits oscillants :
d(Zi| + M2)
Qi
df
d(L/2 + MQ)
62 _
dt
C ~
—
C
n
Comme fi = dQxj dt et fi = d^fi/dt, il en résulte, en divisant par L et en introduisant
«5= l/(LC) :
d2ôi , Md2e2 ,
+
^
2^ _n
0
h
L
i^
+ Uoei
'
-
C
d2e2 , M^Qi
.
et
+
^
L
u
<0
<0
U
,
2_A
+Woe2
L^
-0
*2
U
L,2 C
42
Fig. 11.5.
TJ
O
C
û
(M
1—1
O
(M
©
>CL
O
U
Les modes normaux de vibration se déduisent des deux équations algébriques obtenues en cherchant des solutions de la forme Ci = Ai expfin?) et C2 = A2 expfifir). Il vient :
M
[o)q - fl2) A] - yÙ2 Aj
=0
--a2Al + {ù,l-a2)A2
L
=0
L'équation caractéristique, du deuxième degré en fl2, est donc la suivante :
^1 —
M2
—
+ 6>o — 0
Il en résulte les deux pulsations propres :
col±col [l — (1 — M2/L2)]1/2
1 — M2/L2
364
11. Oscillations couplées
d'où:
Qi —
et
fi 2 =
'1 +M/L
1 — MjL
Lorsque les circuits sont découplés, il ne reste alors plus qu'un seul mode correspondant aux pulsations
propres fii = fi2 = <yo dss deux circuits identiques séparés.
II. 3. — Coordonnées normales
a) Définition
Rappelons l'équation différentielle du deuxième ordre caractéristique d'un oscillateur harmonique
(cf. chapitre 3 et Mécanique) :
+ fig^ = 0
où q désigne la charge du condensateur dans l'oscillateur électrique.
Lorsqu'un système est constitué de deux oscillateurs harmoniques couplés, et plus généralement
de N oscillateurs harmoniques couplés, on peut se demander si, pour faciliter l'étude, il ne serait pas
possible de trouver un ensemble particulier de coordonnées pour lequel le système se comporte comme
deux ou N oscillateurs harmoniques indépendants.
Les coordonnées normales d'un système de N oscillateurs électriques couplés sont les N coordonnées indépendantes {X/} telles que l'énergie du système puisse être mise sous une forme canonique
caractéristique de l'énergie d'un ensemble de N oscillateurs hannoniques indépendants :
Pour un système à deux degrés de liberté, cette énergie s'explicite selon :
c _ 1
""" " 2 l d7
l
+
n2xi+ 1 fdxA2+laV
2n'Xl + 2
dJ + 2
Remarque : Notons que X; n'est pas homogène à une tension, une charge ou une intensité, mais au
produit de la racine carrée d'une énergie par une durée.
b) Système symétrique à deux degrés de liberté
Pour le système symétrique étudié précédemment, la recherche des coordonnées normales est particulièrement simple, car les charges Qi et Q2 n'évoluent pas de façon harmonique :
Qi (t) = ^ [cosÇfV) + cos(fi201
eI
fMO = Y' [cos(^|r)
_
cos(fV)]
On voit que leur somme et leur différence, elles, oscillent harmoniquement :
Q+(t) = Qi +Q2 = Qocos(nit)
et
Q-(t) = Qi - & = Qo cosffLr)
365
Oscillations couplées
Pour trouver de façon précise les coordonnées normales, exprimons la forme canonique caractéristique de l'énergie électromagnétique en fonction de Q+ et
• Puisque 0\ = (<2+ -|- Q-)/2 et
Qi = {Q+ -Q-)/2,tt vient:
.
.
, <■
..cc
a
avec
2
2
o ~ ^
1ÔI +, ^
125 + 21(0,-22)
£e
C,2
" ot
4C
Qi
4C
+ .2-1
2
2C^
V dr
En introduisant les carrés des pulsations propres fij = ojI et
f —
W'JH
+
4 V
= a^(l + 2C/C12), on obtient :
d(
en fonction des coordonnées normales Xi et X2 :
/L\
1/2
Xl = (2)
// \
e^U)
1/2
/r\
(21+22)
et
X2=(-j
1/2
/r\
e_=
-
1/2
(Gl-e2)
Évidemment, X| et Z2 n'ont pas la dimension d'une charge électrique.
c) Système asymétrique à deux degrés de liberté
Lorsque le système est asymétrique, la recherche des coordonnées normales est considérablement facilitée par l'utilisation du calcul matriciel (cf. annexe 1). Nous avons précédemment montré
que l'équation différentielle d'évolution du système se mettait sous la forme :
[L]^Q] + [c- 'ne] = [0]
En introduisant les matrices ;
m-' =
L1
r
0
^ 1
.o
Lï\
et
et
flVl - [LT'ir-'l
[C
J
- .
-f (L1 C]2)
-{LiCnr1
-ICCnC1
(L2C2) ' + (7.2012)
1
le système différentiel donne :
[2] + [rc][e] = [0]
Recherchons les modes propres en y injectant une solution harmonique :
[Q]=
= [A] exp (jat)
On est conduit à :
rc]-n2[/])W = [0]
avec
[7]=^
°
ce qui s'écrit aussi :
[rdW = n2 [A]
Sous cette dernière forme, les carrés des pulsations propres flj apparaissent comme les valeurs propres
A/ de la matrice [Te] ; les vecteurs colonnes [A] correspondants sont les vecteurs propres [V/] associés
(cf. annexe 1 ).
11. Oscillations couplées
366
On trouve ces derniers en remplaçant fi par fi, dans le système d'équations algébriques. La
solution générale du système s'exprime alors sous la forme d'une combinaison linéaire des vecteurs
propres. On a donc en notation réelle, puisque [L,] exp (±/fir) est solution (cf. chapitre 3) :
[Q\ (r) = [V, ] cos (Lti r + (W + [^2] cos (fLr -h ^2)
[Vi] = A,, ^
et
[V2] = A12 ^
Effectuons le changement de base qui permet de rendre la matrice [Fc] diagonale. Pour cela, on
construit la matrice de passage [P] en disposant en colonnes des vecteurs proportionnels aux vecteurs propres [V,-]. On obtient :
i]
et
[D]
=[1
ni
puisque les éléments diagonaux de [D] sont les valeurs propres de [Fc].
La matrice diagonale [D] et la matrice de couplage [Fc] sont reliées par l'équation
[Dl = [P]~1 [Fc] [P] • Écrivons le système d'équations dans cette nouvelle base. En notant [X] le vecteur colonne des nouvelles coordonnées, on a :
[Te] = M [O] [py1
[Q] = IP] [*]
et
[P] [X]
+
[/>] [D] [P] ■ I [/>] [XJ
=
0
La multiplication matricielle à gauche par [P]"1 conduit à :
[X] + [D][X] = [0]
ce qui donne, en explicitant :
+ £1% = 0
et
+ a?X2 = 0
Dans la nouvelle base, les équations sont découplées, c'est-à-dire indépendantes l'une de l'autre. On retrouve l'énergie électromagnétique en multipliant respectivement ces équations par dX, / d r et 6X2/ ét
et en les ajoutant :
XiX] + OjXiX, + X2X2 + £11X2X2 = 0
d £eiu
„
— =0
avec
^
c
Sem = ^(=i
+
On vérifie ainsi que les nouvelles variables X; sont bien les coordonnées normales du système.
Cette méthode s'applique aussi à des systèmes comportant N oscillateurs harmoniques. La dimension de la matrice [rc] est alors N x N. L'analyse du problème se résume au calcul des valeurs et des
vecteurs propres d'une matrice. Cet aspect technique est important, car commun à tous les domaines de
la physique linéaire. Le recours à la simulation, et plus exactement à des méthodes informatiques de diagonalisation de matrices, est souvent incontournable si les oscillateurs couplés ne sont pas identiques et
en nombre supérieur à deux.
367
Oscillations couplées
Exemple : la figure ll.l représente des circuits couplés, dont les valeurs sont les suivantes :
C] = 2 jxF, C? = 3 jjlF, C12 = 2 jxF, L] = 250 mH, L2 = 500 mH. En utilisant comme unité
de capacité le jiF et d'inductance le henry, on trouve :
[rc] =
2+2
-1
-2
2/3 + 1
4
-1
-2
5/3
ce qui donne après calcul des valeurs propres et vecteurs propres :
A| = flj = 1
A2 = Vl\ = —
[/>]-' =
[9/11
[Fi] =
-6/11
-1/3
[P] =
-3/2
— yjQï ~ Jï®2
et
1
-1/3
1
3/2
~ ÏT+ TT^2
III. — MODES DE COUPLAGE
III. 1. — Différents types de couplage
a) Couplage capacitif
Dans l'exemple des circuits couplés du montage introductif (Fig. 11.1) ou du montage simplifié de
la figure 11.4, le couplage était assuré par un condensateur. On dit que le couplage est de type capacitif.
Rappelons que dans ce cas, les équations associées étaient les suivantes :
d2Ôi
^
, Qx-Qi
+
n
= Q
.
et
d2 Qi , Ô2-Ô1
^
+
A
=0
-^
soit, matriciellement :
^[ô] + [Telle] = 0
avec
[Te] =
"/J-/"
b) Couplage inductif
Dans un couplage inductif ou magnétique, les deux oscillateurs interagissent par l'intermédiaire
d'un transformateur sans noyau de fer; c'est le circuit de la figure 11.5. Les équations relatives à ces
circuits s'écrivent :
d2 Q\
d2 Qo
LC—^-MC—^
+ Ôi =0
d/2
d/2
et
d2 Q-y
d2 Oi
LC—^
- MC-^-+
02 = 0
dt2
dr2
soit, matriciellement :
2
r
r
[ d^2 lô] + [Ô] = 0
avec
[FJ =
LC
-MC
-MC
LC
Notons que cette dernière équation peut être mise sous une forme similaire à celle relative au couplage
capacitif, en la multipliant matriciellement à gauche par la matrice inverse pT^]-1 :
[ci + inr 1[q] = o
11. Oscillations couplées
368
c) Couplage résistif
Sur la figure 11.6, on a représenté un système de deux oscillateurs liés par un couplage résistif. Les
équations différentielles se mettent sous la forme suivante (cf. Exercices) :
2
^[e] + [rR]^[e] + «5[Q] = o
La dérivée d'ordre un, supplémentaire, est à l'origine d'un facteur d'amortissement dans la solution.
UL,\
ML,2
wsm
KXJuO—T4i
C
UR
R
UC,2
C
42
i\
->
■
h
Fig. 11.6.
III. 2. — Facteur de couplage
L'influence du couplage entre deux oscillateurs est maximale lorsque les deux oscillateurs en interaction sont identiques. Ainsi, pour deux circuits couplés par inductance mutuelle, le couplage est
maximal pour un système symétrique. On a vu que les pulsations propres s'écrivaient :
fli =
620
(1 +M/L)1/2
et
Ho =
620
, , , rr
1 — M/L)1/2
avec
Ù)f)0 =
f 1 '
—
\LC
1/2
Le couplage sépare les pulsations Cl\ et 112 , de part et d'autre de 62o .
On appelle/«cfôwr de couplage de deux oscillateurs harmoniques, de même pulsation propre, le
nombre sans dimension x A0' permet d'exprimer les pulsations fii et fL sous la forme symétrique
suivante :
O] =n0{l —/y)1/2
Si x
est
et
02 = no{l + A/)l/2
avec
Oo = 6^0 (^1 -
j
et
M
X=T
voisin de 0 ( M -C L ), le couplage est lâche ; si x est voisin de 1 ( M ss L ), il est serré.
III. 3. — Analogie mécanique
Il existe de fortes ressemblances entre les circuits électriques et les systèmes mécaniques (cf. Mécanique). Ainsi, les systèmes mécaniques à couplage élastique, par inertie et par frottement, sont respectivement analogues à des circuits à couplage capacitif, indue f if et résistif.
IV. — SYSTEME DE DEUX CIRCUITS COUPLES EN REGIME FORCE
Insérons dans un circuit composé de deux oscillateurs électriques couplés, tel que celui de la figure 11.7, une source de tension sinusoïdale u(t) = umcos{cot), et intéressons-nous au régime établi, lorsque l'influence des conditions initiales a disparu (cf. chapitre 4). Il est alors naturel de choisir
un état initial de repos où les condensateurs sont déchargés et les courants nuls : les charges d'équilibre sont alors nulles, et les écarts de charge introduits en régime libre s'identifient aux charges portées
par les condensateurs en régime forcé.
Oscillations couplées
369
Ur,\
Ul,
UL2
UrO.
L2
n
^-y®S5555v
ri
u
«C.l
c.
Uc
C12!
ne,2
C2
^2
12
Uer^j
Fig. 11.7.
IV. 1. — Équations différentielles
Les équations différentielles s'établissent aisément; il suffit d'ajouter aux équations de base initiales un second membre à la première équation. Il vient, après simplification :
62qi
1 dq]
i
2
dt
T] df
Cl2y
d ^2 , 1 dqz
+ ^2
d t2
T2 dt
2 Cl
) ^2 - Mi—qi
C12
1
Um
2
- *>l 7^^2
C12
U
=
0
où coi = (LjCi) 'Z2 et 0)2 = (C2C2) l//2 sont les pulsations propres des deux circuits avant couplage.
y*
Evidemment, les termes d'amortissement dus aux résistances sont proportionnels aux dérivées premières
de q\ el q2 •
IV. 2. — Amplitudes complexes
Comme pour les systèmes forcés à un seul degré de liberté, cherchons des solutions complexes de
la forme :
qft) =A\ expO>f)
et
q2{t) = A2 exp(jù)t)
Al et A2 désignant des amplitudes complexes de charges électriques.
■a
o
c
u
û
fM
1—1
O
CN!
(5)
4—J
sz 1
.5
>û.
o
u
a) Système non amorti
Négligeons les amortissements en faisant r| = T2 = oc dans les équations différentielles. Leur
suppression ne change rien à l'analyse; elle s'exprime simplement par une amplitude des oscillations
qui peut atteindre une valeur infinie. Les équations se transforment en équations algébriques :
222
— CO + W| +
——
C12
A, — OJ 1
C,
A-, =
—£12
— —
7—
C 12
L\
et
Ci
.2 ^2
— CO-,
—
A, = 0
<JJ2 ~—A, + j —O)" + £t»2 +
—— 1 0.2
C 12
C\2
On en tire :
(—û)2 + û>2 + W2C2/C12) UmjL\
à[
-co1 +
+ oj\C[/Cn) [—or- + co\ + cû\C2/C{2) - o)\co\C\C2lC\2
et ;
A2 —
{ooiCi/Cn) um/L\
2
2
2
[—OJÎ + w + Û> C|/C]2) [—co2 + «y2 + ^2^2/^-12)
—
o)^tt)2C1C2/C212.
11. Oscillations couplées
370
Les amplitudes complexes Ax et A2 sont réelles et deviennent infinies lorsque la pulsation d'excitation o) est égale à l'une des deux pulsations propres Li| et fL solutions de :
<y2 + o)\ +• (y2C|/C12) (—-f- 0)2 + (tijCilC12) — m]to^Ci C2/Cj2
=
0
C'est le phénomène de résonance pour un système à deux degrés de liberté (cf. chapitre 3).
Le rapport des amplitudes complexes des oscillations est évidemment réel et du signe de :
—2 _
\
— D\ù)\ —
t
Ai
—ûj- -p (Dj +
llm/L]
r
C\2
Comme le rapport des amplitudes complexes des oscillations est du signe du dénominateur X(tu),
introduisons ce dernier dans l'équation aux valeurs propres du système. Il vient :
X (x — toi - à>27r~ A- o)] A\
~ C12
C12
2 2C\C2_
- ^>1^2 r2 —
12
0
Étudions le signe des solutions réelles X{ = X{ùi) et X2 = X{Ù2) de cette équation. Puisque le
produit des racines est négatif (X1Z2 — —
Ci/C^ ), l'un des modes correspond à des oscillations
en phase des deux circuits et l'autre à des oscillations en opposition de phase. Le premier est le mode
symétrique, le second le mode anti-symétrique.
h) Système amorti
La prise en compte de l'amortissement, c'est à dire des phénomènes dissipatifs, modifie le système
d'équations algébriques selon :
.Ù)C]Ù)\
2
-CO^+J
-|- £t). + Ojl
0)\C2
Ai +
,0)020-,
+
<y2 +i1
t2
A - ûq2 —-A2
A
Al
L12
-,
2 £-2
+ 0)2—- A2
^12
=
0
d'où:
(—«y2 + ioCioy^j^2 + o)\ -(- o)\C2lC\2) umjL\
Ai =
{—eu2 4"jo)C\eu2/t 1 + tu2 + £u]Ci/C]2){—ru2 -\-jù)C20)\l72 + eu2 + oy^CijC12) — 1/(LiL2C22)
coq OJj C1C2 W/m j 0\2
A2 —
2
2
2
2
eu + jeuC)w /r 1 -f eu + £u Ci/C]2) (—eu2 A- jejC^oj^jT) + eu^ + £«^2/012) — l/LiZ^C^)
Les amplitudes ne divergent plus en Hi et 0-2 : elles restent finies. La dissipation d'énergie, toujours
présente même faiblement dans le système, a donc pour effet d'adoucir les pics de résonance. La représentation graphique de l'amplitude |Afj des oscillations conduit à deux situations :
i) Si le couplage n'est pas trop lâche, la courbe présente deux raaxima et un minimum (Fig. 11.8a).
Les maxima se situent au voisinage des pulsations propres fi] et 02 . Le minimum, appelé antirésonance, se produit pour <y « Oq .
H) Au fur et à mesure que l'on diminue le couplage, les maxima se rapprochent et finissent par se
confondre (Fig. II.8b). Cette situation définit le couplage lâche. L'amplitude des oscillations dans le
circuit 2 s'affaiblit avec la diminution du couplage (Fig. 11.8c).
371
Oscillations couplées
IA.
\à.2
fi 1
(0
Ho fi2
il
a)
On
b)
C)
FIG. 11.8.
Exemple : en utilisant des bobines identiques d'inductances L\ = L2 = 50 mH, de résistances
ri = r2 = 8 O, des condensateurs de capacités C\ = C2 = 1 p.F et C12 = 0,5 jxF, on trouve
expérimentalement :
f —
27r
~ 770 Hz
fi —
2it
«1,7 kHz
et /0 = ^ « 1, 3 kHz
2TT
V. — COUPLAGE ENTRE PLUSIEURS OSCILLATEURS
V. 1. — Équations différentielles du système
Le système représenté sur la figure 11.9 est formé d'une chaîne de N oscillateurs linéaires identiques, couplés par capacité ; les valeurs communes des inductances et des capacités sont respectivement
L et C.
ln+]
hl-l
J
IN
\
L
Qn— I
.qN+\
C
Hn
Fig. 11.9.
Appliquons les lois de Kirchhoff aux circuits n et n + 1 , en introduisant les intensités in des courants
dans les bobines. Si l'on désigne par qn la charge de l'armature supérieure du condensateur n, on
trouve :
=
. d
"d7
r d iu — 1
^r,
L
qn— i
qn
^
^+c=0
et
r d
i
i
qn
^r-c
+
qn— i
^ =
0
d'où, par différence de ces deux dernières équations :
r
E
d(L
L—i)
^
^Qn
C
^«+i
C
Qn— i _ a
C~
.
d q2u
dr
|
2/
o(^"
\
0
2/
\
n
^
372
11. Oscillations couplées
en divisant par L et en introduisant la pulsation propre
= {LC)
teurs. Cette équation n'est valable évidemment que pour n tel que :
/? — 1 ^ I
et
n-\- \ ^ N
soit
]/f2
, commune à tous les oscilla-
2^n ^N— ]
Une manière de détenniner les modes propres de vibration consisterait à chercher, comme pour
deux oscillateurs couplés, des solutions de la forme exç(jilt) et à résoudre le système des N équations
algébriques qui en résulte. Cependant la résolution de ce système d'équations différentielles n'est pas
aisée, car la méthode s'avère vite difficile à mettre en œuvre, dès que le nombre d'oscillateurs dépasse
quelques unités. Aussi est-il judicieux de traiter d'abord le cas d'un nombre infini d'oscillateurs, ce qui
permet de retrouver une équation différentielle caractéristique dont la solution est bien connue.
V. 2. — Extension au cas continu : N infini
Le circuit précédent, dit à constantes de capacité et d'inductance localisées, correspond à une valeur
finie de N.
Lorsque N est infini, le système se comporte comme un milieu continu avec ces constantes réparties. Les lignes coaxiales sont un exemple de système électrique à constantes réparties. Introduisons
alors la fonction q{x, r) qui remplace qH , et la très faible distance cl qui sépare deux condensateurs successifs ; il vient :
Cjn
g»+i - g,, _ 1" dc/Çx, t)
ci
dx
dq(x, t)
Q>\ — \
ce qui donne, en remplaçant d2^„/dr2 par d2q(x,r)/dt2 :
d2q(xj)
— coqcI
dq{x: t)
9q{x, r)
dx
dx
Comme :
1 | ïdqjxo)
cl |
dx
d2gC, t)
dqjx, t)
dx
dx2
on obtient
d2q{x,t)
d2q(x: t)
-"o
;
-Q
2
^it
d2q{Xi t)
dx2
1 d2q[xj)
v2
dt2
où v = o)cl a la dimension d'une vitesse. Cette équation différentielle est caractéristique de la propagation d'une, onde électromagnétique le long d'une ligne. On montre que la solution a pour expression
(cf. Optique ou Electromagnéîisme) :
q+ et
étant deux fonctions quelconques des variables t — x/v et r-\-x/v.
Lorsque les fonctions q+ et q- sont sinusoïdales, on peut les mettre sous la fonne complexe
suivante :
q± = A± exp jfl
± —^ = A± exp(/T)r) exp{±jkx)
où k = fl/v, homogène à l'inverse d'une longueur, est le nombre d'onde.
Oscillations couplées
373
La vitesse v s'exprime simplement en fonction de la capacité et de Tinductance linéiques de la
ligne d'oscillateurs. En effet, si Q et L/ désignent ces grandeurs, on a :
1/2
1/2
1
WQ =
d'où
UQd2
v = wod =
1
1/2
LiQd2
d=
1
1/2
UQ
V. 3. — Modes propres de vibration d'un ensemble d'oscillateurs identiques
Le résultat précédent suggère de chercher des solutions harmoniques complexes de l'équation différentielle ;
d2 g,,
+
— <?/!-! ) — ^ofe+l — <?") — 0
dt2
qui soient de la forme :
= A expijnO) expf/Ht)
Il vient, en injectant cette dernière expression dans l'équation différentielle :
—fi2 + 2col — 0)1 [exp{—jO) + exp(/^)] = —fi2 + 2iol{l — cos 9) = —fi2 + Ao)\ sin2
=0
Par analogie avec un milieu à constantes réparties, on peut introduire le nombre d'onde k et la distance
d qui sépare deux oscillateurs successifs, en posant 6 = kd .On en déduit la relation suivante entre fi
et k :
fi = 2co.
sin
kd'
La relation fi(Â:), donnant la pulsation propre fi en fonction du nombre d'onde k , est la relation de
dispersion (Fig, 11.10); notons que deux valeurs k et —k correspondent à une seule valeur de fi.
2(oq
kd
— TT
0
77
Fig. 11.10.
La solution générale q se met donc sous la forme :
^
—»
qn{t) = A+ exp(/fi/) exp(—jknd) + A_ exp(/fir) exp(Jknd)
Ce résultat est analogue au cas d'un milieu infini ; il suffit de remplacer le produit nd par une variable
continue x. Comme
= 0 et qN+l = 0, quel que soit t, il vient :
^0(0) = (^-i-+^-) =
0
et
^+l(0) =
A
+exp|-j£(Af-M)d]+4_exp[/£(;V+!)<-;] =0
ce qui implique :
/4+ + A- =0
et
A4. exp[jk{N + 1) <i] -f A_ exp[—+ l)d] = 2jAjr sin[&(iV + 1) d] = 0
374
11. Oscillations couplées
Les valeurs de k et par conséquent celles de fi qui conviennent sont donc respectivement
7T
kp =P
{N+\)d
et
p étant un nombre entier. Finalement, q
fi,; — Imq sin P
■7T
2{N + 1)_
a pour expression, en posant
N
/
\
)
sin
qn{t) = E^
p=i
= 2/A+
ex
PO'apO
Exemple : le couplage de quatre oscillateurs identiques, harmoniques, de fréquence propre 1 kHz,
fait apparaître quatre modes normaux d'oscillation :
/, =
fii
277
620 Hz
fio
/2 = ^~L2kHz
277
/s = ^ ~ 1,6 kHz
277
et /4 = ^ ~ 1,9 kHz
277
Les modes normaux obtenus peuvent ainsi être représentés en fonction du nombre N d'oscillateurs
(Fig. 11.11). Lorsque N devient grand, l'ensemble des modes normaux tend vers un continuum, limite
d'un milieu continu. Des ondes peuvent alors se propager dans le milieu, jusqu'à une pulsation limite,
appelée pulsation de coupure, cûc = Iojq .
i, m/o)o
2 ■■
Vv
Fig. 11.11.
V. 4. — Application à deux oscillateurs identiques
En imposant N = 2 dans les expressions précédentes, on trouve :
=
fil = 2(Uo sin
<^0
e
t
kïi = 2^0 sin
=
ce qui correspond bien aux valeurs trouvées lorsque Cj = C2 = Cji = C. Les solutions sont alors
2
=
Xl^osin
)
ex
PO'npO
Oscillations couplées
375
On voit que, dans le mode 1 :
y/j
£,(/) = Ao—expO'Oif)
et
y/j
q^t) = Aq—expO'^iO
alors que, dans le mode 2 :
W
=
^ expOXV)
et
q2(t) = -A0-y- expO^t)
En passant aux notations réelles et en introduisant go — Aov'/3/2 , on retrouve bien des solutions harmoniques, de pulsations propres O] et
:
q\{t) = qi (0 — flcos(fiir)
et
q\{t) — ~go(r) = ûC0s{fl2t)
CONCLUSION
Rappelons les points importants.
1) Les grandeurs électriques de deux oscillateurs harmoniques couplés n'évoluent pas de façon
harmonique, mais comme la supeiposition de deux oscillations harmoniques. Les charges à considérer
doivent être les écarts de charge par rapport à la situation d'équilibre, si initialement les condensateurs
ne sont pas déchargés.
2) On détermine les deux pulsations propres du système couplé en annulant le déterminant des
coefficients qui apparaissent dans le système d'équations algébriques, issu de la recherche de solutions
harmoniques de la forme expQr'fir).
3) La nature des oscillations suggère de rechercher de nouvelles coordonnées qui évoluent au cours
du temps, selon des lois hannoniques indépendantes qui sont les modes propres de vibration. L'analyse
est facilitée par la recherche des valeurs propres et vecteurs propres d'une matrice.
4) Le nombre de modes propres est égal au nombre de variables d'état du système ; c'est ce que
confirme l'analyse de l'ensemble de N oscillateurs identiques couplés.
5) Lorsque les oscillateurs couplés sont soumis à un régime forcé sinusoïdal, on observe, comme
pour les oscillateurs à un degré de liberté, un phénomène de résonance pour des valeurs de la pulsation
excitatrice voisines des pulsations propres du système.
6) Pour un système de N oscillateurs identiques couplés, les solutions sont de la forme :
■d
q_n{t) = AexpO&O exp(/n/)
o
dans laquelle n est le rang de l'oscillateur, d la distance qui sépare deux oscillateurs successifs et k le
S
(5)
nombre d'onde. La relation de dispersion entre fi et k est alors la suivante :
§
Ù{k) - 2û)o sin
a.
u
(oq étant la pulsation propre de l'un de ces oscillateurs.
11. Oscillations couplées
376
EXERCICES ET PROBLÈMES
Pli- 1. Couplage capacitif
Dans les oscillateurs couplés représentés sur la figure 11.12, les condensateurs de capacités
Ci = C2 = C = 1 jjlF ont été chargés sous les tensions respectives U\ = wc,i(0) = 5 V et
U2 = «c,2(0) = —3 V . Le condensateur, de capacité C12 = 0. 1 pE, est initialement déchargé. L'interrupteur K, à deux positions, ferme le circuit à un instant pris comme origine des temps. Les bobines,
identiques, ont pour inductances L] = L2 — L = 10 mH .
1. Établir les équations du système reliant les charges q] , qz et ^12 des condensateurs du circuit.
2. On prend en compte les résistances des fils des bobinages.
a) Calculer les charges des condensateurs au bout d'une durée infinie.
b) Trouver les tensions finales aux bornes des condensateurs, respectivement wi(oo), «2(00) et
«12(00).
3. Dans la suite, on néglige les résistances du circuit. À quelles équations satisfont les écarts de
charge Q] et Q2 aux charges d'équilibre des condensateurs 1 et 2 ? En déduire les pulsations propres
du circuit, ainsi que les modes normaux d'oscillation.
4. Comment évoluent les charges des condensateurs qi et q2 en fonction de fi| , D2 , C, C\2 ,
Ui et U2 ? On visualise l'évolution de la tension u\(t) sur un oscilloscope. Qu'observe-t-on ? Calculer
la fréquence et l'amplitude des modes.
u
U
Lt\
cj
Ci
M
-nmw
£2
klQ-12
L\
Yi
u
L,2
U
U
C,1
CX2 C2
C12"
11
<?2
r
Cl i ^
L
C2
L UL
<0
o
l
2
K
Fie. 11.12.
FlG. 11.13.
Pli- 2. Couplage inductif
Les deux oscillateurs de la figure 11.13 interagissent par couplage inductif. La source électrique
délivre une tension échelon ue = EY{t). Les condensateurs sont initialement déchargés. Les valeurs
des composants sont C] = 3C2 = 22 nF, L = 150 mH , M = 50 mH et E = 6 V .
1. Écrire les équations du circuit donnant l'évolution des charges q\ et ^2 des condensateurs, de
capacités respectives C{ et Ci.
2. Calculer les pulsations propres du système couplé, ainsi que les modes normaux d'oscillation.
3. Comment évoluent les courants i\ et i2 ?
4. Étudier l'évolution de la tension
et calculer l'amplitude des deux modes correspondants.
377
Oscillations couplées
Pli- 3. Couplage résistif
Dans le circuit représenté sur la figure 11.14, l'interrupteur K est fermé, à l'instant initial. Les
condensateurs, de capacité C] et C2, portent à cet instant les charges respectives q\ (0) = qo et
42(0) =0.
s w
1. Ecrire les équations du circuit donnant révolution des charges q\ et qi des condensateurs.
2. Rechercher, à l'aide des coordonnées normales, les modes propres du circuit. On donne
C\ = C2 = C = 10 jjlF , L = 0,8 H, i? = 30 fi.
3. Déterminer l'amplitude des modes propres de vibration pour les tensions aux bornes des condensateurs, sachant qu'initialement, le condensateur de capacité Ci a été chargé sous la tension E = 20 W .
Qu'observe-t-on ?
4. Que deviennent les modes propres quand on augmente la valeur de la résistance de couplage ?
r-nmmL
C2
C2
Cl
L\
<3
7-2
12
FiG. 11.14.
FIG. 11.15.
Pli- 4. Résonance de deux circuits couplés
On étudie la résonance dans le circuit de la figure 11.13 dont la source électrique délivre une tension
sinusoïdale ue = um cos((y?).
'm
1. Ecrire, en régime établi, les équations du circuit donnant l'évolution des charges q\ et ^2 des
condensateurs.
2. Calculer les pulsations de résonance et d'anti-résonance des tensions
et 112 {t) aux bornes
des condensateurs du circuit, pour L = 0,3 H , M = 90 mH et Ci = IOC2 = 220 nF.
3. Tracer l'allure du graphe représentant les rapports u\fum et 112 j11 m en fonction de (ù .
Pli- 5. Recherche de pulsations propres
Calculer les modes normaux de vibration du circuit de la figure 11.15, sachant que C2 = 40 nF,
Ci = 10 nF et L, = 5L2 = 150 mH.
Pli- 6. Recherche de pulsations propres par la méthode matricielle
On souhaite déterminer les modes propres des oscillateurs couplés de la figure 11.16.
1. Écrire les équations du circuit sous forme matricielle, en introduisant la matrice de couplage
[rc] des courants de maille. On introduira les pulsations coh = 1 /(QL/).
2. Déterminer les valeurs propres de la matrice de couplage pour ù)\\ = co\2 = ^23 = o)q ,
CO22 = 2ûJq et W32 = 3&)q . En déduire les fréquences propres du circuit, sachant que fo = 3,2 kHz.
11. Oscillations couplées
378
rcmmu
Li
Ci!
Li
C2
C3
FIG. 11.16.
Pli- 7. Mesure du facteur de couplage
1. Afin de déterminer l'inductance propre L d'une bobine, on associe en série cette dernière avec
un résistor, de résistance r = 10 O. L'ensemble est alimenté par un générateur d'impédance interne
purement résistive, de valeur r, = 50 fi, qui délivre une tension stationnaire de 5 V. Une mesure
préalable à l'ohmmètre a permis de déterminer la résistance r/, — 5 fi des fils du bobinage.
a) Déterminer, en fonction de L et de résistances que l'on précisera, la constante de temps du
circuit.
b) Aux bornes du résistor, une durée de montée de la tension est Tm = 8,5 ms . Trouver l'inductance L de la bobine.
2. On souhaite mesurer le facteur de couplage x —
de deux bobines identiques à la précédente, M étant l'inductance mutuelle des deux bobines. On réalise pour cela le circuit de la figure 11.17.
Le générateur délivre la tension d'entrée ue = um cos(W).
a) Établir l'expression de la fonction de transfert H(jco) = ip/ip et calculer le facteur d'amplification en tension du montage.
b) A quelle condition peut-on négliger la résistance des fils du bobinage dans l'expression de la
fonction de transfert ?
c) À la fréquence / = 5 kHz le gain en tension est 0,17 . Calculer ^ et M.
M
f / \\
Y T
i\
H
i
T
\
C2
n.
FIG. 11.17.
Fig. 11.18.
Pli- 8. Circuits couplés dissipatifs en régime forcé
Le circuit de la figure 11.18, pour lequel L = 10 mH , M = 6 mH et R = 20 fi , est alimenté par
une tension sinusoïdale ue = iimcos{cot).
1. Les condensateurs sont différents : C| = 2,2 jxF et C2 = 1 pJF.
a) Établir les équations auxquelles satisfont les charges qi et qi des condensateurs.
b) Déterminer les amplitudes complexes A, et A2 des oscillations. Calculer les pulsations propres
de résonance flj et fi2 en l'absence de dissipation d'énergie.
c) Tracer l'allure des courbes donnant l'amplitude des tensions aux bornes des condensateurs,
lorsque les résistances des circuits restent faibles mais que la dissipation n'est pas négligeable.
379
Oscillations couplées
2. Les condensateurs sont identiques ; Ci = C2 = C = 1 jxF.
a) Établir l'expression de la fonction de transfert
mètres sans dimension :
coM
et Q" =
Q' =
R
H{j(o) = uJlLe '
en
faisant apparaître les para-
1 /
1
- [ Lco - —R \
COJ
b) Exprimer le facteur d'amplification en tension An .
c) Calculer la pulsation propre ùjq et le facteur de qualité Q = Lcoq/R de. chaque circuit.
d) Effectuer un développement limité au premier ordre du gain autour de coq . On introduira l'écart
spectral relatif : rj = {co — coq)Iù)q <C 1 .
e) Calculer la valeur de M qui pennet de réaliser un filtre dont le gain varie peu dans la bande
passante du circuit.
Pli- 9. Analogie mécanique Cwëg)
1. Etablir les équations différentielles auxquelles satisfont les positions des masselottes de la figure 11.19a, assimilées à des points matériels repérées à partir de leur position de repos.
2. Etablir l'analogie entre les grandeurs électriques et mécaniques.
3. Trouver un système mécanique analogue au circuit de la figure 11.19b.
§
I
72
A\{m\)
KT
L\
Aiinn)
C,
C2
K[2 1
>1
' V2 •
1—
■ v, '
Kl
• Li
R
b)
a)
Fig. 11.19.
Pli- 10. Chaîne de N oscillateurs identiques
On considère une chaîne de N oscillateurs électriques identiques couplés (Fig. 11.9).
1. Établir le système d'équations différentielles auquel satisfont les charges qn des condensateurs.
2. Pour toute maille non située aux extrémités du circuit, rechercher des solutions de la forme
q^{t) = A+ exp(J6n) exp(/fi?) + /!_ exp(—j0n) exp(j0.t), Expliciter la solution générale obtenue.
3. Calculer les fréquences propres de cinq oscillateurs identiques, de capacité C = 50 nF et d'inductance L = 200 mFf.
12
Effets non linéaires en électronique
Jusqu'à présent, nous n'avons étudié que des systèmes linéaires, lesquels jouent un rôle essentiel,
car très souvent, dans le voisinage d'un point de fonctionnement d'un système complexe, on peut choisir
de nouvelles variables d'entrée et de sortie, de telle sorte que ce dernier ait un comportement linéaire.
Sur le plan technique, les méthodes d'analyse de ces systèmes appartiennent au vaste domaine d'une
physique qualifiée de « linéaire ». Les résultats sont en général assez simples.
Les effets non linéaires traduisent un écart au comportement linéaire d'un système. Parfois non
souhaités, quelque fois recherchés, ils jouent, en électronique, un rôle important, notamment dans la
réalisation de systèmes oscillants.
L'étude des systèmes non linéaires étant techniquement plus difficile que celle des systèmes linéaires, on a souvent recours à l'informatique pour résoudre les équations qui se posent. On constate
alors que certains de ces systèmes, bien que déterministes, ne sont pas prédictibles, d'où leur intérêt scientifique. Ils font actuellement l'objet de recherches très actives dans les différents domaines de la
physique, de la chimie, de la biologie, car ils ouvrent la voie à l'analyse de phénomènes complexes, auparavant incompréhensibles.
I. _ SYSTEMES NON LINEAIRES
1.1. — Rappels sur la linéarité et non linéarité
a) Relations linéaires
La relation s{î) = c)|e(V)] entre deux grandeurs physiques e{t) et s{t) où S désigne un opérateur,
est linéaire, si on a, Ai et A2 étant deux constantes indépendantes des grandeurs e et ^ considérées
(cf. chapitre 6) :
«S[Aicj -f A2C2] = Ai^i -f A2.S2
où
51 = «Sfci]
et
52 = »S[c2]
Cette relation s'exprime aussi à l'aide de l'équation différentielle linéaire suivante ;
dl']e
d*-' 5
ak
d7
+ ak ]
~ dr^"
+
+ a(>
~ ^ d7
+ bl l
~
cTF1"
+
"■
+ boe
^
dans laquelle les coefficients tels que
et bi sont indépendants de s{[) et e{t). Si l'un au moins
de ces coefficients dépend du temps, la relation est dite paramétrique. Le plus grand des nombres k
ou / est/'onire
/« re/cùfon. La connaissance des k conditions initiales sur s{t) permet de résoudre
complètement l'équation s(t) = <S'|e(r)].
Effets non linéaires
381
Montrons que la propriété générale de linéarité est satisfaite par la forme précédente, précisément
que toute combinaison linéaire A|ei(/) +
, des signaux d'entrée e\{T) et ^(t), admet comme
solution la même combinaison linéaire A].vi(/) +
> des signaux de sortie s\{t) et S2(t) correspondants :
dk
d^i
at
+ at
1
, dl e\
5]
1
dl
1
e\
a
-
+ -+ osl{t)-bl — +bl.1- —
+ ... -bèo eiff)
et :
dk S2
ak
'dff
d^"1 52
+ ak
{
~
1 +
dT^
d/
d 62
■"
+ ao S2
hl
^ ~
r+ hl
~dt
l
1
62
171- +
+ ho e2
~ "d?
^
donnent, en multipliant la première équation par A] , la seconde par A2 et en ajoutant :
ak
dk s
dtk
dk-ls
dl e
dl-le
^-i dt
. ^_i
«0 s{t) — bj
bi- d{l_ï
—*
k-\ + ••■ +—vv
- —j
dfi + —.
a
-
bo e{r)
avec :
e(t) = Xiei{t) + A2€2(/)
et
s{t) = Aj.v, {t) + A252O)
Exemples :
i) Caractéristique d'un dipôle ohmique (Fig. 12.1a et chapitre 1) : i = u/R .
ii) Montage suiveur à amplificateur opérationnel (Fig. 12.1b et chapitre 8) :
dus
tq—
h us = Aqg
dr
avec
e — ue — iis
iii) Couplage inductif de deux oscillateurs LC identiques (Fig. 12.1c et chapitre 11) :
d
2fô]
+ [r][ô] = o
_
D>
dr
M
I \
y r
"k S
1/R
C
7777
a)
b)
L
o
o <Z)
o
r i_
12
L
C
Qi
C)
FIG. 12.1.
b) Relations affines
La relation entre e{t) et s{î) est affine si elle se met sous la forme suivante
s(t) = K e{t) + 50
K et 5o étant des constantes indépendantes du temps. Évidemment 5o est nécessairement non nul,
sinon la relation serait linéaire. En revanche, K peut être éventuellement nulle.
382
12. Effets non linéaires en électronique
Notons qu'une relation affine n'est pas linéaire puisqu'elle ne vérifie pas les propriétés de linéarité.
L'importance de ce type de relation est néanmoins considérable. En effet :
i) un système constitué de dipôles de caractéristiques affines et de sources idéales est décrit par un
ensemble d'équations linéaires reliant les courants dans les branches du circuit aux sources, conformément aux lois de Kirchhoff (cf. chapitres 1 et 5) ; le système ainsi constitué est alors linéaire.
ii) on peut décomposer une caractéristique de dipôle non linéaire en un ensemble de segments s'exprimant chacun par une relation affine. Cette méthode, mise à profit dans l'idéalisation des caractéristiques de dipôles, par exemple des diodes (cf. chapitres 1 et 7), est aussi utilisée dans les logiciels de
simulation des circuits. L'informatique permet en effet la gestion de nombreux segments et ainsi d'approcher les caractéristiques réelles.
Exemples :
i) Source de tension stabilisée usuelle (Fig 12.2a) :
,9 = f/s = 30 V
d'où
K=0
et
xq = 30 V
ii) Cellule photoélectrique de marque SOLEM au voisinage de sa tension à vide (Fig 12.2b) ; en fonction
de l'intensité I du courant, la tension de sortie a pour expression :
s — Us — —l 200/ + 3,2
avec
I=e
d'où
K = —l 200 O
et
.vq = 3,2 V
iii) Source de courant (Fig 12,2c) ; l'intensité du courant débité par la source s'écrit, si / est en ampère
et U en volt :
5 = 7 = 5 — 0,02 C
avec
U=e
>7
d'où
K = —20 mS
et
5o = 5 A
7\
/
i
0
50
Us
o
\
■î0\
Us
U7P
U
^
1
1
FIG. 12.2.
c) Relations non linéaires
Lorsque la relation entre e{t) et 5(/) ne satisfait pas à la propriété de linéarité précédente, elle est
qualifiée de non linéaire, ainsi que les systèmes caractérisés par cette relation.
Une conséquence importante est que le théorème de superposition ainsi que les théorèmes de Thévenin et de Norton, qui lui sont directement liés, ne sont plus valables pour les systèmes non linéaires.
Il s'agit là d'une différence fondamentale qui, comme nous allons le voir, est à l'origine de phénomènes physiques spécifiques, inaccessibles aux systèmes linéaires.
L'analyse des systèmes non linéaires est généralement plus complexe que celle des systèmes linéaires en raison des difficultés techniques dans la résolution des équations qui les régissent.
Exemples :
i) La diode, dont la caractéristique 7(77) est représentée sur la figure 12.3a, est un composant passif non
linéaire (cf. chapitres 1, 2 et 7).
il) Le multiplieur à deux entrées (Fig. 12.3b) est un composant actif qui fournit une tension de sortie proportionnelle au produit de deux tensions d'entrée : us = Km U\U2 , Km étant le coefficient du
multiplieur, évidemment homogène à l'inverse d'une tension.
Effets non linéaires
383
/(mA)
X
u,,o
"e.l
U
u
7777
777/ 7777
a)
b)
Fig. 12.3.
1.2, — Dipôles non linéaires
Un dipôle est non linéaire lorsqu'il n'existe pas de relation linéaire entre la tension u à ses bornes
et l'intensité i du courant qui le traverse. Les exemples de dipôles non linéaires sont nombreux (cf.
chapitres 1 et 7). Sur la figure 12.4, on a représenté les caractéristiques de plusieurs dipôles non linéaires.
a) Diode à vide
La diode à vide fut inventée par l'électricien anglais J. Fleming, à la fin du XIX ^ siècle. C'est un
tube en verre, où règne un vide poussé, dans lequel une cathode métallique chauffée émet des électrons ;
ces derniers, en raison de l'agitation thermique, s'extraient du métal par effet thermoélectronique. Le
courant électronique est recueilli par une anode portée à une tension positive par rapport à la cathode.
Les diodes à vide sont encore utilisées de nos jours, notamment pour redresser les hautes tensions
alternatives (cf. chapitre 2). Notons que l'intensité de saturation îsat dépend de la température Tc de la
cathode (Fig. 12.4a).
b) Triode
Schématiquement, une triode est une diode à vide à laquelle on a ajouté, entre l'anode et la cathode,
une grille. Lorsque la grille est polarisée par une tension positive (
> 0 ), la caractéristique de la triode
présente une région à résistance négative (Fig. 12.4b). Les triodes précédèrent les transistors actuels.
Historiquement, elles équipèrent les premiers amplificateurs électroniques et les premiers oscillateurs
auto-entretenus. De nos jours, elles sont encore utilisées par les radio-amateurs pour l'amplification HF,
en raison de leur faible coût, et occasionnellement dans certains dispositifs de traitement du son, par
exemple ceux destinés à produire certains effets musicaux de distorsion dans les guitares électriques.
c) Diode à jonction
Ces diodes formées par une jonction de semi-conducteurs ont des usages très variés (Fig. 12.4c) :
i) traitement des signaux : suppression d'alternances négatives ou charge de condensateurs sous
tensions alternatives (cf. chapitre 7), etc. ;
ii) détection : détecteur de crêtes (cf. chapitre 4), démodulation d'amplitude (cf. chapitre 16), etc. ;
iii) redressement à basse et haute tension (chapitres 2 et 9).
d) Diode Zener
Comme on l'a déjà vu (cf. chapitre 1), la régulation de tension est la principale utilisation de la
diode Zener dont la caractéristique est rappelée sur la figure 12.4d.
e) Diode Esaki et diode Gnnn
La diode Esaki, du nom de son inventeur le physicien Japonais L. Esaki. fonctionne par effet
tunnel, d'où son autre nom plus répandu de diode à effet tunnel (cf. Ouantique). Sa caractéristique est
représentée sur la figure 12.4e ; elle a été tracée en régime variable à très haute fréquence ( 1 GHz ).
384
12. Effets non linéaires en électronique
La portion de caractéristique à pente négative a été utilisée dans le passé pour réaliser des oscillateurs à résistance négative. De nos jours, elle est remplacée par les résistances négatives que l'on réalise
aisément avec les amplificateurs opérationnels (cf. chapitre 8).
Dans le domaine des hyperfréquences, on utilise une diode de technologie comparable mais plus
rapide, la diode Gunn, du nom de l'ingénieur américain J. Gunn. On trouve ce type de dipôle dans les
détecteurs de mouvement par effet Doppler travaillant à 9,9 GHz .
f) Varistance
Les varistances, qui sont constituées de grains de carbure de silicium ou d'oxydes métalliques, ont
une caractéristique assez bien représentée par la relation suivante (Fig. 12.4f) :
I — kUn
avec
2 < n < 10
Elles sont généralement utilisées pour protéger les circuits contre les surtensions, par exemple celles
provoquées par la foudre.
g) Lampe à incandescence à filament métallique
La résistance électrique d'un conducteur métallique augmente avec la température. Lorsque le courant croît dans une lampe à incandescence, la dissipation d'énergie échauffe le filament, généralement
en tungstène, ce qui entraîne un accroissement de la résistance de la lampe (Fig. 12.4g).
h) Tube à gaz
Ces tubes contiennent des gaz rares ou des mélanges de gaz rares avec parfois du dihydrogène. Le
tube s'illumine, dès que la tension à ses bornes atteint une tension de seuil Us (Fig. 12.4h).
La diode à gaz, qui est un tube à vide que l'on a rempli de mercure gazeux, était utilisée pour
redresser des tensions triphasées (cf. annexe 2). Son avantage réside dans sa capacité à tolérer de fortes
intensités de courant, de l'ordre de 1 kA .
Les tubes néons, communément appelés « néons », produisent une lumière de couleur rouge caractéristique du néon ; ils ne sont plus guère utilisés de nos jours que dans des enseignes publicitaires.
Les tubes fluorescents actuels, que l'on appelle parfois « néons » à tort, contiennent des vapeurs de
mercure et non de néon. Ils émettent dans le domaine ultraviolet, mais une fine poudre de terres rares,
qui recouvre l'intérieur du tube, absorbe ce rayonnement et provoque une émission lumineuse dans le
domaine visible. Ces terres rares du bloc / de la classification des éléments chimiques se désexcitent
par fluorescence dans le domaine visible en produisant un spectre riche en raies, ce qui confère au tube
§
o
o
o.
>
u
une couleur blanchâtre ; le spectre obtenu est intense et proche de celui de la lumière solaire naturelle,
ce qui évite la fatigue oculaire.
i) Cellule électrolytique
Dipôle essentiel en électrochimie, la cellule électrolytique joue un rôle déterminant dans l'industrie : fabrication de soude et du dichlore, obtention de métaux purs, plaquage électrolytique, etc.
(Fig. 12.4i).
j) Photodiode
Une photodiode est une jonction pn éclairée (cf. chapitre 1). Ce photodétecteur couramment utilisé, présente deux modes de fonctionnement distincts : le mode photoconducteur du troisième quadrant
caractérisé par une bonne linéarité courant-éclairement et le mode photovoltaïque du quatrième quadrant où la photodiode se comporte en générateur (Fig. 12.4j). Les photodiodes sont utilisées comme
détecteurs dans le domaine visible, ultraviolet et infrarouge, ou comme générateurs, par exemple dans
les panneaux solaires.
385
Effets non linéaires
1* i
Tc,\ > Te,2
J
'sal, 1 "
isai,2- —/
I■
TC 2
'
/~Vo
U
0
\
a) Diode à vide
I.
1
'
Effet
d'avalanche
1
/
U
Uj
b) Triode
c) Diode à jonction
/
S\
1
Eà
;/ Diode
/ / à jonction
*
V
U
d) Diode Zener
e) Diode Esaki
J
f) Varistance
l'
J"
! Diode à vide
0
U
\
j
0
-J
g) Lampe à filament
q
/'
/
'Amorçage
1
Us
"
V
V
E
~
É2 > É\
j) Photodiode
>.
^
(.)n
—
i) Cellule électrolytique
/■
I'
0 ^-/h
1 y
f
|
h) Tube à gaz
/.
Eo
j
j Diode
/ à jonction
Ar
r
Up
/j
_ÉJ
J
É2 > É,
k) Photopile
FlG. 12.4.
u
0
y
\
É,
£2 > £1
1) Phototransistor
12. Effets non linéaires en électronique
386
k) Photopile ou cellule photovoltaïque
Une photopile est une photodiode qui fonctionne en mode photovoltaïque, c'est-à-dire qu'elle est
polarisée en inverse (Fig. 12.4k). Elle se comporte alors comme un générateur électrique qui convertit
l'énergie lumineuse en puissance électrique. Ce composant est utilisé notamment dans les panneaux
solaires et dans certaines calculatrices de poche.
/) Phototransistor
Un phototransistor est un transistor dont la base est éclairée (cf. chapitre 7). Son comportement
étant moins proche de la linéarité dans la relation courant-éclairement que la photodiode, le phototransistor est souvent utilisé en commutateur (Fig. 12.41).
1.3. — Résistance négative à base d'AO
Un dipôle à résistance négative est un dipôle actif qui fournit de la puissance électrique au circuit
au lieu d'en recevoir comme dans un résistor habituel. On le réalise aisément avec un amplificateur
opérationnel (cf. chapitre 8).
?J
rz
X
-înl,-
1
!
;
sb
Unl,7777"
Ri
'«/,+"
l
o,+,r
a)
|
1
|
\ 1
U
>
S/
b)
Fig. 12.5.
Étudions le fonctionnement du dipôle représenté sur la figure 12.5a.
i) En régime linéaire de l'AO, on a :
U — U— — Il-Y- =
R
R -\- R2
us
et
u — us = R\i
ce qui donne ;
R
u = ———iu — R\i)
R -f R2
soit finalement
R
u = —R — i
Ri
La caractéristique du dipôle en régime linéaire est celle d'une résistance négative. Remarquons qu'avec
R] = i?2 , on obtient simplement u = —Ri.
ii) Lorsque l'AO est en régime saturé, la tension de sortie us a pour valeur Usat^+ ou US(lt- .
Faisons l'hypothèse d'une saturation haute, us = Usa!.+ > 0 :
u
+
=
R
p
D usar,+
K , /v2
et
u = u_ = Usa{!+ + Rii
d'où
1
i = -—{u
- Usa[,+,
K|
Effets non linéaires
387
La saturation haute impose une condition supplémentaire u+ — ii- > 0 :
~
=
/? + i?2
Esai,+
^sa!,+
E[i > 0
d où
i <
Le point de transition du passage de l'AO du régime linéaire au régime saturé s'obtient pour ;
L/,+ —
rTTrî i t> N
A|(A+K2/)
^
^fj/,+ — ^7.ra/,+ "L
La tension aux bornes du dipôle, u = f/raf)+
I _
ï0)+
L/,4- — 7î i n ^sai,-\- ^ d
A + A2
R]i, s'annule alors si :
Usat,+
— <A
0
K]
_
Dans l'hypothèse d'une saturation basse, u5 = Usat- < 0, on obtient des résultats similaires :
U
+
=
R
d
, /\2
d Usa!,K -f-
et
U = u- = Usar- + R\i
La saturation basse impose la condition m+ —
R
w+ ~ U— = ^
—
d'où
1
i = —{u
- Usât-)
A]
<0 :
Ri
Usât,- ~ Rlî <0
d OÙ
i>
Usat,-
Le point de transition du passage de l'AO du régime linéaire au régime saturé s'obtient pour :
hil,—
=
Ri
n (r> i n \ Usât,— >0
A ] ^A "T A2 J
et
tl/il,—
=
R
UsaJ^— + R\ijti — = — - —Usnr<— < 0
A "h A?
La tension aux bomes du dipôle, u = Usât,- + Rii, s'annule donc si :
U<nr-
i = *o,~ -
La caractéristique totale du dipôle est tracée sur la figure 12.5b. Le point de discontinuité de la
dérivée première dz/ du introduit une non-linéarité franche.
Exemple : pour le dipôle à résistance négative de la figure 12.5a, les valeurs sont les suivantes :
Usa{>+ = -Usnr- = \5W
i?i=i?2 = 5kn
La transition linéaire non-linéaire s'effectue aux points
Lia.
= —ini _ = ———- = —1 m A
,+
'
10 + 5
et
et
, /„/,+} et
R=l0kn
avec:
u,,! ,+
+ = —uni - = —
15 = 10 V
'
10 + 5
La tension s'annule dans le domaine non linéaire pour :
zo,+ = -k - = - y = -3 mA
12. Effets non linéaires en électronique
388
iii) Stabilité du régime linéaire
L'AO étant doublement rétroactionné, la stabilité du régime de fonctionnement linéaire n'est pas
assurée. Considérons un circuit passif en régime stationnaire comportant un dipôle AB à résistance
négative et une résistance Rc (Pig. 12.6). Les équations de ce circuit s'écrivent :
dwç
r—
h
Qt
.
i ,
= Au{u+ - W_)
Circuit
de charge
1
R
M+ = r——-—Us
K -\- K j
.
A
et
u- =
Rc
, ^ Us
Kc + K i
x
7777"
Ri
Fig. 12.6.
Puisque Ai(
1, l'équation donnant la tension de sortie iis de PAO devient :
d My
r— + {pn - pp)us « 0
avec
p
P
=
R
R
+ Rl
et
pn =
R,
Rc +
où pp et pn sont respectivement le taux de réaction positive et le taux de réaction négative. Le système
n'est stable que si l'argument de l'exponentielle solution de l'équation différentielle précédente est
négatif, c'est-à-dire si p,, > pp .
Lorsque la résistance de charge en régime stationnaire est très faible, pn
0 et pp > p,, œ 0,
l'AO sature systématiquement, le système est instable. C'est le cas par exemple, si la charge est une
cellule LC parallèle. Notons qu'il suffit d'inverser les entrées + et — de l'AO pour stabiliser le
système (Fig. 12.7a). En 12.7b, on a représenté la caractéristique correspondante.
En revanche, pour une résistance de charge très élevée, pn ^ I et pn > pp ; l'AO est donc stable.
C'est le cas lorsque la charge est un circuit LC série.
i i
A""~
- Ei. -
A
0
/ "k"2
u
'f+ J
'Uo,+ U
U
V
b)
a)
FIG. 12.7.
Effets non linéaires
389
Remarque : Le système représenté sur la figure 12.7a est analogue au système précédent dans lequel on
a inversé les entrées de l'AO. On voit que la caractéristique de ce système, qui est donnée
sur la figure 12.7b (cf. Exercices), a une allure « en N » et non plus en « S », comme
précédemment. Ces deux configurations sont associées respectivement aux oscillateurs
RLC parallèle et série (cf. chapitre 14).
II. — TRANSFERT NON LINEAIRE
On sait que l'on peut caractériser un système par sa caractéristique de transfert, c'est-à-dire par la
représentation graphique de la relation entre l'entrée et la sortie qu'il en donne.
Pour un système non linéaire d'ordre zéro, c'est-à-dire insensible aux variations temporelles des
signaux d'entrée ou de sortie, la caractéristique de transfert est une courbe dont l'équation est donnée
par la relation s(t) = é>|e(/)], où <S est une fonction de e, donc indépendante de t et de la forme
de e{t).
II. 1, — Amplificateurs fonctionnels
Un amplificateur/(Mcfi(Mne/ est un système électronique capable de transfonner un signal d'entrée
e(t) en un signal de sortie .9(/) selon une fonction 6" souhaitée :
s(t) = S [e(t)]
L'intérêt majeur de ce type d'amplificateur est de réaliser un transfert non linéaire.
a) Systèmes avec AO
Un moyen de réaliser un amplificateur fonctionnel est, par exemple, d'associer à un dipôle V, un
AO travaillant en régime linéaire. La fonction réalisée est donnée par la caractéristique :
i = S{u)
soit
u=S
1
(/
si la fonction réciproque S 1 est définie. Par exemple, dans le système de la figure 12.8a, la relation
entre l'intensité i du courant dans le dipôle et la tension ue d'entrée, est non linéaire et s'écrit :
i = S{ue) = —R
d'où
iis = —RS{ue)
R
-i
V
i-
Ud
[>oo
id
Ud
47
n
7777
+
a)
Fie. 12.8.
12. Effets non linéaires en électronique
390
De même, pour le système de la figure 12.8b :
*
=
~R
=
S{~us)
et cIonc
li
s
=
S ' (^■)
Ainsi, la réalisation d'un système à transfert non linéaire donné se ramène à la construction d'un dipôle
non linéaire dont la caractéristique détermine la fonction non linéaire désirée.
Les limitations de ce type de montage sont dues, d'une part à l'AO, qui présente une bande passante
de largeur finie, une vitesse maximale de balayage et à la saturation en tension (cf. chapitres 8 et 9),
d'autre part au dipôle qui impose aussi sa bande passante et dont les caractéristiques peuvent varier avec
la température.
b) Amplificateur exponentiel
Un amplificateur exponentiel (cf. chapitre 8) est un système dont le transfert non linéaire est une
fonction exponentielle :
fur\
us — us,o exp
«s o et uefi étant des tensions constantes.
c) Amplificateur logarithmique
Un amplificateur logarithmique (cf. chapitre 8) est un système qui réalise le transfert non linéaire
suivant : us = sq In («Ê./<?o) » où .so et eo sont des tensions constantes.
On peut utiliser ce type d'amplificateur pour constituer un dB-mètre, c'est-à-dire un instrument
capable de fournir une grandeur proportionnelle à 20 lg(Mt,/Mr), ur étant une tension de référence.
Associé à un vobulateur, un amplificateur logarithmique pennet de relever automatiquement la courbe
de gain dans le diagramme de Bode (cf. Exercices).
d) Multiplieur de signaux
Un multiplieur de signaux est un système à deux entrées ^i(/) et
signal proportionnel à leur produit :
s{t) = Klnel{t)e2{t)
qui donne en soitie un
Afin d'analyser soigneusement le rôle d'un multiplieur, appliquons à l'entrée du multiplieur deux tensions sinusoïdales, de fréquences f\ et /2 , auxquelles on a supetposé des composantes stationnaires U[
et U2 :
U] = U] + Um I COS {ù)\t -\- fi\)
et U2 = U2 + llnh2 ^OS {ù)2t + fil)
avec (ù\ = Irrfx et 0)2 — 217/2 ■ La tension de sortie us = Km u \ «2 du système est alors :
us = KmU\U2 + K-mlli nmj cos {o)\t + ^1) + kmU1 um^2cos [(x>2t + fii) + «12
«12 = ~KmumAumacos [(^1 + ù)2)t + fix+ fil] + -KmUnifiUm!2 cos [{wj - ù)2)t A fi] - fil]
On constate que le signal de sortie comporte une composante stationnaire (fréquence nulle) ainsi que
quatre pics de fréquences f\ , fi, f\ + fi et |/i — fi] (Fig. 12.9a). Le signal de soitie contient les
harmoniques du signal d'entrée et deux harmoniques supplémentaires f\ Afi et \f\ —/2I. Le transfert
non linéaire effectué a donc eu pour effet d'enrichir le contenu harmonique du signal.
Effets non linéaires
391
Remarquons que l'annulation en entrée du système de la composante stationnaire U\ (respectivement U2 ) 'à pour effet de supprimer l'harmonique de pulsation ojj (respectivement oq ). En outre,
si les signaux d'entrée n'ont pas de composante stationnaire U\ = Ui = 0 , le signal de sortie se limite aux deux harmoniques de fréquences l/i—/2I et/i-|-/2 (Fig. 12.9b).
Notons que si les tensions d'entrée sont identiques et les composantes stationnaires nulles, le signal
de sortie possède une composante stationnaire, et un signal de fréquence double Iff de celle des entrées.
K
K
Uni. I nm,2
Um. I Uni,2
K.,
\m\'
Um, 1 Um,2
U2
K U2 um. 1
k U[ um.2
/1
f2
f]
h
f] +/2
/
/2-/1
/1 +/2 /
b)
a)
FIG. 12.9.
Les systèmes multiplieurs permettent de moduler l'amplitude d'un signal par un autre. Cette opération joue un rôle important en télétransmission de l'information, détection synchrone etc. (cf. chapitre
16). Notons enfin que les systèmes multiplieurs entrent dans la conception de nombreux appareils de
mesure, tels que phasemètres, wattmètres, voltmètres RMS, etc.
Exemple : multiplieur AD633 à quatre quadrants
Le circuit analogique AD633 (Fig. 12.10) est un circuit intégré multiplieur de tension, à haute
impédance d'entrée ( 10 Mfi ), à bande passante étendue ( 1 MHz ), capable de travailler dans les quatre
quadrants et qu'on alimente en ±15 V. Ce multiplieur à transistors possède quatre entrées différentielles
Xi , X2, Y\ , Y2 et une entrée supplémentaire Z , ce qui permet de réaliser l'opération suivante :
u^K^-X^iY.-¥,)+!
avec
Les entrées acceptent des tensions entre — 10 V et 10 V .
AD633
t>oo
X] 1
X2 2
é)
î
Ua
+
r
X
Y\
6 Z
¥2 4
5 -Un
Fig. 12.10.
392
12. Effets non linéaires en électronique
e) Racineur
Un racineur est un circuit qui réalise un transfert non linéaire proportionnel à la racine carrée d'un
signal d'entrée ue positif (cf. chapitre 9) :
us = Kr uj2
où Kr est un coefficient constant homogène à la racine carrée d'une tension.
Sur la figure 12.11, on a représenté un montage réalisant un racineur à partir d'un AO et du multiplieur AD633. En mettant à la masse du montage les voies X\ et 13 et en reliant les voies Xi et Y\ ,
ce dernier fournit :
= Km (X2 — 0)(0 — F] ) + Z = —Km u2 + ue
puisque
X2 = Y] = us
et
Z = ue
-K X2
+Z
u+
Ua
7777
2R
7777
FIG. 12.11.
Pour nous assurer de la stabilité du montage, nous devons analyser la limitation en bande passante
de l'AO dont la tension de sortie un satisfait à l'équation différentielle (cf. chapitre 8) :
d ua
.
,
-YUa= ^o(«+ - U-)
La tension de saturation de l'AO peut atteindre ±15 V, valeurs des tensions d'alimentation ; le pont
diviseur de tension [R, 2i? ) a pour but de limiter à ±10 V l'entrée du multiplieur, ainsi que l'exigent
les caractéristiques techniques du composant. Par conséquent :
2R
D
K -Y, OD
IK
Puisque
=
Q
3
Ua = adUa
^
=
Q
J
= 0, ua satisfait à l'équation différentielle non linéaire suivante :
+ 11(1 = A
^~Kml^
Finalement, puisque A(<
+
= A
v(~Kmad u2a ± Ue)
soit encore
± ua ± AQKmad u2a = Aç)Ue
1 :
d ua
2
,
r—
\-AQKinadua ^ AQUe
dr
En régime stationnaire établi, sous la tension ue = U, cette équation admet comme solution l'état
d'équilibre suivant :
1/2
U
Un =
Km(xd J
ce qui est bien homogène puisque Km s'exprime en V-l et ad est un facteur sans dimension.
Vérifions sa stabilité par la méthode des perturbations. Plaçons-nous au voisinage de cet état d'équilibre en introduisant l'écart relatif de tension (i{î) -C 1 défini par ua{t) = mq [1 + MO] ' l'équation du
système devient alors :
uqT
± A^Kmad ul [1 ± (i{t)]2 = A^tie
393
Effets non linéaires
En développant le carré et en ne conservant que les termes du premier ordre, il vient, puisque mq
est solution du régime établi :
d /x
t — -t- 2AQKmadUQ fi{t) = 0
aï
On sait que la solution de cette équation différentielle linéaire a pour expression :
MW = M(0)
t
ex
P
avec
-
t. =
2Ao Km (Xd wq
< 1
Initialement écarté de l'état d'équilibre, le système y retourne avec la durée de relaxation rr. L'équilibre
est donc stable.
En régime variable, dans la bande passante du multiplieur et de PAO, le système réalise le transfert
recherché :
1/2
1
ue = Klnadu2a d'où us = adua = (
j
= KrulJ2 avec Kr =
1/2
K,
Exemple : mesure d'une tension efficace
On sait que la valeur efficace d'une tension périodique ue{t), de période T, est donnée par l'expression (cf. chapitre 2) :
' ] fT
-i 1/2
1 /
- J ufftfdt
Uef
Un exemple de montage permettant d'extraire la tension efficace d'un signal périodique est donné sur la
figure 12.12. Le carré de la tension d'entrée est obtenu à l'aide d'un multiplieur usj = Kin u2 . La valeur
moyenne d'une grandeur périodique se réduisant à sa composante stationnaire U, le filtre passe-bas RC
permet de l'extraire (cf. chapitre 6) :
-T
rx
rT
S)
1
K„
u,a=-Jo "s^'=TJo uz dt
Le racineur en bout de chaîne achève le calcul analogique de la tension efficace :
„ _
^ 1/2 _ lff2
u
s — Krus2 — I ^
1/2
1
T
1/2
2
U e(t) dt
= U.ef
KX2
K X"2
X
Uu
C
US.2
Quadrateur
Racmeur
FIG. 12.12.
II. 2. — Écrêteur
Un écrêteur est un système qui limite le domaine de variation d'un signal. En désignant par e(t)
l'entrée, s(t) le signal de sortie écrêté,
et
deux constantes respectivement positive et négative,
on a :
s{t) = e(t) si
< e[t) < s+
s{t) = s+
L'écrêtage est dit symétrique si
si
e(t) > .v+
et
s{t) = s~
= — .v_ , dissymétrique sinon.
si
e{t) < s~
394
12. Effets non linéaires en électronique
Les systèmes écrêteurs jouent un rôle important dans les dispositifs de protection contre les surtensions ; c'est le cas lorsqu'il s'agit de protéger une installation électrique contre la foudre. Les limitations
en tension et en courant des amplificateurs provoquent un écrêtage à rapproche des tensions ou courants
de saturation ; l'écrêtage n'est pas en général désiré car il provoque la déformation du signal de sortie.
a) Écrêtage par saturation en tension
Prenons l'exemple de l'amplificateur de tension à AO représenté sur la figure 12.13 dont la caractéristique de transfert est donnée sur la figure 12.14a.
/?i = 4,7 kO
«2=10ka
X
FIG. 12.13.
Le système est supposé travailler dans sa bande passante et dans des conditions de non-limitation
de la vitesse de balayage. Tant que la tension d'entrée iie évolue entre ue^ et ue!+ , le comportement
du système est linéaire. En désignant par us la tension de sortie et en tenant compte du diviseur de
tension, il vient, PAO étant idéal :
R\ -(- i?2
.
ils - —
ue = AuUt
Ri
avec
.
R\
Rj
Alt = —
^3,1
Ri
Les limites iiet+ et ue- du domaine linéaire en sortie sont atteintes autour des tensions de saturation
haute Usatj+ et basse Usatt- , proches des tensions d'alimentation de PAO :
II* 4. =
'
Usat,+
—
A
.
et
U*e _ =
'
Usa/,: —
—
A
Pour un AO alimenté en ±15 V, on obtient : uei+ = —ue,4. 8 V . En dehors du domaine linéaire,
l'amplificateur sature en tension. En régime sinusoïdal établi, on observe un écrêtage de la tension de
sortie (Fig. 12.14b).
Ue{î),Us{î)
«s
Zone de
destruction
Saturation
haute
Usat,+
/ \
/
'
\
V
/
/
N
\
C',+
Ue
asat.
Usât,—
\
\
Saturation Usatbasse
Zone de
destruction
a)
FIG. 12.14.
/
l
\
Usât—
f
\ /
395
Effets non linéaires
b) Obtention de signaux TTL
Le montage de la figure 12.15a est constitué d'une résistance R et d'une diode Zener connectée dans le circuit secondaire d'un transformateur dont le primaire est alimenté par le secteur; la tension ue(i) délivrée par le secondaire est une sinusoïde d'amplitude uejn = 12 V et de fréquence
/ = 50 Hz . Le rôle de la diode Zener est d'écrêter à f/z = 4,7 V.
Pour ue < 0, la diode Zener est passante, la tension de sortie est environ us = —Ud ~ —0,6 V .
Pour ue > 0, la diode Zener est bloquée ; à ses bornes la tension suit celle du secondaire du transformateur jusqu'à la tension d'avalanche us = —Uz = 4,1 V.
Les signaux obtenus sont proches de signaux carrés 0 — 5 V, assimilables à des signaux TTL
(pour Transistor Transistor Logic) (cf. chapitre 18). Ce montage est simple à réaliser, mais il présente
l'inconvénient de posséder une durée de montée rm assez importante. En mettant ue sous la forme
u
e =
u
e,m sin(2irj7) et en désignant par Tm l'instant de saturation à f/z , il vient (Fig. 12.15b) :
ne(rm) — ue m sin{27r/rw) = Uz
soit
rm = ——-arcsin (—— ] « 1,3 ms
27r/
y ue,w J
R = 4,7 kfi
/ \Ue
' \
Secteur
7^
Us
><o
Uza)
% *
b)
Fig. 12.15.
II. 3. — Comparateurs
Un comparateur de signaux est un système à deux entrées e\ (/) et <?2(0 dont la sortie ne prend
que deux valeurs possibles appelées états, .ç+ et s~ :
s(t) =
si
— e\{t) >0
et
s{t) = s~
si
^(t) — e\{t) < 0
La comparaison est une opération essentielle de mise en forme du signal. Par exemple, le système
de déclenchement d'un oscilloscope, ou trigger, nécessite un système de comparaison du signal à une
tension de référence.
On distingue deux grandes catégories de comparateurs : les comparateurs simples, dont la vocation
est de fournir le signe de la différence des deux signaux d'entrée, et les comparateurs à hystérésis qui
comparent un signal entrant à un signal de référence prélevé à la sortie du système (cf. chapitre 8).
a) Comparateur simple
Dans un comparateur simple la tension de basculement est indépendante de la tension de sortie ; il
permet donc de comparer deux tensions, par exemple une tension donnée à une tension de référence.
On a vu que l'on pouvait réaliser un tel comparateur à l'aide d'un amplificateur opérationnel (cf.
chapitre 8). Il existe des comparateurs intégrés plus performants qu'un AO seul, par exemple le LM339
(Fig. 12.16). Leur durée de basculement est d'environ 0,5 fis, ce qui permet une utilisation à des
fréquences plus élevées.
12. Effets non linéaires en électronique
396
«s,3 ^5,4 -Ua «4,+ «4,- «3,+ "314
13
12
II
10
LM339
1
2
3 4 5
6
7
«5.1 «5,2 f/n «2- «2,+ «1- «I.+
FIG. 12.16.
b) Comparateur à hystérésis ou bistable
Un comparateur simple n'est pas adapté à un signal d'entrée bruité, car plusieurs basculements
successifs non souhaités peuvent se produire, comme le montre la figure 12.17a, aux instants f\ , tj ,
. Le comparateur à hystérésis permet d'éviter cette difficulté (cf. chapitre 8). Lorsqu'un signal bruité,
globalement croissant, dépasse le seuil de déclenchement, il est judicieux d'abaisser ce seuil juste après
le basculement, afin d'éviter que le bruit ne fasse basculer à nouveau le comparateur (Fig. 12.17b). Pour
cela, le signal de comparaison ec doit dépendre de l'état de la sortie s(t) :
${{) = $+
si
^,(r) < ^^(r)]
et
s(t) — S-
si
ea{t) > ec[s{t)]
Le comparateur à hystérésis est aussi appelé bistable en raison de la stabilité des deux états possibles de la sortie.
U\(t)
uAî)
Comparateur à hystérésis
Comparateur simple
«2-—a
y
A/zj «2
*
/_
t
t
\ h
h
h)
a)
Fig. 12.17.
Exemple : Trigger de Schmitt
Le trigger de Schmitt est un comparateur à hystérésis que l'on peut réaliser avec un AO (12.18 et
chapitre 8). La rétroaction réalisée avec les résistances R\ = 500 kfi et /?? = 10 kfl est positive ; F AO
fonctionne donc en commutation, c'est-à-dire en régime saturé.
397
Effets non linéaires
ce
R1=500 kÛ
i?i= 10 kfi
7777 7777
7777
FIG. 12.18.
II. 4, — Conformateurs à diodes
Un conformateur est un système dont la caractéristique de transfert, affine par morceaux, est utilisée pour produire des signaux de forme déterminée, d'où son nom. Sa tension d'entrée triangulaire
(Fig. 12.19a) est issue par exemple d'un oscillateur de relaxation commandé en tension (cf. chapitre 14).
«/ri
us
A
ult) '
El
T/2
A
a.
«0
T
a)
b)
FIG. 12.19.
La figure 12.19b représente la caractéristique de transfert d'un conformateur sinusoïdal destiné
à produire des signaux harmoniques. Si les différents segments de la caractéristique sont convenablement ajustés, les signaux de sortie sont d'autant plus proches de la forme recherchée que le nombre de
segments de la caractéristique de transfert est important.
Les générateurs basse fréquence utilisent des conformateurs sinusoïdaux que l'on préfère aux oscillateurs sinusoïdaux, car ces derniers présentent l'inconvénient de fournir des signaux beaucoup plus difficiles à moduler en fréquence (cf. chapitre 16). Les signaux ainsi créés s'écartent de moins 1 % d'une
sinusoïde dès que la caractéristique comporte au moins sept segments, convenablement ajustés.
Pour obtenir la caractéristique de transfert d'un conformateur, on utilise un ensemble de diodes
convenablement polarisées associées à des générateurs que l'on a représentés sur la figure 12.20 par leur
modèle de Thévenin (cf. chapitre 5) ; les tensions délivrées par les sources sont telles que Zij.+i >
.
Le suiveur à la sortie du système permet de réaliser une adaptation en tension sur le circuit de charge.
Exemple : conformateur sinusoïdal
Le système de la figure 12.20 comporte 2{n -F 1) diodes. Pour des raisons de clarté, sa caractéristique a été tracée sur la figure précédente 12.19 pour n = 1, c'est-à-dire pour un conformateur constitué
de quatre diodes.
12. Effets non linéaires en électronique
398
X
Ro
X
Ri
^);?+1 S
R:
V ■P
^5
Y^+i
Ei
£(1+1
Fig. 12.20.
La parité de la tension à produire réduit l'étude à une demi-période, par exemple dans l'intervalle
0 < t < T/2 . Pendant cette durée, l'alternance de la tension d'entrée ue étant positive, seules les
diodes
du groupe situé à droite du plan de symétrie V peuvent conduire.
Pour 0 < us < E\ , aucune diode ne conduit :
us = ue
de pente
d us
«o
1
d llr.
Le système fonctionne en régime linéaire.
Pour E\ < us < £2 5 seule la diode V\ est passante. Alors :
de
us = (Rq/IR\) (^ +
Pente
ûf| =
d us
(£o//£i)
£1
d llr.
Ro
Ro + R\
Pour E2 < us < Et, , les diodes P| et P2 sont passantes :
Us = iRo//R\//R2)
Pour £/. < ux <
\Kq
+
K]
+
; les diodes P| ,
de
KJ /
Pente
2
{Ro//Rl//R2)
R\//R2
Rc
£0 + ^1//Ri
, Vk sont passantes :
Ei
= {Rof/Ri // ■ ■ • //Rk) ( / + TT + * * * +
Ri
Rk J
Pour {n + 1 )£„-)-1 <
a
de pente
, la diode Pn+i impose us = Elljr\ de pente
R\llRill---llRk
R0 + R,/lR2l/---llRk
=0.
Ainsi, la caractéristique de transfert se présente sous forme d'une succession de segments, dont les
pentes ak sont détenninées par les résistances R^ et les tensions Ek .
On reproduit une tension us sinusoïdale en choisissant soigneusement Rk et
. Un raisonnement
fondé sur l'analyse harmonique de la dérivée du signal de sortie permet de calculer les valeurs des
composants d'un conformateur rudimentaire à quatre diodes (cf. Exercices).
III. — GENERATION D'HARMONIQUES
III. 1. — Signaux isomorphes
Un signal est isomorphe lorsque, appliqué à l'entrée d'un système, il donne en sortie un signal de
même forme, d'où son nom. Les seules transformations qui réalisent cette conservation de forme sont
l'amplification (multiplication par un réel supérieur ou inférieur à l'unité) et le déphasage :
.?(/) = Ae{t — t)
Effets non linéaires
399
où A et t sont respectivement le facteur d'amplification et le retard. Un signal sinusoïdal est isomorphe
pour tout système linéaire ; en effet, en notation complexe, le signal d'entrée s'écrit :
e(0 =
exp (jcot)
La relation entre l'entrée et la sortie étant linéaire, il vient (cf. chapitre 6) :
s{t) = HiJùj) e(t) = H{jù)) em exp (Jcot) = ^ exp [jcot)
avec
sm = H(jco) em
Notons que la multiplication par un nombre complexe équivaut à une amplification (augmentation ou
atténuation) par le module de ce nombre, et à un déphasage correspondant à son argument. On voit que
l'isomorphie des signaux sinusoïdaux est directement reliée à la linéarité.
Réciproquement, si l'isomorphie des signaux est réalisée à toutes les fréquences, il est possible de
construire une fonction de transfert linéaire EHjca) ; le système est alors linéaire.
La nonrisomorphie du signal de sortie correspondant à une entrée sinusoïdale est a contrario caractéristique de la non-linéarité du système.
Exemple : dans un quadrateur, l'entrée harmonique ue et la sortie correspondante iis ont pour
expressions respectives :
K iP'
ue = um cos.(tôt) et ifç = Km iç = Km iifn cos2{cot) = In
[l + cos(2w/)]
La tension de sortie, dont la partie sinusoïdale a une fréquence double de celle de l'entrée, n'est pas
isomorphe à la tension d'entrée : le système est non linéaire.
III. 2. — Création d'harmoniques par les systèmes non linéaires
a) Signal d'entrée sinusoïdal
Appliquons à l'entrée d'un système non linéaire, un signal sinusoïdal e{î), de fréquence
/ = a)/(27r). En régime établi, la sortie s(t) est périodique, mais non isomorphe à l'entrée, puisque
le système est non linéaire. La symétrie des causes se retrouvant dans celle des effets, selon le principe de Curie (cf. Electromagnétisme), la période du signal de sortie est aussi égale ù T = l/f. On peut
alors écrire :
s{t + T) = s{t)
D'après l'analyse de Fourier (cf. annexe 2), s(t) peut se mettre sous la forme d'une série de signaux
sinusoïdaux comprenant, en plus d'une composante stationnaire, des composantes sinusoïdales de fréquence fondamentale / et de fréquences multiples nf :
cos(277/2/?) + bn sin(27rnft)
Un système non linéaire engendre donc un signal de sortie de contenu spectral plus riche que celui du signal d'entrée. Cet enrichissement harmonique est une propriété essentielle caractéristique des systèmes
non linéaires (Fig. 12.21).
Exemple : dans le système redresseur de la figure 12.22, la tension appliquée à l'entrée est
iie = um cos (ojî) . On observe en sortie :
us = ue
si
ue >0
et
us = 0
si
^ 0
12. Effets non linéaires en électronique
400
Système
non linéaire
Signal périodique
Distortion
harmonique
Signal sinusoïdal
/a
/
Signal sinusoïdal
i
/o
/
Système
Imeaire
Isomorphie
/o
Système
non linéaire
Déformation
>
/
Signal périodique
Signal périodique
/o
/
Signal périodique
/o
/
Système
linéaire
Déformation
*•
éventuelle
/o
/
FlG. 12.21.
Calculons le spectre de Fourier de la tension de sortie. La fonction us{t) étant paire, seuls les
coefficients an ne sont pas nuls :
2 fT/2
2u
fT/4
us{t) cos^Trnf t) d t =—— /
cos{27rf t) cos(27rnf f) dt
j. /
J-T/2
^ J-T/4
4uni
T
fT/4
cos{ù)t) cos{nù)t) dt
soit, en introduisant d = 277/1 :
2u
E1*/2
an = —— /
cos(^) cos(/2^) d^
77 ./a
W
ttL
Fig. 12.22.
Effets non linéaires
401
Pour n = 1 , on a :
a\ =
çirj2
çirll
2
/
COS 0 66 = —
[1+ cos(2^)] d 0 =
77
7T Jo
Jo
2ut.
Pour nff\,on trouve :
••7r/2
um f sin [(;i +
an = — [
(cos [{n + 1)^] + cos [(n — l)6]}d6 = — [
77
77
;t + 1
Jo
'
[
sin [{n — 1)^/2]
n— 1
Si n est impair (n = 2/7 + 1), les coefficients de Fourier s'annulent : aip+x = 0. Si n est pair
{n = 2/7), les coefficients valent :
2^ (-iy
—t.
tt 4/7 — 1
a2p =
puisque
77
sin (2p+I)-J =(-!)"
Comme les coefficients bn sont nuls, en raison de la parité du signal, le développement final est le
suivant :
i
i
? 00 (—] y
- + - cos{«r) - - £
cos (2pcot)
Us{t) = Ur
P=\
^
Le spectre de us, c'est-à-dire la représentation \an\ en fonction de n , fait apparaître un ensemble de
fréquences harmoniques du fondamental (Fig. 12.23). La décroissance des amplitudes des modes est
rapide puisque proportionnelle à l/p2 pour p grand. On voit que le transfert non linéaire, opéré par le
système redresseur, a produit en sortie un signal dont le spectre est enrichi en harmoniques.
Avec une tension d'entrée de 10 V, on observe en sortie une composante stationnaire d'environ
3,2 V, un fondamental à 5 V et les harmoniques 2, 4 et 6 respectivement à 2,1 V, 0,4 V et 0,2 V.
Pn\
5— i
FIG. 12.23.
b) Signal d'entrée périodique non sinusoïdal
Appliquons, à l'entrée d'un système non linéaire, un signal e{t) périodique mais non sinusoïdal,
de période Tq , en régime établi.
Chaque harmonique du signal d'entrée fournit, à la sortie du système, son propre ensemble d'harmoniques. Ces différents ensembles d'harmoniques se combinent entre eux de façon non linéaire pour
former le signal de sortie ^(r).
402
12. Effets non linéaires en électronique
En régime établi, s(t) possède la symétrie temporelle de l'entrée, c'est-à-dire la même période 7b
que le signal d'entrée. Cependant, le spectre du signal de sortie diffère de celui de l'entrée, car les deux
signaux sont de formes différentes. On observe ainsi en sortie un signal périodique déformé par rapport
à l'entrée.
Avec un système linéaire, attaqué par le même signal e[t), l'ensemble des harmoniques de l'entrée
est transféré en sortie avec une amplification et un déphasage différent pour chaque fréquence. En régime
établi, on observerait, en sortie, les mêmes harmoniques qu'en entrée, mais d'amplitudes modifiées par
le système, selon leur fréquence.
Lorsque la plupart des harmoniques significatifs du signal d'entrée sont contenus dans la bande
passante du système, la sortie est proportionnelle à l'entrée ; la sortie et l'entrée ont même forme. En
revanche, si les harmoniques significatifs du signal d'entrée sont partiellement ou totalement hors de la
bande passante, le spectre du signal de sortie diffère sensiblement de celui de l'entrée ; il en résulte alors
des signaux de sortie déformés par rapport à l'entrée.
La déformation d'un signal d'entrée, périodique mais non sinusoïdal, n'est donc pas caractéristique
d'un effet non linéaire.
III. 3. — Distorsion harmonique
La distorsion harmonique est la déformation d'un signal sinusoïdal par un système non linéaire, un
système linéaire ne produisant aucune distorsion harmonique.
Si la tension d'entrée iie est sinusoïdale, ue = um coff tot + <£), la tension de sortie, périodique en
régime établi, peut se mettre sous la forme d'un développement en série de Fourier :
oo
„ cos(27r/î/r) -b b,, sinpTni t)
2
,,=1
L'écart à la forme sinusoïdale est d'autant plus grand que les amplitudes des harmoniques sont importantes. Aussi introduit-on le taux de distorsion harmonique :
Ce nombre sans dimension est en général très inférieur à l'unité ; on l'exprime souvent en pourcentage.
Le signal de sortie est d'autant plus affecté par la distorsion harmonique que D/( est proche de
l'unité. Si £>/, = 0, la tension de sortie est une sinusoïde de même fréquence que la tension d'entrée,
laquelle est éventuellement affectée d'une composante stationnaire ; le système ne présente alors aucune
distorsion harmonique.
Le taux de distorsion harmonique peut s'exprimer aussi en fonction des tensions efficaces du fondamental et des harmoniques, U\
et Uh;ef , somme des contributions de l'ensemble des harmoniques :
U^ Pf =
[a] + b]
et
Uh w =
Di, -
On mesure la tension efficace des harmoniques £//,.<?/ en filtrant le fondamental. L'instrument qui permet
de mesurer le taux de distorsion harmonique est un distorsiomètre.
403
Effets non linéaires
Exemple : distorsion par saturation
Appliquons une tension sinusoïdale ue = ueimcos{(ot) à l'entrée d'un amplificateur linéaire, qui
entre en saturation au cours d'une fraction de période (Fig. 12.14a). Pour calculer l'enrichissement harmonique de la sortie, consécutif à la saturation et donc à l'écrêtage, ainsi que le taux de distorsion harmonique, introduisons l'angle ^
. Explicitons l'expression de us{t) sur l'intervalle [0; r/2], sachant
que la durée de saturation au cours d'une période est rT (Fig. 12.24). Il vient, en posant ds = (ots/4 :
us = iis,m cos 9s
us = us>m cos 9
si
us = —us,m cos 6s
si
0 ^ f < tç/4
ts/4 < r < 7'/2 - ts/4
si
sr m
T/2 — ts/4 ^ t ^ T/2
uAT)
Ms.tn COs(ù)t)
Ms,m COs((XiTJ)y-
Ts 2
TJI
T 1
-ts!4
T 1
.v/4
-li.mCOS.{ù)îé)
l
V
>>
s
/
/
/
!
Fig. 12.24.
Déterminons les coefficients de Fourier de la tension de sortie us(t). La parité de s([) a pour effet
d'annuler les coefficients b,,. Quant aux a,,, on les obtient par la méthode habituelle :
1 fT/2
2 fT/2
a,, = — f
us{t)cos{no)t) dt — — /
iis{t) cos{mot) d t
T -r/2
T '0
Comme coT = 27r , il vient :
i r
an — — / us cos{n9) dd
77
Jo
L'intégrale s'explicite en trois termes :
p0s
/
JO
fTT — 6 s
Us,m cos ds coffnd) d ^ + /
J ûs
(■TT
us,mcosdcos{nd) dd — /
Jtt—Os
cos 6S coffnd) d 6
On peut regrouper les termes extrêmes, en effectuant le changement a = tt — 9 dans la dernière
intégrale. On obtient :
Ux,incos9$ /
cos{n6) dd — u^mcosds /
coffmr — na) d{—a)
= us in cos ds /
Jo
[cos(/î^) — cos(n7r — nd)\ d 9
404
12. Effets non linéaires en électronique
la variable a étant muette. On en déduit :
a,, =
Mo
•77--0,0
COS 0o
77
cos(«0) — cos(/i-7r —n0)] d0-
Itt
^ " Jes
-h
{cos [(m +1)0] + cos [(« — 1)0]} d0
Comme ces deux intégrales s'annulent pour n pair, a2p = 0. Finalement, on trouve pour « = 1 :
ai =
tls,m COS us
77
2 cos 0 d 0
Itt
J0
[l + cos(20)] d0
r
0.v
soit, en effectuant l'intégration :
<21 =
u^m sin(20.v)
0
27r
LIT
(tt - 20,) =
ZTT
[tt + sin(20,) - 20,]
Pour m ^ 3 impair, on obtient, en effectuant :
a,, —
luspn cos 0, sin(n0,)
HTT
us>m f sin[(;2 +1)0,
TT
|
sin[(n - 1)05]
n+ 1
n— 1
Le taux de distorsion harmonique se réduit donc à :
1/2
». -
( E»;
Sur la figure 12.25 on a représenté l'évolution du taux de distorsion harmonique en fonction de
l'angle 0,, qui caractérise la saturation. Pour 0, petit, ce taux reste faible, car la saturation agit tangentiellement aux sommets des crêtes. La valeur atteinte pour 0, = ojT/4 correspond au taux de distorsion de signaux carrés d'amplitude uc_m . En effet, lorsque l'écrêtage est maximal, la fonction n'admet
plus que deux valeurs symétriques, une tension haute et une tension basse.
Dh
0,483-
T/A Os
FIG. 12.25.
En désignant par Uef = uc,m , U\:ef et Uihef les tensions efficaces du signal carré, de son fondamental et des harmoniques, le taux de distorsion DihC a pour expression :
1/2
Uhrf
Dh,c —
u +/
Kef
Uef
1/2
1
U
lef
Comme la tension créneau est paire, alors b\ =0 et :
a\
U[,ef — 7=
v2
avec
/-TV4
6e 1''
.
4 f77/2
4
a\ — —; /
Uc,in COs{ù)t) df —
/
MC!,fjCOS0 d 0 —
Mc,m
TJ0
77 J0
77
On en déduit finalement D/,ïC = (2r2/8 — l)
« 0,483 .
405
Effets non linéaires
IV. _ EFFETS NON LINEAIRES SUR UN OSCILLATEUR
On sait qu'un oscillateur est un système dont l'évolution au cours du temps présente des oscillations, c'est-à-dire des variations alternativement croissantes et décroissantes de ses grandeurs caractéristiques. Cette définition recouvre une multitude de systèmes depuis les plus simples comme le circuit LC en électricité jusqu'aux plus complexes, sièges de phénomènes chaotiques. Aussi l'oscillateur
apparaît-il comme un élément essentiel d'étude des phénomènes variables.
En électronique, les oscillateurs sont utilisés pour produire des signaux périodiques, de fréquences
ou de formes déterminées. Alors que dans les signaux d'horloge, seule compte la fréquence de l'oscillateur, dans les opérations de production ou de traitement du signal, la nature de ce dernier est essentielle.
Dans les deux cas, les non linéarités jouent un rôle déterminant que nous nous proposons d'analyser ici. Le fonctionnement et la réalisation d'oscillateurs feront l'objet d'une étude spécifique ultérieure
(cf. chapitre 14).
IV. 1. — Oscillateurs auto-entretemis
Un oscillateur auto-entretenu est un système capable de réaliser et d'entretenir des signaux alternativement croissants et décroissants, à partir de sources stationnaires d'énergie nécessaires pour alimenter les dipôles actifs. En effet, tout système réel étant dissipatif, un apport d'énergie est nécessaire pour
entretenir des oscillations. Le plus souvent, cet apport est fourni par les sources de polarisation des transistors et des AO. On classe généralement les oscillateurs en deux catégories principales ;
/) les oscillateurs quasi-sinusoïdaux qui délivrent des signaux très proches de signaux harmoniques,
ii) les oscillateurs de relaxation, qui oscillent par transitions successives entre deux états. Ils sont
caractérisés à la fois par les durées de ces transitions, appelées durées de basculement, et par les durées,
plus longues, pendant lesquelles ils occupent ces états en se relaxant.
A ces deux catégories, on peut ajouter celle des oscillateurs paramétriques pour lesquels les équations linéaires comportent des paramètres qui peuvent varier. Par exemple, un oscillateur LC dont la
capacité du condensateur ne garde pas sa valeur est un oscillateur paramétrique.
Examinons les effets de la non-linéarité sur des exemples d'oscillateurs choisis dans chacune des
catégories précédentes.
IV, 2. — Effets de non-linéarité sur un oscillateur quasi sinusoïdal
Un exemple d'influence d'une non-linéarité sur un oscillateur quasi sinusoïdal est l'oscillateur à
résistance négative.
a) Oscillateur à résistance négative
Un oscillateur à résistance négative est un oscillateur auto-entretenu quasi-sinusoïdal. Le circuit
RLC série de la figure 12.26 en est un exemple.
La résistance négative que l'on réalise avec un AO est un élément non linéaire, dont la caractéristique déjà étudiée est représentée sur la figure 12.5b. Choisissons, dans ce montage, la relation suivante
entre les résistances, R2 = 100, ce qui permet d'ajuster finement la valeur de la résistance négative dans le régime linéaire :
R,, = -R — =
Ri
— <0
100
La bobine est caractérisée par son inductance L et par sa résistance r en série ; quant au condensateur,
il est supposé parfait, de capacité C. Le second AO est monté en convertisseur courant-tension, afin de
pouvoir visualiser aisément le courant dans le circuit sur un oscilloscope.
12. Effets non linéaires en électronique
406
ul
:x.
msw
L
r
Ri
MR n
r2
X
7777
-Ra
Fig. 12.26.
b) Amorçage des oscillations
Supposons le circuit initialement au repos, c'est-à-dire sans courant qui le parcourt : ?(0) = 0. Le
dipôle à résistance négative, qui est aussi au repos, fonctionne en régime linéaire. La loi des tensions
donne :
q
di
tic + ul + ur + ur = 0 avec ur,, = Rni soit — + L-—h ri + Rni = 0
C
at
avec les notations habituelles, i = àqj At pour l'intensité du courant et q pour la charge de l'armature
du condensateur vers laquelle est orienté le courant. En dérivant et en introduisant la pulsation propre
«0 = l/^C)'/2 , on obtient :
Os
\
A i
( r + Rn\ Ai
2
L'état initial i{0) = 0 est un état d'équilibre, solution de l'équation d'évolution. Pour étudier sa stabilité,
supposons qu'à t = 0 une petite perturbation bio , d'origine électromagnétique ou thermique, écarte
le système de son état d'équilibre. Admettons en outre que le système ait un comportement pseudopériodique, ce qui est réalisé avec les valeurs des composants qui satisfont à l'inégalité :
r A Rn N
1
E J
a 7
r\
— 4û>o <0
■ a ■
ce qui s écrit
^
Q=
Lûjq
1
> ^ "F Rn
2
La solution de l'équation d'évolution peut alors se mettre sous la fonne suivante (cf. chapitre 4) :
i(t) =
. 0( exp |
sin (f)
\
-— j sin(û>n/ -f é)
2r„ J
avec
r,, =
L
r + Rn
et
con = û>o
/
V
1 —
1
1/2
4^ rj
(j) étant une constante déterminée par la charge initiale du condensateur. Comme il est impossible de
réaliser parfaitement r = —Rn , deux cas se présentent :
i) si Tn >0, soit r > —R,,, l'amplitude des oscillations décroît exponentiellement au cours du
temps. L'état initial est stable et le système reste dans son état de repos ;
ii) si Tn <0, soit r < —Rn , l'amplitude des oscillations croît exponentiellement au cours du
temps ; l'état initial est instable et le système oscille.
407
Effets non linéaires
La réalisation du circuit permet d'observer la croissance exponentielle de l'amplitude des oscillations de la tension u\ = —Rff aux bornes du convertisseur (Fig. 12.27). Concrètement, les composants
choisis ont pour valeurs :
L = 200 mH
C = 10 jxF
/?, = 1 kO
/?2 = 100ka
R3 = \ kEt
r se 20 Et
et
R^3 kil
La mesure de la pseudo-période donne la valeur attendue :
Tn =
27T
277
(O,
0)Q
2tt{LC)x/2 ^ 8,9 ms
On constate que l'amplitude des oscillations cesse de croître au bout de quelques périodes, ce que nous
nous proposons d'interpréter.
uc{t)
URn ij )
-
A A fî A aaA
v vyvvy
FIG. 12.27.
Fig. 12.28.
c) Entretien des oscillations
Le système fonctionne en régime linéaire tant que l'intensité du courant dans le dipôle à résistance
négative reste contenue dans les limites
< i{t) < i,,^- (Fig. 12.5b).
Supposons que l'intensité du courant atteigne le seuil limite i{tni) =
à l'instant t = r„/. À
l'instant ultérieur i >
, la tension URn aux bornes du dipôle à résistance négative a pour expression :
MRii
=
Usât,—
Rl i
En dérivant l'équation sur les tensions fournie par la loi des mailles, on obtient :
d{uc + ut + ur + UR,, )
dî
=0
soit
d^
r-\-Ri\di
2
ht
2 .
+ù, l=0
dr
°
.
duRn
puisque
di
= Ri
dt
Écrivons les solutions de cette équation semblable à la précédente. Il vient, en changeant l'origine des
temps t' = t — fnj, avec i{0) = îq :
1/2
,(
' '')
=
i^exp(-^)sinW/
+
^)
avec
r
''
=
7T^
et
a
'"
= b0
' {'-^)
où (/>' est une constante déterminée par la charge du condensateur à / = 0. Comme la nouvelle
constante de temps
est positive, l'amplitude des oscillations décroît dans le domaine non linéaire.
408
12. Effets non linéaires en électronique
i<
Un résultai analogue est obtenu lorsque le domaine non linéaire est situé en deçà du seuil limite
, puisque la tension % est alors donnée par :
UR,n = Usar,+ + ^i *
avec
duRii
di
—— = R\ —
dr
at
L'équation différentielle est identique :
d2 i
dt2
( r±R\\ di
2.
H- 1
:
— h COnu l — 0
\ L ) dt
En régime établi, le système évolue donc en suivant une succession de phases.
i) Domaine linéaire
L'amplitude des oscillations croît jusqu'à atteindre les limites du domaine de fonctionnement linéaire du dipôle à résistance négative.
ii) Transition du domaine linéaire vers le domaine non linéaire
Lors du changement de domaine, la charge du condensateur et l'intensité du courant dans le circuit
ne subissent pas de discontinuité, la continuité de ces deux grandeurs étant assurée respectivement par
le condensateur et la bobine.
iii) Domaine non linéaire
L'amplitude des oscillations décroît jusqu'à atteindre la frontière du domaine de fonctionnement
linéaire du dipôle à résistance négative.
L'amplificateur opérationnel fonctionne donc périodiquement en régime linéaire et non linéaire. Le
point de fonctionnement du dipôle à résistance négative évolue alternativement entre les deux coudes de
la caractéristique (Fig. 12.5b). L'amplitude des oscillations est donc limitée au domaine :
hii,+ < i < hii,—
Aux bornes du dipôle à résistance négative, la tension présente, au voisinage des extrema, des pics
marquant les excursions du point de fonctionnement dans le domaine non linéaire (Fig. 12.28). Ainsi,
sur une période, un oscillateur quasi-sinusoïdal fonctionne le plus souvent en régime linéaire. Notons
que la non-linéarité du dipôle à résistance négative a pour effet de limiter l'amplitude des oscillations
du système. Cet oscillateur est simulé par le logiciel SPICE (cf. annexe 6).
IV. 3. — Effets de non-linéarité sur un oscillateur de relaxation
Un oscillateur de relaxation est caractérisé par deux durées très différentes : la durée de basculement
Tf, du détecteur de niveau et la durée de relaxation Tr
T(7 (cf. chapitre 14).
Analysons le fonctionnement de l'oscillateur de relaxation électrique représenté sur la figure 12.29.
Supposons qu'à un instant pris comme origine la sortie du comparateur bascule à la valeur
. Celle
en sortie de l'inverseur, et donc à l'entrée de l'intégrateur, est donc us = — UsaJ+ . L'intégrateur délivre
alors la tension uq telle que :
Uc =
~C
aVeC
i=<
dt
= l
R
et
=
+
/ ^d
ce qui donne :
"c(f) =
^ /W)
d
'' = MO) + A £ Usah+ dr' = «c(0) +
t
409
Effets non linéaires
Integrateur
Inverseur
R:.
X,
cc
ur
XI
7777
Uv
Ri
7777
Comparateur
à hystérésis
7777
Fig. 12.29.
Le comparateur change d'état à l'instant t\ , lorsque le seuil de basculement
M-h,+ — Wc(^l ) —
est atteint :
avec
Usar,+ —
=
Ri
R\ + Rj
La sortie du comparateur devient Usât,- < 0, et après inversion, l'entrée de l'intégrateur passe à
—
, d'où la tension uc{t) :
uc{t) = uffti) + ^ ^ Us{t')àt' = mcOi) +
^
La période s'achève à l'instant ti, lorsque le comparateur bascule à nouveau, c'est-à-dire lorsque la
tension seuil ut,,- est atteinte :
Mb,— — Mc{î2) — aj Usât,— — (Xd
"c(ri) +
^ (c - ri)
La tension de sortie de l'intégrateur retrouve alors sa valeur de début de cycle, uc{ti) — mc(0) - La
période T = t2 & la tension crête-à-crête ucc = Mc(ri) — wc(0) en sortie de l'intégrateur s'obtiennent
selon :
Mc{0) = ad Usât,- = Uc(t\
Usât, —
{t2 - ri)
RC
et
«c(ri) = adUSat,+ = uc(0)
U.^■+
(ri - ri)
RC
On obtient, en combinant ces équations :
T = adRC[ 2-
Usat,+
Ux„, _
Usât,—
Usât,-
et
Lt-cc — (*d(Usat,+
Usat,-
Si les tensions de saturation sont symétriques, Usat^ = —Usai,- = Usât, alors ucc = 2adUsat et :
T = Aad RC
Exemple : réalisé avec C = 1 piF, R = R\ = R2 = R?. = 2,2 kfi et des tensions de saturation
symétriques ( Usa, = 15 V ), on trouve pour les caractéristiques du circuit :
a,/ « 0,5
r « 4,4 ms
et
ucc « 7,5 V
12. Effets non linéaires en électronique
410
Les tensions us et uc sont respectivement des tensions créneau et triangulaire (Fig. 12.30). Les deux
échelles de temps du système sont effectivement très différentes : la durée de basculement du comparateur est de l'ordre de la microseconde, tandis que la période des oscillations est de l'ordre de la
milliseconde. Le comparateur à hystérésis est l'élément non-linéaire du circuit; ses seuils de basculement sont commandés par le facteur ad , lequel détermine l'amplitude des signaux triangulaires et la
période des oscillations.
Retenons que, sur une période, un oscillateur de relaxation fonctionne le plus souvent en régime
non linéaire.
u,sat.+
a U
d
Sot,
a
d UsatU.sa!,Fig. 12.30.
IV. 4. — Modèle de van der Pol
Il est toujours possible de mettre, par un changement de variable, l'équation différentielle d'un
oscillateur harmonique sous la forme canonique (cf. chapitre 3) :
x + (OqX = 0.
La grandeur x est alors proportionnelle à une charge en électricité, une élongation en mécanique, une
pression en acoustique, une concentration en chimie, etc. Pour introduire l'énergie £ de Foscillateur,
on multiplie l'équation précédente par x :
xi -1-
-,
=0
ce qui s'écrit
d <5
— = 0
dt
avec
x2
-> x2
£= —h col—
2
2
Exemple : pour une cellule LC parallèle, la charge q de l'une des armatures du condensateur satisfait
à l'équation différentielle (cf. chapitre 3) :
^ Q
1
r\
— + ojQq = 0
avec
9
1
095 = —
La grandeur q satisfait donc à l'équation canonique précédente.
Comme toute réalisation physique est dissipative, il est nécessaire de prendre en compte la puissance dissipée, par effet Joule dans l'exemple considéré. L'équation du circuit devient, en notant Vj
cette puissance :
dé:
= Vj avec Vj <0
dt
L'entretien des oscillations n'est donc possible que si l'on fournit au circuit une puissance supplémentaire V5 :
dé*
-J- = 'Pj + VS avec
> 0
df
411
Effets non linéaires
Pour un oscillateur linéaire, pour lequel les forces associées à Vj et Vx sont proportionnelles à la
vitesse, les puissances dissipée et reçue, s'écrivent respectivement :
Vj=-
x
V,
x
avec
Td > 0
et
Td
rr > 0
Si \Vj\ < Vs, les oscillations s'amortissent exponentiellement. En revanche, si \Vj\> 'Ps, les oscillations croissent indéfiniment, ce qui n'est pas ce que l'on souhaite réaliser.
L'entretien des oscillations exige donc que |iP/| = Vs. Cependant, il est expérimentalement impossible de réaliser rigoureusement cette condition à chaque instant. Un oscillateur auto-entretenu ayant
un fonctionnement linéaire est donc impossible à réaliser. Il en résulte que tout oscillateur auto-entretenu
doit être non-linéaire.
En régime établi, l'énergie de l'oscillateur est en moyenne constante au cours du temps, ce qui
implique une compensation des pertes par apport d'énergie sur la durée d'une période :
ff = ps + rJ = o
at
d'où
vs = -Vj
a) Oscillateur de van der Pol
Les premières études expérimentales de la dynamique des systèmes oscillants ont été réalisées,
à partir de 1920, par l'ingénieur hollandais B. van der Pol: aussi, le premier de ces oscillateurs autoentretenus, que l'on a représenté sur la figure 12.31, porte-t-il son nom.
Un
ICI
IR
lia
V
FIG. 12.31.
Le dipôle non linéaire T) est constitué par une triode polarisée au voisinage de la tension uq , dont
la caractéristique i = i{u) est bien représentée par l'équation suivante du troisième degré (cf. Exercices) :
-ii'-'Q
Dans cette expression, R,, < 0 désigne la résistance dynamique négative de V au voisinage de la
tension nulle. La loi des nœuds donne :
+ b? +
^
+? =0
avec
r
u=L
d iz.
q
= Rir = —
dr
C
et
.
d <7
ic = —
at
En dérivant l'équation précédente et en substituant afin de faire apparaître la seule tension u , on obtient
l'équation suivante du circuit :
412
12. Effets non linéaires en électronique
l//2
En introduisant la pulsation propre wq = (LC)
..
. / 1
et la variable x = u \fC, cette équation devient
3x2
1
\
,
Évidemment, la croissance des oscillations n'est possible que si (cf. chapitre 3) :
1
1
\RC
RnC
RnChil)
On voit que, pour un système initialement au repos (x = 0 ), il est nécessaire d'avoir :
+
^
i<0
soit
i
R
Rn
et donc
R > —Ri,
Dans le cas contraire, la dissipation provoque un amortissement.
Il est commode de mettre l'équation de van der Pol sous la forme réduite suivante :
xH
X 2^-1
✓ r + ru0 x = 0
ou ——
Te(x)
Te[x)
1
R+R
— >0
RR
tq
e,
x
ro V
xi = u0C '
f
j
b) Analyse de la non-linéarité
Pour effectuer le bilan d'énergie, multiplions l'équation précédente par x. Il vient :
d /X2
dt \ 2 ^
2x2\
0)0
2)
x2
1 f.
Te (x)
^2\ -2
x
j)X
tq V
ce qui s'écrit :
dS
= V{-"c)
avec
„
x2
0X2
£ = -+(Â-
V{nc) =-
et
x2
Te{x)
1
T(l v
x
l
On reconnaît l'équation-bilan d'un oscillateur harmonique, d'énergie 8 , qui reçoit la puissance supplémentaire
. Deux cas se présentent :
i) v(nc) > 0, soit x < X/, l'oscillateur reçoit du dipôle non linéaire plus d'énergie qu'il n'en
dissipe et l'amplitude des oscillations croît.
H) ■p("c) ^ q ^ sojt x > x;, l'oscillateur dissipe plus d'énergie qu'il n'en reçoit et l'amplitude des
oscillations décroît.
Ainsi, en régime établi, l'amplitude des oscillations est tour à tour croissante puis décroissante, au
cours d'une période. Comme la puissance moyenne reçue doit être nulle, on a :
0
d'où
x2 xf = x2 x2
Effets non linéaires
413
c) Naissance des oscillations
L'étal initial x = x = 0 n'est pas stable, puisqu'au voisinage de * = 0, on a \/re{x)
et par conséquent l'équation linéarisée suivante de l'oscillateur :
x
|-6;5x = 0
Comme les racines de l'équation caractéristique correspondante r2 — r/ro +
1
2to
-iAo
±J0)(]
= 0 sont :
i
v/2
^oTo)
A
V
on trouve, pour Qq = (oqTq > 1/2 , la solution générale suivante :
x(f) = C/^exp
cos{(ûpt -f-
avec
(op — (oq
1
4w t
o O
Cp et (f)p étant deux constantes. Ainsi, l'amplitude des oscillations croît exponentiellement ; le bruit
électromagnétique ou thermique est alors suffisant pour amorcer les oscillations.
d) Intérêt du modèle de van der Pol
L'entretien des oscillations n'est rendu possible qu'à condition de réaliser
< 0 pour de faibles
valeurs de x, et
> 0 pour des valeurs de x plus grandes. Le passage par zéro et la singularité
qu'il entraîne incitent à analyser des fonctions l/r^(x) assez régulières pour être développées en série
entière :
"777 = E ^
La parité Te(—x) = Te(x) étant souhaitable pour obtenir des oscillations symétriques, les coefficients
Ai, avec i impair, doivent être nuls. La méthode la plus simple consiste à tronquer ce développement à
l'ordre 2 :
1
. 9
-r-- — AQ + A2X
rffx)
En choisissant Ao < 0 et A2 > 0, on a bien Te{x) < 0 pour les faibles valeurs de x, et re(x) > 0
aux grandes valeurs. On retrouve donc, pour le terme dissipatif, la même forme que celle du modèle de
van der Pol, ce qui confère à ce dernier un caractère remarquablement simple.
L'équation de l'oscillateur de van der Pol comporte trois paramètres cuq , tq et x/. Cependant
la discussion de son comportement ne nécessite que l'un des trois, qu'il est naturel de prendre égal à
go =
lorsqu'on introduit les variables réduites de position et de temps :
X
=
—
d
=
(Oot
On a en effet :
Te (x) d d
COqXI X — 0
ce qui donne, en divisant par ùj^ x/ :
d2 X
l-X2dX
Qo
dd
+x= o
414
12. Effets non linéaires en électronique
Notons que Qo est directement relié au rapport de deux durées caractéristiques :
Qo = O)0Tq = 277 ~
Jq
En effet, la durée Tq est précisément la période des oscillations sinusoïdales associées à l'oscillateur
harmonique que l'on obtiendrait en annulant tout apport ou dissipation d'énergie dans le système. Quant
à la durée ro , elle caractérise l'échelle de temps sur laquelle l'amplitude des oscillations varie de façon
significative depuis l'état de repos. En régime linéaire, pour lequel :
x
x + co^x = 0
to représente la durée de relaxation en énergie de l'oscillateur de van der Pol, linéarisé au voisinage
de l'état de repos.
Il reste à examiner l'influence du paramètre critique Qq sur la nature des oscillations du système
en envisageant deux cas limites, Qq
l pour les oscillations quasi sinusoïdales et (2o ^ 1 pour les
oscillations de relaxation.
Remarque : Il existe de nombreux oscillateurs réels qui, de manière approchée, sont décrits par cette
même équation, par exemple l'oscillateur à diode Esaki.
e) Oscillations quasi sinusoïdales
Supposons le paramètre Qq très grand :
Qq > 1
soit
Tq > Tq
Dans ce cas où l'équation canonique se réduit à à~X/ à9- -EX = 0, recherchons une solution de
l'oscillateur réel de la forme :
X = Xm{e) sin(6> + ^)
où Xm{d) est lentement variable, c'est-à-dire qu'il ne varie pratiquement pas pendant une période.
Comme :
éX
dX.
—- = —— sm(0+(l>)+Xm cosO-t»
d8
dv
et
d2 X
—^
dv*-
d2X„
^ sjn{6>+^)+2—— cos{dE4>)~Xni
dudd
l'équation de l'oscillateur devient :
sin
(^ +
+ 2^ cos(^ +
~ [1 - X,; sin2(0 H- ff)]
sm{ô +
+ Xm cos(d + </»)
=0
En tenant compte de la faible variation de Xlll{6), on obtient, en multipliant les deux membres de
l'équation précédente par Xm cos(# -f (p) et en moyennant sur une période :
-d8X-
_n(l_KL\_0
QA1
4 ff0
sin(^ + (f)) cos(6 + cj>) = 0
cos2($ -j- 0) = ^
2
sinJ(^ + cp) cos{6 E <p) = 0
sin2(^ E fp) cos2{6 E (p) = ^
8
Effets non linéaires
415
L'équation différentielle précédente s'écrit aussi :
dg-ffl-ÇUo
Ôo V
en posant
soit
4/
d#<2o\
.=^
4/
En vue d'intégrer cette équation non linéaire, séparons les variables (cf. annexe 1) :
4dF/F2
dF
F(1 - F/4)
=
477^1
d6
=
. _
^
.
ce qui s écrit
du;
d6
—
Qo
pour F < 4, en posant w = 4/F — 1, ce qui implique du; = —4/F2 d F. Cette dernière équation
s'intègre aisément selon :
ln
ôo+C
7
C étant une constante, d'où :
^
1 2
[1 + exp(—0/go + C)] /
et
2xi
jc(?) =
^ sin(u;o/ + ff)
[1 + exp (—t/re + C)]
Ainsi, après un régime transitoire, dont la durée peut être estimée à ?>Te , les oscillations tendent vers
une sinusoïde, de période Tq = 2-77/coq .
Vérifions qu'en régime établi, le mécanisme d'entretien des oscillations est une succession d'apports et de dissipations d'énergie :
x{t) = 2xi sinf^ot + 4>)
et
x(t) = 2xi (ûq cos((Uot + (f>)
d'où:
x2 x2 = 4x/(yoCOS2(û;o/
<ff) = 2xj(ol
et :
K 4 <y2 sm
• 2/[Mott +
\ <p) cosz2((wo?* +\ ç»)
A.\ = 1I
xz2-0
xz = lox^
0
r + 0)] AI
2
^ 4w
2 = x,x
2-2z
= 2x,
/ (On0 —
•
On a donc bien x2x2 = x2x2 . Sur la la figure 12.32a, on a représenté la courbe X{d) pour Qo = 10.
En régime établi, les oscillations sont quasi-sinusoïdales.
Ôo=10
m
2-
e„=o,i
2-
ôo=l
2--
- « A A aAl
» v y vy
f
¥
Jllll
-2a)
-2-b)
FIG. 12.32.
c)
12. Effets non linéaires en électronique
416
f) Oscillations de relaxation
Lorsque le paramètre Qq est faible ( (2o 'C 1 ), par exemple Qo = 0. I (Fig. 12.32b), on observe
que le régime transitoire est très court et que l'écart à la forme sinusoïdale est significatif : à une variation
rapide du signal, succède une durée beaucoup plus longue de faible variation, et les signaux sont plus
proches de créneaux que de sinusoïdes.
Il est possible d'estimer deux échelles de durées caractéristiques des oscillations de relaxation.
Pour cela, utilisons l'équation de van der Pol linéarisée autour de l'amplitude Xq = Xffo) :
â2X
d^
1 — Xq dX
+X=0
dtf
La résolution de l'équation caractéristique, r2 — r(l — Xq)/Qq + 1=0, conduit à introduire les deux
durées suivantes de 6 :
0 = ^ {0 - + ± [(I - +2 - 405],/2}
Pour simplifier la discussion choisissons le cas technique simple pour lequel Xq = 0 . Il vient :
0 = + [l ±(l-4e5)l/2l ~
J
J-Qo
d'Où
e,
et
0^QO
Qo
On en déduit les deux échelles de durée en divisant $[ et 62 par coq :
et
mqQO
~ —
& = To
T] ~
(OQ
Autour de $q , une solution approchée de l'équation de l'oscillateur s'écrit :
X{0) = affo) sinh
^
^
Qo
+ hffo) cosh [Qo{d - é'o)]
où affo) et i'(^o) varient peu sur le palier. Au point A sur la figure 12.32b, «(#0) « 0 puisque le
signal varie peu et que la tangente est horizontale. L'angle caractéristique du palier est d'environ 1 /(2o •
En B, (2(^0) 7^ 0 » l'angle caractéristique du basculement est d'environ Qo , d'où la période angulaire
des oscillations et la période temporelle correspondante :
M ~Qo +
■
soit
Qo
Qo
^
Aé»
1
T « — = ——
^0
Qo^o
Retenons que la présence des deux échelles de temps très différentes caractérise les oscillations de
relaxation. L'oscillateur de van der Pol produit des oscillations quasi-sinusoïdales pour des fortes valeurs
du paramètre critique <2o
1, et des oscillations de relaxation pour les faibles valeurs de <2o -C 1 •
La transition entre les deux régimes est continue comme le montre la figure 12.32c obtenue lorsque
<2o~i.
IV. 5. — Espace des phase et portrait de phase d'un circuit
a) Espace des phases d'un circuit
En mécanique, Vespace des phases d'un système est l'espace des états, dont on sait que la dimension est le double de celle de l'espace de configuration ou des degrés de liberté (cf. Mécanique) : n coordonnées généralisées {qî] , auxquelles on ajoute un même nombre n de moments conjugués {/?,}
417
Effets non linéaires
définis selon :
Pi -
dcn
C = £k — £p désignant le lagrangien du système, différence des énergies cinétique et potentielle.
À chaque instant, l'état mécanique du système est déterminé par la connaissance des 2n variables
{qi.Pi} , issues des 2n équations différentielles du premier ordre que sont les équations canoniques
(cf. Mécanique), ce que l'on représente par un point figuratif dans l'espace des phases. Notons qu'en
mécanique, la dimension de l'espace des états est ainsi paire.
En électronique, on recherche d'abord le nombre de variables indépendantes qu'il faut se donner
pour connaître l'état électrique du système ; un circuit comportant h branches et n nœuds est analysé à
partir d'un ensemble de Ne — b — n-\- \ équations différentielles indépendantes (cf. chapitre 5). On en
déduit le nombre Np d'équations différentielles du premier ordre qui décrivent totalement le système,
et donc le nombre de variables indépendantes qui définissent l'état électrique du circuit.
Il en résulte que l'espace des états, ou espace des phases en électronique, est un espace à Np
dimensions. Comme l'état d'un système électronique est entièrement déterminé par la connaissance des
courants dans ses branches, ce qui n'implique pas nécessairement un ordre pair, la dimension de l'espace
des phases peut être impaire.
Exemples :
1) Un oscillateur harmonique en électronique est décrit par une seule équation différentielle du second
ordre, d'où l'ordre
= 2 et la dimension 2 de l'espace des phases.
2) Un ensemble de N oscillateurs harmoniques électriques couplés est caractérisé par N équations différentielles du second ordre; l'ordre du système est donc Np = 2N et l'espace des phases de dimension 2N.
3) Le circuit, proposé par l'électronicien américain L. Chua, est connu pour son comportement chaotique. Comme le montre la figure 12.33, il possède 5 branches et 3 nœuds ; le nombre de variables indépendantes est donc iVe = 5 — 3+1=3 reliées par 3 équations différentielles du premier ordre qui
s'écrivent (cf. annexe 6) :
C,
Cl
dnç,]
ât
d uçp
ât
dit
L
ât
^ («C,2 — Wc, 1 ) - £ "C, I
+ - ^ (Mc,2 - «C, I )
-"+2
g désignant la conductance du dipôle résistif V. Le circuit de Chua est donc d'ordre Np = 3 et
l'espace des états de dimension 3 .
c,i
FlG. 12.33.
FIG. 12.34.
12. Effets non linéaires en électronique
418
b) Portrait de phase d'un circuit électrique
Dans l'espace des phases, l'évolution à partir d'un point figuratif Mq initial est une courbe paramétrée par le temps. Un même état initial définissant de manière univoque l'évolution, les trajectoires de
l'espace des phases ne peuvent se croiser. L'ensemble des trajectoires de l'espace des états forme le portrait d'état ou portrait de phase du système.
Exemple : on sait que l'équation d'évolution du second ordre q + oi^q = 0 d'un oscillateur
harmonique électrique peut se mettre sous la forme de deux équations différentielles du premier ordre :
q= i
dont la solution s'écrit, si qm et
et
i — —(n^q
sont deux constantes définies par l'état initial :
q = qm cos{(ûqî + (p)
et
i = ~ù)Qqm sin(wo? + <p)
L'espace des phases est à deux dimensions (Fig. 12.34). Les trajectoires sont des ellipses de même
rapport d'axe wq , puisque q et i sont reliées par l'équation caractéristique d'une ellipse :
Qui )
o)Qqm
Les petit et grand axes des ellipses, obtenus pour différentes conditions initiales, coïncident évidemment
avec les axes du repère {q. i) .
Remarque : L'étude dans l'espace des phases de l'évolution au cours du temps des systèmes quelconques, mécaniques électriques ou autres, s'est avérée très efficace dans l'analyse du
rôle des termes non linéaires dans les équations qui régissent ces systèmes. Une branche
nouvelle s'est ainsi développée sous le nom de systèmes dynamiques ; elle fait actuellement l'objet d'activés recherches en physique classique ou quantique.
c) Attracteurs
On appelle attracteur un point, une courbe, une surface ou une hypersurface de l'espace des phases,
vers lesquels tend un ensemble de trajectoires. Il existe de nombreux types d'attracteurs. Citons-en
quelques exemples.
i) Positions d'équilibre
Dans l'espace des phases, un point d'équilibre est un attracteur.
Si l'équilibre est stable, les trajectoires convergent vers le point attracteur (Fig. 12.35a). Ainsi, un système linéaire du second ordre décrit par l'équation bien connue (cf. chapitre 3) :
x -\
X
o
f- û)0 x = 0
avec
r,, > 0
Te
admet l'origine comme point attracteur.
Si l'équilibre est instable, les trajectoires divergent du point attracteur (Fig. 12.35b). Il en est ainsi pour
un système linéaire du second ordre décrit par l'équation :
y
1-û>oJic = 0
avec
re > 0
Effets non linéaires
419
x
b)
c)
FlG. 12.35.
ii) Cycle limite
Un cycle limite est une courbe fermée de F espace des phases vers laquelle convergent les trajectoires. Une trajectoire qui, dans cet espace s'appuie sur un cycle limite, caractérise une évolution
périodique. Ainsi, un oscillateur périodique d'ordre deux converge vers un cycle limite (Fig. 12.35c).
iii) Évolution quasi-périodique
Considérons un système bipériodique d'ordre 3 tel que le système linéaire admettant les solutions
suivantes :
x,(t) = an cos(2-7r/i r + <£ii)+ai2Cos(27r/2t + <£i2)
X2(0
=
a1{ COs(277/| t + 021 ) + ^22 COSpTT^ t + 022)
Xfft)
=
(33, COS(277-/| t + 03| ) + Û32 COS(27702 t + 032)
Dans l'espace des phases de dimension 3 , l'attracteur est un tore (Fig. 12.36a). Deux cas se présentent :
- si les fréquences f et fy sont commensurables, c'est-à-dire si le rapport /1//2 est un nombre
rationnel, les trajectoires se referment sur elles-mêmes ; l'évolution est périodique,
- à l'inverse, si le rapport /1//2 est irrationnel, les trajectoires s'enroulent autour du tore sans
jamais se refenner; la surface du tore est alors remplie de façon dense. Ce type d'évolution,
rigoureusement apériodique, est qualifié de quasi-périodique.
iv) Évolution chaotique
La caractéristique essentielle du chaos déterministe (cf. Mécanique) est la sensibilité aux conditions initiales, ce qui se traduit dans l'espace des phases par la divergence exponentielle des trajectoires
issues de deux points initialement proches. L'évolution d'un système chaotique est apériodique et les trajectoires convergent vers un attracteur étrange ; sur la figure 12.36b, on a représenté, en projection dans
le plan («c,! 5 uc,i) > l'attracteur étrange du circuit de Chua, à comportement chaotique (cf. annexe 6).
b)
FIG. 12.36.
12. Effets non linéaires en électronique
420
d) Portrait de phase d'un oscillateur quasi-sinusoïdal
Le circuit RLC à résistance négative de la figure 12.26, est décrit par une équation différentielle
du deuxième ordre. Ce système est donc d'ordre 2. On peut choisir de l'analyser à l'aide des variables
q eX q = i. Expérimentalement, on préfère prélever sur le circuit la tension lie = qfC aux bornes du
condensateur et celle —R^i à la sortie de l'AO, respectivement proportionnelles à ^ et ^ Le portrait de phase que l'on obtient révèle l'existence d'un attracteur, qui prend la forme d'un
cycle limite presque elliptique (Fig. 12.37a). Les écarts à l'ellipse sont dus aux effets non linéaires qui
entretiennent les oscillations. Le point central O est un état d'équilibre instable, duquel la trajectoire
s'écarte exponentiellement.
lis
R'i i
l-lsat,+
0
u
c
Usât, —
b)
a)
FIG. 12.37.
e) Portrait de phase d'un oscillateur de relaxation
Pour l'oscillateur de relaxation représenté sur la figure 12.29, l'état du système est univoquement
défini par la connaissance des variables tic et us. La trajectoire dans le plan de phase exhibe des points
anguleux (Fig. 12.37b).
f) Portrait de phase de l'oscillateur de van der Pol
Le portrait de phase de l'oscillateur de van der Pol peut être tracé en utilisant les variables réduites
XAX/àe.
Pour une forte valeur du paramètre critique Co = 1CL
portrait de phase ressemble à celui d'un
oscillateur quasi-sinusoïdal, c'est-à-dire à une ellipse (Fig. 12.38a).
Pour une faible valeur ( Co = 0^ 1 )» Ie portrait de phase présente des points anguleux, comme pour
l'oscillateur de relaxation (Fig. 12.38b).
Enfin, pour Qq — \, le portrait de phase présente un aspect intermédiaire entre les deux formes
(Fig. 12.38c).
Ainsi, l'observation du portrait de phase d'un oscillateur renseigne sur sa nature : quasi-sinusoïdale
ou relaxation. Le modèle de van der Pol montre qu'il est possible de passer continûment de l'une à
l'autre.
dX/dO* 1
Qo = 10
dXj d 6 '
s
Ôo = o, i
S
A
\
s/
X
\
\
\
\
S
\
N\
X^
^
Cycle limite
b)
FIG. 12.38.
il
dX/dÔ
lr
i\
\\
\
f
\1\
\\
0
)
y
vV \«
VV i\
V \
V1' 11 ^
*
x
s'
x '' Cycle limite
c)
Effets non linéaires
421
CONCLUSION
Rappelons les points essentiels.
1) Le caractère non linéaire d'une relation de correspondance entre les grandeurs d'entrée et de
sortie du système s'exprime par la non-proportionnalité de ces deux grandeurs. On sort alors du cadre
d'application du théorème de superposition.
2) De nombreux dipôles en électronique ne sont pas linéaires, par exemple les diodes. Les opérations de comparaison, de redressement, de mise en forme des signaux, de multiplication, sont des
opérations typiquement non linéaires.
3) Le transfert non linéaire d'une entrée sinusoïdale provoque la distorsion du signal d'entrée. Le
taux de distorsion harmonique D/? permet de mesurer l'écart du signal à la sinusoïde de son fondamental
E>k = Uihef/U\)ef
4) L'entretien des oscillations d'un oscillateur auto-entretenu doit être attribué à un effet nonlinéaire. En régime établi, au cours d'un cycle, l'oscillateur reçoit une quantité d'énergie d'une source
et en restitue autant.
5) Un oscillateur quasi-sinusoïdal fonctionne le plus souvent en régime linéaire, contrairement à
un oscillateur de relaxation.
6) Dans l'espace des phases, le cycle limite d'un oscillateur quasi-sinusoïdal est proche d'une
ellipse, alors que celui d'un oscillateur de relaxation s'en écarte notablement.
7) L'équation de l'oscillateur de van der Pol fait apparaître un terme non linéaire d'expression
caractéristique dans l'équation canonique en variables réduites :
d^ i-x^d*
de2
Qo de
o
Pour les fortes valeurs du paramètre critique Qq , l'oscillateur délivre des oscillations quasi-sinusoïdales,
alors que pour de faibles valeurs, il produit des oscillations de relaxation. Retenons qu'entre ces deux
grandes familles d'oscillateurs, la transition est progressive.
xi
o
c
Û
r-i
EXERCICES ET PROBLEMES
P12- 1. Dipôie non linéaire
(M
D.
0
Le dipôie représenté sur la figure 12.39 comporte deux diodes de même résistance dynamique
— 10 û dans le sens passant ; en inverse cette résistance devient pratiquement infinie. La tension de
seuil Ua des diodes vaut 0,7 V . Quant à la f.e.m de la source stationnaire, elle est de £" = 15 V .
1. Déterminer la caractéristique du dipôie AB. Quel dipôie réel simule-t-il ?
2. Le dipôie AB débite un courant d'intensité 7=15 m A . Calculer la tension U . Même question
pour un courant d'intensité —15 mA .
3. Quels sont les générateurs de Thévenin correspondants aux cas / > 0 et 7 < 0 ?
422
12. Effets non linéaires en électronique
U
:x
©
«
V
V
u
7777 7777
Vn
FIG. 12.39.
7777
7777
FIG. 12.40.
P12- 2. Inverseur commandé
Le circuit de la figure 12.40 est commandé par la tension Uc. Les diodes sont supposées idéales et
sans tension de seuil, la tension d'entrée l]e est une tension stationnaire positive telle que lJe < \UC\.
1. Déterminer la caractéristique de transfert du système en fonction de la tension de commande.
2. Quelle est la résistance de sortie du montage ?
P12- 3. Division d'une tension
Dans le circuit de la figure 12.41, le coefficient du multiplieur vaut Km = 0,1 V-1 . Déterminer la
caractéristique de transfert us = us{u\, U2) du système.
K
X
—
^
Rr.
7777
ic
i
Uk
A1
1.1,
7777"
'p .
Iz*
_r
7777 7777
FIG. 12.41.
FIG. 12.42.
P12- 4. Stabilisation Zener
Sur le circuit de la figure 12.42, la diode est représentée par sa tension Zener
= 15 V et sa
résistance dynamique en régime d'avalanche rz = 10 H . La résistance de charge et la résistance de
protection valent respectivement Rc = 1 kfl et Rp = \00 El.
1. Déterminer la valeur minimale
alors us ?
de la tension ue, afin que us soit régulée. Que vaut
2. La diode Zener ne supportant pas une puissance électrique supérieure à 1 W, calculer la valeur
maximale Ue,max de la tension ue admissible.
3. Calculer la variation relative des tensions us et ue dans le domaine de stabilisation. Conclure.
P12- 5. Base de fonctionnement du wattmètre analogique
vWet)
Sur la figure 12.43, on a représenté un circuit comportant un multiplieur analogique qui réalise
l'opération s = Km(X2 — ^i)(y2 — yi) » avec
= 0,1 V-1 . Le dipôle V est parcouru par un courant
Effets non linéaires
423
d'intensité i. Le circuit est alimenté par une tension variable ue d'amplitude 8 V. On donne r — 10 O,
/? = 100 kn et C = I jjlF .
1. Déteraiiner la tension u\ en fonction de u-p , i, Km et r. Que représente u\ ?
2. Quelle fonction réalise la cellule RC sachant que ue est une tension sinusoïdale de fréquence
1 kHz ? Que représente us ?
3. Calculer successivement les valeurs prises par us dans les trois cas suivants : T> est un condensateur parfait, une bobine pure, un résister de 1 kfi.
r
Up
li
i
V
V2
X|
>'2
x K
R
n
S
ni
);l
C
7777
X
FIG. 12.43.
u*
U\
Us
V
77777777
7777
7777"
FIG. 12.44.
P12- 6. Analyseur de spectre
Dans le montage représenté sur la figure 12.44, le quadripôle T> est un filtre passe-bande, centré
sur la fréquence ff = 2,5 kHz, de facteur de qualité Q = 15 . Le signal d'entrée ue{t) est périodique,
de fréquence /, alors que la tension uv est sinusoïdale de fréquence fv .
1. Trouver les harmoniques présents dans la tension de sortie u \ du multiplieur.
2. La tension uv est maintenant produite par un vobulateur qui balaie le domaine de fréquences de
/0 à fmax = 100/o .
a) Qu'observe-t-on à la sortie de D ?
b) Calculer la bande passante du dispositif.
P12- 7. Contenu harmonique de signaux symétriques et de signaux non symétriques
1. On rappelle qu'un signal périodique eff), de période T, est symétrique si e{t + T/2) = —e(t).
a) Montrer qu'un signal symétrique ne contient pas d'harmonique pair.
b) La limitation de la vitesse de montée d'un montage suiveur, à base d'AO, a pour effet de « triangulariser » les signaux de sortie. On suppose l'entrée sinusoïdale, d'amplitude 8 V , et la sortie triangulaire de même amplitude. Quel est le spectre de Fourier de la sortie et l'amplitude des deux premiers
harmoniques ?
2. Calculer le spectre de Fourier ainsi que l'amplitude des deux premiers harmoniques d'un signal
dissymétrique produit par un redresseur parfait, simple alternance, qui est alimenté par une tension
sinusoïdale d'amplitude 10 V .
424
12. Effets non linéaires en électronique
P12- 8. Distorsion d'intermodulation
La caractéristique de transfert d'un amplificateur réel est approximativement représentée par la
relation suivante entre la tension d'entrée ue et la tension de sortie us :
"f- Kntue
11$ —
dans laquelle /12( = 10 et Km = 0,08 V-1 .
1. Calculer le taux de distorsion harmonique de cet amplificateur pour une tension d'entrée sinusoïdale de valeur efficace 8 V .
2. L'amplificateur est soumis à une tension d'entrée ue qui est la somme de deux tensions sinusoïdales, de même amplitude et de fréquences respectives 5 kHz et 5,5 kHz.
a) Quel est le contenu spectral en sortie de l'amplificateur.
b) On appelle intermodulation, l'apparition de fréquences non contenues dans le spectre de la
tension d'entrée. Déterminer la fréquence la plus basse d'intermodulation pour l'entrée précédente.
P12- 9. Conformateur sinusoïdal
La caractéristique de transfert du conformateur sinusoïdal à quatre diodes de la figure 12.45a est
représentée sur la figure 12.45b.
H
_L
Ro
5A
3C
EiE,
llp m
ue
IL A
V
V
Me^2
M.
\/D2
' O
/
El
,r «1
i
Ei
ai
| Mef2 Uç
*-uf.
K
—E2
b)
FlG. 12.45.
1. On cherche à établir les relations entre ue^\ ,
circuit.
et les paramètres Rq , R\
y
E\ , E2 du
a) Quel est le rôle de F AO ?
b) Montrer que iis = ue tant que | Ue\ < E{ . En déduire la relation simple entre ue^ et E\ .
c) Établir la relation entre us et ue pour ueq < \ue\ < «^ 2 • Trouver alors, en fonction de Rç) et
R\ , la pente a\ = {E2 — £'i)/(Me,2 — ue,[) ■ Exprimer uej2 en fonction de E\ , ZL et a\ .
2. Pourquoi la tension de sortie us devient-elle indépendante de ue pour | Ue | ^ Uej2 ?
3. La tension d'entrée du système, nulle et croissante à l'instant origine, est triangulaire, d'amplitude ue^n = 10 V et de période T. Calculer les coefficients de Fourier de la dérivée ùs(t) de la tension
de sortie en fonction de uej , ue^2, £2 et ai ,
4. On cherche à optimiser le conformateur étouffant le plus possible d'harmoniques.
a) Trouver les valeurs de ue_\ et
pour lesquelles l'harmonique de rang 5 s'annule.
Effets non linéaires
425
b) Quelle valeur de ai faut-il choisir pour que l'harmonique de rang 3 s'effondre complètement ? En remarquant que sin^-jr/S) = — sin(37r/5) et sm(147r/5) = — sm(67r/5), montrer que
l'harmonique de rang 7 s'annule également. Calculer la valeur des paramètres Ei , E2 et R\ du circuit, lorsque Rq = 5 kfi.
c) Représenter l'allure de la tension de sortie. Quel est le rang du premier harmonique non nul ?
Calculer le pourcentage de la puissance du fondamental qu'il représente.
P12- 10. Oscillateur parallèle à résistance négative
Dans le montage de la figure 12.46a, les valeurs des composants sont les suivantes : C = 22 jjlF ,
L = 75 mH , r = 500 fî et R\ = R2 = 2,2 kfl. Le dipôle T> est celui représenté sur la figure 12.46b.
1. Trouver la caractéristique de D , étudier sa stabilité et conclure sur son comportement dans le
circuit.
2. En régime de fonctionnement linéaire de
tension uc aux bornes du condensateur.
, établir l'équation différentielle satisfaite par la
3. Dans quelle condition obtient-on des oscillations ? Quel phénomène limite leur amplitude ? Donner une valeur approchée de l'amplitude de la tension uc ■
Ri
l>
" 'c
Uc
t
IR
C
IL
L
i^
n:
—c
V
Ri
R
7777
a)
b)
Fig. 12.46.
P12-11. Oscillateur de van der Pol à AO
Un exemple de réalisation de l'oscillateur de van der Pol, à base de circuits multiplieurs et d'AO, est
donné sur la figure 12.47. Les valeurs des composants sont les suivantes : R\ «2,2 kO, R? ~ 100 kfl,
i?3 « 1 MO,
« 5 kfi,
« 1 kn, r « 100 El, -Rn « 100 D, Km « 0. 1 V-1 , C « 0,2 pE et
L « 150 mH.
1. Quelle est la nature du dipôle Dn ? Préciser les rôles joués par les quadripôles Q\ et Q2 ?
2. À quelle condition peut-on négliger les courants i\ et *2 devant i ?
3. On suppose la condition précédente réalisée. Établir l'équation du circuit en fonction de la tension uc aux bornes du condensateur et de la tension uni à la sortie de Q2 •
4. Calculer u\ , 112 et «3 en fonction de uc ■ En déduire de la question précédente m,,/ en fonction
de uc et trouver l'équation différentielle du circuit.
12. Effets non linéaires en électronique
426
5. Montrer que l'équation différentielle précédente peut se mettre sous la forme :
d uc
2
dr
1 dr^c
^ r dr
+ (OqUc = 0
avec
1
— =
( 1
j
*0
On explicitera les quantités wo, to et iq en fonction des valeurs des composants du circuit, et on
précisera leurs unités SI.
6. Trouver le paramètre critique Qq de l'oscillateur en fonction des composants du circuit. Calculer
les valeurs de la résistance variable Rv de Vn telle que (2o = 100 et go = 0^ 1 •
7. Comment réaliser expérimentalement le portrait de phase de cet oscillateur ? Décrire la nature
des oscillations obtenues pour chacune des valeurs de go ■
Quadnpole Qi
Ri
U\
oc
KW X
"
*>
Ri
X
ZiA
/o*
Ri
, K.
/?,
oc
L, r
—
X
■*
Uc
m
UL
+
Un!
Ur
R4
Rs
7777
IX
7777
/
Quadnpole Q2
^
/ Rn
7777
R\
Dipôle
FIG. 12.47.
P12- 12. Oscillateur historique de van der Pol
Sur la figure 12.31, on a représenté l'oscillateur à triode construit par van der Pol. On désigne
par M le coefficient d'induction mutuelle reliant la tension grille ug à l'intensité it du courant dans la
bobine du circuit oscillant.
1. En négligeant l'intensité ig du courant de grille, établir l'équation différentielle reliant l'intensité
ia du courant dans le circuit anode à la tension ua de l'anode, la triode étant polarisée par une source
de tension stationnaire f/o .
2. L'intensité ia dépend seulement de la différence ua — yug entre la tension de l'anode et celle ug
de la grille affectée du facteur fixé y . En introduisant l'écart de tension uv = ua — I/q , établir l'équation
différentielle du circuit à laquelle satisfait ia . En explicitant ug , montrer que ia n'est fonction que de
la différence Uq — auv , a étant un facteur que l'on détenninera.
3. Le graphe de la fonction ia{Uq — auv) est donné sur la figure 12.4b. Développer ia jusqu'au
troisième ordre, au voisinage de uv = 0. Que devient l'équation du circuit dans ce voisinage ?
13
Rétroaction.
Application aux asservissements
Nous savons qu'un système est un dispositif physique qui fait correspondre une grandeur de sortie
à une grandeur d'entrée. Ce concept est très général puisqu'on le trouve dans tous les domaines de la
physique, et même en biologie.
i) En électronique, les amplificateurs sont des systèmes qui font correspondre une tension de sortie
à une tension d'entrée ; on définit alors les facteurs amplification en tension, en puissance et en intensité,
rapports des grandeurs de sortie sur celles d'entrée (Fig. 13.1).
Puissance
mécanique
Amplificateur
FIG. 13.1.
u.
Puissance
électrique
to
Fig. 13.2.
ii) En électromécanique, les moteurs électriques sont des systèmes qui réalisent une conversion de
puissance électrique en puissance mécanique ; précisément, la grandeur d'entrée peut être la puissance
électrique d'alimentation du moteur et la grandeur de sortie la puissance mécanique disponible sur
l'arbre du moteur, ou la vitesse de rotation de ce dernier (Fig. 13.2).
iii) En optique, les lentilles font correspondre une répartition de l'amplitude complexe, ou de l'intensité, de l'onde lumineuse dans un plan image, à une répartition de cette même grandeur dans un plan
objet; le grandissement transversal est alors le rapport des extensions spatiales dans les deux plans objet et image (Fig. 13.3).
iv) En thermodynamique, un four peut être considéré comme un système qui fait conespondre une
grandeur de sortie, la température du four, à la grandeur d'entrée, la puissance électrique fournie au
résistor chauffant (Fig. 13.4).
v) En biologie, les organismes vivants sont aussi des systèmes qui fournissent, par l'intermédiaire
du métabolisme interne, une grandeur de sortie, l'énergie nécessaire à la vie de l'organisme (travail pour
ses déplacements, compensation des pertes d'énergie par conduction thermique ou par évaporation, etc.),
à partir d'une grandeur d'entrée, l'énergie apportée par la nutrition des aliments absorbés.
13. Rétroaction. Application aux asservissements
428
ou /,
^0 OU /o
Résister
M
Secteur
Plan objet
Lentille
Plan image
Fig. 13.3.
Puissance
électrique
Four
Fig. 13.4.
Cependant, lorsqu'ils se réduisent à cette seule correspondance, entrée vers sortie, les systèmes
présentent un inconvénient majeur : ils ne prennent pas en compte la valeur effective de la grandeur de
sortie, alors que cette dernière peut ne pas satisfaire aux attentes, soit que le système n'ait pas pu être
totalement maîtrisé lors de sa conception, soit que des actions extérieures indésirables le perturbent de
façon significative.
Il apparaît alors indispensable d'introduire le concept général de rétroaction ou de système bouclé,
notion que nous avons concrètement approchée avec l'amplificateur opérationnel (cf. chapitre 8).
I. —RÉTROACTION
1.1. — Intérêt et nécessité de la rétroaction
Les systèmes physiques envisagés précédemment fournissent en réalité une grandeur de sortie soumise à des contraintes; par exemple, la grandeur de sortie doit être reliée d'une certaine façon à la
grandeur d'entrée, ou bien elle doit avoir une valeur déterminée. On dit que le système est asservi.
Pour réaliser de telles contraintes, on doit d'abord déterminer, grâce à un capteur, ce que fournit
le système, dit actiomeur, lorsqu'il est soumis à une grandeur d'entrée. Compte tenu de l'information
acquise en sortie, il doit ensuite réagir à l'entrée ; cette rétroaction est réalisée à l'aide d'un soustracteur,
lequel effectue la différence entre le signal d'entrée et un signal proportionnel au signal de sortie. On est
ainsi conduit à transformer le système initiai en un système bouclé.
Par exemple, la tension de sortie d'un amplificateur doit être proportionnelle à la tension d'entrée avec un facteur d'amplification en tension déterminé, ou bien elle doit avoir une certaine valeur,
choisie en fonction de la charge à la sortie, même si, accidentellement, la tension d'entrée devient trop
grande. De même, la répartition de l'intensité lumineuse, dans le plan image, doit être proportionnelle
à celle dans le plan objet ; en outre, elle ne doit pas dépasser un certain seuil défini par la sensibilité du
photodétecteur utilisé (cf. Optique). Dans un four, la température ne doit pas excéder une certaine valeur.
1.2. — Systèmes régulés
Lorsque la contrainte d'asservissement consiste à imposer une valeur déterminée à la grandeur de
sortie, quelles que soient les perturbations autres que la grandeur d'entrée, on dit que le système est
régulé.
L'organisme humain est un bel exemple de système régulé : quel que soit l'environnement, désert
chaud ou banquise, la nutrition doit conduire à une température interne du corps voisine de 310 K
(37° C).
Rétroaction. Application aux asservissements
429
Un autre exemple est fourni par le maintien d'une température constante dans un four électrique.
C'est un problème courant et important dans la vie quotidienne, pour des raisons évidentes de sécurité,
mais aussi gastronomiques. Or, une variation accidentelle de la puissance électrique fournie au résister
peut provoquer une forte augmentation de la température, et donc des dégâts. On pallie cet inconvénient
en introduisant une chaîne retour dont le rôle est précisément d'injecter, à l'entrée du système, un signal
directement relié à la différence entre la température T, mesurée par un capteur dans le four, et la
température Tr régulée que l'on souhaite maintenir dans le four. Si 7j — T > 0 , l'intensité du courant
dans le résister est maintenue, voire augmentée, c'est la rétroaction positive ou réaction. En revanche,
si TV — T <0, l'intensité du courant dans le résister est abaissée, voire annulée, c'est la rétroaction
négative ou contre-réaction.
Le remplissage d'un réservoir d'eau, jusqu'à une hauteur donnée fournit un troisième exemple ; la
figure 13.5 montre comment, une fois la hauteur d'eau atteinte dans le réservoir, on interrompt l'alimentation en eau grâce à un flotteur. En soulevant le clapet, on évacue l'eau. Ce système est celui couramment utilisé dans les chasses d'eau.
Régulateur
Flotte
Fig. 13.5.
Fig. 13.6.
Enfin, exemple historique, le régulateur de Watt est un système articulé, constitué principalement
de deux masselottes, qui tourne autour de son axe de révolution, sous l'action d'un moteur thennique ou
d'un moteur électrique (Fig. 13.6). Lorsque la puissance délivrée par le moteur est trop élevée, la vitesse
de rotation du régulateur augmente et les masselottes s'écartent de l'axe de rotation, en soulevant un
collet qui coulisse le long de l'axe de rotation. En se déplaçant, ce dernier provoque une diminution de
la puissance fournie, ce qui entraîne un ralentissement de la rotation et donc une retombée du collet. Ce
dernier entraîne une tige dont l'extrémité fait varier la tension d'alimentation d'un moteur à courant
continu, grâce à un montage potentiométrique. Nous étudierons plus en détail ce dispositif comme
exemple mécanique d'asservissement.
1.3. — Schéma synoptique d'un système linéaire avec rétroaction positive
Les fonctions des dispositifs précédents peuvent être résumées par une même représentation symbolique, appelée schéma synoptique ou schéma-bloc (Fig. 13.7) : Kd est le rapport entre la grandeur
de sortie s et celle d'entrée e dans la chaîne directe, Kr est le rapport analogue dans la chaîne retour entre le signal retour r et 5. À l'entrée, s'ajoute donc, au signal d'entrée initial e, le signal r
issue de la chaîne retour, d'où le signal de rétroaction positive ur_p :
iir p = e
r
avec
r = Kr s
et
s = K(j ii^p
Lorsque le système est linéaire, K(i est indépendant de ur^p et K, est indépendant de s .
430
13. Rétroaction. Application aux asservissements
Remarque : Toutes les grandeurs considérées peuvent être complexes. Cependant, dans la suite, nous
n'alourdirons pas l'écriture en soulignant les lettres qui les représentent.
e+r
—>-—
Kd
Entrée
A
L
Sortie
Kr
FIG. 13.7.
a) Facteur d'amplification en boucle fermée
On déduit de ce qui précède :
s = K(i{e A- Kr s)
soit
^=
Kd
l-KdKr
d'où le rapport Kf = s/e, appelé facteur d'amplification en boucle fermée :
Kd
Kf =
1 - KdKr
b) Facteur d'amplification en boucle ouverte
Notons que le produit KdKr est le rapport entre l'entrée et le signal retour, lorsque la boucle est
ouverte. En effet, on a alors :
r = K, s
s = Kde
d'où
r = Kr Kd e
soit
r — Koe
K0 = KrKd
étant le facteur d'amplification en boucle ouverte.
c) Cas particuliers
Deux cas particuliers importants, car fréquents, méritent d'être soulignés.
i) \K0\ = \KdKr\ » 1
On a, alors :
Kd
.
e
KdKr
'
01
s
^
1
Kr
Ce dernier résultat est très intéressant, car il montre que l'on peut s'affranchir aisément des imperfections de la chaîne directe en imposant la condition facile à réaliser \Kr\
\Kd\~] . En outre, on
voit que cette condition suggère un moyen de réaliser un filtre inverse, caractérisé par la fonction de
transfert K~x ; un tel filtre permet en effet de compenser le rôle d'un filtre de fonction de transfert
Kr.
ii) \KdKr\ = 1 : Kf est alors infini
Physiquement, cela suppose que le système est capable de fournir un signal fini à sa sortie, en l'absence de signal à l'entrée, c'est-à-dire sous l'effet d'une simple fluctuation ; le système se comporte
alors en oscillateur. De tels systèmes seront étudiés en détail ultérieurement (cf. chapitre 14).
431
Rétroaction. Application aux asservissements
Remarques : 1) Le produit K^K,- n'a aucune dimension physique. Cela implique, soit que Kd et K,
n'aient pas séparément de dimension physique, ce qui est le cas lorsque les grandeurs
d'entrée et de sortie sont de même nature, soit que Kj et K, aient des dimensions physiques inverses. Dans la première hypothèse, Kd est le facteur d'amplification en chaîne
directe et K, le facteur d'amplification en chaîne retour. Dans la seconde, ces quantités sont des coefficients dimensionnés.
2) Lorsque Kr = \, on dit que le système est à retour unitaire (cf. chapitre 8).
1.4. — Exemple de rétroaction en optique : cavité optique
Un exemple de rétroaction en optique est fourni par les cavités optiques, qui équipent les lasers,
lesquels sont, comme on le sait, des sources lumineuses très intenses et très cohérentes (cf. Optique et
Quant ique).
Une cavité optique est constituée de deux lames de verre, identiques, planes, parallèles, distantes
de e et d'épaisseur négligeable devant e (Fig. 13.8).
l /
! ., in' 'A'
>r\i
r-rra-
h +
Ji
I
1I
I
i
1i1
mt
Fig. 13.8.
On montre que, en raison des multiples réflexions sur les faces en regard des lames, à la sortie de la cavité, dans la direction incidente normale, c'est-à-dire perpendiculaire aux lames, l'amplitude complexe
de l'onde lumineuse a pour expression (cf. Optique) :
T
és =
é
—
I - R exp ixj) —e
avec
T= \—R
R étant le facteur de réflexion en intensité de chaque lame, (f) — (27r/A) x le la différence de phase
entre deux rayons émergents consécutifs et A la longueur d'onde du rayonnement.
Dans l'expression précédente, on voit apparaître, en dehors du facteur T, la formule générale de
la rétroaction, dans laquelle :
Kd = l et Kr = R exp icj)
La relation entre l'amplitude complexe ip' de l'onde, après la première lame, et son amplitude complexe
tp', avant la seconde lame, est en effet la suivante :
£ =
où
Kf = ~
— KdKr
1 — i? exp icp
Or p/ = Ttp et tp = r ip', r étant le facteur de transmission en amplitude complexe de chacune des
lames. II vient donc :
T2
é = T X Kfj X T Ip =
lp
-e
\ — R exp i(p
Comme l'épaisseur des lames est faible, r est réel et positif ; r2 s'identifie alors au facteur de transmission T du flux de chaque lame.
432
13. Rétroaction. Application aux asservissements
II. — RETROACTION NEGATIVE
Très souvent, notamment en électronique, la rétroaction est négative, c'est-à-dire que le signal
retour r est soustrait au signal d'entrée. Les résultats sont analogues aux précédents, mais il faut changer
la fonction de transfert retour Kr par son opposé —K, car, avec une rétroaction négative, on a :
tir,a = e — r
avec
r = Kr s
et
s = Kd urjU
Sur la figure 13.9, on a représenté le schéma synoptique de la rétroaction négative.
e—r
—>—
s
Kd
Entrée
•1
L
Sortie
K,Fig. 13.9.
II. 1. — Facteur d'amplification en boucle fermée
On déduit de ce qui précède :
s = Kd{e — K, s)
soit
s=
Kd
\A-KdKr
d'où le facteur d'amplification en boucle fermée K? = sje :
Kf =
Kd
1 + KdKr
Comme pour la rétroaction positive, K0 = KdKr est le facteur d'amplification en boucle ouverte. De
même, il existe deux cas particuliers importants.
i) \K0\ = \KdKr\
1. On a, alors :
^
1
Kr
ii) Pour KdKr = —] , Kf est infini.
II. 2. — Exemple de l'amplificateur opérationnel non inverseur
Analysons, dans ce contexte général des systèmes à rétroaction négative, l'exemple de l'amplificateur opérationnel non inverseur, en rappelant quelques ordres de grandeur (Fig. 13.10) :
Kd = Aq ^ 106
et
Kr = — =
i?.
R] T R2
avec
R] = 1 kfi
et
Il vient :
K0 - KdKr > 1
d'où
ustt — =
Kr
Ri
^R2 - 11
Rj = 10 kO
Rétroaction. Application aux asservissements
433
oo
Us
7777
7777
Ri
Fig. 13.10.
II. 3. — Sensibilité aux perturbations de la chaîne directe et de la chaîne retour
a) Influence des facteurs d'amplification
À partir de la relation générale donnant la tension de sortie lis en fonction de la tension d'entrée ue ,
étudions d'abord l'influence sur la sortie d'une variation du facteur d'amplification de la chaîne directe.
Pour cela, prenons le logarithme népérien de l'expression de us, en fonction de ue, et différentions
In Us par rapport à Kj . Il vient :
In «c = In
Kd
Ka
m* ) = In
+ In M,
d'où
dus
1 + KdKr
1 + KdKr
dKd
d{l+KdKr]
Kd
1 + KdKr
Il en résulte :
dMc
àKd /
1 -
KdKr
dK,
1 + KdKr
Kd
1
\\+KdKr
On voit, qu'en choisissant \KdKr\
1 , on diminue très sensiblement l'influence d'une perturbation du
facteur d'amplification de la chaîne directe. Par exemple, pour KdKr = 999 les variations relatives de
Kd sont divisées par 1000. De même, avec un montage non inverseur, pour lequel KdKr ~ 10' , une
perturbation relative de 10% de Kd ne se traduit que par une variation relative de 10 6 du signal de
sortie.
En revanche, il n'en est pas de même pour une perturbation de la chaîne retour. En effet, il vient,
en différendant le logarithme de iis par rapport à K, :
TJ
O
c
û
(M
O
("Ni
©
.S1
CL
o
u
dus
d{\+KdKr]
Us
1 + KdKr
KdKr
\ d Kr
\+KdKrl
dK,
Kr
Kr
si
KdKr > 1
Les perturbations relatives du facteur d'amplification de la chaîne retour se répercutent directement sur
le signal de sortie.
b) Influence d'une perturbation extérieure
Si un signal extérieur perturbe, de façon additive, la chaîne directe, les équations de base s'écrivent :
e = iie — ur
avec
ur = Krus
et
us = Kd€ + iip
iip désignant la perturbation additive de la chaîne directe. On en déduit :
Us = Kd(Ue — Krus) + llp
d'où
us =
Kd
1 + KdKr
,
1
1 + KdKr
434
13. Rétroaction. Application aux asservissements
Pour \K(,Kr\
1 , on obtient :
Kr
KdKr "
Kr
Ainsi, la perturbation additive, en chaîne directe, est fortement atténuée par la rétroaction.
En revanche, comme précédemment, une telle perturbation en chaîne retour jouerait un rôle non
négligeable. En effet, les équations donneraient alors :
€ = ue — ur
avec
ur = Kr us + Upir
et
us = Kj e
uPp. désignant la perturbation additive de la chaîne retour. Il en résulte :
us = Kd{ue — K, iis — uPj )
d'où
iis = —
+ KdKr
e
X+KjEr
ce qui donne, pour \KdK,.\ >■ 1 :
Us ~ p, {Ue
Upj/
Il. 4. — Fonctions de transfert des systèmes bouclés
L'étude précédente concernait des signaux stationnaires, c'est-à-dire indépendants du temps, ou
des signaux non stationnaires pour lesquels les facteurs Kd et Kr étaient des constantes. Or, avec les
systèmes linéaires, qui sont les plus utilisés, les résultats obtenus peuvent être étendus aux signaux
quelconques, grâce à l'analyse harmonique (cf. annexe 2).
a) Fonctions de transfert harmonique
Remplaçons, dans la relation générale entre l'entrée et la sortie, les grandeurs physiques qui dépendent du temps, par leurs expressions sinusoïdales. Il vient, en désignant par 'ue{f) et
respectivement les amplitudes complexes des signaux sinusoïdaux, de fréquence / ( « se lit u chapeau) :
21.(f)exp(/2^,) =
TT^L_2,(nexp(/2T/,)
d'où
^
en simplifiant. Les coefficients précédents Kd et Kr sont remplacés par des fonctions de la fréquence,
Kdif) et Kr{f), qui sont les fonctions de transfert harmonique de la chaîne directe et de la chaîne retour.
La fonction de transfert harmonique globale du système en boucle fermée, Kfif) = m5 {/)/»<,(/), a donc
pour expression :
/r m
f[J)
=
K
^)
i+Kd(f)Kr(f)
Comme précédemment, le produit Kd(f)Kr(f) des fonctions de transfert directe et retour est la fonction
de transfert en boucle ouverte K0(f) :
Ko(f) = Kr(f)Kd(f)
Pour
>• 1, la fonction de transfert du système bouclé se réduit à : Kf(f) « Kf](f). On voit
ainsi comment on peut réaliser en électronique la fonction de transfert inverse d'une fonction de transfert
donnée, d'où l'importance de la condition \Ku(f)\
1 .
Rétroaction. Application aux asservissements
435
b) Systèmes bouclés constitués d'un filtre passif du premier ordre
Analysons l'influence d'une chaîne retour de fonction de transfert Kr(f ) = K, = Cte indépendante
de la fréquence, sur un filtre passif passe-bas de fonction transfert Kd(f) — T(f) :
1(0)
T(f) =
avec
7(0) = 1
1 +jf/f
La fonction de transfert du système en boucle fermée est alors :
1
1
KM
Kr+\IKd(f)
Kr+{\+jflfc)IKM
KMKr + \+jflfc
Kd(f)
Kfif) = Y
Kd(f)Kr
ce qui s'écrit aussi :
et
fc.r=fc[l+KMKr]
On voit ainsi que la fonction de transfert du système bouclé se présente sous la forme du produit de sa
fonction de transfert stationnaire (pour / = 0 ) par une fonction de transfert analogue à celle du filtre,
mais dont la fréquence de coupure est augmentée.
Notons que le produit du facteur d'amplification stationnaire par la fréquence de coupure est indépendant de la fonction de transfert retour K, :
KMfcr = YTÉmk/^
+
d où
K
f^f" =
'
Ainsi, une rétroaction négative permet d'augmenter la bande passante des systèmes du premier ordre.
Exemple : la figure 13.11 illustre l'influence du bouclage d'un filtre passif passe-bas, type RC de
fréquence de coupure fc = \ j{IttRC) (Fig. 13.11a), par un simple pont diviseur constitué de deux résistors (Fig. 13.11b); Kr s'exprime alors sans difficulté en fonction des résistances R\ et Ri associées, selon : Kr = R2l{R\ + Ro) ■ Les AO montés en suiveurs adaptent les impédances entre les deux
chaînes passives.
S\ R\ = 5 kfi et /?2 = 10 kLl, alors Kr = 2/3 ; comme KfiO) = 1 , la fréquence de coupure est
multipliée par 5/3 , alors que le facteur Kf{0) est, lui, divisé par 5/3 .
E
■a
o
c
û
CM
O
(M
©
4—J
sz 1
.5
>
D.
O
U
R
R
ut
S
T.
P
Ue
c
7777
7777
x
O00
c
x
a)
1
b)
7777
Fig. 13.11.
c) Systèmes bouclés constitués d'un filtre actif du premier ordre
Avec un filtre actif du premier ordre (cf. chapitre 10), les résultats sont analogues, mais le gain
en puissance peut être supérieur à l'unité. On trouve, pour une valeur constante K, de la fonction de
transfert de la chaîne retour :
Kf(f) =
1
^(0)
Kr + l/Kd(f)
1 + KrKd(0) +jf/fc
puisque
Kd(f) =
Kdi0)
1 +jf/fc
13. Rétroaction. Application aux asservissements
436
Il vient donc :
^(0)
m
Kf{0)
^
avec
T^mr
On a bien, ici aussi, conservation du produit de la fonction de transfert par la fréquence de coupure :
K
Am,r =
ï +
K^O)KMfcl}
+
d 0Ù
Kf{0)fc r = Kd{0)fc
'
-
Comme |/^ ^(0)| peut être très grand devant I , la rétroaction sur les systèmes actifs du premier ordre
permet d'augmenter considérablement la bande passante.
Exemple : Si Kj-K^Q) = 999, la fréquence de coupure est multipliée par 1 000 !
III. _ ANALYSE EN ELECTRONIQUE ET EN AUTOMATIQUE
III. 1, — Fonctions de transfert d'un système en électronique
En électronique et en automatique, on s'intéresse, non seulement aux régimes harmoniques établis
dans les circuits, mais aussi aux régimes transitoires, lesquels peuvent être mis sous la forme caractéristique suivante :
A exp(û'/) exp(Jojt) — A exp{pt)
avec
p = a A- jco
On voit que l'amplitude A exp(a'r) d'un tel signal augmente pour a > 0 et diminue pour a < 0 ; elle
est constante et vaut A , pour a; = 0, c'est-à-dire lorsque le signal est harmonique.
En outre, dans ces domaines, la linéarité des systèmes s'explicite par une équation différentielle
linéaire, reliant le signal de sortie s{t) au signal d'entrée e{t), dont la forme générale est la suivante :
dks
at
dt*
dk'~ls
+
71
dr^ "
. ,
+
ao
'"
d!~le
d'e
=
'd?
+
. .
t
e
d^i" + ' ' '
(')
les coefficients ai et
étant des constantes. En appliquant la transformée de Laplace aux deux
membres de l'équation précédente (cf. annexe 3), on trouve, si E{p) de S{p} désignent les transformées de Laplace de e{t) et s{t) respectivement :
{ao +pa\+ p2a2 A
f pkak) S{p) = (bo + ph[ A-p2b2 A
h plbi) E{p)
d'où \a fonction de transfert électronique H{p) :
H{
) P
_
E(jj)
ho +
+ • • • + p1^
ao A-pai A p a2 H
+ pkak
2
Exemple : on sait, que dans un amplificateur opérationnel fonctionnant en boucle ouverte, la tension
de sortie us satisfait à l'équation différentielle .suivante (cf. chapitre 8) :
d us
t0—
h us = AqC
dt
dans laquelle t0 est une durée caractéristique de l'établissement de la valeur Aoe en boucle ouverte.
En cherchant des solutions de la forme exp(p/), avec p = a + jto, on obtient :
(1 + pT0) S{p) = Au E{p)
d'où
Hp =
E{p)
1 A-pTc
437
Rétroaction. Application aux asservissements
La solution de l'équation différentielle précédente est bien connue (cf. chapitres 4 et 8) :
us[t) = Aq€ + Cte x exp ( — — )
\ ToJ
soit
us(t) = Aq€ 1 — exp ( — — )
L
\ ToJ.
si l'on tient compte de sa valeur nulle à l'instant initial. Dans un tel système, en boucle ouverte, la
tension de sortie prend deux valeurs symétriques Usa, ou —Usai, selon la valeur de e autour de 0 ; en
effet, comme le facteur d'amplification en boucle ouverte Aq est de l'ordre de 106 , on a :
soit
-15jjlV<€< 15|xV
si
Usa! = 15 jjlV
ce qui rend le système très sensible à une perturbation infime en entrée.
III. 2. — Fonction de transfert harmonique d'un système en électronique
On retrouve l'analyse harmonique en remplaçant p par j(o , dans l'expression de H{p) . On obtient
alors la fonction de transfert harmonique :
HQOJ) -
hp + (j<n)b\ + (/V)2/?2 + ■■■ + (J(o)lh!
ao + (jù))a\ + (/<y)2<32 + ... + (J(o)kak
que l'on explicite généralement selon :
H(Jù)) = \H(jco)\exp\j(l?((o)]
La quantité 20\g\H(jco)\ représente le gain en dB et ^ la phase en radian.
in. 3. — Fonction de transfert d'un système bouclé en électronique
On obtient la fonction de transfert Hf(p) d'un système bouclé, telle qu'elle est utilisée en électronique et en automatique, en remplaçant, dans les expressions générales, K^(f) et Kr[f) par H^Qy) et
Hr{p) respectivement, ce qui donne ;
Hf
^
=
1 +Hd{p)H,lj>)
=
HAp)
TThjJ>)
où
est la fonction de transfert en boucle ouverte.
Reprenons l'exemple déjà étudié de l'AO non inverseur dans lequel iie = E (Fig. 13.10). Comme
le montre la figure, une partie de la tension de sortie us est réinjectée à l'entrée du système. L'équation
différentielle à laquelle satisfait us devient :
Tc-r1 + Us = AQ { E -
Ri + /?2
us 1
puisque
e=E—
Ri + Ri
l'intensité du courant entrant dans l'AO, par la borne non inverseuse, étant pratiquement nulle. Il en
résulte :
dus
iis _ AqE
_
Tc
dt
+
rC!r ~
tc
aVeC
Tc r
' " 1 + AoR] /{R\ + Rz)
13. Rétroaction. Application aux asservissements
438
ce qui donne, en intégrant, comme précédemment ;
is(t) =
_
I -exp(- — ^\
V TcJ
Au bout d'une durée de quelques valeurs de tc , la tension de sortie est donc :
^
^ r.R^A-Rl
Us{t¥A0E-~*E—
.
.ont
Us
/?] + i?2
-É = ^r
Comme :
Hr=
R
' R1+R2
et
Hd=^1 + pro
on a Hr -C Ha, d'où :
JJ / s
TI-\/ \
^1+^2
Hfip) ~ Hr (p) =
—
-,
+
Rl
IV. — STABILITÉ DES SYSTÈMES À RÉTROACTION NÉGATIVE
La stabilité des systèmes électriques quelconques est définie comme celle de tout système physique : un système est stable s'il ne s'écarte pas de sa position d'équilibre ou reste confirmé dans son
voisinage, lorsqu'il en est occasionnellement écarté. Cette définition est illustrée simplement, en mécanique, par un pendule pesant que l'on écarte de sa position d'équilibre stable, pour laquelle l'énergie
potentielle de pesanteur est minimale, et qui revient à cette position après quelques oscillations amorties, en raison des forces de frottement (cf. Mécanique). Un exemple analogue en électrocinétique est le
circuit RLC, dont le condensateur possède initialement une charge électrique ; au cours du temps, cette
charge s'écoule dans le circuit, en oscillant avec amortissement, en raison des effets dissipatifs dans le
résistor, jusqu'à la décharge complète du condensateur (cf. chapitre 3).
IV. 1. — Condition de stabilité des systèmes à rétroaction négative
Rappelons l'expression de la fonction de transfert des systèmes bouclés, à rétroaction négative :
=
soit
H {P) =
'
I,
W)
W =
1
+ ^WH'-W
Si l'on désigne par {/?/} l'ensemble des n valeurs de p pour lesquelles V{p) = 0, appelées pôles de
Hf{p), et si l'on factorise le dénominateur T){p), alors on peut mettre Hf{p) sous la forme suivante :
«M =
(p-p\){p-pi) ■■■{?-?„)
Appliquons à l'entrée du système une excitation e{t), ayant la forme d'une impulsion, de faible durée
r et de hauteur Ao/r, Aq étant une constante dimensionnelle. Cette excitation s'exprime aisément en
fonction de l'échelon Y{t) :
<') = y [YW -
- r)]
La transformée de Laplace S{p) du signal de sortie s{t) a donc pour expression (cf. annexe 3) :
S(p) =
=
Hd{p)
- E(p)
{P-P\){p-P2)---{P-Pn)
avec
E(j,) =
T
J?
ex
P^T)
p
_
Rétroaction. Application aux asservissements
439
Comme r est supposé suffisamment faible, E{p) devient:
E<
KP) = —I1 ~
ex
P(-PT)] ~ ^I1 - (! +P'r)]
Par conséquent :
S(p) =^o
{p - Pi)(p - Pl) • • ■ (p - Pn)
ce qui s'écrit, après décomposition en éléments simples, en supposant qu'il n'y ait pas de pôles multiples :
0/r
S{p)
— Aq
a
P-P\
i
1
^2
e>
,
,
h•••H
P — Pl
"
P-Pn.
On en déduit le signal s{t) en prenant la transfonnation inverse de Laplace :
s{t) = Aq [D] exp(/?ir) 4- D2 exp(/?2t)
Dn exp(p,(r)]
Comme les pôles sont a priori complexes, le signal de sortie s{[), après excitation, ne tend vers 0 que
si toutes les valeurs pi sont à partie réelle négative. En effet :
si
pi = a, A- j(t)i
avec
ai < 0
alors les facteurs exp(cqr) = exp(—feront décroître, au cours du temps, chacun des tenues formant le signal. Notons que les solutions complexes sont conjuguées deux à deux, car les termes complexes doivent se combiner pour donner des termes réels d'oscillation ou de non-oscillation (cf. chapitre 3).
Sur la figure 13.12, on a représenté, dans le plan complexe de p, différents cas.
a) Le pôle est réel négatif: le système est stable.
b) 11 y a deux pôles complexes conjugués dont la partie réelle est négative : le système est oscillatoire stable.
c) Les deux pôles complexes conjugués sont situés sur l'axe des imaginaires : le système zsi purement oscillatoire.
d) Avec un seul pôle réel positif: le système est instable.
e) Avec deux pôles conjugués, de partie réelle positive : le système est oscillatoire instable.
Très souvent, on cherche à réaliser la stabilité de tels systèmes. Aussi éioigne-t-on les pôles de
la zone interdite, qui est le demi-plan complexe défini par Re(p) > 0, en introduisant une marge de
stabilité :
a; < «0
avec
ao < 0
La marge de stabilité est évidemment d'autant plus grande que cro négatif s'éloigne de 0
440
13. Rétroaction. Application aux asservissements
iS{t)
y
——
s(ty
i ' si t)
<r\\ \
t
v
iv)
■»
i)
?1 / /
\é
^f
î
\) l
v)
■
Re{p}
5(0
«')
FIG. 13.12.
IV. 2. — Critère algébrique de stabilité
Un critère algébrique de stabilité a été établi au XIXe siècle par le mathématicien britannique
E. Routh; il s'appuie sur le signe des coefficients aj du développement polynomial du dénominateur T>(p) de la fonction de transfert en fonction de p :
V{p) = ao
a\ p A- a^ p2 H
h an pn
L'analyse est complexe, sauf dans le cas des systèmes du premier et du deuxième ordre.
a) Systèmes du premier ordre
Lorsque la décomposition du dénominateur Vip) en éléments simples est du premier ordre, il
n'existe qu'un seul pôle {n = 1 ) ; 'T){p) se met sous la forme :
T>{p) = oq A- a\p
d'où
p\ = —
OQ
a\
On voit que si a® et ai sont de même signe, le pôle p\ est réel et négatif, et le système stable. On
choisit généralement ces coefficients positifs, en changeant éventuellement le signe du numérateur de la
fonction de transfert. Ainsi, les systèmes du premier ordre sont-ils stables si :
ai > 0
quel que soit
i
b) Systèmes du deuxième ordre
Pour un système du deuxième ordre, T>{p) a pour expression :
V{p) = ao + a\p A- «2p2
Pour que le système soit stable, il faut que toutes les racines de ce trinôme du deuxième degré aient des
parties réelles négatives. Comme ces racines ont pour expression :
-a\ ± {a] - 4aoa2)1/2
P =
trois cas se présentent :
2^2
441
Rétroaction. Application aux asservissements
i) ai < 4^0 «2 :
rj r 1
Û1
r, J
2 \ '/^
0«2 -«1
4â
a- • /
si aç,, ai et <22 sont de meme signe.
ii) a] = AoqOj :
Rel;?} = Re ^ ici aussi, pour vu que ao , a\ et <32 soient de meme signe.
iii) a\ >
2 :
a\ — 4ao ai
2ai
si la somme et le produit des racines satisfont aux inégalités :
^<0
et
^>0
Cela implique que, la encore, «o , a\ et 02 soient de meme signe.
En résumé, un système du deuxième ordre est stable si :
ai > 0
quel que soit
i
c) Systèmes du troisième ordre
Pour les systèmes d'ordre égal ou supérieur à trois, l'analyse est techniquement plus compliquée
et son développement présente peu d'intérêt. Retenons seulement le résultat sur les coefficients du développement de î^(p), relatif au système du troisième ordre (n = 3).
Pour qu'un tel système soit stable, les coefficients {c/, } du développement polynomial du dénominateur 22(p) de la fonction de transfert :
22(j?) = ao -\~ ci] p 3- aip~ 3- a?, p^
doivent satisfaire aux conditions suivantes :
ai > 0
T3
O
C
o
OJ
quel que soit
i
et
a 1 <22 — <20^3 > 0
IV. 3. — Critère géométrique de stabilité de Nyquist
On peut aussi analyser la stabilité d'un système en étudiant la fonction de transfert en boucle
ouverte Hoijco) = Hd{J(n)Hr{jù}), obtenue en imposant à la variable p la valeur imaginaire jco. Le
critère de Nyquist s'appuie précisément sur le tracé de la courbe C0(ù)) dans le plan complexe : pour
chaque valeur de (o, on porte en abscisse la partie réelle de H0(jù)) et en ordonnée sa partie imaginaire ;
on obtient alors le diagramme de Nyquist, soit théoriquement à l'aide de la mise en équation du système,
soit expérimentalement en envoyant à l'entrée du système, en boucle ouverte, un signal sinusoïdal, de
pulsation oj , et en mesurant la réponse correspondante, à la fois en module et en phase.
Rappelons que les pôles sont définis par l'équation :
1 + H0{jo)) = 1 + Hd{jo))Hr{j(o) = 0
soit
Hn{jù)) = Hd{jù))Hr{jo)) = -1
On est ainsi conduit à tracer, en coordonnées polaires, le module et l'argument de H0{j(o), et à comparer
les valeurs prises par H0(joj) à la valeur critique —1 .
442
13. Rétroaction. Application aux asservissements
s
a) Enoncé du critère de stabilité de Nyquist
À l'aide du théorème de Cauchy, selon lequel le nombre de zéros et de pôles d'une fonction complexe F{j(o) est égal au nombre de fois que l'on décrit la courbe fermée jr, tracée dans le plan complexe, à partir de la partie réelle de Fijoy) et de sa partie imaginaire, lorsque (o varie, Nyquist a établi
le critère géométrique suivant de stabilité d'un système bouclé :
Un système bouclé est stable, si la courbe C0 représentant, dans le plan complexe, la fonction de
transfert en boucle ouverte, H0{jo}), parcourue de co = — oo à w = oo, entoure le point critique
C, de coordonnées —1,0, dans le sens directe, autant de fois que H0{jco) présente de pôles instables,
c'est-à-dire de pôles à partie réelle positive.
b) Critère simplifié de Nyquist ou critère du revers
Lorsque H0(jco) ne présente pas de pôles instables, ce qui est très fréquent, la condition nécessaire
et suffisante de stabilité est que la courbe C0 n 'entoure pas le point critique C. Plus précisément,
C doit être situé à gauche de cette courbe, quand on la parcourt en faisant varier w de — oo à oo
(Fig. 13.13).
Im {Hoijoj)}
C "1,0
1
oj = oo
M
a> = 0
AB Re {Ho{j(o)}
Co
FIG. 13.13.
Remarque : En raison des fluctuations ou du nécessaire régime transitoire, on adopte une marge suffisante, en maintenant le point figuratif M, sur la courbe C0 , suffisamment éloigné de
C ; la marge prise est souvent égale à 15 dB pour le module de H0{jo)) et 77/4 pour sa
phase.
c
fM
o
(N
Exemple : un amplificateur passe-bas se comporte comme un système bouclé qui admet pour fonctions de transfert directe et retour les expressions suivantes :
Hd(p)=
SI
U}
"io
u
1
f
+ P/ Me
et
Hr{p)=B
A eX B étant deux constantes. Sa fonction de transfert en boucle ouverte est donc :
AB
H
<M = Hd{p)Hr{jf) =
1 + p/wc
Analysons le système en régime établi, en faisant p — jto . On trouve :
Ho(Jm} =
AB
,
- \H0{Jù)}\exp[i(f)[ù))\
1 + JCO/û)c
avec
\H0{(o}\ =
AB
—, , 2M/2
(1 + CO-fû)*)1'1
et
tan 0 =
co
(Oc
Rétroaction. Application aux asservissements
443
Comme le pôle de H0{p) a une valeur réelle négative {p — —o)c ), le système ne présente pas de pôle
instable. Établissons l'équation polaire du diagramme de Nyquist. Si M désigne un point du diagramme,
on a :
AB
= (1+^2^)1/2 =AB\cos<l>\ = |//„(0)| Icos^l
OM
Comme OM = \H0\ = AB pour w = 0 , et OM = 0 pour co infini, le diagramme de Nyquist correspondant est un demi-cercle, de rayon AB/2, dont le centre a pour coordonnées AB/2 et 0 (Fig. 13.13).
Le point critique C, de coordonnées — 1 et 0, étant situé à gauche de la courbe, le système est stable.
IV. 4. — La rétroaction comme moyen de réaliser la stabilité
Montrons, sur l'exemple simple d'un amplificateur opérationnel, que la rétroaction constitue un
moyen de réaliser la stabilité d'un système instable. On a vu que la fonction de transfert directe d'un
AO, en boucle ouverte, avait pour expression (cf. chapitre 8) :
1
HAp)=Ao
1 + Pri
Aq étant le facteur d'amplification en tension à /? = 0 et tc une durée caractéristique. Ce système est
stable puisque le pôle p = —\jrc est réel et négatif.
À l'aide d'une chaîne retour sur la borne non inverseuse, constituée d'un point diviseur
(Fig. 13.14a), on obtient un système bouclé, à rétroaction positive, dont la fonction de transfert a pour
expression :
Hd{p)
Hf{p)=
avec
"r{p) = HrtP = -
r2
La fonction de transfert retour, qui est sans dimension, traduit un taux de rétroaction positive. Il vient
donc :
1
H
f(p) =
puisque Aq
1
l/^C/(p)
l/Aq
1
pTc/Aq
Hr.p
P"?c,r
A
^r,p
1. Comme le pôle de la fonction de transfert est réel positif, le système est instable.
Ra
F.
Ri
Ri
777/
Ri
7777
7777
a)
b)
FIG. 13.14.
7777
444
13. Rétroaction. Application aux asservissements
Modifions la chaîne retour en introduisant une rétroaction négative, à l'aide d'un second pont diviseur fonué de deux résistors (Fig. 13.14b). L'expression de la nouvelle fonction de transfert, en boucle
fermée, s'obtient à partir de l'équation différentielle à laquelle satisfait l'AO :
ttej R3 + us/^4
^
\/R3 + \/R4
-p lls — A()£ — AQ ^r,p tls
—Aq{Hi^p
Aq
R3 +
avec HrM = ^3/(^3 + ^4), équation que l'on établit en appliquant le théorème de Millman à l'entrée
inverseuse F. Il vient, puisque Aq » 1 :
T
càus ,
A<1it+{r'"
R
o
\ _
Hr
^Us-
*
Ri + rP'
On en déduit, en introduisant tC),- = tc/Ao :
{ptc.r + Hrj, - Hr,P)lls =
. D ^
D
K3 + K4
& OÙ
Hf{p)
R3 + /?4 \prCp. + Hrp — Hr4
Ainsi, la fonction de transfert précédente est modifiée, d'abord par l'introduction d'un facteur d'amplification en tension égal à —R^/[R3 4- ^4), ensuite par le remplacement de
par :
Hr.p
fir,n —
R\ -\- Rl
R3 F RA
Le système peut devenir stable, puisque p est réel négatif si Hr<p < H,- ,, . C'est bien ce que l'on met
en évidence avec un AO 741 et les valeurs suivantes des résistances :
R] = 4,7 kfi
R2 = l0kn
R3 = R4 = 4,1 kù
Les taux de rétroaction positive et négative valent alors : Hr p = 0.32 et Hr n = 0,5.
Remarque : Évidemment, en faisant R2 infini dans l'expression précédente, on retrouve le facteur
d'amplification du montage inverseur. En imposant Hrp = 0 et TCjr = 0 ; on trouve
bien ;
R
rr / \
4
1
^4
/?3+/?4 Hr,,
/?3
V. — RÉALISATION DE LA RÉTROACTION NÉGATIVE
o
En électronique, les grandeurs d'entrée et de sortie sont généralement des tensions entre deux points
d'un circuit, ou des intensités de courants qui parcourent les conducteurs ohmiques. Nous nous proposons ici de préciser, à l'aide de montages simples connus comportant des amplificateurs opérationnels
(cf. chapitre 8), le mode de réalisation de la connexion entre les chaînes directe et retour.
>
D.
V. 1. — Différents types de rétroaction
Dans un système bouclé, la connexion entre la chaîne retour et la chaîne directe doit faire apparaître la différence des signaux d'entrée et retour. Comme ces signaux peuvent être des tensions ou des
courants, il existe quatre types différents de rétroaction :
î) type tension-tension iie/us, à la base des amplificateurs en tension,
ii) type courant-tension ie/us, sur lequel fonctionnent les convertisseurs courant-tension.
445
Rétroaction. Application aux asservissements
iii) type tension-courant ue/is, que l'on peut utiliser pour réaliser une source de courant commandée par une source de tension,
iv) type courant-courant ie/is qui se comporte comme un amplificateur de courant.
Dans la suite, nous n'analyserons que les deux premiers types de rétroaction, car ils sont les plus
utilisés.
V. 2. — Rétroaction tension-tension
a) Mise en œuvre
La rétroaction tension-tension, qui est la plus fréquente, est celle pour laquelle l'entrée et la sortie
sont toutes deux des tensions, respectivement ue et iis. Il en résulte que la tension à l'entrée, après
rétroaction iir, est la différence :
ce qui implique une connexion en série ; en revanche, en sortie, la connexion est parallèle. Aussi une
telle rétroaction est-elle qualifiée de série-parallèle. Dans l'AO, la tension différentielle ue^ est généralement notée e (cf. chapitre 8).
La figure 13.15a montre, sur l'exemple de l'amplificateur opérationnel non inverseur, le fonctionnement d'une telle rétroaction tension-tension. Sur la figure 13.15b, on a représenté le schéma global
correspondant. Comme 1//^//, |
1, on trouve :
1
u _
Hf
^ —
Hr
avec
„
"r
Hr = — =
Ux
R[ + /?2
+
i ..
e.r
;
Ue.r
Hd
l>
Hd
7777
7777
R2
Ri
Hr
7777
7777
7777
b)
a)
FlG. 13.15.
b) Influence de la rétroaction sur l'impédance d'entrée
D'après le schéma général de la rétroaction négative tension-tension (Fig. 13.15b), l'impédance
d'entrée Z,. ^ de la chaîne directe et celle Zej de la chaîne en boucle fermée ont pour expressions
respectives :
■y
—e,r
. r-,
Ue
.- v
-,
r-, lie
Zetd — .
^
Ze jy — Zej
le
le
r
Or:
Re
Re Us
^ + HdHr
446
13. Rétroaction. Application aux asservissements
Par conséquent :
Zej = Ze>d(l + HrHd) > Ze>d
avec
\HdHr\ » 1
Ainsi, la rétroaction tension-tension augmente considérablement l'impédance d'entrée. À la limite, pour
Hd infini, l'impédance d'entrée est infinie.
V. 3. — Rétroaction courant-tension
a) Mise en œuvre
La rétroaction courant-tension est celle pour laquelle l'entrée est un courant d'intensité ie et la
sortie une tension us. Après rétroaction par un courant d'intensité ir, à l'entrée de PAO le courant a
pour intensité :
le.r —
Ir
ce qui implique une connexion parallèle en entrée ; de même, en sortie, la connexion est parallèle. Aussi
une telle rétroaction est-elle qualifiée de parallèle-parallèle.
Sur la figure 13.16a, on rappelle, en s'appuyant sur l'exemple d'un amplificateur opérationnel
inverseur, le fonctionnement d'une telle rétroaction négative courant-tension ; en b, on a représenté le
schéma global correspondant. Comme \HdHr\
1, on trouve :
Hf zc -~r
Hr
avec
Hr — —
u..
—^r
R
e,r
+
>
——/// « —R
L
i
e
_
d'où
Hd
T*
Us
Hr
7777
7777
7777 7777
7777
b)
a)
Ftg. 13.16.
h) Influence de la rétroaction sur l'impédance d'entrée
D'après le schéma général représentant la rétroaction courant-tension (Fig. 13.16b), l'admittance
d'entrée Yetd de la chaîne directe et celle Ye f de la chaîne en boucle fermée ont pour expressions
respectives :
et
le,r
Yej=l±
h
d'où
Yeif = Yeid^
le,r
le désignant l'intensité du courant à l'entrée et ie r l'intensité du courant après la connexion de la
chaîne retour. On en déduit, en tenant compte de la relation générale i_e/ie r = 1 + HdHr :
Yej
avec
\HdHr\^l
447
Rétroaction. Application aux asservissements
Ainsi, la rétroaction courant-tension diminue considérablement l'impédance d'entrée. À la limite, pour
Hd infini, l'impédance d'entrée est nulle.
VI. — APPLICATIONS PHYSIQUES DES ASSERVISSEMENTS
Les asservissements constituent une application très importante des systèmes bouclés. En effet, très
souvent, on souhaite que l'un des paramètres du système physique considéré ait une valeur fixée : par
exemple la température d'un four, la vitesse de rotation d'un moteur, l'orientation d'une antenne parabolique. Parfois, on est encore plus ambitieux : on veut qu'un paramètre suive des variations imposées,
comme dans une boucle à verrouillage de phase (cf. chapitre 17). Voyons d'abord comment transformer en asservissement un système bouclé.
VI, 1. — Schéma synoptique d'un asservissement
Sur la figure 13.17 qui représente le schéma synoptique d'un asservissement, on distingue aisément
le système linéaire S, de fonction de transfert Ks, qui fournit la grandeur de sortie ^ à asservir. A la
sortie, le signal s est reçu par un capteur, qui renvoie ce signal sur une chaîne retour, de fonction
de transfert Kr. Grâce à un soustracteur, on effectue la différence e — r, laquelle est amplifiée par
un autre système Sa , de fonction de transfert Ka ; le rôle de ce dernier est d'augmenter la précision
de l'asservissement : avec un gain suffisant, l'amplificateur Sa fournit, à l'entrée de é> , un signal
significatif qui correspond à une faible valeur de la différence e — r. On en déduit la fonction de
transfert de la boucle d'asservissement :
Kf = -———
1 + KdKr
avec
Kd = KsKa
Sa
Ka
d'où
Kf =
^
1 + KsKaKr
KK
rï
Kr
FlO. 13.17.
VI. 2. — Exemple mécanique de système asservi : le régulateur à boules
Le régulateur à boules date des années 1780, précisément de l'époque des moulins à vent que
l'on utilisait dans les minoteries. Ce système, mis au point par le britannique T. Mead, pour réguler
la vitesse de rotation des moulins, fut adapté et perfectionné par J. Watt dans les machines à vapeur
(cf. Thermodynamique).
Écrivons l'équation du mouvement de translation du collet, de masse mc, le long de l'axe de
rotation Oz, vertical, descendant, sachant que (Fig. 13.6) :
i) il est relié à un ressort, de raideur K et de longueur à vide /q ,
ii) il subit une force de frottement visqueux, proportionnelle à sa vitesse, d'expression —a\, a
étant le coefficient de Stokes (cf. Mécanique),
iii) il est soumis aussi à la force 0^(11 — Ho) qu'exerce le régulateur sous l'effet d'une augmentation de sa vitesse angulaire fi . Cette force est attribuée à la variation de la force centrifuge, laquelle est
proportionnelle au carré de la vitesse angulaire de rotation. On a donc :
Fr = Kin2 - n^) - /<(fi + OoKo - fio) « crf(fî - fio)
si
a«
13. Rétroaction. Application aux asservissements
448
Il vient, en projetant le théorème du centre de masse, appliqué au collet, sur Oz (cf. Mécanique) :
mcz = -a'z -K{z-k) + mcg + Q(fl - Oo)
Notons que, Taxe étant vertical, on peut remplacer Klo + mcg, par Kl\ , cette nouvelle longueur l\
prenant en compte le poids du collet. En choisissant l'origine O de la coordonnée z de telle sorte que
les tenues constants s'annulent, l'équation différentielle précédente se réduit à l'équation :
C*
z-é — -é oÂz— — fl
T fi
m,.
avec
1
ol
— — —
T.
Mr
= —
lUr
et
Kl\ — C^Ùq — 0
La recherche des solutions en z, de la forme exp(/?r), donne la fonction de transfert directe Hj{p),
entre la vitesse de rotation ù à l'entrée et la coordonnée z à la sortie:
C
f ? , P , 2\
dn
( p~ H
h Wn z =
il
\
Te
J
mc
z
u
Cd/wc
Hd - — = —2
y
n
p + p/Te + «Wq
A' ^
d ou
Quant à la fonction de transfert retour, on la trouve en appliquant le théorème du moment cinétique au
système, en projection sur l'axe de rotation (cf. Mécanique) ; en désignant par I le moment d'inertie du
système, par rapport à l'axe Oz, et en tenant compte d'un couple contrariant —Cr z, dû au déplacement
z du curseur sur le potentiomètre, il vient :
m " -CVz
Il en résulte, en cherchant ici aussi des solutions de la fonne exp(pr) :
r o — —C
rz
Ipil
r
A'
d ou^
n
C
v = —
H
= ——'
r
z
Ip
On en déduit la fonction de transfert en boucle ouverte :
o — Hdti
u —
H
0
r
/ 7 i
t
2\
p{p2+p/Te + 0)$
ave
c
^ _
— Cd
j C,
Imc
Par conséquent le dénominateur V{jj) de la fonction de transfert Hf {p) a pour expression :
\+H0(p) = l~
_ p3 + p2 / T g + pO)l + Cq
Co
P(P2 JrPlTe + toi)
P3 + P2/Te + PC00
Les pôles de Hf{p) sont les zéro de ce polynôme du troisième degré qui s'écrit :
7
T
Q A- a] p A- «2P + a3 P
a
avec
= Cq
7
a\ = ojq
1
02 = —
te
et
a?, = l
On a vu que le critère se stabilité de Routh donnait, à l'ordre 3 :
quel que soit
i
ai >0
et
a\a2 > 0004
soit
ù)1
— > Co
En remplaçant ces grandeurs par leurs expressions respectives, la condition de stabilité s'écrit finalement :
CdCrTe
Rétroaction. Application aux asservissements
449
VI. 3. — Exemple optique de système asservi : l'optique adaptative
On sait que la résolution spatiale d'un grand télescope réflecteur, au sol, est limitée, non par
la diffraction, mais par la turbulence atmosphérique (cf. Optique). La solution de placer un instrument, comme le Télescope Spatial Hubble (HST), sur une orbite terrestre, en dehors de l'atmosphère,
s'avérant très coûteuse, les physiciens ont développé V optique adaptative, c'est-à-dire une technique
consistant à restaurer en temps réel, par rétroaction, la qualité des images détériorées par la turbulence
atmosphérique. Ainsi, les améliorations obtenues par le système ADONIS (ADaptative Optics Near
Infrared System), installé sur le télescope européen de 3,6 m de diamètre, de la Silla au Chili, sont
remarquables : on atteint la résolution ultime imposée par la diffraction. On a récemment installé un système analogue, NAOS (Nasmyth Adaptative Optical System), sur l'un des quatre télescopes européens
du VLT (Very Large Telescope), de 8,2 m de diamètre, installé au mont Paranal au Chili.
Remarque : L'optique adaptative suppose que, dans le champ d'observation astrophysique, il y ait une
étoile suffisamment intense, afin que l'on puisse analyser la surface d'onde optique, à
l'entrée du télescope. Comme ce n'est pas toujours le cas, on envisage de créer des étoiles
artificielles en excitant, à l'aide de faisceaux laser, des atomes de sodium présents dans les
hautes couches de l'atmosphère, à une altitude de 90 km .
Sur la figure 13.18a, on a représenté les différents éléments optiques formant le système bouclé, à
la sortie du miroir principal du télescope. Le signal d'entrée est la fonction d'onde ^ , perturbée par
l'atmosphère, le signal de sortie est le signal d'erreur if/^ ^
^ — ifj^, c'est-à-dire l'écart entre l'entrée
et le signal retour.
Miroir
adaotatif
Onde incidente
Miroir adaptatif
Lame
semi-transparente
—r
Hd
Lentille
Hc
Système
de contrôle
Détecteur
de front d'onde
Compensateur
H0
H,
Calculateur
Détecteur
de front d'onde
Plan image
a)
b)
Fig. 13.18.
La figure 13.18b donne elle un schéma synoptique du système bouclé. En raison de son inertie,
le miroir adaptatif se comporte comme un filtre passe-bas dont la fonction de transfert au repos vaut
pratiquement 1 dans le domaine des fréquences intéressantes. La fonction de transfert de la chaîne
directe est donc //^ = 1. Quant à la chaîne retour, elle est constituée principalement de trois éléments :
i) un premier système analyse le front de l'onde incidente perturbée par la turbulence ; la fonction
de transfert de cet analyseur de front d'onde est :
1 — exp(—pr)
Haip) =
PT
où r désigne la durée nécessaire à l'exécution de l'ensemble de toutes les opérations de boucle, de
l'ordre de 10 ms,
13. Rétroaction. Application aux asservissements
450
ii) un calculateur de front d'onde constitué d'un ordinateur qui, en temps réel, enregistre les informations fournies par la détection physique, les traite et en déduit les modifications géométriques à faire
subir au miroir, afin de neutraliser les effets de la turbulence ; sa fonction de transfert a pour expression :
Hc{p) = exp(—pr)
iii) un compensateur de boucle, chargé, comme son nom l'indique, de compenser tout écart stationnaire de front d'onde et d'améliorer les performances techniques de la boucle, précisément d'élargir la bande passante et d'éviter les zones d'instabilité ; le premier et le plus simple des compensateurs
de boucle a pour fonction de transfert :
C
Hcb{p) = —
avec
C « 40 s-1
La fonction de transfert en boucle fermée est donc :
Hfip)
p2T + C[1 - exp(-pr)] expf-pr)
1 -(- Hch{p)Hc{p)Ha(j?)
En se déformant, le miroir adaptatif doit compenser les perturbations atmosphériques. Par conséquent, sa fonction de transfert doit avoir pour expression :
p1T
= 1 - Hf(p) = 1
_
2
p r -1- C[1 — exp(—pr)] exp(—pr)
C[1 — exp(—pr)] exp(—pr)
2
p r + C[1 — exp(—pr)] exp(—pr)
La compensation des perturbations atmosphériques par la boucle de rétroaction peut être spectaculaire.
Remarque : En réalité, un tel système s'appuie largement sur les avantages du traitement numérique
des données en ligne. Il faut alors ajouter au schéma synoptique précédent un convertisseur analogique-numérique (CAN), placé avant le compensateur, et, après ce dernier,
un convertisseur numérique-analogique (CNA) (cf. chapitre 19). Les fonctions de transfert de ces deux éléments sont respectivement :
1
et
Hr
I - exp(—pr,,)
Pour gérer techniquement l'analyse de tels systèmes numériques, l utilisation de la transformation de Laplace conduit à introduire la transformation en Z que l'on définit comme
U{Z) = V u{nTe)Z~"
dans laquelle n est un entier et Te la période d'échantillonnage, conformément au théorème de Shannon (cf. chapitre 15).
VI. 4. — Exemple quantique de système asservi : le microscope à effet tunnel
a) Fonctionnement d'un microscope à effet tunnel
Le microscope à effet tunnel est constitué de deux électrodes métalliques, une pointe de tungstène
et une surface métallique, dont on souhaite détenniner la structure, entre lesquelles on maintient une
différence de potentiel électrique U. Il date de 1982, année de la publication, par un physicien suisse
Rétroaction. Application aux asservissements
451
>'
Pointe
métallique
Atomes de la pointe
COCCCCOOO Atomes de la surface
Surface analysée
FIG. 13.19.
G. Binnig et ses collaborateurs, d'une image d'une surface de silicium, obtenue à l'aide d'un instrument,
dont le fonctionnement s'appuie sur l'effet tunnel (cf. Quantique). La distance entre les deux électrodes,
de l'ordre du nanomètre, est contrôlée par un élément piézoélectrique (Fig. 13.19).
Un microampèremètre, placé dans le circuit extérieur, permet de détecter un courant d'intensité
/, que l'on attribue au transfert d'électrons dans le vide, d'une électrode à l'autre, par effet tunnel. On
déplace la pointe latéralement devant la surface à analyser, c'est-à-dire parallèlement à cette surface, tout
en maintenant constante l'intensité, ce qui implique un facteur de transmission tunnel constant et donc
une largeur L de la barrière invariable, grâce à un déplacement longitudinal minutieux. On reproduit
ainsi fidèlement les irrégularités de la surface étudiée.
A première vue, l'instrument est simple, mais les espoirs qu'il suscita à ses débuts furent rapidement déconcertants, notamment lorsqu'on découvrit sa grande sensibilité aux dérives mécaniques, thermiques et électriques. Ces problèmes techniques furent précisément résolus grâce à une boucle d'asservissement.
b) Asservissement dans un microscope à effet tunnel
Sur la figure 13.20, on a dessiné le schéma synoptique de la boucle de rétroaction : l'entrée est
constituée par l'intensité Ic du courant tunnel que l'expérimentateur commande en appliquant une
tension déterminée entre la surface à analyser et la pointe. Si l'intensité de ce courant mesurée en sortie
n'est pas Ic mais /, on amplifie la différence /c — 7, laquelle est transformée en une tension qui
s'exerce sur l'élément piézoélectrique ; ce dernier modifie alors la largeur L de la jonction, de telle
sorte que cette différence devienne très faible. La tension de sortie devient alors précisément celle qu'il
convient d'appliquer sur cet élément.
ïr-I
Ampli
Log
Ai
Hr
Au
Hd
Jonction
tunnel
Piézo
FIG. 13.20.
La chaîne directe est constituée de deux éléments, un amplificateur de courant et un amplificateur
de tension ; la fonction de transfert de l'ensemble est de la forme :
Hd = D
(Or
P+
(oc étant une pulsation de coupure et D un facteur constant.
452
13. Rétroaction. Application aux asservissements
La chaîne retour comporte, elle, trois blocs : l'élément piézoélectrique, la jonction tunnel et un
amplificateur logarithmique, dont le rôle est de corriger les effets non linéaires introduits par la jonction
tunnel. Sa fonction de transfert a pour expression :
ù)2p{\ é-p/Tc
Hr(p) = Hr{0)
avec tc — 4 [xs, fp — cûp/(2tt) — 1,1 kHz, Q = o)pTe = 20 ; dans cette expression, //r(0) est
le facteur d'amplification en régime stationnaire. On en déduit alors la fonction de transfert en boucle
fermée selon l'expression générale :
H
f
Hd
\+HdHr
CONCLUSION
Rappelons les points essentiels.
1) La rétroaction est un phénomène général qui joue un rôle essentiel, non seulement en électronique mais aussi en optique et dans d'autres domaines de la science. Elle consiste à injecter, à l'entrée
du système, via une chaîne retour, une partie du signal de sortie, issu de la chaîne directe.
2) Lorsque la rétroaction est positive, la fonction de transfert en boucle fermée a pour expression,
si Kd et K, sont respectivement les fonctions de transfert directe et retour :
où
Kf =
K0 = KdKr
1 - K(lKr
représente la fonction de transfert en boucle ouverte. Un exemple de rétroaction optique est fourni par
l'interféromètre de Fabry-Pérot.
3) Lorsque la rétroaction est négative, comme c'est le cas en électronique et en automatique, la
fonction de transfert en boucle fermée a pour expression, si
et H, sont respectivement les fonctions
de transfert directe et retour :
Hf= .
H
:[ „
HdHr
où
H0 = HdHr
représente la fonction de transfert en boucle ouverte. L'amplificateur opérationnel est l'exemple électronique typique d'une rétroaction.
4) Même avec une rétroaction négative la stabilité des système bouclés n'est pas nécessairement
réalisée. Elle l'est si certaines conditions sont réalisées, d'où les critères de Routh et de Nyquist.
5) La rétroaction débouche naturellement sur les asservissements. De nos jours, avec le développement des outils informatiques, elle est introduite de plus en plus en physique instrumentale, chaque fois
que l'on veut corriger les instruments de leurs imperfections ; l'optique adaptative et le microscope à effet tunnel sont les exemples les plus spectaculaires de l'intérêt de la rétroaction et des asservissements
en physique.
6) Enfin, une application importante de la rétroaction concerne la réalisation des oscillateurs, pour
lesquels la rétroaction est positive ; l'importance du sujet est telle qu'une étude spécifique lui est consacrée (cf. chapitre 14).
Rétroaction. Application aux asservissements
453
EXERCICES ET PROBLEMES
P13- 1. Régulation thermique
On veut réguler la température intérieure T, d'une enceinte que l'on chauffe en lui apportant une
puissance électrique V (Fig. 13.21).
1. En chaîne directe, la relation entre 7) et V est 7) = RUV + Te, Te étant la température
extérieure et Rlt un coefficient.
a) Calculer Ru , en précisant l'unité SI, sachant que, en l'absence de rétroaction, pour V = 2 kW
et Te = 273 K, la température de l'enceinte serait 7) = 293 K. Justifier la notation adoptée pour le
coefficient Ru.
b) Pour quelles variables d'entrée et de sortie de ce système peut-on définir une fonction de transfert
directe K(i ? En déduire alors Kj .
c) Quelle est la variation de température AT, de l'enceinte, lorsque la température à l'extérieur
varie de AT^ = 5 K ?
2. La chaîne de rétroaction est constituée par un capteur de température suivi d'un système de
commande qui fournit une puissance "P,- reliée à 7} par l'équation Vr = G'u{Ti — Te), Tc étant une
température dite de commande et G',, = 1 kW ■ K"1 .
a) Justifier la notation du coefficient G^ . Pour quelles variables d'entrée et de sortie de cette chaîne
retour peut-on définir une fonction de transfert retour K, ? En déduire alors K, .
b) Établir l'expression de 7) en fonction de V . Quelle doit-être la valeur de Tc pour que, lorsque
P = 0 à l'entrée, on ait encore Tt = 293 K ?
c) Quelle est la variation de température AT, de l'enceinte, lorsque la température à l'extérieur
varie de AL = 5 K ? Conclure.
Capteur de température
i
T,
c<
Capteur
de température
7777
Chaîne directe
7777
Ri
Chaîne
retour
Fig. 13.21.
Fig. 13.22.
P13- 2. Rétroaction tension-tension sur un AO non inverseur du premier ordre
L'amplificateur opérationnel non inverseur, représenté sur la figure 13.22, se comporte comme un
filtre linéaire passe-bas, dont le facteur d'amplificateur stationnaire vaut Aq = 5 x 105 et la fréquence
de coupure fc = 20 Hz. Les valeurs des résistances sont respectivement /?i = 1 kfi et /?2 = 9 kfi.
454
13. Rétroaction. Application aux asservissements
1. Donner les expressions de la fonction de transfert directe Hj(j(o) et de la fonction de transfert
retour Hr(Joj).
2. En déduire les fonctions de transfert H0 et Hf , respectivement en boucle ouverte et en boucle
fermée. Tracer les diagrammes de Bode relatifs aux gains correspondants à Hj et à H, , en fonction de
la fréquence.
3. On applique, à l'entrée de l'AO, un échelon de tension, de hauteur E = 15 mV . Trouver Lis{t),
sachant que % = 0 à r = 0.
P13- 3. Rétroaction sur un filtre passif du premier ordre
Sur la figure 13.23a, on a représenté un filtre passif RC .
1. Déterminer sa fonction de transfert H(Jco), ainsi que sa fréquence de coupure fc .
2. On ajoute une rétroaction à l'aide d'un pont diviseur de tension (Fig. 13.23b). Etablir la nouvelle
fonction de transfert.
3. Reprendre la question précédente, avec la rétroaction constituée par l'amplificateur sur la figure 13.23c.
X
R 2
R
Uc
\\\\
RI
Kl
Ko
h
C
ï
-
Us
777/
Ko
a)
FIG. 13.23.
P13- 4. Rétroaction complexe
Un amplificateur réel a une fonction de transfert directe H(j constante et une fonction de rétroaction
complexe Hr{Joj) = 1 /{jù)) .
1. Quelle est l'action caractéristique d'une telle rétroaction ?
2. Déterminer la fonction de transfert hannonique, en boucle fermée, et tracer le diagramme de
Bode relatif à son gain.
3. La rétroaction précédente est remplacée par un quadripôle dont la fonction de transfert a pour
expression :
Hr = Hrp{\ +j(or)
Calculer la nouvelle fonction de transfert, en boucle fermée, et tracer le nouveau diagramme de Bode
relatif à son gain.
P13- 5. Rétroaction tension-tension sur un AO non inverseur du deuxième ordre
L'amplificateur opérationnel non inverseur, représenté sur la figure 13.24, se comporte, avec une
bonne approximation, comme un filtre linéaire passe-bas de deuxième ordre, dont le facteur d'amplification stationnaire vaut Aq = 106 et les deux fréquences de coupure fc,\ = l kHz et fcp = 100 kHz .
Les résistances R] et
valent respectivement 1 kfi et 99 kfl.
Rétroaction. Application aux asservissements
455
1. Donner Texpression de la fonction de transfert directe Hd{jù)). Quelle est, en fonction de R\ et
R2 , la transmittance Hr{jo)) de la chaîne retour?
2. En déduire la fonction de transfert en boucle ouverte. Montrer que la fonction de transfert, en
boucle fermée, peut se mettre sous la forme
«/(H = 7
/V .
1 — (*) ( (L>q + JCOT
Af ,
et r étant des quantités que l'on calculera en précisant leurs unités SI. Tracer le diagramme de
Bode pour Hf.
3. À l'entrée de l'AO, on applique un échelon de tension, de hauteur £ = 10 mV . Établir l'équation différentielle à laquelle satisfait la tension de sortie us ; en déduire us{t), sachant que ws = 0 à
f = 0.
rr
Mt
777T
7777
Ri
Ri
£3
Ri
77
77777777
V
Fie. 13.24.
7777
FlG. 13.25.
P13- 6. Stabilité d'un montage à résistance négative
L'amplificateur, représenté sur la figure 13.25, possède un facteur d'amplification stationnaire
Aq = 5 x 105 et une fréquence de coupure de 10 Hz ; il est caractérisé par la fonction de transfert
suivante en boucle ouverte :
^
=
YTpr
1. Déterminer la fonction de transfert Hf = us/eg du montage ; en déduire la condition sur la
stabilité du montage et donc celle sur la résistance Rg , sachant que R\ = Ri = R3 = \ kfi.
2. Exprimer le rapport Ug/i^ . Quelle est la fonction d'un tel montage ?
P13- 7. Asservissement de la vitesse d'un moteur à courant stationnaire
Dans un asservissement de la vitesse angulaire d'un moteur, la chaîne directe est constituée par le
moteur, précédé d'un amplificateur, de facteur d'amplification A = 10 (Fig. 13.26). Lorsqu'on applique
une tension u, à l'entrée du moteur, sa vitesse angulaire fi satisfait aux deux équations différentielles
suivantes :
dfi
u = Oq fi + Ri et J
= <E>o i
at
i étant l'intensité du courant qui parcourt l'induit du moteur et J le moment d'inertie du moteur par
rapport à son axe de rotation. La chaîne retour est constituée, elle, d'un capteur de vitesse angulaire
fournissant une tension ur proportionnelle à fi : ur = KÇl.
13. Rétroaction. Application aux asservissements
456
1. Quelles sont les significations physiques des deux équations précédentes. En déduire les dimensions physiques de J, d>o , K et t = RJ/Qq ? Dans la suite, on prendra pour ces quantités les valeurs
SI suivantes : <î>o = 2, R = S , J = 25 x 10~3, K = 3 et A = 10.
2. A l'instant pris comme origine, 0 = 0. Étudier l'évolution de O au cours du temps, en boucle
ouverte, lorsqu'on applique, à l'entrée, à l'instant pris comme origine, une tension u constante qui vaut
Mo ~ 12,6 V .
3. Exprimer, en fonction de A , <J>o et r, la fonction de transfert directe Hdip) ■ Quelle est la
fonction de transfert retour Hr(p) ? En déduire les fonctions de transfert, en boucle ouverte et en boucle
fermée.
4. Comparer l'évolution de Û au cours du temps en boucle fermée à son évolution en boucle
ouverte. Commenter l'influence de la boucle.
Moteur
Ampli
i
ll
e i
7T7T
/
^
u
m Hî
Moteur Disque
|
7777
Hr
fi.
Disque moteur
-O
firf
-G-
-{jû
Engrenage
Disque D
llr
7777
Fig. 13.26.
Fig. 13.27.
P13- 8. Asservissement de position d'un moteur à courant stationnaire
Un moteur à courant stationnaire, que l'on utilise dans un asservissement de position, est alimenté
par un courant d'intensité / (Fig. 13.27). Le couple moteur est proportionnel à /, Mm = d>o /. Il existe
en outre deux couples résistants, l'un constant —C, , dû à un réducteur constitué par un engrenage entre
deux disques, l'autre de frottement visqueux —anifl proportionnel à la vitesse angulaire H.
1. Appliquer le théorème du moment cinétique au moteur, en projection sur l'axe de rotation, sachant que le moment d'inertie par rapport à cet axe est Jm .
2. Même question pour le disque D relié au disque moteur par l'engrenage, sachant que le moment d'inertie de ce dernier est J(j, qu'il est soumis à un couple de frottement visqueux —a^
,
proportionnel à sa vitesse angulaire fÉ/, et que l'engrenage transmet, sans perte, la puissance mécanique. Grâce à cet engrenage, les vitesses de rotation du moteur et du disque sont reliées par l'équation
de proportionnalité : fi = /x
avec /r > 1 .
3. Le moteur a une f.c.e.m Em = d>ofi, proportionnelle à la vitesse angulaire, et une résistance
électrique Rtn . Exprimer Mm en fonction de fi et de la tension u appliquée à ses bornes.
4. Établir F équation différentielle à laquelle satisfait fi. En déduire la fonction de transfert H{j?)
entre m et fi . Calculer /7(0) et r , sachant que Oq = 0,5 N • m ■ A-1 , Jm = 1CP4 kg • m2, /x = 10 ,
Jd = 2x \ O-3 kg ■ m2 , am = 5x10-3 N ■ m • s , aj = 10-3 N ■ m ■ s et, Rm = 25 fi .
457
Rétroaction. Application aux asservissements
P13- 9. Influence de la rétroaction dans un montage à transistor en émetteur commun Cwëb)
Le circuit de la figure 13.28a représente un montage en émetteur commun dans lequel le transistor
utilisé présente une résistance de base
, une tension de seuil de In jonction base-émetteur Ube et un
facteur d'amplification en courant (3 . Les paramètres stationnaires sont supposés égaux aux paramètres
dynamiques. Les capacités choisies sont telles que les condensateurs sont équivalents à des coupecircuits en régime stationnaire et à des courts-circuits aux fréquences utilisées. La f.e.m de l'alimentation
stationnaire est E.
1. Déterminer le facteur d'amplification en tension, d'une part en régime stationnaire, d'autre part
pour les petits signaux. Quelles sont les impédances d'entrée et de sortie, Ze et Zs. Application numérique pour E = 10 V, (3 = 250, et en outre ;
Rc = 3,3 kO
Ri = 95 kfl
R2 = 6,5kn
= 1 kfi
E/ = 2,2kn
Ube = 0; 6 V
2. Sachant que (3 varie fortement d'un transistor à l'autre, au sein d'une même série, et que rh
dépend du courant de la base, quels sont les inconvénients d'un tel montage ?
3. On cherche à améliorer le montage en introduisant une résistance de rétroaction rh = 800 Q,
comme sur la figure 13.28b. Établir les nouvelles caractéristiques du montage et commenter l'effet de la
rétroaction.
Rc
\
Ri
Rc
Ri
Fig. 13.28.
P13- 10. Rétroaction idéale sur une chaîne directe imparfaite
-web
Sur la figure 13.29a, la source de courant, commandée par l'intensité i\ , n'est pas idéale, car
l'impédance d'entrée Re n'est pas nulle. A l'aide d'une source de courant idéale, commandée par une
intensité is, on réalise une rétroaction.
1. En l'absence de rétroaction, déterminer la fonction de transfert en courant H = i jie, ainsi que
l'impédance d'entrée Ze du montage.
2. En présence de rétroaction, calculer le nouveau facteur d'amplification en courant du système
complet, ainsi que son impédance d'entrée. Comparer le résultat à celui obtenu dans la question précédente, pour Hd = 1000,
= 0,1 et /C = 1 kQ.
3. Mêmes questions avec la source de courant commandée par la tension u\ et la rétroaction réalisée avec une source de tension commandée par le courant C (Fig. 13.29b), la fonction de transfert
étant alors définie par H = is/ue . Comparer la dimension physique de cette dernière à celle de la fonction de transfert introduite à la première question. Pour l'application numérique, on prendra les mêmes
valeurs que précédemment, les unités physiques étant évidemment différentes.
458
13. Rétroaction. Application aux asservissements
4. Étudier l'influence de la dispersion sur la chaîne directe lorsque Hj est connu à 10% près, puis
sur la chaîne de rétroaction sachant que
est détenuiné à 0,1 % près.
j*
h1
4h
©'
R.
o
1
R.
R<i i 1
^i
U\
©
Rr
Rr
(Dt«-/S
Hrh
a)
b)
FlG. 13.29.
P13- 11. Filtre passe-bande à capacités commutées
Le schéma synoptique de la figure 13.30 représente un filtre à capacités commutées. On donne
pour la fonction de transfert du préamplificateur Hp = 200, pour la fonction de transfert de la chaîne
retour Hr = 2, pour le facteur d'amplification de l'intégrateur a = 0,4 et pour la constante de temps
T = 1 JJLS .
H,,
JCOT
Ue
U.
7777
7777
1
j(OT
â
7777
U2
7777
FTG. 13.30.
1. Montrer que la fonction de transfert H{j(ô) = u jue se met sous la forme :
H {](*>) =
1 + j [ùjt - a/(wr)] /Hr
Déterminer l'expression de Au en fonction des paramètres du filtre.
2. Étudier le module et l'argument de H{joj) lorsque ru —> 0 et w —> oo . En déduire la nature du
filtre.
3. Pour quelle valeur com de co, \H(jo))\ est-il maximal ? Préciser la valeur maximale du module
et la fréquence
correspondante.
4. Dans ce filtre, les intégrateurs sont à capacités commutées, à la fréquence fa , la capacité utilisée
dans la rétroaction négative est cent fois supérieure à la capacité commutée sur l'entrée inverseuse de
PAO. Montrer que la fréquence centrale du filtre est accordable par fa et a . Déterminer la valeur de la
fréquence de commutation qui permet d'avoir une fréquence centrale du filtre égale à 100 kHz .
14
Oscillateurs électriques
Les oscillateurs électriques sont des systèmes capables de produire des signaux temporels alternativement croissants et décroissants, souvent périodiques. Leur rôle est essentiel car, d'une part, ils
interviennent dans la production, le transport et la détection de l'information, et d'autre part, ils sont largement utilisés pour mesurer des durées et réaliser des compteurs ; aussi, les retrouve-t-on en modulation et démodulation (cf. chapitre 16), ainsi qu'en électronique numérique (cf. chapitre 18).
I, _ DIFFERENTS TYPES D'OSCILLATEURS
1.1. — Oscillateurs et oscillations
a) Différentes familles d'oscillateurs
Un oscillateur est un système dont l'évolution présente des variations alternativement croissantes
et décroissantes de l'une de ses grandeurs caractéristiques. En électronique, les grandeurs concernées
sont des courants ou des tensions.
Un oscillateur s'amortit lorsque, en moyenne, la puissance dissipée est supérieure à la puissance
des sources électriques (cf. chapitre 12). C'est le cas, par exemple, d'un circuit oscillant passif en régime
libre (cf. chapitre 3). Trois méthodes permettent d'entretenir les oscillations d'un circuit oscillant passif.
i) On met le circuit en relation avec une source d'énergie externe alternative, par exemple une
tension sinusoïdale. On réalise ainsi un oscillateur forcé entretenu dont la fréquence des oscillations est
celle de la source (cf. chapitre 3).
ii) On fait varier périodiquement un paramètre caractéristique du circuit. On réalise alors un oscillateur paramétrique (cf. Mécanique).
iii) On insère dans dans le circuit un dipôle actif, lequel est relié à une source auxiliaire d'énergie
stationnaire ; l'oscillateur est dit auto-entretenu. On distingue dans cette catégorie les oscillateurs quasi
sinusoïdaux et les oscillateurs de relaxation (cf. chapitre 12).
Dans chacun de ces cas, en régime établi, l'énergie dissipée est précisément compensée par l'énergie apportée par les sources. Sur la figure 14.1 on a classé ces différents oscillateurs.
Dans ce chapitre, nous étudierons principalement les oscillateurs auto-entretenus qui sont les plus
courants car les plus utilisés.
460
14. Oscillateurs électriques
Oscillateurs
entretenus
amortis
forcés
paramétriques
autoentretenus
quasi sinusoïdaux
de relaxation
Fig. 14.1.
b) Caractéristiques des oscillations électriques
Les oscillations électriques produites par un oscillateur se caractérisent par :
i) leur fréquence /o ,
ii) leur fonne ou contenu harmonique,
iii) leur amplitude ou, pour les signaux non symétriques, leurs valeurs de crête,
iv) leur stabilité en fréquence ou en amplitude.
Selon les besoins, on peut être conduit à rechercher une fréquence très stable, à contrôler ou moduler l'amplitude ou la fréquence des oscillations, à produire des signaux de forme spécifique, par exemple
sinusoïdale ou carrée.
1.2, — Classement des oscillations
Il est possible de classer les oscillations en différentes catégories, selon leur forme.
a) Oscillations sinusoïdales ou harmoniques
Un signal sinusoïdal ou harmonique s{t), produit par un oscillateur harmonique, a pour expression :
s{t) = sm COS{>of + (p)
(«o étant la pulsation, /o = 1 /7o =
la fréquence et (p la phase à l'origine des temps.
Sur la figure 14.2, on a représenté l'évolution temporelle d'un oscillateur harmonique, ainsi que
son spectre de Fourier î(/"), qui ne comporte qu'une seule composante de fréquence /o et donc deux
pics à / — /o et / = —fo (cf. annexe 2).
sit)
m
l//o
/o
-/o
a)
FIG. 14.2.
b)
/
Oscillateurs électriques
461
On sait que Toscillateur harmonique satisfait à l'équation différentielle suivante (cf. chapitre 4) :
2
d2^
1
9
^
1
+ -o)\s2 = Cte
s
2 + WÔ = 0 OU
df
que l'on obtient en intégrant la première équation après l'avoir multipliée par .v.
On réalise approximativement un oscillateur harmonique électrique à l'aide d'un circuit rLC série,
dans lequel r est la résistance inévitable des fils du bobinage (Fig. 14.3a). L'intensité du courant dans
un tel circuit série satisfait à l'équation différentielle suivante que l'on obtient aisément en appliquant la
loi des mailles :
d*
q
àq
L— + n + — = 0 avec i = —
dt
C
dt
puisque q est la charge de l'armature du condensateur vers laquelle est orienté le courant. En dérivant
cette équation par rapport au temps et en simplifiant, on obtient l'équation canonique caractéristique :
d2i
d?
1 di
. + ûri / — 0
Te dt
avec
1
— = ->0
Te
L
et
wq =
1/2
1
\ LC
La durée de relaxation en énergie re étant positive, en régime pseudo-périodique, l'intensité oscille
avec la pseudo-pulsation o)a :
1/2
s{t) = 5W exp (—^ J cos(coat + (j)s)
\ reJ
avec
coa = o)Q(\ \
)
\
4O)-0T-J
et s'amortit inévitablement selon un terme exponentiel de la forme exp[—r/(2re)] (cf. chapitres 3 et
4). Le spectre de Fourier d'un tel signal amorti exponentiellement est centré autour de la fréquence /o
(Fig. 14.3b), avec une répartition spectrale qui a une forme dite lorentzienne (cf. chapitre 15)
«o
Sl
c:
fo
f
a)
Fig. 14.3.
L'introduction d'un composant actif dans le circuit est donc nécessaire pour limiter les pertes énergétiques. Cependant, il est impossible de compenser exactement la dissipation d'énergie, ne serait-ce
qu'en raison de la dérive temporelle des valeurs des composants du circuit. En cas de compensation
par défaut, les oscillations s'amortissent exponentiellement ; avec une compensation par excès, elles
croissent exponentiellement, ce qui a pour effet de rendre le système non linéaire.
En résumé, un oscillateur harmonique est impossible à réaliser, en raison des effets dissipatifs
des éléments résistifs qui accompagnent nécessairement les bobines, les condensateurs et les fils de
connexion (cf. chapitre 4).
462
14. Oscillateurs électriques
b) Oscillations quasi sinusoïdales
Les signaux quasi sinusoïdaux sont des signaux dont la forme est très proche de celle d'une sinusoïde. Le spectre de Fourier correspondant comporte des harmoniques de faible amplitude ; le taux de
distorsion harmonique est donc faible.
Reprenons l'exemple de l'oscillateur à résistance négative à amplificateur opérationnel (Fig. 12.26)
déjà étudié (cf. chapitre 12). Le système produit des signaux quasi sinusoïdaux dont l'évolution et le
contenu harmonique sont donnés respectivement sur la figure 14.4. L'harmonique de rang 3 est faible
mais pas nul.
m
h
3/o
b)
a)
FIG. 14.4.
c) Oscillations de relaxation
Les oscillations de relaxation sont des signaux qui peuvent prendre deux valeurs au cours du temps,
l'une haute, l'autre, basse. La durée de chacun de ces deux niveaux est très supérieure à celle nécessaire
à la transition entre ces niveaux, ce qui engendre des signaux à fort taux de distorsion harmonique,
puisque plus proches de la forme rectangulaire que de la forme sinusoïdale.
Dans l'exemple de l'oscillateur de relaxation (Fig. 12.29) déjà analysé (cf. chapitre 12), le système
produit des signaux carrés dont l'évolution et le contenu harmonique sont représentés sur la figure 14.5 ;
ces signaux sont riches en harmoniques.
us(t)
Z(f)
/o
a)
3/o
5fo
7/o
/
b)
FIG. 14.5.
d) Autres types d'oscillations
Il existe des signaux qui n'entrent pas dans les deux catégories précédentes, par exemple les signaux
apériodiques produits par un oscillateur présentant du chaos.
Oscillateurs électriques
463
L'oscillateur chaotique de Chua (Fig. 12.33) déjà étudié (cf. chapitre 12) est un système d'ordre 3.
Sur la figure 14.6, on peut suivre l'évolution d'une tension du circuit au cours du temps et constater que
le spectre de Fourier est continu.
b)
a)
FIG. 14,6.
1.3. — Classement des oscillateurs
On classe habituellement les oscillateurs selon la forme des oscillations qu'ils produisent, d'où
l'existence de deux catégories d'oscillateurs, les oscillateurs quasi sinusoïdaux et les oscillateurs de
relaxation (cf. chapitre 12).
Cette classification est néanmoins réductrice car, comme l'a montré van der Pol, un même système peut adopter soit un comportement quasi sinusoïdal soit un comportement de relaxation, selon le
domaine de valeurs de ses composants.
II. _ OSCILLATEURS QUASI SINUSOÏDAUX
Deux méthodes permettent d'obtenir des oscillations quasi sinusoïdales : la première consiste à
associer en boucle un amplificateur et un circuit sélectif, dans la seconde on insère dans un circuit
résonnant un dipôle dont la caractéristique présente une portion à résistance négative .
II. 1. — Oscillateur bouclé
L'association d'un amplificateur et d'un filtre forme un système bouclé d'entrée nulle, qui peut
être représenté, en régime linéaire et harmonique, par une chaîne directe et par une chaîne retour
(cf. chapitre 13).
Fig. 14.7.
Remarque : Les rôles des chaînes retour et directe peuvent être permutés. Cependant, dans l'analyse
générale des oscillateurs considérés comme des systèmes bouclés, on a l'habitude d'associer la chaîne directe à l'amplificateur.
464
14. Oscillateurs électriques
Comme exemple d'oscillateur bouclé, étudions l'oscillateur à pont de Wien, représenté sur la figure 14.8, dans lequel on reconnaît un AO , monté en amplificateur non inverseur (cf. chapitre 8), et un
filtre de Wien (cf. chapitre 6). La chaîne directe de fonction de transfert
est constituée par un amplificateur inverseur à AO, la chaîne de retour est un filtre de Wien.
+
C
R
M]
7777
Pont de Wien
n
<?3
R
Ri
«3
C 7777
«2
Ri
b-1 Chaîne directe
-A
7777
7777
Chaîne retour
777
FIG. 14.8.
Recherchons l'équation différentielle à laquelle satisfont les tensions représentées sur le circuit.
L'intensité h du courant qui charge le premier condensateur dans le pont est reliée aux tensions d'entrée
«2 et de sortie «3 du pont par l'équation :
C
J~t(Ll2 - "3 - ^2)
h =
puisque «2 — ^3 — Rii est la tension à ses bornes. En outre, les tensions u\ et «2 » respectivement à
l'entrée et à la sortie de l'amplificateur, sont reliées par l'équation d'un pont diviseur :
Uo
]
+1)
Comme PAO, qui fonctionne en régime linéaire, est idéal, son impédance d'entrée est infinie ; il en
résulte que A est la somme de deux contributions :
U3 , dqs
i2
+
-«
113
du3
+c
^7^«
^7
Il vient, en éliminant ij , puisque u\ = 113 :
21 + ^ = ^
R
dt
dt
âui
j>r —-—
1 4- —-- I U\ — U\ — U\ — /vC
R2 j
d/
ce qui donne en effectuant et en ordonnant les différents termes :
d mi
2
dt
1 du\
t d/
(WqMi = 0
avec
r = RC
Ri
IRj - Ri
et
coq
RC
Notons que les trois tensions u\ , 112 et 113 vsatisfont à cette même équation différentielle, caractéristique
d'un oscillateur.
Le circuit est le siège d'oscillations spontanées si r < 0, c'est-à-dire s\ R\ > IR2 . Pour r infini,
on obtient la période propre de l'oscillateur harmonique correspondant :
277
7b = — = ITTRC
ù)o
Pour réaliser un tel oscillateur, on adopte les valeurs suivantes : R = Ri = 10 kll et C = 20 nF .
465
Oscillateurs électriques
i) Pour /?i < 20 kO, on n'observe pas d'oscillation dans le circuit.
ii) Pour R\ = 20,2 kli, les oscillations sont quasi sinusoïdales (Fig. 14.9 a). La période mesurée
est en excellent accord avec la valeur calculée :
Fq = IttRC = 2tt x 104 x 20 x lO-9 « 1,25 ms
soit
/0 = — « 796 Hz
Tq
L'amplitude de la tension iij est voisine de la tension de saturation haute de PAO, environ 14.7 V.
Celle de la tension u\ est dans le rapport du facteur d'amplification :
Ml =
1
1
l+/?i//?2
"2
1+2,02
14,7 «4,9 V
Pour de plus fortes valeurs de l'amplification, obtenues par exemple avec R\ = 50 kfl, PAO sature en
sortie. Les signaux se déforment, s'enrichissent en hanuoniques, et deviennent des oscillations de relaxation (Fig. 14.9 b). La nouvelle période, dans ce mode où les effets non linéaires dominent, est plus
élevée ; on trouve une valeur voisine de 1,7 ms. La tension efficace en sortie de PAO étant plus importante du fait de la forme rectangulaire des signaux et donc de l'enrichissement harmonique, l'amplitude
de M] à la sortie du filtre de Wien linéaire a, elle aussi, augmenté.
M(V)
"(V)
U2
10
U\
r (ms)
(ms)
-10
-10
a)
b)
FIG. 14.9.
Remarque : La fonction de transfert d'un pont de Wien a déjà été établie (cf. chapitre 6) :
1
Hijo)) =
3+
1
- Û>o/U>)
aVeC
0)0
RC
II. 2, — Oscillateur à résistance négative
a) Résistance négative avec AO dans un circuit série
Nous avons déjà étudié l'influence des non-linéarités sur un oscillateur présentant une résistance
négative avec AO (cf. chapitre 12). Rappelons les principaux résultats.
En régime linéaire, l'intensité du courant dans le montage série (Fig. 14.10a) obéit à l'équation
différentielle du second ordre :
466
14. Oscillateurs électriques
en désignant par r la résistance de la bobine et par R,, la résistance négative :
=
Ki
<0
Le circuit présente des oscillations non amorties si |/y > r.
R\
oo
Rn
Sr = î *
Ri
Hd
r
Sel — U
Hr
7777
7777
7777
b)
a)
FlO. 14.10.
Ce système se ramène à un oscillateur bouclé (cf. chapitre 13) ; pour s'en rendre compte, il suffit de
délimiter le dipôle V à résistance négative et de disposer le système comme le montre la figure 14.10b.
Déterminons, en régime sinusoïdal, les fonctions de transfert des chaînes directe et retour :
= — = -Rn
et
HrjS(Jù)) = —
^
1
\/R
R + jLù) + 1 /(JC(o)
1 + jQx(o)/ojo - coo/co)
avec :
wo =
1
(Lcyr-
et
a=
( l ^1/2
b) Résistance négative avec AO dans un circuit parallèle
De même, la tension aux bornes du montage parallèle (Fig. 14.1 la) obéit à l'équation ;
d2 u
\ àu
+
+
7
^
v
0oU
0
ou
/ 1 \
1/2
Te = C
0)0
rR,
'âfi
VeTt ' ~ (Zc )
Rr.
Ce circuit présente aussi des oscillations non amorties pourvu que \Rn\ < r.
et
R
Rn = —R — < 0
^2
Ici aussi, le système se ramène à un oscillateur bouclé. On s'en rend compte en délimitant le dipôle
T> à résistance négative et en disposant le système comme indiqué sur la figure 14.11b. On a alors :
1
Hd^ijo)) =
K,,
et
Hr<s{jùj) =
R
1/i? + 1/(JLù)) -\-jCù)
1 A jQp(o)(tuo
—
vjq!co)
avec :
0)Q —
/CR2\
(LC)1/2
et
Qp =
1/2
L
Remarques : 1) Même si ces deux types d'oscillateurs quasi sinusoïdaux, série et parallèle, se distinguent dans la réalisation expérimentale, il n'y a aucune différence fondamentale entre
oscillateurs bouclés et oscillateurs à résistance négative.
2) On notera l'inversion des entrées + et — de F AO dans les oscillateurs série et parallèle
(Fig. 14,10a et Fig. 14.1 la), cela pour éviter la saturation de FAO dans le dernier montage.
467
Oscillateurs électriques
Hd
Rn
,x
fSd - l
X
:c
-o
«o
<3
T
L
Ri
7777
7777
c
L
Sr = U
7777 7777
a)
b)
FIG. 14.11.
c) Résistance dynamique négative d'un dipôle
On peut aussi réaliser un oscillateur à résistance négative en utilisant un dipôle dont la caractéristique présente une région à résistance dynamique négative, par exemple une diode à effet tunnel ou un
tube à décharge (cf. chapitre 12).
Sur la figure 14.12a, on a représenté la caractéristique d'une diode tunnel. En ajustant convenablement les valeurs de la résistance r et de la f.e.m stationnaire E du dipôle AB (Fig. 14.12b), on fixe
le point de fonctionnement de la diode au point d'inflexion de sa caractéristique (Fig. 14.12a). Désignons par Ra sa résistance dynamique, qui est négative en ce point. Le condensateur de découplage,
de forte capacité Q, supprime la tension stationnaire E aux bornes de la diode, pour le reste du circuit, alors que la bobine, de forte inductance Ld , rend négligeable le courant variable dans le générateur.
B
j^®5fflS5Y
VRd
Cd
V
C
A uci
E
L
C
Rd
R
L <3
<3
<3
'd
Eo E
a)
R
A
b)
c)
FIG. 14.12.
Le dipôle AB se comportant comme un dipôle à résistance négative, on l'associe à un circuit RLC
parallèle. Le circuit équivalent de l'ensemble est représenté sur la figure 14.12c. L'intensité dans le
circuit oscille si \Rd\ <R (cf. Exercices).
II. 3. — Analyse des oscillateurs bouclés
a) Schéma synoptique
Sur la figure 14.7 on a rappelé le schéma synoptique d'un système bouclé, avec ses fonctions de
transfert direct et retour, respectivement Hdijo)) et Hr(Joj) . En boucle fermée, comme la rétroaction
14. Oscillateurs électriques
468
est positive, la fonction de transfert globale du système a pour expression (cf. chapitre 13) :
Hn =
1 - HdHr
De façon explicite, en régime sinusoïdal, on a :
14 = Hd{j(o)sr
et
sr =
ce qui donne (cf. chapitre 13) :
^ = Hd{jù))Hr(jLo)s4
soit
I1 - Hc,{Jù))Hr{j(i))\ ^ = 0
b) Critère de Barkhausen
Pour qu'un signal puisse exister dans le circuit, en l'absence de signal d'entrée, il est nécessaire de
réaliser la condition suivante, connue sous le nom de condition ou critère de Barkhausen, du nom de
l'ingénieur allemand H. Barkhausen :
Hd{jo))Hr{j(o) = 1
soit
\Hd{joj)Hrijo))\ = 1
et
arg [Hd{jù))Hr{jco)\ = 0
Notons qu'une telle condition correspond à une valeur infinie de la fonction de transfert H0 du système
en boucle fermé : un signal d'entrée infinitésimal est capable de fournir en sortie un signal fini. Montrons
sur un exemple que la première impose une contrainte sur le gain de l'amplificateur, et que la seconde
détermine la fréquence des oscillations du circuit.
Exemple : pour l'oscillateur à pont de Wien étudié précédemment, la condition d'oscillation de
Barkhausen s'exprime selon :
/
\
/?]\
1
fy —
RiJ 3 +y( /
^
^o/
ce qui donne respectivement, en séparant les parties réelle et imaginaire :
R]
1 + — =3
i?2
et
co
coq
^0
'V
=0
On retrouve le résultat déjà établi :
— 2R2
et
co — coq — ——
KC
Notons que le critère de Barkhausen traduit la condition pour qu'un signal sinusoïdal puisse exister au
sein du système.
La réalisation expérimentale précise de ce critère est en réalité impossible. Deux cas se présentent
alors.
i) Si la condition est réalisée par défaut, c'est-à-dire si \Hd(jco)Hr(ja>)\ < 1 , les oscillations éventuelles s'amortissent exponentielleraent ; on finit par ne plus observer que des oscillations aléatoires de
faible amplitude, appelées bruit. L'énergie apportée par l'amplificateur est insuffisante pour compenser les pertes dissipatives.
ii) Si, en revanche, la condition est réalisée par excès, c'est-à-dire si \Hd{jco)Hr(j(o)\ > 1, les
oscillations s'amplifient exponentiellement au cours du temps ; on finit alors par sortir du domaine de
fonctionnement linéaire du circuit, ce qui a pour effet de limiter l'amplitude des oscillations. Aussi,
pour obtenir des oscillations quasi sinusoïdales, faut-il se placer dans le voisinage supérieur du critère
de Barkhausen :
\Hd(joj)Hr(jco)\ & 1 et \Hd(jco)Hr(jco)\ > 1
On comprend dès lors que le critère de Barkhausen soit parfois appelée condition d'accrochage du
système.
Oscillateurs électriques
469
c) Équation différentielle du système
On peut établir l'équation différentielle à laquelle satisfont les signaux direct et retour, respectivement sd et s,■, à partir des fonctions de transfert Hd{j(o) et Hr{jto), en développant le numérateur de
1 — Hci{jù))Hr(j(o) dans l'expression du critère de Barkhausen.
Montrons-le sur l'exemple d'un circuit RLC parallèle à résistance négative (Fig. 14.11b). On a :
Hd{j(o) =
~
et
Hr(jù)) =
1 +jQp(à>/— ^o/
l'égalité 1 — Hd(jù))Hr(jû)) = 0 devient :
I ù)
i+M-
(On \
R
+ir=o
Ù) )
R
(Oo
En multipliant par j(o(o^jQp , on trouve :
a\ 1/2
O)2 + (/w)^
avec
+ rao - 0
Qp =
et
wq =
(LC)'/2
On en déduit finalement l'équation différentielle à laquelle satisfait sj , ou sr, que l'on désigne indifféremment par s en identifiant les produits jco à des opérations de dérivation :
d2-v ,
d^
+
1 /I
,
cU
+
1 \ d^ ,
/d d7
2
+ û
^-0
d) Naissance et entretien des oscillations
Au repos, l'oscillateur ne présente que du bruit (signaux aléatoires, de faible amplitude), dont
l'origine est multiple (cf. chapitre 17). Si le critère de Barkhausen est expérimentalement satisfait, l'état
de repos est instable : les oscillations naissent et se développent jusqu'à atteindre la limite du domaine
linéaire, c'est-à-dire le domaine non linéaire. Notons que ce dernier doit, lui aussi, être instable pour
permettre les oscillations. Si ce n'est pas le cas, on observe une saturation et des signaux stationnaires,
comme à la sortie d'un AO en saturation. L'amplitude des oscillations est ainsi déterminée par la nonlinéarité du système.
CM
o.
3
Analysons l'exemple de l'oscillateur à pont de Wien, en considérant les valeurs maximales sj^,, et
srjn des signaux quasi sinusoïdaux sd[t) et ^r(0 ■
'
La chaîne directe, de facteur d'amplification linéaire légèrement supérieur à 3 , impose la relation
de transfert
= T{srpil). Quant à la chaîne retour, elle impose, à la fréquence des oscillations, la
relation linéaire :
S(l
Sr n
'' ~
pour satisfaire expérimentalement la condition de Barkhausen.
La résolution graphique de ce système à deux équations permet d'obtenir les tensions efficaces
des signaux et donc l'amplitude des oscillations du système (Fig. 14.13a). On voit que le point de
fonctionnement F détermine l'amplitude des signaux. Sur la figure 14.13b, F est situé avant le coude
et non après.
470
14. Oscillateurs électriques
A Sd m
Sd.m
Chaîne retour
m.
i F Chaîne directe
r^m
b)
a)
FIG. 14.13.
II. 4. — Instabilité angulaire
La chaîne retour d'un oscillateur bouclé définit la fréquence des oscillations, en sélectionnant une
fréquence avec d'autant plus d'efficacité qu'elle est sélective.
Sur les figures 14.14a et 14.14b, on a représenté les diagrammes de Bode du pont de Wien : le
comportement est celui d'un filtre passe-bande peu sélectif. En effet, la fonction de transfert s'écrit :
= , , .^/
TTT
1
- 1A)
ou
x= —
û>0
= 7
/o
et
2=4
3
sont respectivement la fréquence réduite et le facteur de qualité.
*é
G„ dB)
-2
Ig*
2
20
x
-40
b)
a)
FIG. 14.14.
Examinons l'influence d'une petite variation de la fréquence d'accrochage du circuit sur le déphasage en sortie du pont de Wien. Pour cela, développons la phase 0 = arg)#, ] au voisinage de x = 1 :
(£(x) « <j){\) + (x- 1)
\éxJx=\
avec :
^^-arctangM
avec
^ = g (^ - B)
et
^
On obtient :
ô(j) = (f){x) — <£(1) ~ —2Q{x — 1)
d'où
|x — 11
M
2Q
471
Oscillateurs électriques
Ainsi, un écart angulaire
toléré par le système engendre une variation relative de la fréquence des
oscillations, d'autant plus faible que le facteur de qualité de la chaîne retour est grand :
f-fo
fo
2Q
On voit qu'en raison de la faiblesse de Q et donc de la mauvaise sélectivité du pont, la stabilité en
fréquence de l'oscillateur à pont de Wien peut s'avérer insuffisante dans certaines applications.
Exemple : dans un oscillateur à pont de Wien, une variation de phase de 3° , soit environ 0,8% du
cercle trigonométrique, provoque une variation relative de la fréquence de 3(7r/180) x 3/2
0,078
soit environ 8% !
II. 5. — Stabilisation d'amplitude
La stabilisation d'amplitude a pour but d'améliorer la forme des signaux et par conséquent le taux
de distorsion harmonique.
L'analyse spectrale de la tension de sortie 112 de l'AO dans l'oscillateur à pont de Wien (Fig. 14.8)
révèle la présence de nombreux harmoniques impairs, mais aussi pairs du fait de l'absence de symétrie
des tensions d'alimentation de l'AO (Fig. 14.15a).
'I«2(/)|
I«2(/)|
1
v _/
1\
0
0,8
\
J1 \
ft
V
1,6
2,4
h
—
3,2 /(kHz)
0
a)
0,8
1,6
2,4
3,2/(kHz)
b)
FIG. 14.15.
Pour améliorer le taux de distorsion du signal, il faut éviter le coude de saturation en sortie de
l'amplificateur, lequel provoque une augmentation de l'amplitude des harmoniques. Pour cela, il est
nécessaire de faire varier le facteur d'amplification, de telle sorte qu'il diminue avec l'amplitude des
oscillations et que le point de fonctionnement F se situe avant le coude C (Fig. 14.13b).
a) Utilisation d'une varistance
Rappelons qu'une varistance est un résister dont la valeur dépend de la tension appliquée à ses
bornes, et qu'il en existe deux types (cf. chapitre 7) : celles à coefficient de température positif (CTP)
dont la résistance croît avec la tension, et celles à coefficient de température négatif (CTN) dont la
résistance décroît avec la tension.
Dans le cas de l'oscillateur à pont de Wien, le facteur d'amplification de la chaîne directe est :
HtI= 1
R.
R2
En remplaçant la résistance R\ par une varistance CTN, ou la résistance R2 par une varistance CTP, on
obtient l'effet voulu. Il convient ensuite de calculer convenablement la valeur de la résistance restante et
de s'assurer que l'amplitude Sd,m ^ inférieure à la tension de saturation de l'amplificateur.
472
14. Oscillateurs électriques
Exemple : dans l'oscillateur à pont de Wien (Fig. 14.8), on utilise une varistance CTP dont la
résistance vaut Rp = R2 = 350 O , sous une tension d'amplitude um = 1 V .
Au point de fonctionnement F , le facteur d'amplification valant 1/3 , l'amplitude de la tension de
sortie vaut : U2iin = 3um = 3 V Quant à la valeur de la résistance R\ , elle est telle que :
1 H
=3
r
et donc
p
R] = 2RP = 700 fi
Comme on peut le constater sur la figure 14.15b, l'amélioration de la qualité harmonique du signal est
significative.
b) Commande automatique de gain
Une autre technique de stabilisation d'amplitude consiste à prélever une partie du signal oscillant
dans le circuit et à l'utiliser pour commander le facteur d'amplification. Cette méthode, appelée commande automatique de gain, peut être réalisée avec un transistor à effet de champ (cf. chapitre 7) utilisé
dans sa zone ohmique (Fig. 14.16).
////
////
////
Ui
Detecteur d'enveloppe
S,
-W
Cd
Rd
7777
Uds
U.,y< 0
FIG. 14.16.
Sur cette figure, le signal «2 prélevé est traité dans le système détecteur d'enveloppe (cf. chapitres 4
et 9). La chaîne directe est constituée par l'amplificateur non inverseur à AO, la chaîne de retour est un
pont de Wien. En sortie, la tension négative ugs, proportionnelle à la tension de crête des oscillations
«2(0 , est utilisée pour polariser la grille du transistor à effet de champ (TEC) dans sa zone ohmique
( < IV). Rappelons que, dans ce mode de fonctionnement, la caractéristique
est proche d'une
droite dont la résistance Rjs augmente au fur et à mesure que uss diminue (cf. chapitre 7). Le facteur
d'amplification de la chaîne directe devient :
Hd= 1
Rl + Rds
Lorsque l'amplitude des oscillations U2{t) augmente, ugs diminue, Rds augmente et le facteur d'amplification diminue, ce qui permet de stabiliser l'amplitude des oscillations du circuit.
Exemple : l'oscillateur peut être réalisé avec un TEC à canal n BF245C et les valeurs suivantes
des composants :
C = 10 nF
/?=10kfl
Q=1|jlF
Quant à Rd , on l'obtient avec un potentiomètre de 100 kfi
i?i=4,7kn
R2 = 330fl
Oscillateurs électriques
473
c) Avantages et inconvénients de Voscillateur à pont de Wien
L'oscillateur à pont de Wien présente l'avantage d'être peu coûteux et peu encombrant parce qu'il
ne comporte pas de bobine. En revanche, sa stabilité en fréquence est médiocre et la commande en
tension de la fréquence peu aisée, puisqu'il est nécessaire de faire varier simultanément les valeurs des
composants du circuit (résistors ou condensateurs).
D'autres limitations existent : une due à l'AO, à sa bande passante, mais aussi à sa vitesse
maximale de balayage, une autre provoquée par les capacités parasites du circuit. En pratique, la
fréquence maximale que l'on peut atteindre avec un oscillateur à pont de Wien est de l'ordre de
500 kHz.
II. 6. — Oscillateurs à haute fréquence
a) Oscillateur Colpitts
L'oscillateur Colpitts, du nom de l'ingénieur américain E. Colpitts, permet de réaliser des oscillations quasi sinusoïdales, de fréquence élevée. La figure 14.17a en montre une réalisation avec un amplificateur TEC, monté en source commune (cf. chapitre 7). Les condensateurs, de capacités Çv et Ci, se
comportent comme des courts-circuits en régime variable ; sur la figure 14.17b on a dessiné le schéma
équivalent du montage.
(
Fie. 14.17.
La fonction de transfert de la chaîne directe se réduit au facteur d'amplification H a — Am du TEC.
Quant à la fonction de transfert de la chaîne retour, on la trouve en transformant le générateur de Norton
en générateur de Thévenin et en reconnaissant un pont diviseur de tension (cf. chapitre 5) :
(l/^+^J-Hl/^+yC^)-1
{l/Rg +jC20))
1
+jLoj + {l/Rd +jC\û})
1
ce qui s'écrit :
Hr
RdRg
Rd -\- Rg — Lm~[C[Rd + C2Rg) + jto\L + (Ci -F C2)RdRg ~ 7.Ci C?/QRoco2j
Le critère de Barkhausen, HdH, = 1 , donne le facteur d'amplification et pulsation coq des oscillations,
474
14. Oscillateurs électriques
en exploitant les parties réelle et imaginaire. On obtient ;
Rd + Ro
=
L
,
{
RdRs
RdRg
2g)
' "
m
~ RsC2
1
C2
+
RjCt
,
C|
c
UA iC2
soit ;
C,
1
+r R \ (
+
(
1
1
RjR, {RsC2
+
+
C2
^
LCiC.)
\
RjC, )
et :
1
(
{RjRgC^
«
W0
ci+^v72
LCiC. )
b) Oscillateurs à quartz
Dans un oscillateur à quartz, on utilise un quartz piézoélectrique inséré entre deux électrodes collées sur deux faces opposées du quartz (cf. chapitre 7).
Un oscillateur à quartz est remarquablement stable en fréquence, et permet d'obtenir des oscillations dont la fréquence est comprise entre quelques dizaines de kHz et quelques dizaines de MHz.
En outre, son comportement est indépendant de la température. Sur la figure 14.18, on a représenté le
schéma électrique équivalent d'un quartz piézoélectrique.
Lq
Cq
—t-wm—II—T-
FlO. 14.18.
L'admittance du dipôle équivalent a pour expression :
y
'
ce qui s'écrit aussi :
=
.w
J
qÙ>
1
jLclC0+\l{jCclC0)
=
./(Q +
c
'q)M - jC'qcoLqCqco2
1 — LqCqû)2
■p
o
(M
(5)
Ainsi, le quartz est un élément purement capacitif, sauf dans le domaine de fréquence \fs,fp] où son
comportement est purement inductif.
Il existe plusieurs architectures d'oscillateurs à quartz. On a représenté, sur la figure 14.19, Foscillateur à quartz de Pierce, qui est un montage de Colpitts dans lequel on a remplacé l'inductance L par
un quartz piézoélectrique.
Pour obtenir la fréquence des oscillations du circuit, il suffit de remplacer 1 /{jLto) par Yq , c'està-dire 1/L par:
g(o>)
= -or(Cq + C'q) I _
Le critère de Barkhausen sur la partie imaginaire donne alors :
(Ci+C2)gH-ClC2w2 = 0
RdRg
d'Où
CiC2
g{oj) =
Ù)2 —
" '
C,+C2
RdRg{Cl + C2)
475
Oscillateurs électriques
C/i
Rd
Quartz
D
S
'S
Rc
R<
C2
C
i
7777
G
FlG. 14.19.
ce qui se réduit à, puisque 1 /[Rd^g) est négligeable devant C|C2<a>2 :
( ^
Cita)
M 7
=
C1C2
ta
2
C, +C2
On en déduit, en égalant les deux expressions de g (ta) :
_(r a- rM
1
- (^/^p)2
cc
'
2
Cl + C2
d'où l'on tire la pulsation tao des oscillations :
w
o = (! + T?) ^
avec
C1C2
V=
(Q+QKQ + co
Exemple : avec Ci = C2 = 20 pF, C(/ = 0.02 pF, C'q = 30 pF, L/; = 1 H, on trouve les
fréquences suivantes :
C = 1,1258 MHz
fs = 1,1254 MHz
et
/o = 1,1257 MHz
III. — OSCILLATEURS DE RELAXATION
La commande de la fréquence des oscillateurs quasi sinusoïdaux est délicate, car elle implique
que l'un au moins des composants du circuit varie (cf. Exercices). Aussi leur préfère-t-on souvent les
oscillateurs de relaxation qui sont plus faciles à commander ; c'est le cas pour les générateurs basse
fréquence.
III. 1. — Multivibrateur astable
a) Montage
Le multivibrateur astable, appelé ainsi en raison de son instabilité, est un oscillateur de relaxation
(cf. chapitre 12), c'est-à-dire un système à deux étals, qui est constitué par l'association d'un filtre
passif passe-bas du premier ordre (cf. chapitre 6) et d'un comparateur à hystérésis (cf. chapitre 8). Avec
le montage de la figure 14.20a, dans lequel R = R\ = R2 = 4-.1 kfi et C = 22 nF, on observe
l'oscillation de la tension u\ à la sortie de F AO et celle de 112 à l'entrée non inverseuse (Fig. 14.20b).
Les sources de cet oscillateur de relaxation sont les alimentations de l'AO, le réservoir est le
condensateur, enfin le rôle de détecteur de niveau est tenu par le comparateur à hystérésis.
476
14. Oscillateurs électriques
U\ , «2
R
—r
Filtre
passe-bas
7777"
c
////
r/ J
D>c
+
r
«2
U2
/?2
7777"
400
t (us
ôl
Comparateur
à hystérésis
-î/^-b
H
7777"
a)
b)
Fig. 14.20.
b) Fonctionnement du multivibrateur astable
Étudions le fonctionnement de ce système en régime établi. L* AO étant idéal et donc son impédance
d'entrée infinie, les équations reliant les tensions d'entrée et de sortie du filtre s'écrivent :
u\ — 112 = Ri
et
i=C
dU2
77
d'où la relation différentielle suivante entre U] et «2 :
d«2
U] — RC —-— -\- U2
aî
Supposons qu'à un instant pris comme origine, la tension de sortie u\ du comparateur à hystérésis
bascule de l'état bas à l'état haut; la tension d'entrée du filtre vaut donc mi(0) = Usat, alors qu'en
sortie «2(0) = —AuUsat, puisqu'on avait us = —USat, avec :
=
R\ + i?2
en raison du pont diviseur. Le condensateur se charge tant que u\ = Usat, conformément à l'évolution
de la tension 112 à ses bornes donnée par (cf. chapitre 4) :
«2W = Usat + Cte x exp
= Usa, - (1 +Au)Usatexp (-^;)
en tenant compte de sa valeur initiale.
Le comparateur à hystérésis bascule à nouveau, à l'instant b tel que «2(^1 ) = u+ = AuUsclî,
puisque us = Usat. On a donc :
Usa1 - (1 +AH)Usa[cxp (-^) = AuUS(lt
d'où
t\ = RCAn Q
La tension de sortie du comparateur devient m = — Usal et l'évolution de «2 satisfait alors à l'équation :
d iio
— Usat — RC—
h Ul
at
laquelle s'intègre aisément, comme précédemment, mais en tenant compte de la nouvelle valeur initiale
"2 (h) 1
t-ti
Ulit) = -Usât + Cte X exp (-^) = -Usa, + (Au + 1) exp 1^-
RC
Oscillateurs électriques
477
La première période s'achève alors à l'instant ^ lorsque le comparateur bascule :
«2(^2) = -Al,Usât
soit
t2 = ti+ /?Cln
l +Af(N\
1 - A,
Si les tensions de saturation de l'AO sont symétriques, les signaux obtenus le sont aussi. La période des
oscillations s'en déduit aisément :
T = /?Cln 1 j
+ RC\n
= 2^Cln
soit
T = 2RC\n (l + 2^
en explicitant Au en fonction des résistances. Les amplitudes des tensions u\ [t) et U2{t) ont alors pour
expressions respectives : Usa, et UsatR[l(R\ +/?2)Exemple : avec les valeurs précédentes des composants, on trouve une période proche de celle qui
est mesurée, 7 = 2 x 4,7 x 103 x 22 x 10 -9 x In 3 ~ 0,227 ms.
Remarques: 1) La forme du signal 112 obtenu s'écarte notablement d'une sinusoïde.
2) Le comparateur à hystérésis est un système non linéaire ; aussi, les signaux obtenus
sont-ils à contenu harmonique riche.
3) Un tel oscillateur peut servir à déterminer la capacité inconnue C, d'un condensateur :
on compare les périodes de relaxation 7/ et Tm obtenues avec deux capacités, C, et une
autre connue Cm ; il suffit alors d'utiliser la relation de proportionnalité Ci = Cin{Ti/Tin).
III. 2. — Générateur de signaux
L'oscillateur représenté sur la figure 14.21 est utilisé comme générateur de signaux rectangulaires
et triangulaires. Il est constitué d'un intégrateur et d'un comparateur à hystérésis non inverseur (cf.
chapitre 8), montés en cascade.
Intégrateur inverseur
"c"
Comparateur à
hystérésis non inverseur
Ri
00
7777
7777
7777
Fig. 14.21.
14. Oscillateurs électriques
478
Avantd'analyser le fonctionnement du système, calculons les tensions f//,+ et Uh- qui produisent
respectivement le basculement vers l'état haut et vers l'état bas du comparateur à hystérésis. Pour cela,
appliquons le théorème de Millman à l'entrée non inverseuse du comparateur :
llc
lls
a
0 = — -f^ —
A|
A2
A' ou^
d
iiç — -AA uus
A - —
A
ll
A2
avec
La sortie du comparateur à hystérésis ayant deux valeurs possibles, Usatt+ ou Usa,^ , les tensions de
basculement ont pour expressions respectives :
Up —
AnUsai,-^-
St
Un —
AnUsat,—
Supposons qu'à l'instant pris comme origine, la tension de sortie du comparateur bascule à Usa,i+ .
Le condensateur se charge, à courant constant. L'intégrateur délivre la tension tic suivante :
q
iic — --p,
avec
,
Us = Ri
,
él q
~ —
1
d'où :
dwç _
dr
Lr/
RC sa''+
C
ce qui donne en intégrant :
tlC —
r.y-.Usal"b Cte
aC
SOit
lie —
"b ^c{0)
KL-
en tenant compte de la tension initiale.
Le comparateur change d'état à l'instant î\ , lorsque le seuil de basculement f//,_ est atteint :
Ucih) — Un
soit
—
KL
AuUsat,—
La sortie du comparateur devient alors USUI- < 0. On en déduit la tension uc(t) pour t > t\ :
«c(0 = --^Vsat,- + cte
aC
soit
Uc(t) =
aC
_ + «c('i)
en tenant compte de la valeur de lie à t = t[ .
La période s'achève alors à l'instant t2 , lorsque le comparateur bascule à nouveau parce que la
tension seuil £//,+ est atteinte :
^c(^2) — Up
SOit
"C (t I )
^2 — t ]
n/-' ^sat.— ~
aC
Au Usai,—
En régime établi, la tension en sortie de l'intégrateur retrouve sa valeur de début de cycle, «cfe) ~ uc(0)
Ainsi, la tension aux bornes du condensateur, et donc en sortie de l'intégrateur, est triangulaire.
La période T = t2 et la tension crête à crête ucc = uc{0) — uc{t\) en sortie de l'intégrateur
s'obtiennent à partir des équations :
^c(O)
:
'AuUSar,— — Wc(?i)
Usat,—
et
Uc{t] ) =
AuUsai,+ = ^(7(0)
II vient, en combinant ces équations :
T = AHRc(2~l^±~
L
\
Usât,—
sat,—
U
-'sat,
sat,+ J
et
«cc=A,(CW-C4,,,-)
-j^USat,+
479
Oscillateurs électriques
Pour des tensions de saturation symétriques
réduisent à :
= Usat, les expressions précédentes se
T = AAURC
et
ucc = 2AuUSnt
Exemple : réalisé avec C = l p^F, R = R3 = 2,2 kfl, Rj = 2R\ = 20 kH et, avec des tensions
de saturation symétriques Usât = 15 V , on trouve :
An se 0.5
Tq « 4,4 ms
et
ucc se 7, 5 V
Les tensions us et iic sont respectivement des tensions créneau et triangulaire (Fig. 14.22). La tension triangulaire peut être utilisée en entrée d'un conformateur sinusoïdal, afin de produire une tension
sinusoïdale (cf. chapitre 12).
Us, Uc
Usai> +
I
Us
—AuUSat,—
Ur
0
AtiUsat,+
— Usât,—
Fig. 14.22.
III. 3. — Contrôle de l'amplitude
Pour certaines applications, il est utile de limiter l'amplitude des signaux délivrés en sortie du
comparateur à hystérésis, par exemple pour attaquer un système dont l'entrée est limitée en tension,
comme une carte d'acquisition numérique, ou pour raccourcir le délai de basculement du comparateur
aux fréquences élevées.
On utilise alors deux diodes Zener identiques tête-bêche dont les caractéristiques sont représentées
sur la figure 14.23a ; le montage étudié est celui du multivibrateur astable de la figure 14.23b.
L'amplificateur opérationnel ne peut maintenir sa tension de saturation du fait de la présence des
diodes Zener qui imposent la tension U? = Uz A- Uci, où Uz est la tension Zener et Ud la tension de
seuil. La protection contre les courts-circuits de PAO provoque sa saturation en courant, et la tension de
sortie devient alors \us\ = U'z ■
L'amplitude des signaux créneaux est donc limitée, par les diodes Zener, à U'z, d'où celle A^Uz
des signaux triangulaires.
Exemple : en utilisant des diodes Zener, de tension d'avalanche 6 V et de seuil 0,6 V, avec
Au = 0,5 , l'amplitude des créneaux vaut 6,6 V et celle des triangles 3,3V.
Remarque : La limitation de l'amplitude des créneaux abaisse la vitesse de balayage de PAO, ce qui
permet d'éviter d'atteindre ou de dépasser sa vitesse maximale de balayage.
480
14. Oscillateurs électriques
X
-U'7
A
U'z
U
7777
Ri
lV
7777
a)
FlG. 14.23.
III. 4. — Modification du rapport cyclique
Rappelons que le rapport cyclique
à l'état haut d'un signal périodique est le facteur positif
défini par le rapport de la durée t\ de l'alternance positive sur la période T du signal :
a/, -
T\
T
La modification du rapport cyclique des signaux du circuit peut être effectuée en agissant sur la constante
de temps de l'intégrateur. En changeant la valeur de la résistance R en fonction du sens du courant,
par exemple, on obtient l'effet désiré. On utilise alors deux diodes montées comme indiqué sur la figure 14.24 où les résistances rp sont des résistances de protection des diodes, ainsi qu'un potentiomètre qui permet de prélever la résistance (3R entre deux de ses bornes.
Si l'AO est en saturation haute, X>i conduit et la constante de temps de l'intégrateur est :
r, = (I3R + rp)C
S'il est en saturation basse, Xb conduit et la constante de temps de l'intégrateur devient :
t2 = [(1 — fi)R + rp]C
V
C
r
R2
co
X
X
44
SL
Km
Ri
7777
7777
FlG. 14.24.
X
7777
FlG. 14.25.
La durée de chaque alternance étant proportionnelle à t\ et T2 , le rapport cyclique a/, s'obtient
selon ;
n
pR + rp
soit Œh TU p
ait
r, + T2
R + rn
en choisissant R
rp .
Oscillateurs électriques
481
III. 5. — Commande de la fréquence
Pour commander en tension un oscillateur de relaxation, on peut utiliser un multiplieur analogique,
par exemple un AD633, dont les performances sont excellentes en terme de linéarité. Prenons l'exemple
du générateur de signaux représenté sur la figure 14.25.
Les diodes Zener sont utilisées pour limiter l'amplitude à U'z et empêcher la saturation en tension sur le multiplieur limité à 10 V. On applique, sur l'autre entrée du multiplieur, une tension de
commande Uc. Ainsi, à l'entrée de l'intégrateur, la tension vaut, en désignant par Km le coefficient du
multiplieur :
ue = ézK», U'ZUC au lieu de iie = ±US(l,
Les équations relatives au calcul de la période deviennent,
tension de PAO comparateur :
AuU^-AHU'z + KnU'zUj-TI^
et
désignant le facteur d'amplification en
- A,,^ = AUU'Z - Km
On en déduit la période :
*AURC
T = t2-t[ = ——
K,nUc
avec
R,
Au = —
R2
pour le comparateur à hystérésis non inverseur. La fréquence / des oscillations est donc proportionnelle
à la tension de commande Uc :
f-
1
Kn
'
u
AA.RC c
Remarque : La relation linéaire entre la tension de commande Uc et la fréquence / des oscillations
n'est pas valable pour tous les oscillateurs de relaxation. Par exemple, pour le multivibrateur astable, on a (cf. Exercices) :
KmUç +^»
R-m Oc
A tl
IV. — APPLICATIONS
IV. 1. — Oscillateur à réseau déphaseur
Un oscillateur à réseau déphaseur est un oscillateur dont la chaîne directe est constituée d'un amplificateur inverseur. Pour respecter le critère de Barkhausen, la chaîne retour doit nécessairement déphaser
de tt les signaux qui lui sont appliqués.
a) Réseau déphaseur passe-bas
L'oscillateur à réseau déphaseur passe-bas, représenté sur la figure 14.26a, fonctionne avec un AO
monté en inverseur. Recherchons d'abord la fonction de transfert de la chaîne retour à partir de l'une de
ses cellules.
Les lois de Kirchhoff, en régime sinusoïdal, appliquées à un seul élément RC passe-bas de la
chaîne, donnent (Fig. 14.26b) :
«2 — Mi
—
^ii
e
t
ii — ii ~ JOoju^
=
ii (1 -\-jRCoj} — jCouy
482
14. Oscillateurs électriques
->C
R
-x
il
-H
Ml
Ud
C
U2
7777
TTTZ
7777
b)
a)
FlG. 14.26.
ce qui s'écrit, sous forme matricielle, en introduisant la fréquence réduite x = RCw :
1
«2
-R '
1 +/X
i-i
—1
u
Après traversée des trois cellules, la matrice de transfert a pour expression :
1
-jx/R
3
-R
1 +jx
'a
c
b
d
avec a = l - x2 + 3jx, b = 4x2 - jx{3 ~ x2), c = -3 + x2 - 4jx et ^ = 1 - 5x2 + jx{6 - x2) .
On sait que le facteur d'amplification de l'ensemble des trois cellules est donné par l'inverse de
l'élément d de la matrice. On trouve donc :
1
Hr{j(o)
2
1 — 5x + jx{6 — x2)
Le critère de Barkhausen, Hci{j(o)Hr(jco) = 1 , avec
HdHr =
Hd
2
2
1 — 5x + jx{6 - x )
= 1
= —Ro/Ry (cf. chapitre 8) donne alors :
d'où
Hd = 1 — 5x' + jx{6 — x-
On en déduit :
x2 = 6
et
Hd = —29
d'où
co =
1
7=
RCVë
et
^
= 29
R\
b) Réseau déphaseur passe-haut
Sur la figure 14.27a, on a représenté un oscillateur à réseau déphaseur passe-haut. Dans ce cas,
il n'est pas nécessaire d'utiliser un suiveur, car la résistance d'attaque de l'AO est la résistance de la
dernière cellule RC.
Les lois de Kirchhoff en régime sinusoïdal, appliquées à un élément CR passe-haut de la chaîne,
donnent (Fig. 14.27b) :
U') = U\ — - ï I
jCo)
et
•
•
U — i\
'
—2
'fit
^ ^
= i\ 1 H—
R
V
jRCo)
—I
~R
1
i
M.
1
-l/R
jR/x "
1 -j/x
i
i
i
ce qui s'exprime, sous forme matricielle, en introduisant la fréquence réduite x = RCco :
Oscillateurs électriques
483
La matrice de transfert de l'ensemble des trois cellules s'en déduit selon :
1«
"Ci
1
X/R
avec ; a = 1
1
.3
r -jXX
b=
4/?
X2
jR/x '
3
c
1 -J/x
d
4R
1 - 6x2 + jx(5 - x2'
T
c = —— +
+j—
et
cl
=
R
(Rx2) J x
-Jx
3R
+ j—
X
On en déduit :
-Jx'
Hr(j ) = 3 =
cl
1 — 6x2 + jx(5 — x2)
co
Le critère de Barkhausen,
= 1 , donne, en explicitant partie réelle et partie imaginaire ;
1 — éx2 — 0
d'où
co =
1
et
Hr —
RCy/6
R
—
-jx"
jx{5 — x2)
29
R2
C
C
x
7777
12
C
X
U\
Ud
7777
7777
7777"
112
R
7À7 7777
7777"
b)
a)
FlO. 14.27.
IV. 2. — Réalisation d'un GBF analogique
Proposons-nous de réaliser un générateur basse fréquence possédant les propriétés suivantes :
i) sorties en créneau (1), en triangle (2), sinusoïdale (3),
ii) gain de sortie réglable en agissant sur un rhéostat R\ ,
iii) impédance de sortie 50 fl,
iv) rapport cyclique réglable en agissant sur un premier potentiomètre R ,
v) commande de la fréquence en agissant sur un second potentiomètre R'.
Le schéma incorporant ces spécifications est celui de la figure 14.28. Quant au schéma du conformateur sinusoïdal, nous l'avons déjà vu (cf. chapitre 12). La tension de sortie us peut être envoyée vers
un oscilloscope afin de visualiser les signaux ainsi que l'influence des divers potentiomètres. Les valeurs des composants qui ont permis une telle réalisation sont les suivantes :
i? = 10m
^ = lka
£ = 10 V,
R\ = 3,3 kO
R\ = R'o = lOkfl
/?2 = 10kn
Rs = 50 kfl
i?'= 100kn
C = 100 nF
484
14. Oscillateurs électriques
K
u
R'
X
C
—K\-\
Intégrateur
ZH
Ri
Rr
R
Rr.
0^
+
-[
lJ
Comparateur
à hystérésis
l>
+
-M-1
7777"
3V 1
Conformateur
sinusoïdal
R.
n
7777
Étage de sortie
Oscilloscope
uK
7777
FIG. 14.28.
CONCLUSION
Rappelons les points essentiels.
1 ) Les oscillateurs quasi sinusoïdaux produisent des signaux à faible taux de distorsion harmonique,
alors que les oscillateurs de relaxation sont des systèmes à deux états qui se caractérisent par des signaux
à fort taux de distorsion harmonique.
2) Un oscillateur à résistance négative possède une structure de système bouclé.
3) Le critère d'oscillation harmonique de Barkhausen, Hd{jco)Hr{j(o) = 1, se traduit par deux
relations provenant des parties réelle et imaginaire : la première donne le facteur d'amplification en
tension de la chaîne directe, la seconde la fréquence d'oscillations du circuit.
4) On contrôle l'amplitude d'un oscillateur quasi sinusoïdal à l'aide d'un élément non linéaire qui
agit sur le facteur d'amplification de la chaîne directe.
5) L'oscillateur à quartz est utilisé pour des applications exigeant une grande stabilité en fréquence,
par exemple pour réaliser un signal d'horloge très régulier.
6) Les oscillateurs de relaxation sont plus faciles à commander en fréquence que les oscillateurs
quasi sinusoïdaux. Aussi, les préfère-t-on dans la réalisation des générateurs basse fréquence.
485
Oscillateurs électriques
EXERCICES ET PROBLEMES
P14- 1. Oscillateur à pont de Wien
Dans l'oscillateur à pont de Wien, représenté sur la figure 14.29, C = 22 nF et /? = 4,7 kO.
1. Établir les fonctions de transfert
de la chaîne directe et Hr{J(o) de la chaîne retour.
2. Dans quelle condition le système présente-t-il des oscillations harmoniques ? Quelle est alors la
fréquence de ces oscillations ?
3. À quelle équation différentielle obéissent la tension d'entrée no




![III - 1 - Structure de [2-NH2-5-Cl-C5H3NH]H2PO4](http://s1.studylibfr.com/store/data/001350928_1-6336ead36171de9b56ffcacd7d3acd1d-300x300.png)