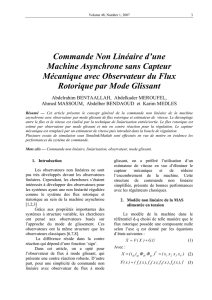
Chapitre 4

Chapitre IV Commande vectorielle avec observateur
69
Chapitre IV
COMMANDE VECTORIELLE AVEC OBSERVATEUR
Dans ce chapitre, il sera présenté l’application des observateurs proposés dans le chapitre II, dans
la commande vectorielle directe à flux orienté. L’intérêt de mettre la technique d’observation c’est de
pouvoir garantire une commande performante, dés lors alors une qualité d’observation insuffisante peut
dégrader rapidement l’ensemble des caractéristiques de l’asservissement.
IV. Application des observateurs dans la commande vectorielle
IV.1 Variation des paramètres du moteur
Le problème général posé en estimation vient du fait qu’on peut observer le comportement
externe d’un système tout en ignorant les lois physiques internes qui le régissent. Le contrôle vectoriel
est étroitement lié à l’identification des paramètres de la machine pour l’estimation du flux rotorique.
Les paramètres sont affectés par les variations de la température et la saturation. Chaque écart, entre les
paramètres physiques du moteur par rapport aux paramètres introduis dans le contrôle vectoriel de la
machine, entraîne des détériorations des performances dynamiques en régime permanent ce qui est en
réalité le cas du couplage entre le flux principal et le couple électromagnétique où des oscillations
transitoires seront observées. En conséquence, l’efficacité du contrôle de la machine décroît. Pour y
remédier, un observateur robuste est utilisé sinon une estimation en temps réel des paramètres sera
effectuée à chaque instant.
Dans notre cas les paramètres ont leurs valeurs extrêmes. On a alors :
+Ω= +Ω=
%1008.1R
%1002.1R
r
s
Pour les inductances on peut tracer la courbe du coefficient de dispersion σ en fonction de l’inductance
mutuelle.
rs
2
m
LL
L
1σ−= , et σ
+== lLLL rs où
(
)
nom
ms LLl −=
σ= 0.006 H
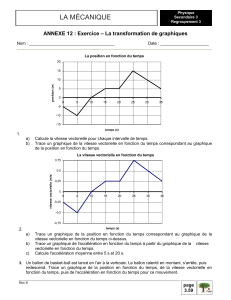
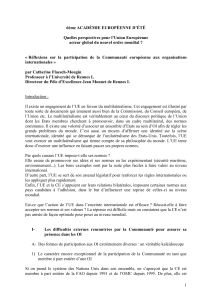
L’inductance mutuelle peut diminuer par 20% de la valeur nominal. Le schéma (4.1) présente la
diminution exponentielle de m
L , et la variation de σen fonction du temps

Chapitre IV Commande vectorielle avec observateur
70
Figure 4.1 – Variation de σetL,L sr en fonction de Lm .
Figure 4.2 – Variation de σetL,L,L msr en fonction du temps .
On constate d'après le schéma qu’il y a une faible variation de la courbe de σet elle a l’allure d’une
droite, on peut la considérer constante égale à la moyenne moy
σ. L’inductance statorique et rotorique
varient selon la variation de l’inductance mutuelle.
IV.2 Commande vectorielle avec observateur de Luenberger
En appliquant l’observateur de Luenberger à la commande vectorielle directe a flux orienté
0 0.2 0.4 0.6 0.8 11.2 1.4 1.6 1.8 2
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
temps(s)
Lm Ls et Lr
σ
moy
σ
0.12 0.125 0.13 0.135 0.14 0.145 0.15
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
Lr et Ls
σ

Chapitre IV Commande vectorielle avec observateur
71
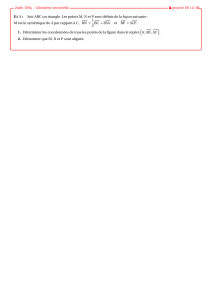
développé au chapitre III, pour l’estimation du flux rotorique. L’application de l’observateur de
Luenberger est basée sur la rapidité et le choix des pôles de l’observateur, dans notre cas il suffit de
choisir un pole ( Pc = 4 x Pr ) où Pr est le pole caractérisé de la machine asynchrone et Pc est le pole
choisi. L’instruction « Matlab function » assure de manière parfaitement synchronisée toutes les taches
liées au contrôle et à l’estimation, on outre et d’une façon spécifique, la réduction du temps de calcul
est obtenue principalement en exploitant le modèle réduit de la machine asynchrone. Le calcul des
différents algorithmes d’estimation en écriture matricielle nous permet d’estimer les deux variables
d’état de flux βα φφ rr et nécessaires pour calculer le module du flux r
Φ et l’angle d’orientation. Le
schéma (4.3) présente une commande vectorielle a flux orienté avec une estimation de flux rotorique
par un observateur de Luenberger :
Figure 4.3 – Commande vectorielle directe avec observateur de Luenberger
Rotation
(α
α
α
α, β
β
β
β) (d,q)
MAS
Découplage
Transformation
(d , q) (a ,b, c)
Onduleur
Transformation
(a ,b, c) (α
α
α
α, β
β
β
β)
rb
ra
r
ˆ
ˆ
ˆ
φ
φ
Φ
β
α
β
α
s
s
s
s
i
i
u
u
βα φφ rr ˆ
,
ˆ
r
ˆ
Φ
ref
r
Φ
e
C
ˆ
ref
ω
ω
ω
ω
Observateur
De
Luenberger
sq
sd
i
i
*
sq
r
sq
sd
*
sd
V
ˆ
i
i
V
Φ
ref
e
C
I
U
+
-
+
-
+
-
sq
sd
u
u
sc
sb
sa
u
u
u

Chapitre IV Commande vectorielle avec observateur
72
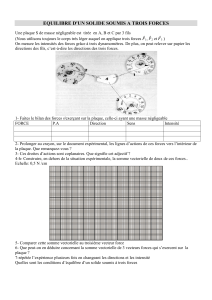
IV.2.1 Résultats de la simulation
Dans un premier temps, nous avons simulé un démarrage à vide et à l’instant t = 1s, nous
chargeons le moteur par un couple résistant de 25 Nm.
Figure 4.4 -Flux rotorique réel, estimé et l’erreur (Wb)
0 0.2 0.4 0.6 0.8 11.2 1.4 1.6 1.8 2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
time (s)
flux rotorique réel et estimé(Wb)
Réel
Estimé
00.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
time (s)
Erreur d'estimation du flux rotorique (Wb)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-400
-300
-200
-100
0
100
200
300
400
Tension d'alimentattion ua (V)
temps (s) 00.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-400
-300
-200
-100
0
100
200
300
400
Tension d'alimentation ub(V)
temps (s)
Figure 4.5 –Tension d’alimentation ua et ub (V)

Chapitre IV Commande vectorielle avec observateur
73
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
1
2
3
4
5
6
7
8
9
10 Courant isd (A)
temps (s) 00.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
5
10
15
20
25
30
35
40
45 Courant isq (A)
temps(s)
Figure 4.6 – Courants isd et isq (A)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
10
20
30
40
50
60
70 Couple (N.m)
temps(s) 00.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
20
40
60
80
100
120
140
160
180 Vitesse mécanique (Rad/s)
Figure 4.8 – La vitesse mécanique (Rad/s) Figure 4.7 – Le couple (N.m)
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%