Groupe des nombres complexes de module 1

Universit´e Claude Bernard–Lyon I
Agr´egation de Math´ematiques : Alg`ebre & g´eom´etrie
Ann´ee 2008–2009
Groupe des nombres
complexes de module 1
A ne pas rater
•Exponentielle complexe et (mesure des) angles.
•Sous-groupes : finis ou denses. Un sous-groupe fini de cardinal npour tout n≥1.
•Recommand´e : tout groupe de Lie compact connexe ab´elien est “une puissance” de U.
•Racines de l’unit´e, polynˆomes cyclotomiques, applications.
•Dual d’un groupe ab´elien fini. Recommand´e : sommes de Gauss, r´eciprocit´e quadratique.
•En rapport avec le point pr´ec´edent : morphismes continus U→Uet s´eries de Fourier.
I Le groupe U
1◦D´efinition, premi`eres propri´et´es
On note Ule noyau du morphisme |·|:C×→R×
+. C’est un groupe compact, connexe, ab´elien.
2◦La suite exacte 1→2πZ−→ R−→ U→1
Proposition L’application ϕ:R−→ U,t7−→ eit est un morphisme de groupes. Il est surjectif,
et son noyau est un sous-groupe discret de R.
D´efinition On appelle πle r´eel positif tel que Ker ϕ= 2πZ. (Sens : un sous-groupe discret de
Rest monog`ene.)
Premi`ere approche : Par restriction de l’exponentielle exp : C→C×, comme sugg´er´e par B.
Bautheney. R´ef. : P. Tauvel, Analyse complexe pour la licence 3,§3.7 (Dunod, 2006).
Deuxi`eme approche (moins ´el´egante mais plus ´el´ementaire) : On d´efinit deux fonctions
cos,sin : R→R, soit par leur d´eveloppement en s´erie enti`ere, soit comme les solutions de
l’´equation diff´erentielle y00 +y= 0 avec les “bonnes” conditions en 0. On en d´eduit que sin0= cos
et que cos0=−sin. Partant : (1) on montre que cos s’annule au moins une fois sur R+; on
note πle double du plus petit z´ero ; (2) on montre que les deux fonctions sont 2π-p´eriodiques ;
(3) on retrouve leur tableau de variations ; (4) on en d´eduit :
Lemme Soit (x, y)∈R2. Il existe un r´eel θ, unique `a 2πpr`es, tel que x= cos θet y= sin θ.
(Dans la premi`ere approche, il faudra citer ce lemme quand mˆeme pour la suite.)
3◦Nombres complexes de module 1, rotations et angles
On consid`ere Ccomme un espace vectoriel de dimension 2, qu’on munit de la norme euclidienne
dont le carr´e est le carr´e du module. On d´efinit une rotation comme une isom´etrie vectorielle
directe. Fixons une base orthonorm´ee, disons (1, i). Alors les rotations sont les applications
lin´eaires dont la matrice est orthogonale et de d´eterminant 1. Notons le groupe SO(2) de ces
matrices. On v´erifie sans peine qu’il est ab´elien. On prouve alors avec ce qui pr´ec`ede :
Lemme L’application ψ:R−→ SO(2),t7→ cos θ−sin θ
sin θcos θest un morphisme de groupes.
Il est surjectif, et son noyau est 2πZ.
Corollaire Les groupes Uet SO(2) sont isomorphes `a R/2πZ.
1

Int´erˆet g´eom´etrique : mesure des angles
En effet, sachant que les rotations s’identifient canoniquement aux angles en dimension 2, on
peut d´efinir la mesure d’un angle αcomme tout r´eel θ∈Rtel que eiθ soit le complexe de module
1 associ´e `a la rotation d’angle α.
Remarque Est-ce que la mesure d’un angle est canonique ? Non, car l’identification entre
rotations et matrices orthogonales d´epend a priori du choix d’une base. En fait, la commutativit´e
de Uet de SO(2) permet de montrer qu’il ne d´epend que du choix d’une orientation.
4◦Sous-groupes de U
Proposition (i) Les sous-groupes de Usont finis ou denses.
(ii) Pour tout n∈N∗,Uposs`ede un unique sous-groupe d’ordre n.
Proposition Un sous-groupe dense monog`ene de Uest “uniform´ement r´eparti” au sens suiv-
ant : si on note ξun g´en´erateur, alors, pour tout intervalle [a, b]⊂[0,2π[, on a :
lim
n→+∞
#k∈[−n, n], ξk∈[a, b]
2n=b−a
2π.
R´ef. : Chambert-Loir, Fermigier, Gianella.
5◦Un zeste de g´eom´etrie
Ce paragraphe enrichit le plan, mais serait un d´eveloppement un peu trop ´el´ementaire.
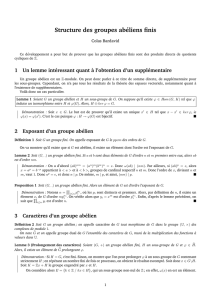
(a) Interpr´etation g´eom´etrique de la loi de groupe
Soit z1, z2∈Uet w=z1z2. On peut construire g´eom´etriquement wcomme intersection du
cercle et de la droite parall`ele `a la droite contenant z1et z2(ou la tangente au cercle si z1=z2)
qui passe par le point 1, autre que 1. En effet, si θiest un argument de zi(i= 1,2), on a :
cos θ2−cos θ1cos(θ1+θ2)−1
sin θ2−sin θ1sin(θ1+θ2)= 0.
Ceci r`egle le cas g´en´erique –pourquoi ? Il faut par ailleurs v´erifier que les cas “d´eg´en´er´es”
marchent aussi : si θ1=θ2[2π] ou si θ1+θ2= 0 [2π].
z1
z2
z1z2
z1=z2
z2
1z1
z2=z−1
1
1
(b) Param´etrage rationnel de U
Notons Jle point de coordonn´ees (−1,0), et, pour t∈R,Ttle point de coordonn´ees (1, t). On
note Mtl’intersection de la droite (JTt) et du cercle U={(x, y)∈R2, x2+y2= 1}. Grˆace
au th´eor`eme de l’angle inscrit et `a l’expression de cos θet sin θen fonction de t= tan(θ/2), on
montre que les coordonn´ees de Mtsont 1−t2
1+t2,2t
1+t2. La correspondance t7→ Mt´etablit une
bijection bicontinue R→U\ {J}, qu’on peut prolonger `a R∪ {∞} → Upar ∞ 7→ J.
Remarque Ceci permet d’identifier U`a la droite projective r´eelle ou au compactifi´e d’Alexandrov
de R. (Si on remplace Rpar R2, les deux ne co¨ıncident pas.)
Lemme Soit t∈R. Alors t∈Q⇐⇒ 1−t1
1+t2,2t
1+t2∈Q.
Application : R´esolution de l’´equation x2+y2=z2dans Z.
2

II Groupes de Lie compacts ab´eliens connexes
Dans ce paragraphe, on appelle groupe de Lie un sous-groupe ferm´e de GLn(R) ou GLn(C). Les
num´eros entre crochets se r´ef`erent `a Mneimn´e–Testard, Groupes de Lie classiques.
Th´eor`eme Un groupe de Lie connexe ab´elien compact est isomorphe `a Un(n= dimension).
D´emonstration : Soit Gun groupe de Lie connexe ab´elien compact et gson alg`ebre de Lie
[§3.4] : c’est une sous-alg`ebre de Lie d’une alg`ebre de matrices. Comme Gest ab´elien, gl’est aussi
[Formule 3.4.1.2 apr`es r´einsertion de exp(−X/n)], si bien que la restriction de l’exponentielle
des matrices `a exp : g→Gest un morphisme de groupe.
De plus, on sait que Gest engendr´e par un voisinage de l’unit´e [Propri´et´e 2.4.2], et que
l’exponentielle est un hom´eomorphisme local de gsur G[Th´eor`eme 3.4.3], si bien que Gest
engendr´e par l’image d’un voisinage de 0 ∈g[voir aussi 3.4.2.1]. Avec le premier fait, cela
entraˆıne que l’exponentielle exp : g→Gest surjective.
Le fait que l’exponentielle soit un hom´eomorphisme local entraˆıne aussi que son noyau est
un sous-groupe discret de g[v´erifier]. Or, comme groupe de Lie, gest isomorphe `a Rnpour
n= dimRg[´evident !]. Et on sait que les sous-groupes discrets de Rnsont de type fini (ce sont
des r´eseaux de l’espace vectoriel qu’ils engendrent). Ainsi, il existe e1, . . . , ed∈gtels que
Ker exp = Ze1⊕ ··· ⊕ Zed.
Ceci montre que, comme groupes topologiques,
G'g/Ker exp '(R/Z)d×Rn−d,
d’o`u l’on d´eduit par l’hypoth`ese de compacit´e que n=d.2
Proposition Pour tout groupe de Lie compact connexe G,exp : Lie G→Gest une surjection.
En effet, l’exponentielle est surjective est sur les groupes connexes compacts ab´eliens, et un
groupe compact est la r´eunion de ses tores maximaux (lesquels sont tous conjugu´es). [R´ef. ?]
III Racines de l’unit´e et cyclotomie
1◦Polynˆomes cyclotomiques : propri´et´es de base
D´efinition, ils sont `a coefficients entiers, irr´eductibles.
R´ef. : Lang, Algebra, Chap. VIII, §3 ou Arnaudi`es–Bertin, Groupes, alg`ebres et g´eom´etrie,
Tome 1, Chap. III, Ex. 20, p. 118 et Chap. IV, §IV.1.
2◦Polynˆomes cyclotomiques : trois applications
Th´eor`eme (Wedderburn) Tout corps fini est commutatif.
R´ef. : [Arnaudi`es–Bertin], Chap. IV, §IV.2.
Th´eor`eme (Kronecker) Un entier alg´ebrique dont tous les conjugu´es sont de module ≤1est
une racine de l’unit´e.
R´ef. : [Arnaudi`es–Bertin], Chap. IV, §IV.3 ou Gourdon, Alg`ebre, II.§5, Probl`eme 7, p. 90.
Th´eor`eme (Dirichlet faible) Pour tout n≥2, il existe une infinit´e de nombres premiers p
tels que p≡1 mod n.
R´ef. : [Arnaudi`es–Bertin], Chap. IV, Ex. 8.
3

3◦Un r´esultat de Lang (?)
Soit f(z) une fraction rationnelle `a coefficients dans une extension finie de Q. On suppose qu’il
existe une infinit´e de racines de l’unit´e ζtelles que f(ζ) est une racine de l’unit´e. Alors il existe
n∈Zet c∈C(de module 1) tels que f(z) = czn.
R´ef : [Lang], Chap. VIII, Ex. 39 (3e ´edition en anglais).
IV Repr´esentations de U
1◦R´eduction aux caract`eres lin´eaires
Proposition Soit n∈N∗et ϕ:U→GLn(C)un morphisme de groupes continu. Alors, il
existe une matrice Adiagonalisable, dont les valeurs propres sont enti`eres, telle que pour tout
t∈R,ϕ(eit) = exp(tA). En d’autres termes, il existe P∈GLn(C)et k1, . . . , kn∈Ztels que
∀t∈R, ϕ eit=P
eik1t
...
eiknt
P−1.
D´emonstration.L’id´ee est de consid´erer le rel`evement `a ϕ:R→GLn(C), t7→ ϕ(eit). C’est
une application continue qui satisfait
∀s, t ∈R, ϕ(s+t) = ϕ(s)ϕ(t).
En particulier, on remarque que ϕ(0) = Id. Fixons t∈R,α > 0 et int´egrons :
Zα
0
ϕ(s+t) ds=Zα
0
ϕ(s) dsϕ(t).
On montre qu’en choisissant αassez petit, l’int´egrale du membre de droite est inversible. Fixons
une norme || · || sur l’espace des matrices n×net ε > 0. Il existe α > 0 tel que
∀s∈[0, α],||Id −ϕ(s)|| ≤ ε.
Mais alors, il vient en int´egrant :
Id −1
αZα
0
ϕ(s) ds=
1
αZα
0
(Id −ϕ(s)) ds=1
αZα
0||Id −ϕ(s)|| ds≤ε.
Puisque l’ensemble des matrices inversibles est ouvert et contient Id, le choix de εassez petit et
d’un αcorrespondant permet d’assurer l’inversibilit´e souhait´ee.
On obtient alors :
∀t∈R, ϕ(t) = Zα
0
ϕ(s) ds−1Zα
0
ϕ(s+t) ds=Zα
0
ϕ(s) ds−1Zα−t
−t
ϕ(s) ds.
Le membre de droite est la diff´erence de deux valeurs d’une primitive, donc c’est une fonction
d´erivable de t, donc ϕest d´erivable. On d´erive alors (∗),
∀s, t ∈R, ϕ0(s+t) = ϕ0(s)ϕ(t),
puis on applique en s= 0 :
∀t∈R, ϕ0(t) = ϕ0(0)ϕ(t).
On reconnaˆıt l’´equation diff´erentielle satisfaite par t7→ exp tϕ0(0). Comme ϕ(0) = Id, on a bien :
ϕ(t) = exp(tA), avec A=ϕ0(0).
Reste `a montrer que A=ϕ0(0) est diagonalisable et `a valeurs propres dans iZ. Le point-cl´e,
c’est que l’image de ϕest un compact. Pour l’exploiter, on jordanise A: il existe des complexes
4

λ1, . . . , λret des entiers d1, . . . , drtels que Aest semblable `a la matrice diagonale par blocs
diag(J(λ1, d1), . . . , J(λ1, d1)), o`u J(λ, d) est le bloc de Jordan d×dde valeur propre λ.
L’exponentielle se calcule bloc par bloc. Les coefficients diagonaux sont exp(λkt), et du fait que
les coefficients de exp(tA) sont born´es lorsque tparcourt R, on en tire que les λksont bien dans
iR. Du fait que ϕ(2π) = ϕ(0), on a mˆeme : λk∈iZ. De plus, si An’est pas diagonalisable,
disons si d1≥2, on voit ais´ement que le coefficient d’indice (1,2) de exp(tA) est teλ1t: pas
born´e ! La proposition en r´esulte.
2◦Caract`eres continus de U : s´eries de Fourier !
R´ef´erence : J. Faraut, Analyse sur les groupes de Lie, Calvage et Mounet, p. 117.
La proposition pr´ec´edente motive l’int´erˆet pour les fonctions χk:U→U,eit 7→ eikt : elles
constituent l’ensemble b
Udes morphismes continus de Udans C∗.
A pr´esent, la th´eorie des s´eries de Fourier peut s’exprimer de la fa¸con suivante :
Proposition Le dual b
U= (χk)k∈Zde Uest une base (hilbertienne) orthonorm´ee de l’espace
des fonctions L2sur U.
3◦Deux am´eliorations
(a) Am´elioration de la convergence R´ef´erence : J. Faraut, Analyse sur les groupes de
Lie, Calvage et Mounet, p. 163.
(b) ´
Equation de la chaleur R´ef´erence : J. Faraut, Analyse sur les groupes de Lie, Calvage
et Mounet, p. 176.
V Caract`eres des groupes finis ab´eliens
Pour Gun groupe fini, on s’int´eresse aux caract`eres lin´eaires, i.e. repr´esentations de dimension
1 de G, i.e. aux morphismes G→C×. Le premier paragraphe montre qu’on ne perd rien `a
supposer le groupe ab´elien, et qu’on est dans le cadre de la le¸con.
1◦Caract`eres lin´eaires d’un groupe quelconque
Lemme Soit Gun groupe et χ:G→C×un morphisme. Alors χse factorise `a travers
l’ab´elianis´e de G. Si Gest fini, l’image de χest contenue dans U.
Sens : Le groupe d´eriv´e [G, G] de G, qui est le groupe engendr´e par les commutateurs [g, h] =
ghg−1h−1(g, h ∈G), est contenu dans le noyau de χ, si bien que χpeut s’´ecrire comme compos´ee
de la projection canonique G→G/[G, G] et d’un caract`ere lin´eaire G/[G, G]→C×.
Remarque (Artin) Soit Gun groupe et χ1, . . . , χn:G→C×des morphismes de groupes.
Alors ils sont lin´eairement ind´ependants en tant que fonctions de Gdans C. C’est utile en
th´eorie de Galois. R´ef. : [Lang], Chap. VIII, §4.
2◦Dual d’un groupe ab´elien fini
Jusqu’`a la fin de ce paragraphe, Gd´esigne un groupe ab´elien fini.
(a) On note b
Gl’ensemble des morphismes de Gdans U. C’est naturellement un groupe pour
la multiplication point par point. Le neutre est le caract`ere constant ´egal `a 1, l’inverse de χest
χ.
Exemple : Soit G=Z/nZ' hξi, o`u ξ∈Uest une racine primitive n`eme de l’unit´e. L’image
de ξpar un caract`ere χ:G→Uest n´ecessairement une racine n`eme de l’unit´e. Inversement,
pour k= 0, . . . , n −1 et ξ`∈G, on pose χk(ξ`) = ξk`, ce qui d´efinit un caract`ere. Noter que
χkχk0=χk+k0, si bien que b
G'Z/nZ.
Remarquons que (χk(ξ`))k,`=0,...,n−1est une matrice de Vandermonde. Quelle est son inverse ?
Proposition Le groupe b
Gest isomorphe `a G(pas naturellement). En particulier, |b
G|=|G|.
5
 6
7
6
7
1
/
7
100%