ts-o15-decouverte-de-l-effet

!"#$%&#'()*+,-./-01-023-44-/0'*552-.0
67%8967%:0
!-.;<=>2-0"0?0")<-=)-@0ABC@<D+-@#0!"#$%&#'()*+,-./-01-023-44-/0'*552-.0
0
%0
0
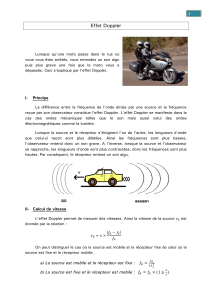
Ecouter(les(sons(suivants(enregistrés(par(un(observateur(fixe(:(
# klaxon(d’un(kangoo(à(l’arrêt((
# klaxon(d’un(kangoo(en(mouvement,((voiture(de(formule(1(
0
%E F+-0.-;>.D+-G#,*+@0H0I>0B>+/-+.01+0@*=05-.J+0-@/#-22-02>0;K;-0/*+/0>+02*=L01-0
23-=.-L<@/.-;-=/0H0
0
0
0
6E I-@0<=4*.;>/<*=@0>55*./(-@05>.02-0/-M/-0)<#1-@@+@0@*=/#-22-@0-=0>))*.10>,-)0,*@0*N@-.,>/<*=@0H0
8E O=0D+*<023-44-/01*552-.0-M52<D+-#/#<202>01<44(.-=)-01-0@-=@>/<*=0>+1</<,-02*.@D+3+=-0,*</+.-0@-0
.>55.*)B-05+<@0@3(2*<L=-01-0,*+@0H0
0
P<2>=0Q0>=<;>/<*=0-44-/01*552-.0
0
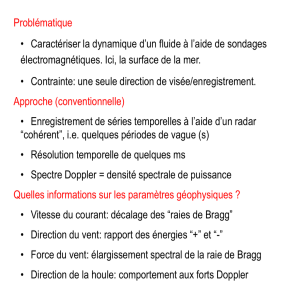
On(effectue(un(enregistrement(vidéo(d’une(cuve(à(onde(lorsque(la(source(vibratoire(se(déplace(:(
voir(vidéo(DOPPLER.(
(
:E F+-05*+,-G#,*+@01<.-01-@0)>.>)/(.<@/<D+-@01-023*=1-0>+0)*+.@01+01(52>)-;-=/0H0
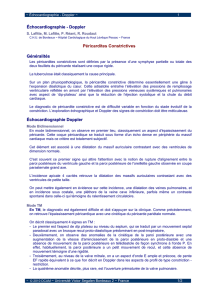
Fig.1 : Ondes à la surface de l'eau : source fixe (Fig. a) et source mobile (Fig. b).
(Fréquence du stroboscope f =
32 Hz
).
&E F+>=102>0@*+.)-0@-0.>55.*)B-013+=0*N@-.,>/-+.R0-@/#)-0D+-0)-2+<#)<05-.J*</02>0;K;-04.(D+-=)-0
D+-02>0@*+.)-R0+=-04.(D+-=)-052+@04><N2-0*+0N<-=0+=-04.(D+-=)-052+@0(2-,(-0H0S+@/<4<-.0,*/.-0
.(5*=@-0-=0,*+@0>55+C>=/0@+.023-=.-L<@/.-;-=/01-02>0)+,-0T0*=1-E0
0
L’effet(doppler(s’applique(à(toutes(les(ondes(dans(tous(les(milieux.(Les(expressions(des(
variations(de(fréquences(Δf(sont(différentes(selon(les(situations(rencontrées.(Mais(dans(tous(les(
cas(le(décalage(doppler(de(fréquence(Δf(dépend(de(la(vitesse(de(la(source(ou(du(récepteur(et(de(
la(célérité(de(l’onde.(
0
U*+@0+/<2<@-.-G02-@0=*/>/<*=@0@+<,>=/-@0Q0
c0Q0)(2(.</(01-023*=1-0V;E@#%WR00v"0Q0,</-@@-01-01(52>)-;-=/01-02>0@*+.)-0V;E@#%WR0
f0Q04.(D+-=)-01-023*=1-0(;<@-05>.02>0@*+.)-R00f$30Q04.(D+-=)-01-023*=1-05-.J+-05>.0+=0*N@-.,>/-+.04<M-0VXGWR0
λ0Q0 2*=L+-+.0 13*=1-0 1-0 23*=1-0 (;<@-0 5>.0 2>0 @*+.)-0 >+0 .-5*@0 V;WR0 λ30Q0 2*=L+-+.0 13*=1-0 5-.J+-0 5>.0 +=0
*N@-.,>/-+.04<M-0V;WE0
Fig.(b(
Fig.(a(
λ(
λ(
λ’’(
λ’(

!"#$%&#'()*+,-./-01-023-44-/0'*552-.0
67%8967%:0
!-.;<=>2-0"0?0")<-=)-@0ABC@<D+-@#0!"#$%&#'()*+,-./-01-023-44-/0'*552-.0
0
60
0
(
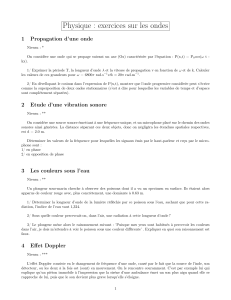
Schéma(représentant(le(déplacement(des(ondes(lorsque(la(source(est(fixe,(puis(lorsqu’elle(est(
en((mouvement(:((
0
Figure 1 : Onde créée par une source au repos et par une source mobile.
0
En utilisant la
YE Z<L+.-0%R0-M5.<;-.0[30-=04*=)/<*=01-0[R0v"0-/0!02*.@D+-02>0@*+.)-0@-0.>55.*)B-01-023*N@-.,>/-+.E0
0
\E O=0+/<2<@>=/02>0.-2>/<*=0[0]0)E!R0;*=/.-.0D+-0𝜆!=𝜆(1−!!
!)E0
0
^E O=01(1+<.-0D+-0𝑓!=𝑓!
(!!!!
!)E0
0
Dans(les(cas(où(la(vitesse(de(la(source(est(faible(par(rapport(à(la(célérité(c(de(l’onde(:(
!
!!!!
!
≃1+!!
!(((((((((((et(((((((((( !
!!!!
!
≃1−!!
!$ (développement$limité)(

!"#$%&#'()*+,-./-01-023-44-/0'*552-.0
67%8967%:0
!-.;<=>2-0"0?0")<-=)-@0ABC@<D+-@#0!"#$%&#'()*+,-./-01-023-44-/0'*552-.0
0
80
0
_E `*=/.-.0D+-0Q0
# 𝑓!=𝑓(1+!!
!)002*.@D+-02>0@*+.)-0-/02-0.()-5/-+.0@-0.>55.*)B-=/R0
# 𝑓!=𝑓(1−!!
!)02*.@D+-02>0@*+.)-0-/02-0.()-5/-+.0@3(2*<L=-=/E0
0
%7E '*==-.0>2*.@023-M5.-@@<*=01-02>01<44(.-=)-0Δ40]043#401+01()>2>L-01*552-.01>=@02-@01-+M0)>@E00
0
%%E O=01(1+<.-023-M5.-@@<*=01-02>0,</-@@-0-=04*=)/<*=01+01()>2>L-0doppler(Δf(-/01-02>0,</-@@-01-0
5.*5>L>/<*=01-023*=1-0)E0
0
%6E I-0a2>M*=013+=-0,*</+.-0T023>..K/0(;-/0+=0@*=0@<=+@*b1>201-04.(D+-=)-0:^70XGE0I*.@013+=0
1(52>)-;-=/R02-0)*=1+)/-+.0>5-.J*</0+=05<(/*=0-=/.><=01-0/.>,[email protected]/0a2>M*==-E0I-05<(/*=0
5-.J*</0+=-04.(D+-=)-01-0&7^0XGE0F+-22-0-@/02>0,</-@@-01-02>0,*</+.-0H0V*=0@+55*@-0D+-02>0,</-@@-0
1+0@*=0-/01-08:7;E@#%W0
0
Rédiger(un(bilan(de(cours(présentant(l’effet(doppler(et(comment(l’utiliser(pour(déterminer(des(
vitesses(de(déplacement.0
1
/
3
100%