Dispositif automatique de compensation des variations de tension

Europâisches Patentamt
European Patent Office
Office européen des brevets
@ Numéro de publication: 0057 340
B1
® FASCICULE DE BREVET EUROPEEN
@> Date de publication du fascicule du brevet: @ Int. Cl.4: H 02 M 1/08, H 02 M 7/12
08.10.86
@ Numéro de dépôt: 81402057.4
® Date de dépôt: 23.12.81
@ Dispositif automatique de compensation des variations de tension du secteur alternatif polyphasé appliqué à un
convertisseur alternatif continu.
m
o
N
10
O
© Priorité: 04.02.81 FR 8102085
§|) Date de publication de la demande :
11.08.82 Bulletin 82/32
@ Mention de la délivrance du brevet:
08.10.86 Bulletin 86/41
@ Etats contractants désignés :
DE FR GB IT NL
Documents cités:
FR-A-1564347
FR-A-2195386
FR-A-2212583
GB-A-2002600
US-A-3335353
US-A-3757230
@ Titulaire: COMPAGNIE INTERNATIONALE POUR
L'INFORMATIQUE Cil - HONEYWELL BULL (dite
CII-HB), 94, avenue Gambetta, F-75020 Paris (FR)
@ Inventeur: André, Gérard, 94 avenue Gambetta,
F-75020 Paris (FR)
Û.
III
Il est rappelé que: Dans un délai de neuf mois à compter de la date de publication de la mention de la délivrance du brevet euro-
péen toute personne peut faire opposition au brevet européen délivré, auprès de l'Office européen des brevets. L'opposition doit
être formée par écrit et motivée. Elle n'est réputée formée qu'après paiement de la taxe d'opposition (Art. 99(1) Convention sur le
brevet européen).
ACTORUM AG

La présente invention concerne un dispositif
automatique de compensation des variations de
tension du secteur électrique alternatif polyphasé,
appliqué à un convertisseur «alternatif-continu».
Ce dispositif s'applique plus particulièrement
aux convertisseurs de type alternatif-continu, de
puissance, utilisés notamment dans l'alimentation
des ordinateurs.
On sait que la plupart des convertisseurs «alter-
natif-continu» et notamment les convertisseurs de
forte puissance, comprennent des redresseurs à
déclenchement contrôlés, connus sous le nom de
thyristors. Ces redresseurs contrôlés sont large-
ment utilisés en électrotechnique, aussi bien dans
la commande des moteurs à courant continu (mo-
teurs de traction par exemple), que dans l'élabo-
ration de tensions continues de forte puissance.
Dans ces convertisseurs, le contrôle de la ten-
sion moyenne redressée s'effectue par action sur
l'angle d'amorçage de chacun des thyristors. Ce
contrôle peut être manuel (pour les moteurs de
traction) ou automatique (pour l'alimentation des
ordinateurs par exemple). Dans ce dernier cas, la
tension de sortie filtrée est généralement compa-
rée à une tension référence et elle est maintenue
constante par action de moyens de régulation qui
agissent sur l'angle d'amorçage de chacun des
thyristors du convertisseur. Dans le cas d'un con-
trôle manuel, les fluctuations de la tension du
secteur alternatif se traduisent par des fluctua-
tions proportionnelles de la tension moyenne re-
dressée. Dans le cas d'un contrôle automatique,
les fluctuations de la tension moyenne redressée
sont compensées par les moyens de régulation
qui agissent sur l'angle d'amorçage des thyris-
tors, dans les limites de rapidité et de dynamique
des moyens de régulation. On voit, donc que la
compensation des fluctuations de la tension du
secteur alternatif d'entrée, effectuée par prélève-
ment de la tension redressée en sortie du conver-
tisseur et par comparaison de cette tension re-
dressée avec une tension de référence, peut, lors-
que ces fluctuations ont une amplitude impor-
tante, être impossible.
Un exemple de convertisseur avec régulation
de la tension redressée est donné dans le brevet
US-A-3 335 353.
Le brevet français FR-A-1 564 347 décrit un con-
vertisseur monophasé commandé par un disposi-
tif permettant de compenser les variations de ten-
sion du secteur sans utiliser des moyens de régu-
lation de la tension moyenne redressée. Pour cela
un générateur de dents de scie produit à chaque
demie alternance de la tension du secteur, un
signal variant en fonction du temps selon la même
équation que la variation de la tension redressée
en fonction de l'angle d'allumage du thyristor et
ce signal a une amplitude proportionnelle à la
tension du secteur. L'allumage du thyristor est
produite lorsque ce signal en dents de scie coïn-
cide avec une tension de référence indépendante
de la tension du secteur. Ce dispositif réalise bien
la compensation recherché à condition que la
tension de référence ne soit pas influencée par les
variations de tension du secteur, ce qui nécessite
un circuit générateur de tension de référence bien
étudié.
Un autre dispositif de compensation des varia-
tions de tension du secteur est décrit dans la
demande de brevet FR-A-2 212 583. Une tension
en dents de scie est obtenue par intégration d'un
signal lié à la tension d'alimentation et superposi-
tion à un signal dépendant d'un autre paramètre
tel que la température. Une impulsion de com-
mande est générée lorsque la tension en dents de
scie est égale à une tension de référence fonction
de la fréquence et/ou de la tension d'alimentation.
Ce dispositif vise à compenser plusieurs paramè-
tres en même temps mais la réalisation proposée
ne permet cependant qu'une compensation ap-
proximative des variations de tension du secteur.
L'invention telle qu'elle est définie dans les re-
vendications a pour objet un circuit de compensa-
tion des variations de la tension du secteur per-
mettant une compensation parfaite au moyen d'un
dispositif simple ne comportant qu'un nombre très
restreint de composants.
D'autres caractéristiques et avantages de l'in-
vention ressortiront mieux de la description qui va
suivre, donnée en référence aux dessins annexés
dans lesquels:
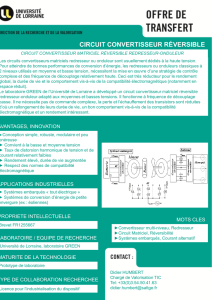
- la figure 1 représente schématiquement un
dispositif automatique de compensation, con-
forme à l'invention, appliqué à un convertisseur
«alternatif-continu»,
- la figure 2 est un diagramme qui représente
les signaux électriques des différentes phases du
secteur, appliqués au dispositif de l'invention et
au convertisseur,
- la figure 3 est un diagramme qui permet de
mieux comprendre le fonctionnement du dispositif
de compensation de l'invention,
- la figure 4 est un diagramme des signaux que
l'on peut observer sur les sorties de certains
moyens du dispositif.
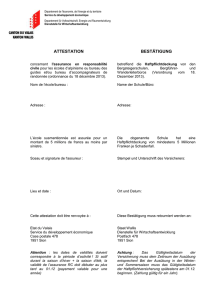
La figure 1 représente schématiquement un dis-
positif automatique de compensation 1 des varia-
tions du secteur électrique alternatif 2, polyphasé,
alimentant un convertisseur alternatif-continu 3.
Les différentes phases du secteur sont désignées
par Ci, Φ2, <1>3' sur la figure. La sortie du convertis-
seur est représentée en S et celui-ci comprend, de
manière connue, pour chacune des phases du
secteur, des redresseurs tels que des thyristors
par exemple, à déclenchement contrôlé par im-
pulsions. Ces thyristors sont désignés par Thi,
Th2, Th3. Les impulsions qui leur sont appliquées
par un générateur d'impulsions 4 présentent une
période réglable pour chaque thyristor, de ma-
nière à contrôler l'angle d'amorçage de celui-ci.
De manière connue, chacun des thyristors peut
être associé à un redresseur telle qu'une diode;
ces diodes pour les différentes phases, sont re-
présentées en Di, D2, D3. Enfin, ce convertisseur
comprend de manière connue une diode D de
roue libre et un filtre constitué par une self L et un
condensateur C. On a désigné par Rs une résis-
tance placée en série avec la self, pour limiter le

courant dans celle-ci. La tension redressée est
dispobible sur la sortie S du convertisseur.
Le dispositif automatique de compensation 1
conforme à l'invention, comprend des moyens 5
pour déterminer les variations de tension à l'en-
trée de chaque redresseur (Th,, Th2, Th3) à déclen-
chement, et des moyens de compensation 6 de
l'angle d'amorçage de chaque redresseur à dé-
clenchement. Les moyens de compensation 6 sont
reliés à une sortie 7 des moyens 5 de détermina-
tion de variation de tension d'entrée. Les sorties
de ces moyens de compensation sont reliées à
des entrées de commande du générateur d'impul-
sions 4, pour régler la période des impulsions de
déclenchement de chaque redresseur à déclen-
chement contrôlé et donc, pour régler l'angle
d'amorçage de chaque redresseur à déclenche-
ment contrôlé.
Comme on le verra plus loin en détail, les
moyens 5 qui permettent de déterminer les varia-
tions de tension à l'entrée de chaque redresseur
et les moyens de compensation 6 de l'angle
d'amorçage de chaque redresseur sont reliés à
chacune des phases Φ1, Φ2, Φ3 du secteur alterna-
tif 2.
Les moyens 5 qui permettent de déterminer les
variations de tension à l'entrée de chaque redres-
seur à déclenchement Th,, Th2, Th3 comprennent
pour chacun de ces redresseurs, des moyens 8
reliés au secteur 2 pour redresser la tension d'en-
trée et des moyens 9 de prélèvement d'une ten-
sion de contrôle Vc dont la valeur est une fraction
de valeur prédéterminée de la tension redressée
en sortie des moyens 8. Les moyens de compen-
sation 6 comprennent, pour chaque redresseur à
déclenchement, un comparateur. Les compara-
teurs associés à chaque redresseur à déclenche-
ment sont référencés 10, 11, 12, sur la figure.
Chaque comparateur, tel que le comparateur 10
par exemple présente une première entrée 13 qui
est reliée à la sortie 7 des moyens de prélèvement
9, et une deuxième entrée 14 qui est reliée à une
sortie de moyens de synchronisation 15, faisant
partie des moyens de compensation 6. Ces
moyens de synchronisation sont reliés aux diffé-
rentes phases Φ1, Φ2, Φ3 du secteur alternatif et
fournissent en sortie, pour chaque redresseur à
déclenchement, un signal de synchronisation qui,
on le verra plus tard, est l'enveloppe des impul-
sions de déclenchement des redresseurs; ce si-
gnal établit une relation linéaire entre les varia-
tions de l'angle d'amorçage de chaque redresseur
à déclenchement, et les variations de la tension
de sortie de celui-ci. Les signaux de sortie des
comparateurs sont appliqués à des entrées de
commande du générateur d'impulsions 4, pour
commander le réglage de la période des impul-
sions de déclenchement de chaque redresseur à
déclenchement et donc pour commander l'angle
d'amorçage de chaque redresseur à déclenche-
ment contrôlé.
Les moyens 8 qui permettent de redresser la
tension d'entrée et qui sont reliés aux moyens 9
pour prélever une fraction de cette tension redres-
sée sont constitués, pour chaque phase du sec-
teur, par un transformateur. Ces transformateurs
sont représentés en T,, T2, T3 sur la figure. Leurs
enroulements primaires sont reliés respective-
ment à chacune des phases Φ1, Φ2, Φ3 du secteur,
tandis que leurs enroulements secondaires ali-
mentent respectivement des ponts redresseurs
P1, P2, P3. Ces transformateurs sont de préférence
des transformateurs abaisseurs de tension. Les
moyens de prélèvement 9, qui sont reliés à la
sortie des moyens 8, sont constitués par un circuit
comprenant une diode de Zener Z reliée en série
avec une réstance R1 de limitation de courant. La
sortie 7 de ces moyens de prélèvement est cons-
tituée par une borne commune à deux résistances
R2, R3 qui sont reliées en série et connectées en
parallèles avec la résistance de limitation R1.
Les moyens de synchronisation 15 compren-
nent pour chaque phase, un transformateur dont
le primaire est relié à la phase correspondante du
secteur et dont le secondaire alimente un circuit
intégrateur par l'intermédiaire d'un redresseur.
Sur cette figure, les transformateurs sont repré-
sentés en T4, Ts, Ts, tandis que les redresseurs
sont représentés en D4, D5, Ds. Les circuits inté-
grateurs sont désignés par 11, 12, 13 et chacun d'eux
est constitué de manière connue, par une résis-
tance R associée à un condensateur C. La sortie
de chaque intégrateur peut être reliée à un détec-
teur de seuil DS qui permet d'assurer la retombée
du signal SYNC de sortie de cet intégrateur. Les
sorties de ces détecteurs de seuil sont reliées aux
deuxièmes entrées des comparateurs 10, 11, 12.
Comme on le verra plus loin en détail, le géné-
rateur d'impulsions 4 de déclenchement des re-
dresseurs Th1' Th2, Th3 du convertisseur peut être
constitué, pour chaque phase du secteur, par une
bascule de détection de seuil (de type trigger de
Schmidt par exemple) dont l'entrée constitue l'en-
trée de commande du générateur et dont la sortie
est reliée à une gâchette de déclenchement du
redresseur correspondant du convertisseur. L'en-
trée de chacune de ces bascules est reliée à la
sortie du comparateur correspondant des moyens
de compensation 15. C'est ainsi par exemple que
sur la figure, la sortie 16 du générateur 4 est reliée
à la gâchette 17 du thyristor Th1' tandis que les
sorties 18, 20, du générateur 4 sont respective-
ment reliées aux gâchettes 19, 21 des thyristors
Th,, Th3-
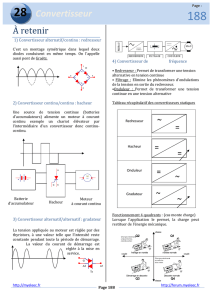
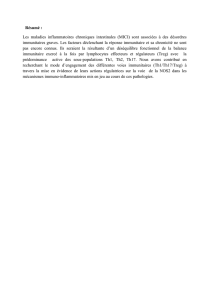
La figure 2 est un diagramme des signaux re-
présentant les tensions entre les différentes pha-
ses Φ1, Φ2, Φ3 du secteur et la ligne neutre ΦN de
celui-ci, en fonction des angles a = ωt. Sur cette
figure, on a désigné par Φ1, Φ2, Φ3 les signaux
représentatifs des différentes phases, tandis que
EΦN désigne la valeur crête de la tension entre
phase et neutre; cette valeur crête peut s'expri-
mer par la relation:
(EΦΦef. désigne la tension efficace entre phases).
La valeur de la tension sur la sortie S, aux
chutes près de tension dans les redresseurs et
dans la self L, est donnée par la relation:

Les différents termes de cette relation sont défi-
nis comme suit:
- Es: valeur moyenne de la tension redressée en
S, en présence d'une charge résistive,
- EΦΦef.: tension efficace entre phases,
- @: angle de retard à l'amorçage des thyristors.
Pour le thyristor Th1' a peut varier dans une
plage qui correspond à EΦ1 > EΦ3,
Pour le thyristor Th2, a peut varier dans une
plage qui correspond à EΦ2 > EΦ1,
Pour le thyristor Th3, a peut varier dans la plage
qui correspond à EΦ3 > EΦ2.
Dans ces relations, on a désigné par EΦ1, EΦ2,
EΦ3 l'amplitude de la tension pour les différentes
phases Φ1, Φ2, Φ3 du secteur.
La valeur instantanée de la tension redressée
(aux bornes de la diode de récupération D) résulte
de la différence entre la tension de la phase cor-
respondant au thyristor conducteur et la tension
de la phase la plus négative à ce même instant.
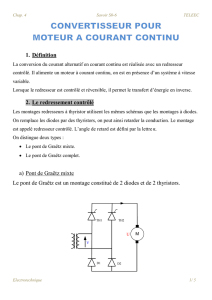
La figure 3 permet de mieux comprendre le
fonctionnement du dispositif de compensation
conforme à l'invention.
Si l'on désigne par Eso la tension moyenne re-
dressée par un angle de retard a nul, il est possi-
ble, à partir de la relation (1) mentionnée plus
haut, d'obtenir la courbe A représentant les varia-
tions de la tension de sortie Es, en fonction de a,
pour une valeur constante de EΦΦ (tension entre
phases). Cette courbe est de la forme:
Si l'on désire faire varier Es linéairement, à
l'aide d'une tension de contrôle Vc, il faut établir
une courbe de variation de a en fonction de la
tension de contrôle, correspondant à la courbe B.
Cette courbe est de la forme:
En considérant par exemple la commande du.
thyristor Th, (voir figure 2), les repères de syn-.
chronisme (peage dans laquelle peut varier l'in-
stant d'amorçage) correspondent aux coïnciden-
ces des valeurs de EΦ1 et EΦ3 (a = 0° et a = 180°).
Il est alors possible d'établir la commande de
gâchette de chaque thyristor, à l'instant où la va-
leur de la tension de contrôle Vc, correspond à la
valeur instantanée d'un signal de synchronisation
Vco, correspondant à la courbe B, d'amplitude
convenable. Dans le dispositif de la figure 1, les
signaux de synchronisation correspondant à la
courbe B, sont désignés par SYNC (figure 1) et
sont obtenus sur les sorties des détecteurs de
seuil DS.
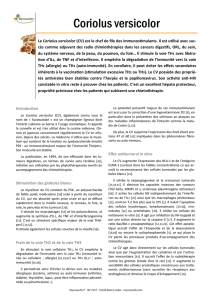
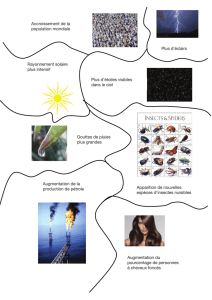
La figure 4 est un diagramme des différents
signaux qui apparaissent sur les sorties de cer-
tains moyens du dispositif. Le diagramme a repré-
sente, en fonction de a = wt, les variations de
tension entre phase et neutre, pour les différentes
phases Φ1 Φ2, Φ3 du secteur.
Les diagrammes b1, b2, b3 représentent les si-
gnaux de sortie de chacun des thyristors Th1, Th2,
Th3; on suppose sur ces diagrammes que chaque
thyristor est conducteur pendant une demi-
période du signal d'entrée.
Les diagrammes c1, c2, c3 représentent les si-
gnaux de synchronisation SYNC obtenus sur les
sorties de chacun des détecteurs de seuil DS des
moyens de synchronisation 15. Sur cette figure,
ces signaux sont désignés par Vco et on a désigné
par Vc la tension de contrôle obtenue à la sortie
7 du circuit de prélèvement 9. C'est cette tension
de contrôle qui est comparée à la tension de sortie
des moyens de synchronisation 15, pour comman-
der l'angle d'amorçage des thyristors du conver-
tisseur.
Enfin, les diagrammes d1, d2, d3 représentent les
impulsions de sortie du générateur 4, appliquées
respectivement aux thyristors Th1' Th2, Th3 du con-
vertisseur 3. Ces impulsions, comme on l'a men-
tionné plus haut, peuvent être obtenues par l'ap-
plication des signaux de sortie de chaque compa-
rateur des moyens de compensation 6, sur les
entrées respectives de bascules de détection de
seuils, dont les sorties commandent les gâchettes
des thyristors correspondants.
On va maintenant donner quelques résultats
numériques concernant le dispositif en relation
avec différentes hypothèses de fonctionnement de
celui-ci.
On suppose tout d'abord que l'on désire obtenir,
en sortie du convertisseur, une tension aussi
constante que possible, quelles que soient les
variations de la tension du secteur, à l'entrée du
convertisseur. On dispose d'une tension entre
phases EΦΦ, à l'entrée du convertisseur et on dé-
sire obtenir une tension Es en sortie, inférieure à
Eso. Pour la tension nominale, EΦΦ.nom., entre pha-
ses, on obtient un angle d'amorçage @nom..
Si on appelle Vcnom. la valeur nominale de la
tension de contrôle Vc et si l'on désigne par
Vco.nom. l'amplitude maximale de la tension de
contrôle Vc, on obtient:
Exemple numérique
Si EΦΦ.nom. = 208 V efficaces, et Es.nom. = 220 V
continu, et si l'on choisit par exemple Vco.nom. =
5 V, on obtient @nom. = 55°, 5 et Vc.nom. = 1,084 V.
Compte tenu de la façon dont les signaux de
synchronisation sont élaborés, leur amplitude Vco
est proportionnelle à la tension du réseau.
On a vu plus haut, la façon dont Vc pouvait, pour
une tension secteur donnée, agir sur la tension de
sortie Es; on va maintenant analyser en fonction
de différentes hypothèses, l'influence de la ten-
sion de contrôle Vc, quand EΦΦ varie.
- Première hypothèse:
On maintient Vc constant quand la tension EΦΦ
entre phases varie. L'amplitude des signaux de
synchronisation (Vco) varie dans la même propor-
tion que EΦΦ. Vc restant constant, l'angle de retard

à l'amorçage a change, ce qui a pour effet de
changer le rapport Es/Eso dans le même sens et
dans la même proportion que EΦΦ.
Eso variant déjà dans le même sens et dans la
même proportion que EΦΦ, la tension de sortie Es
varie d'un rapport:
Dans l'exemple numérique, si EΦΦ varie de
+10% et prend donc la valeur 228,8 V ef, Es varie
de +21%, soit Es = 266,2 V.
- Deuxième hypothèse:
Vc varie dans le même sens et dans les mêmes
proportions que EΦΦ. L'amplitude des signaux de
synchronisation (Vco) varie dans la même propor-
tion que Eoo. V variant dans les mêmes propor-
tions et a restant, Es/Eso reste constant.
Il en résulte que la tension de sortie Es varie
dans le rapport:
Dans l'exemple numérique, si EΦΦ varie de + 10%
et prend la valeur 228,8 V ef, Es varie de + 10% et
prend la valeur Es = 242 V.
- Troisième hypothèse:
Il existe une valeur caractéristique de EΦΦ pour
laquelle à angle de retard a nul, on obtient Es.nom.,
c'est-à-dire que quelle que soit la valeur de la
tension de commande Vc, si EΦΦ descend en des-
sous de cette valeur caractéristique, il n'est plus
possible d'obtenir Es.nom..
Si pour cette valeur, V est nulle, a = 0 et Es
Es.nom..
Il en résulte que si EΦΦ varie entre cette valeur
caractéristique et sa valeur nominale, Vc varie
proportionnellement entre 0 et sa valeur nominale
et la tension de sortie conserve une valeur cons-
tante.
Dans l'exemple numérique, si Es.nom. = 220 V et
EΦΦ.nom. = 208 V ef, pour conserver Es à sa valeur
nominale, avec un angle a nul (donc cos a = 1),
il faut au minimum que EΦΦ 220
soit approxi-
mativement égale à 163 V ef, soit une différence
de -22% par rapport à EΦΦ.nom.
Pour cette valeur, Vc = 0 et lorsque EΦΦ varie
entre -22% et 0, V varie entre 0 et 1,084V la
tension de sortie reste constante et égale à 220 V.
Cette fonction est facile à réaliser à l'aide du
circuit de prélèvement 9 de la figure 2.
La tension VA sur la sortie A des ponts redres-
seurs P1' P2, P3 est déterminée en fonction des
besoins, par le rapport de transformation N des
transformateurs T1' T2, T3. Elle suit proportionnel-
lement les variations de tension réseau. Suppo-
sons pour simplifier que sa valeur nominale est de
20,8 V; quand EΦΦ = 163 V ef., la tension VA sur la
sortie A est égale à 16,3 V. Si Vz (tension aux
bornes de la diode de Zener) vaut 16,3 V, la ten-
sion VB en B est égale à 0 pour EΦΦ = 163 V ef.,
20,8 V pour EΦΦ = 208 V ef. et 22,9 V pour EΦΦ =
229 V ef.
Dans l'exemple décrit, on choisit la valeur de R2
et R3 de façon à obtenir une tension de contrôle
Vc = 1,084V en régime nominal.
On a alors:
Pour avoir Vc.nom. = 1,084 V, il faut:
soit R2 = 3,15 R3.
Il est donc possible, à partir d'un dispositif ex-
trêmement simple, d'obtenir d'excellentes perfor-
mances. Un tel dispositif n'exclut pas la possibilité
d'utiliser un régulateur associé comprenant, de
manière connue, un amplificateur d'erreurs.
1. Dispositif automatique de compensation des
variations de tension (EΦΦ) du secteur électrique
(2) sinusoïdale polyphasé, appliqué à un conver-
tisseur alternatif-continu (3), ce convertisseur
comprenant pour chaque phase (Φ1, Φ2, Φ3) du
secteur, au moins un redresseur (Th1, Th2, Th3)
à déclenchement contrôlé par impulsions, ces im-
pulsions permettant de contrôler l'angle d'amor-
çage (a) de chaque redresseur à déclenchement,
et étant fournies par un générateur d'impulsion (4)
à périodes réglables, pour chaque phase du sec-
teur, ledit dispositif de compensation comprenant
pour chaque phase un générateur (15) de signal
en dents de scie (SYNC, VCO) d'amplitude propor-
tionnelle à la tension du secteur (EΦΦ), un géné-
rateur (5) de tension continue de commande (VC),
des moyens (10, 11, 12) pour comparer lesdits
signaux en dents de scie (SYNC, VCO) et ladite
tension de commande et pour déclencher lesdits
redresseurs (Th1, Th2, Th3) lorsque lesdits si-
gnaux en dents de scie (SYNC, VCO) coïncident
avec ladite tension de commande (VC), caracté-
risé en ce que chacun desdits générateurs (15)
produit ledit signal en dents de scie (SYNC, VCO)
par intégration par rapport au temps des signaux
obtenus par redressement mono-alternance d'un
signal proportionnel à tension du secteur (EΦΦ),
la tension dudit signal en dents de scie (SYNC,
VCO) étant nulle par rapport à la masse du circuit
au début de chaque demi-alternance,
- et en ce que ledit générateur (5) de ladite
tension continue de commande (VC) fournit une
tension (VC) nulle par rapport à la masse du cir-
cuit lorsque la tension du secteur est inférieur à
une valeur déterminée et dont la variation est
proportionnelle à la variation de tension du sec-
teur (EΦΦ) au-dessus de cette valeur déterminée.
2. Dispositif selon la revendication 1, caracté-
risé en ce que ledit générateur (5) de tension de
commande (VC) comprend des moyens (8) reliés
à chaque phase du secteur pour redresser la ten-
sion du secteur et des moyens de prélèvement (9)
d'une tension de commande (Vc) présentant une
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%