Etude dynamique et énergétique d`un pendule élastique horizontal

1
Etude dynamique et énergétique d’un pendule élastique horizontal (Correction)
L’oscillateur étudié est un solide de masse m = 1,090 kg relié à
deux ressorts ayant chacun une constante de raideur k = 4,2
N.m–1.
D’un point de vue physique, tout se passe comme si le solide
était relié à un seul ressort de constante de raideur kT = 2 k = 8,2
N.m–1.
A l’aide du logiciel Latis Pro, nous allons réaliser la
numérisation du mouvement par pointage vidéo.
Le clip étudié est « oscillateur_horizontal.avi ».
L’origine du repère de pointage sera attaché au centre du
mobile ; l’étalonnage se fera sur le diamètre du mobile, D =
14,5 cm. Nous repèrerons la position du centre du disque blanc.
1 – Etude dynamique
On note x(t) l’écart du solide par rapport à la position d’équilibre.
Afficher la courbe représentative de x(t) dans la fenêtre
graphique n°1.
1. Déterminer la période T des oscillations et l’amplitude xm
des oscillations.
T = 2,27 s et xm = 56,5 mm
On pose 2
( ) cos
m
x t x t
T
où φ est la phase à l’origine des dates.
2. Ecrire une expression numérique de x(t) à la date t puis à la date t = 0, en déduire une valeur de
cos φ puis les deux valeurs possibles de φ.
0 cos
m
x t x
D’après la courbe expérimentale,
0 0
x t
. Comme
56,5 0
m
x mm
, il vient
cos 0
On a donc
2 2
ou
.
Terminale S – TP de Physique n°12a
Mécanique

2
3. Pour trancher sur la valeur de φ, calculer l’expression de ( ) ( )
x
dx
v t x t
dt
. Ecrire l’expression de
vx(t) à la date t = 0 et en déduire le signe de sin φ. Conclure alors sur la valeur de φ.
2 2
( ) sin
m
x t x t
T T
A t = 0,
2
0 sin
m
x t x
T
.
En regardant l’allure de x(t) au voisinage de t = 0, on peut constater qu’il s’agit d’une fonction croissante.
Sa dérivée doit donc être positive ; pour que
( )
x t
soit positive au voisinage de t = 0, il faut que
sin 0
:
c’est donc la valeur
2
qui convient ici.
4. En déduire les expressions numériques finales de x(t) et de vx(t).
2
( ) 0,0565 cos
2,27 2
x t t
2 2
( ) ( ) 0,0565 sin
2,27 2,27 2
x
v t x t t
5. Utiliser ces expressions pour créer les variables « x » et « vx » dans le tableur et les calculer.
Vérifier leur ajustement avec les valeurs expérimentales.

3
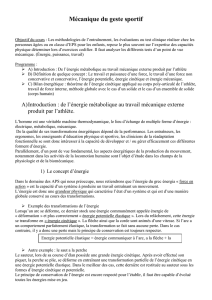
Les variations de l’abscisse x et de la vitesse vx sont correctement modélisées, mais avec un décalage ou
déphasage : les courbes théoriques sont en retard sur les courbes expérimentales. Ceci provient du fait que
la définition de la phase à l’origine, φ, n’est pas exacte. En repassant la vidéo, on s’aperçoit que la
transition entre les 1ère et la 2ème images n’est pas claire (le mobile semble s’être beaucoup déplacé) ; en
réalité, c’est la mise en mouvement du mobile qui n’est pas clairement définie : comment l’a-t-on mis en
mouvement ? Ceci n’apparaît pas sur la vidéo. La vitesse initiale n’est pas nulle, ce qui semble étrange.
Toutefois, sorti de ce décalage, l’accord entre théorie et expérience est tout à fait satisfaisant en termes de
période et d’amplitude.
6. Sachant que 2
T
m
T
k
, exprimer puis calculer kT.
2 2
4
T
m
T
k
et 2
2
4
T
m
k
T
A.N. :
2 1
2
1,090
4 8,35 .
2,27
T
k N m
7. En déduire la valeur de k, et la comparer avec la valeur annoncée initialement.
On en déduit
1
8,35
4,18 .
2 2
T
k
k N m
, soit un écart acceptable de 4,2 4,18
100 0,48%
4,2
.
2 – Etude énergétique
1. a) Ecrire l’expression littérale de l’énergie cinétique Ecsachant que dans ce problème à une
dimension,
2 2
x
v v
.
2
1
2
c
E m v
b) Créer la variable correspondante dans le tableur et calculer les valeurs de l’énergie cinétique.
2. a) Ecrire l’expression littérale de l’énergie potentielle élastique Epe.
2
1
2
pe
E k x
b) Créer la variable correspondante dans le tableur et calculer les valeurs de l’énergie potentielle
élastique.
3. a) Ecrire l’expression littérale de l’énergie mécanique Em.
m c pe
E E E
b) Créer la variable correspondante dans le tableur et calculer les valeurs de l’énergie mécanique.
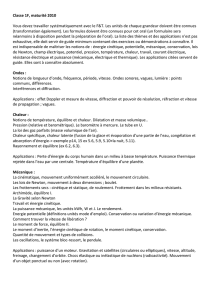
4. Dans la fenêtre graphique n°2, tracer l’évolution des énergies en fonction de t. En reproduire
l’allure et commenter.

4
Les variations temporelles des énergies sont représentée à partir des grandeurs expérimentales (à gauche)
et théorique (à droite). Dans les deux cas, l’énergie mécanique se conserve (elle reste constante) au cours
du temps, signe que les frottements sont négligeables (mobile autoporteur) et que le mouvement peut
durer très longtemps ; les énergies cinétique et potentielle élastique varient de manière contraire : lorsque
l’énergie cinétique est maximale (au passage du mobile par l’origine), l’énergie potentielle élastique est
minimale (les ressorts retrouvent exactement leur position d’équilibre) ; inversement, lorsque l’énergie
cinétique est minimale (au maximum d’amplitude du mouvement), l’énergie potentielle élastique est
maximale (ressorts tendu/comprimé au maximum).
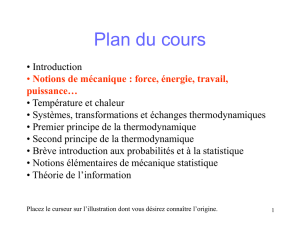
5. Dans la fenêtre graphique n°3, tracer l’évolution des énergies en fonction de x. En reproduire
l’allure et commenter.
A gauche, le graphe expérimental et à droite, le graphe théorique. Tous deux montrent bien l’évolution
des énergie en fonction de l’élongation x du mobile par rapport à sa position d’équilibre centrale :
l’énergie mécanique se conserve bien ; l’énergie cinétique est maximale lorsque le mobile repasse par sa
position d’équilibre centrale, alors que l’énergie potentielle élastique s’annule puisque les ressorts
retrouvent leur longueur d’équilibre ; lorsque l’élongation x est maximale d’un côté ou de l’autre de la
position d’équilibre, les ressorts sont tendus ou comprimés au maximum et l’énergie potentielle élastique
est maximale, alors que l’énergie cinétique s’annule puisque le mobile change de sens de parcours
horizontal.
1
/
4
100%