EXEMPLES DE HAMILTONIENS NON INTÉGRABLES EN

EXEMPLES DE HAMILTONIENS NON INT´
EGRABLES
EN M´
ECANIQUE ANALYTIQUE R´
EELLE
par
Mich`ele Audin
R´esum´e. Je donne des applications des th´eor`emes de non-int´egrabilit´em´eromorphe de Ziglin et Morales-
Ramis `alanon-int´egrabilit´er´eelle de certains syst`emes hamiltoniens.
Abstract. Ishowsome ways of applying the meromorphic non-integability theorems of Ziglin and Morales-
Ramis to the real non-integrability of some Hamiltonian systems.
Introduction
Dans cet article, je donne des exemples d’applications des th´eor`emes de non-int´egrabilit´e
m´eromorphes de Ziglin [13]etdeMorales et Ramis [10, 9]`alanon-int´egrabilit´er´eelle de cer-
tains syst`emes hamiltoniens.
La non-int´egrabilit´e`alaZiglin utilise le groupe de monodromie de l’´equation lin´earis´ee le long
d’une trajectoire, donc le groupe fondamental d’une courbe complexe, susceptible de rec´eler plus de
non-commutativit´equecelui d’une courbe r´eelle.
La non-int´egrabilit´e`alaMorales-Ramis utilise, elle, la th´eorie deGalois diff´erentielle, ou de Picard-
Vessiot, qui ne fonctionne vraiment bien que sur un corps alg´ebriquement clos.
Voil`adoncdeuxraisons pour lesquelles les r´esultats de non-int´egrabilit´esonteng´en´eral complexes.
Je vais illustrer le fait que le caract`ere «local »du groupe de Galois permet souvent de conclure `a
la non-int´egrabilit´er´eelle. D’autre part, certaines courbes ont un groupe fondamental tr`es concentr´e
pr`es de leur partie r´eelle, ce qui peut aussi permettre de conclure (cette id´ee a d´ej`a´et´eutilis´ee par
Ziglin dans [15]).
Dans la plupart de ces exemples, les trajectoires consid´er´ees sont des courbes elliptiques et les
´equations aux variations normales sont des ´equations «de Lam´e».J’aidoncconsacr´eunparagraphe,
g´en´eralisant des m´ethodes de [6]et[15], `al’´etude de ces ´equations.
Je remercie tous ceux qui m’ont fait d´ecouvrir des fautes de frappe ou des erreurs dans une version
pr´eliminaire de cet article et notamment Andrzej Maciejewski qui l’a lue particuli`erement attentive-
ment.
1. Du r´eel au complexe et retour
On ´etudie ici un hamiltonien analytique r´eel,c’est-`a-dire une fonction analytique r´eelle
H:W−−−→R
d´efinie sur une vari´et´eanalytiquer´eelle Wmunie d’une forme symplectique ω,elle aussi analytique
r´eelle. Le champ hamiltonien XHassoci´e`aHpar la relation
iXHω=−dH
Classification math´ematique par sujets (2000).70H05, 53C15, 12Hxx, 34A30, 14H10, 14Pxx.
Mots clefs. Syst`emes hamiltoniens, syst`emes int´egrables, th´eorie de Galois diff´erentielle, syst`eme de H´enon-Heiles,
´equation de Lam´e, monodromie.

2MICHELE AUDIN
est un champ de vecteurs analytique r´eel. Le syst`eme diff´erentiel qu’il d´efinit est le syst`eme hamiltonien
dont on souhaite ´etudier l’int´egrabilit´e:ondiraqu’il est int´egrable s’il est int´egrable au sens de Liouville
avec des int´egrales premi`eres analytiques r´eelles.
Les th´eor`emes de non-int´egrabilit´eque je veux illustrer ici sont des th´eor`emes analytiques.Onne
sait pas les faire fonctionner dans un cadre C∞.Cesontaussi des th´eor`emes complexes,ils utilisent
soit la monodromie, soit legroupedeGaloisdiff´erentiel. Cet aspect complexe est moins strict : on
peut esp´erer en tirer des r´esultats en complexifiant des donn´ees r´eelles.
1.1. Complexification. Il n’est pas tr`es difficile de construire une complexification Wd’une vari´et´e
analytique r´eelle W.C’estune vari´et´eanalytiquecomplexe munie d’un isomorphisme analytique r´eel
de Wsur une sous-vari´et´eanalytiquer´eelle de W.Onpeutmˆeme construire Wde fa¸con qu’elle
soit munie d’une involution anti-holomorphe dont l’ensemble des points fixes soit isomorphe `aW.De
plus, le germe de Wle long de West unique — il n’y a pas d’unicit´eglobale, bien entendu. Voir, par
exemple, [11].
Pour la construction, on peut utiliser un atlas analytique r´eel identifiant les ouverts d’un recou-
vrement de W`adesouvertsdeRm.Leschangements de cartes sont prolong´es analytiquement en
isomorphismes d’ouverts de Cm,qu’on utilise pour construire W.
Dans le cas o`uWest, en plus, une vari´et´esymplectique, on peut partir d’un atlas dont les applica-
tions «cartes »identifient la forme symplectique ωsur les ouvertsdecartes`alaformesymplectique
standard dpi∧dqide R2n.L’existence de telles cartes est assur´ee par le th´eor`eme de Darboux
—unth´eor`eme dont la plupart des d´emonstrations fonctionnent dans la cat´egorie analytique r´eelle.
La vari´et´eanalytiquecomplexeWconstruite par la m´ethode de [11]estautomatiquement munie
d’une forme symplectique complexe qui prolonge la forme ω.Lehamiltonien Hse prolonge `aunvoi-
sinage convenable de Wdans Wen une fonction analytique complexe, laquelle fonction aunchamp
hamiltonien, un champ de vecteurs complexes qui prolonge XH.
Trajectoire de XH.Pour appliquer les th´eor`emes de [13, 10], la premi`ere chose `afaireestdechoisir
une trajectoire non stationnaire de XH.Ilimporteici de pr´eciser ce que «non stationnaire »veut
dire :jevais utiliser, dans les exemples, des trajectoires qui ont bien l’air d’ˆetre stationnaires ! Il s’agira
ici de trajectoires complexes du champ complexe XHsur Wqui ne sontpasr´eduites `aunpoint(ce
qui n’empˆechera pas leurs parties r´eelles d’avoir des composantes r´eduites `aunpoint).
Attention donc : ce qu’on complexifie, c’est la vari´et´eWet la fonction H,pas la trajectoire r´eelle ΓR.
Rappelons que la trajectoire r´eelle d’un point x
0est la courbe int´egrale de XHpassant par x0,en
particulier les trajectoires r´eelles sont connexes.
1.2. Th´eor`emes de non-int´egrabilit´e. On utilise deux corollaires imm´ediats des th´eor`emes de
Morales-Ramis et Ziglin. Il s’agit bien ici d’int´egrabilit´eanalytiquer´eelle. Les th´eor`emes complexes in-
terdisent les int´egrales m´eromorphes complexes,maisn’interdisent pas des int´egrales analytiques r´eelles
qui auraient des singularit´es essentielles non r´eelles. Dans cet article, nous dirons qu’un syst`eme ha-
miltonien est int´egrable au sens analytique (resp. m´eromorphe) r´eel s’il admet n=1
2dim Wint´egrales
premi`eres analytiques (resp. m´eromorphes) r´eelles en involution.
Proposition 1.1.Soit xun point r´eel d’une trajectoire Γdu champ complexifi´eXHsur une complexifi-
cation Wde W.SilegroupedeGalois local en xde l’´equation aux variations normales le long de Γ
n’est pas virtuellement(1) ab´elien, le syst`eme r´eel n’est pas int´egrable.
Proposition 1.2.Si, pour toute complexification Wde W,ilexiste une trajectoire du champ complexifi´e
XHtelle que la monodromie de l’´equation aux variations le long de cette trajectoire contienne deux
´el´ements non r´esonants qui ne commutent pas, le syst`eme r´eel n’est pas int´egrable.
Remarque 1.3.Cespropositions donnent la non-int´egrabilit´eduhamiltonien H
–surlavari´et´eanalytiqueW
–voiresurunvoisinage de la partie r´eelle du niveau de Hcomplexifi´edanslequelsetrouvela
trajectoire consid´er´ee
–ouencoresur un voisinage de la partie r´eelle de la trajectoire complexe de XH
(1)On appelle groupe viruellement ab´elien un groupe de Lie dont la composante neutre est un groupe ab´elien.

NON-INTEGRABILITE REELLE 3
suivant qu’on applique une version globale, locale (voire rationnelle) du th´eor`eme de Morales-Ramis
(voir [10, 9,1,2]). Mais elles ne donnent pas forc´ement le r´esultat analogue au voisinage du niveau
r´eel de Hou de la trajectoire r´eelle de XH.`
Aproposdecette remarque, voir l’exemple trait´eau
§2.2.a.
1.3. Les exemples. Dans les exemples que je vais consid´erer, la vari´et´esymplectique est tout sim-
plement W=R4(ou un ouvert de R4)aveclaformesymplectique ω=dp1∧dq1+dp2∧dq2.On
peut donc utiliser n’importe quel voisinage de R4dans C4comme complexifi´ee W.Onconsid`ere un
hamiltonien «classique »,c’est-`a-dire de la forme
H=1
2p2
1+p2
2+V(q1,q
2)
(on peut penser `al’´energie totale, ´energie cin´etique, plus ´energie potentielle, en consid´erant les qi
comme des positions et les picomme des impulsions). Le syst`eme hamiltonien est
˙q1=p1,˙q2=p2,˙p1=−∂V
∂q1
,˙p2=−∂V
∂q2
.
Dans cette th´eorie (et c’est une de ses difficult´es), la premi`ere chose `afaireestdechoisir une
trajectoire convenable. Pour sp´ecifier les trajectoires utilis´ees, je vais supposer que lechampXHaun
plan symplectique invariant, le plan Pd’´equations q1=p1=0.Cette condition d’invariance s’´ecrit
XH(0,q
2,0,p
2)=0,p
2,0,−∂V
∂q2
(0,q
2),
c’est-`a-dire qu’on doit avoir
∂V
∂q1
(0,q
2)=0.
En d´eveloppant Vcomme fonction analytique de q1,c’estencore dire que
V=1
2a(q2)+b(q2)q2
1+c(q1,q
2)q3
1
pour certaines fonctions analytiques a,bet c.Lestrajectoires contenues dans le plan Pont pour
supports les courbes d’´equations
Ch:p2
2=2h−a(q2),p
1=q1=0.
Remarque 1.4.Siaest un polynˆome, il s’agit d’une famille de courbes hyperelliptiques. Si son degr´eest
au moins 3, le groupefondamental de ces courbes complexes n’est pas commutatif et on peut esp´erer
obtenir des groupes de monodromie assez non ab´eliens.
Le syst`eme hamiltonien est de la forme
˙q1=p1,˙q2=p2,˙p1=−q1b(q2)−q2
1d(q1,q
2),˙p2=−1
2a(q2)+q1e(q1,q
2).
La r´eduction symplectique du fibr´enormalestidentifi´ee au fibr´etrivial(C2×{0})×Ch.Appelons
(Q, P )lesvariables«tangentes »correspondant `a(q1,p
1). L’´equation aux variations normales(2) est
l’´equation diff´erentielle lin´eaire du second ordre
¨
Q+b(q2(t))Q=0
pour q2(t)solutiondusyst`eme
˙q2=p2,˙p2=−1
2a(q2).
Les sous-exemples que je vais consid´erer sont les suivants :
–Lespotentiels
V=1
2q2m
2+q2
1qk
2β(q2)+q3
1c(q1,q
2),
o`umet ksont `apr´eciser et o`uilya,parmilestrajectoires contenues dans le plan P,une
trajectoire r´eelle r´eduite `aunpoint(§3.1).
(2)Je renvoie aux articles et ouvrages originaux [13, 10, 9]et`a[1, 2], dont j’utilise les notations, pour cette notion.

4MICHELE AUDIN
–Cette famille contient un des potentiels ´etudi´es par Ziglin [14]souslenomde«Yang-Mills avec
groupe de jauge SU(2) »,o`ulafamille de courbes Chest une famille de courbes elliptiques et
l’´equation aux variations normales une ´equation «de Lam´e»(§2.2.b).
–Jeconsid´ererai aussi les potentiels de H´enon-Heiles
V=1
2q2
1+Bq2
2−2q2
1q2−2λ
3q3
2
correspondant `a
a(q2)=q2
2B−2λ
3q2,b(q2)=1−2q2
qui donnent lieu, eux aussi, `aune famille de courbes elliptiques et `ades´equations de Lam´e
(§2.2.a). Cet exemple est trait´edans[15], essentiellement par la mˆeme m´ethode. Je le reprends
ici pour illustrer la remarque 1.3.
–Jemontrerai aussi (§2.2.d) que les m´ethodes utilis´ees ici ne donnent rien pour les potentiels dits
«de H´enon-Heiles homog`enes »,o`u
V=1
2−2q2
1q2−2λ
3q3
2.
Un autre probl`eme dans lequel les m´ethodes pr´esent´ees ici permettent de conclure `alanon-int´egrabilit´e
r´eelle est celui des oscillations d’un satellite sur une orbite circulaire (voir [3]).
2. Courbes elliptiques lisses et ´equations de Lam´e
2.1. Groupes de Galois de certaines ´equations de Lam´er´eelles. Les ´equations de Lam´esont
´etudi´ees depuis le dix-neuvi`eme si`ecle, voir [12]. Un rappel exhaustif des propri´et´es de leurs groupes de
Galois est fait dans le chapitre 2 du livre de Morales [9]. Ici, je vais m’inspirer des m´ethodes utilis´ees
dans les articles de Ziglin [14]etIto[6]pourd´emontrer quelques r´esultats simples sur certaines
´equations de Lam´er´eelles qui suffisent `acalculerles groupes de Galois dans les exemples ci-dessous
(§§2.2.a et 2.2.b).
Soit Pun polynˆome de degr´e3
P(x)=4x3−g2x−g3
dont les racines sont suppos´ees simples, de sorte la courbe Cd’´equation y2=P(x)estune courbe
elliptique lisse (priv´ee d’un point). On consid`ere l’´equation diff´erentielle lin´eaire
d2Q
dx2+P(x)
2P(x)
dQ
dx −Ax +B
P(x)Q=0
o`uAet Bsont des param`etres. Appelons ℘la fonction de Weierstrass associ´ee `alacourbeCet faisons
le changement de variable x=℘(t). Notre ´equation devient
(1) ¨
Q−(A℘(t)+B)Q=0
(les coefficients d´ependent du polynˆome P`atravers la fonction ℘). Ces ´equations (sous l’une ou l’autre
forme) sont appel´ees «´equations de Lam´e».
Notons que la singularit´eent=0(oux=∞)estr´eguli`ere en application du crit`ere de Fuchs
(la fonction ℘aunpˆole double en 0). Le groupe de Galois de l’´equation (1) est donc l’adh´erence de
Zariski de son groupe de monodromie. D’autre part, le changement de variable x=℘(t)induit un
revˆetement double
C/Λ−−−→C−−−→P1(C)
(t→ x)ramifi´eenlestroisracinesdePet `al’infini. Ainsi les composantes neutres des groupes de
Galois de nos deux ´equations sontisomorphes.
Le groupe fondamental de la courbe affine Cest engendr´eparlesclasses d’homotopie de deux lacets
αet β—une base du parall´elogramme des p´eriodes — leur commutateur αβα−1β−1est un lacet γ
autour du point `al’infini (t=0).
Ici, je vais supposer que l’´equation est r´eelle, c’est-`a-dire que les coefficients du polynˆome P,ainsi
que les param`etres Aet B,sontdesnombresr´eels.

NON-INTEGRABILITE REELLE 5
La monodromie autour de 0.Remarquons d’abord :
Proposition 2.1.La monodromie autour de 0ne d´epend que de A(et pas de Bni de P). Si An’est pas
de la forme m2−1
4(m∈Z)elleestdiagonalisable et ses valeurs propres sont −exp(±iπ√1+4A).
Remarque 2.2.Si1+4A<0, les valeurs propres sont donc r´eelles et n´egatives.
Remarque 2.3.Quand √1+4A∈ Q,lamonodromieen0estun´el´ement non r´esonant de SL(2; C).
D´emonstration.Oncherche des solutions de la forme tsf(t)pouruncertain s∈Cet une fonction f
analytique au voisinage de 0. En reportant Q(t)=tsf(t)dansl’´equation diff´erentielle, on voit que s
doit ˆetre solution de l’´equation du second degr´e
s(s−1) −A=0
(ici A=limt→0t2(A℘(t)+B)). Si la diff´erence √1+4Aentre les deux racines s1et s2de cette ´equation
n’est pas un nombre entier, on peut d´eterminer les d´eveloppements convergents en 0 de deux fonctions
analytiques f1et f2(voir [12,p.∼198] pour ces r´esultats classiques sur les ´equations diff´erentielles).
On a ainsi deux solutions ind´ependantes ts1f1(t)etts2f2(t). La monodromie le long d’un lacet γfaisant
le tour de l’origine transforme ces solutions par
tsf(t)−−−→e2iπstsf(t).
Elle est donc diagonale dans cette base et ses valeurs propres sont
λ±=exp2iπ 1
2±√1+4A
2=−exp ±iπ√1+4A.
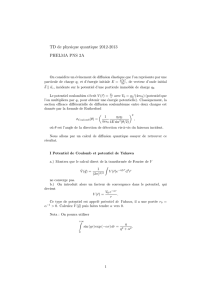
La monodromie le long d’un lacet r´eel. Rappelons que l’´equation est r´eelle, c’est-`a-dire que A,
B∈Ret que P∈R[x]. Supposons de plus (voir la figure 1) que
–lescoefficients g2et g3sont des fonctions analytiques r´eelles d’un param`etre h,
–pourhdans un intervalle ouvert Ide R,lapartier´eelle de la courbe elliptique r´eelle a deux
composantes connexes (le polynˆome P=Phatroisracines r´eelles e1<e
2<e
3),
–lafonctionAx +Best strictement positive sur l’ovale (composante compacte) de cette courbe,
c’est-`a-dire A>0et−B
A<e
1ou A<0et−B
A>e
2(le cas o`uA=0n’estpasint´eressant).
e1e2e3
α
Ax +B>0
Figure 1
On peut choisir, pour repr´esenter un des g´en´erateurs, disons α,dugroupefondamental, l’ovale de
cette courbe. Un th´eor`eme classique de Liapounov ([7], voir aussi [5,p.383]) affirme alors :
Proposition 2.4.Pour tout h∈I,lamonodromielelongdeαadesvaleurs propres r´eelles positives et
distinctes.
D´emonstration.Rappelons la d´emonstration ´el´egante de ce r´esultat qui s’applique `atoute´equation
de la forme
¨
Q=f(t)Q
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%