Fiche Systèmes d`Équations Linéaires

Fiche Systèmes d’Équations Linéaires
MOSE 1003
13 Septembre 2014
Table des matières
Systèmes de 2 équations à 2 inconnues 1
Méthode des combinaisons linéaires .................................... 2
Interprétation géométrique. ........................................ 3
Méthode de Cramer ............................................ 3
Système de 3 équations à 3 inconnues (et plus) 4
Méthode du pivot de Gauss ........................................ 4
Interprétation géométrique ........................................ 6
Systèmes de 2 équations à 2 inconnues
Partons d’un exemple typique, le système
(S)5x−y= 2
2x+ 3y= 7
dont les deux inconnues xet ysont des quantités à déterminer, satisfaisant simultanément les deux égalités.
Définition
Un système est linéaire si les équations sont constituées de constantes et de combinaisons
linéaires des inconnues. Rappelons qu’une combinaison linéaire de plusieurs quantités, par exemple
u, v, w
est
une expression de la forme αu +βv +γw, où α, β, γ sont des réels donnés.
Remarque.
Le système
5x2−xy = 2
2 sin (x)+3y= 7
est non-linéaire. Il contient des termes comme
x2, xy, sin (x)
qui ne sont pas des termes de combinaisons
linéaires. Les méthodes qui s’appliquent à ses systèmes sont bien différentes, bien que la théorie linéaire
constitue le point de départ. Notre cours n’aborde pas de théorie non-linéaire.
Remarque.
Le système
5x+ 3 −y= 2 −5y+x
−1+2x+ 3y=−x+ 7 + 3y−2x

est un système linéaire, comme on peut en rencontrer en pratique, mais il n’est pas bien présenté, du
point de vue de sa résolution. Nous dirons dans ce cours qu’un système est bien présenté si
— Toutes les inconnues sont à gauche et les constantes à droite.
— Chaque inconnue apparait au plus une fois sur chaque ligne.
— Les inconnues sont alignées verticalement.
Exercice : Bien présenter le système ci-dessus.
Méthode des combinaisons linéaires
Cette méthode consiste à chercher une combinaison des lignes du système qui élimine une des inconnues. Par
exemple si
L1
et
L2
sont les deux lignes de
(S)
, on voit que la combinaison 3
L1
+
L2
élimine l’inconnue
y
. On
peut présenter les choses de la façon suivante
5x−y= 2 3
2x+3y= 7 1
17x= 13
Les termes de la nouvelle lignes viennent de 3
×(5x)
+ 1
×(2x)
= 17
x
et 3
×(2)
+ 1
×(7)
= 13. On cherche
alors une autre combinaison qui élimine l’inconnue
x
, en l’occurrence la combinaison 2
L1−
5
L2
. Cela donne
(L1)
(L2)
5x−y= 2 32
2x+3y= 7 1−5
17x= 13
−17y=−31
On en déduit que
x=13
17 et y=31
17
Réciproquement, on vérifie bien que
5×13
17 −1×31
17 = 2
2×13
17 +3 ×31
17 = 7
On a donc trouvé la solution unique du système (S).
Remarque.
Partant du système, on a tiré des conséquences nécessaires pour aboutir à la conclusion que
x
=
13
17 et y=31
17 . C’est ce qu’on appelle résoudre le système en raisonnant par implication.
Ce mode de raisonnement est courant en théorie des équations. Une de ses propriétés générales est qu’il
ne peut pas perdre de solution du système, par contre il peut produire des fausses solutions qui ne
vérifient pas le système initial.
Lorsqu’on résout un système par implications, il faut donc vérifier systématiquement que les solutions
trouvées vérifient le système initial. Lorsque ce n’est pas le cas, il peut s’agir d’une fausse solution à
ignorer ou ... d’une erreur de calcul !
Impossibilité.
Dans cette méthode, il arrive parfois que les deux inconnues disparaissent simultanément
dans une combinaison linéaire, par exemple dans le cas
3x−6y= 2 4
−4x+8y= 1 3
0 = 9
La nouvelle relation, qui est une conséquence du système, ne peut être satisfaite. On conclut que ce système
n’admet aucune solution.
2

Equations proportionelles.
Lorsque les deux inconnues disparaissent simultanément, il arrive qu’on voit
apparaitre une équation triviale 0=0, comme dans le cas suivant
3x−6y=−94
−4x+8y= 12 3
0 = 0
La conclusion à en tirer est que les deux lignes du système sont proportionelles. Ici,
L2
=
−4
3L1
. Le système
est alors équivalent à une seule des deux équations, l’autre n’apportant aucune contrainte supplémentaire sur
les inconnues.
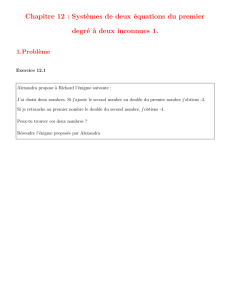
Interprétation géométrique.
On interprète les valeurs inconnues xet ycomme les coordonnées d’un point Px
ydu plan cartésien.
Propriété Etant donné trois réels a, b, c, l’ensemble Edes points Px
ydu plan vérifiant l’équation
ax +by =c
est une droite affine du plan, sauf si
a
=
b
= 0, auquel cas
E
peut valoir l’ensemble vide (si
c6
= 0) ou le plan
tout entier (si c= 0).
En conséquence, lorsque les lignes sont non triviales, l’ensemble des points solutions du système
(S)
est
l’intersection des deux droites affines définies par les deux équations du système.
Figure 1 – Interprétation géométrique de (S)
Cela laisse peu de possibilités pour l’ensemble des solutions :
1.
Soit les droites sont concourantes en un point et
(S)
admet
une solution unique
(on pourrait dire
que c’est le cas générique)
2.
Soit les droites sont parallèles non confondues, il n’y a alors pas de point d’intersection et donc
pas de
solution
3. Soit les droites sont confondues, il y a donc une infinité de solutions (une droite entière).
Il faut ajouter à ce tableau le cas où il y a une équation de la forme 0 =
C
, ou
C
est une constante non nulle,
qui rentre dans le cas pas de solution, et le cas où l’une des équations, ou les deux, est de la forme 0=0, qui
rentre dans le cas infinité de solution (une droite ou le plan tout entier).
Méthode de Cramer
Partons du système théorique suivant
(St)ax +by =u
cx +dy =v
3

Définition On appelle déterminant de (St)le nombre
det (St) = ad −bc =
a b
c d
La notation traditionelle sous forme d’un tableau entre deux barres verticales (et non pas des parenthèses ou
des crochets) constitue une mnémotechnique utile, la valeur du déterminant est le produit des termes de la
diagonale descendante moins le produit des termes de la diagonale montante.
Théorème Le système (St)admet une unique solution si et seulement si
det (St)6= 0 (1)
Cette unique solution est donnée par les formules de Cramer
x=
u b
v d
det (St)=ud −vb
ad −bc et y=
a u
c v
det (St)=va −uc
ad −bc
Remarque.
On se souvient facilement de ces formules si on remarque que les déterminants qui apparaissent aux
numérateurs des formules ne sont autres que le déterminant de
(St)
dans lequel on remplace la colonne
de xou de yselon le cas par le second membre du système.
Dans le cas du systéme (S)du début, la méthode de Cramer donne
det (S) =
5−1
2 3
= 5 ×3−2×(−1) = 17 6= 0
Il y a donc une solution unique qui vaut
x=
2−1
7 3
17 =2×3−7×(−1)
17 =13
17 et y=
5 2
2 7
17 =5×7−2×2
17 =31
17
Ces formules s’obtiennent facilement en appliquant la méthode des combinaisons linéaires au système abstrait :
(L1)
(L2)
ax +by =ud−c
cx +dy =v−ba
(ad −bc)x=ud −vb
(ad −bc)y=va −uc
Lorsque le déterminant est nul, on en déduit l’impossibilité du système ou la proportionalité des équations,
donc aucune solution ou une infinité. Lorsque le déterminant est non nul, on vérifie que l’unique solution
obtenue n’est pas une fausse solution (elle satisfait le système initial), d’où le théorème.
Dans le cas des systèmes 2x2, la méthode de Cramer est particulièrement conseillée dans les systèmes à
paramètres, comme le montrent les feuilles d’exercices.
Système de 3 équations à 3 inconnues (et plus)
A titre d’exemple, intéressons nous au système bien présenté ci-dessous
(S)
x+y+ 7z=−1
2x−y+ 5z=−5
−x−3y−9z=−5
Méthode du pivot de Gauss
C’est la méthode la plus efficace dans le cas général. Elle se présente sous une forme algorithmique qu’on
détaille ici.
4

Itérations.
Étape 1 :
On choisit à gauche du système un terme non nul qu’on appelle terme pivot. On l’encadre dans
le système :
x+y+ 7z=−1
2x−y+ 5z=−5
−x−3y−9z=−5
Ce choix arbitraire de terme pivot définit une ligne pivot (celle qui contient le terme pivot), une colonne pivot
(idem) et une variable pivot (l’inconnue qui est encadrée).
Étape 2 :
On ajoute à chacune des autres lignes un multiple de la ligne pivot, par exemple on peut écrire
x+y+7z=−1
2x−y+5z=−5 1p
−x−3y−9z=−5 3p
pour signifier qu’on va ajouter 1 fois la ligne pivot à la ligne 2, et 3 fois la ligne pivot à la ligne 3. Les multiples
sont choisis de façon à éliminer la variable pivot dans ces lignes. Cette opération conduit au système
x+y+7z=−1
3x+12z=−6
2x12z=−8
Étape 3
=
Étape 1
On recommence à choisir un terme pivot en suivant la règle suivante : ne jamais
prendre deux fois un terme pivot dans la même ligne ou dans la même colonne. Naturellement, il faut toujours
que le terme pivot soit non nul.
x+y+7z=−1−1
2p
3x+12z=−6−3
2p
2x12z=−8
On a indiqué ici à droite les opérations qu’on s’apprête à faire.
Étape 2 le retour : On obtient maintenant
+y+z= 3
−6z= 6
2x12z=−8
On voit le système se creuser peu à peu, avec de plus en plus de termes nuls.
Étape 3
=
Étape 1, encore
On choisit le dernier pivot possible. Pour le bon fonctionnement de la méthode,
il importe de répéter les étapes 1 et 2 jusqu’à ce qu’on ne puisse plus prendre de terme pivot. On prend soin
de garder les pivots précédents entourés.
+y+z= 3 1
6p
−6z= 6
2x12z=−8 2p
Étape 2 Il reste maintenant
+y= 4
−6z= 6
2x= 4
5
 6
7
6
7
1
/
7
100%