Module 2 : Optimisation du fonctionnement d`un ascenseur

Projet d’Investigation et d’Intégration 2016-2017
!
!
!
Formation Ingénieur 1ere année - 2016-2017
Projet d’Investigation et d’Intégration (P2I)
Module'2':'
Optimisation'du'
fonctionnement'd’un'
ascenseur

Projet d’Investigation et d’Intégration 2016-2017
1
I!–!Cahier!des!charges!du!projet'
' '
1. Introduction!!
Le'projet'«'Optimisation'du'fonctionnement'd’un'ascenseur'»'marque'une'nouvelle'étape'dans'les'
activités'de'l’UV.'Après'quelques'semaines'd’introduction'à'la'conception'et'à'la'mise'en'œuvre'de'
circuits'électroniques'simples,' l’heure' est' venue'd’aborder' une'activité'd’ingénierie'plus' complète.'
Cette'activité'est'un'véritable'mini-projet'par'équipe.'Elle'est'conçue'comme'le'moyen'd’acquérir'les'
premiers' savoir-faire' concrets' qui' vous' permettront' ultérieurement' de' gérer' en' autonomie' de'
véritables'projets.'Pour'parvenir'à'cet'objectif,'il'a'été'nécessaire'd’organiser'et'structurer'le'projet,'
qui'devient'ainsi'un'projet'guidé.'
'
'
2. Le!problème!
Votre'équipe'd’ingénieurs,'membre'd’un'bureau'd’essais,'a'signé'un'contrat'pour'réaliser'une'étude'
au'profit'd’un'grand'groupe'industriel'chargé'd’installer'des'ascenseurs'dans'une'tour'de'50'étages.'
Dans'ce'type'd’ascenseur,'au'vu'de'la'longueur'des'câbles'utilisés,'se'manifestent'inévitablement'des'
phénomènes'd’élasticité'qui'se'traduisent'par'des'oscillations'de'la'cage'de'l’ascenseur'autour'de'sa'
position' moyenne.' Du' fait' de' la' fréquence' de' ces' oscillations,' le' fait' n’est' pas' particulièrement'
gênant'tant'que'l’ascenseur'n’est'pas'stoppé'à'un'niveau.'Mais'il'n’en'va'pas'de'même'à'l’arrêt.'
Profitant'de'l’expérience'acquise'sur'd’autres'tours'déjà'en'service,'on'a'observé'que'lorsqu’il'stoppe'
à' un' niveau,' l’ascenseur' continue' dans' certaines' circonstances' à' osciller' autour' de' sa' position' de'
repos,'parfois'de' manière'importante'(phénomène'd’arrêt'partiel).'Ceci'induit' une'gêne'très'réelle'
pour' le' franchissement' des' portes,' en' particulier' avec' des' objets' roulants' (chariots' parfois'
lourdement' chargés,' fauteuils' roulants…).' Mais' il' a' également' été' observé' que' ce' phénomène'
gênant'ne'se'produit'pas'toujours.'Parfois,'l’ascenseur'stoppe'et's’immobilise'parfaitement'!'Ce'type'
d’arrêt'est'qualifié'd’arrêt'total.'
Bien' entendu,' il' existe' des' solutions' concrètes' à' ce' problème' comme,' par' exemple':' amortir' les'
oscillations'à'l’aide'd’amortisseurs'spéciaux'ou'bien'prévoir'un'dispositif'qui'bloque'mécaniquement'
l’ascenseur' lorsque' la' machinerie' est' stoppée.' Ces' solutions,' parfois' complexes,' sont' viables' mais'
l’entreprise' voudrait' tout' ' de' même' en' savoir' plus' sur' le'phénomène' qui' est' à' l’origine' de' ce'
problème'd’apparence'aléatoire,'mais'en'réalité'tout'à'fait'déterministe.'
'
2.1 Informations!complémentaires!
Les' experts' ont' déterminé' que' le' phénomène' d’arrêt' partiel' dépend' de' plusieurs' paramètres'tels'
que' la' raideur' des' câbles,' la' vitesse' de' montée' de' l’ascenseur,' sa' masse,' le' nombre' d’étages'
parcourus,'le'sens'de'son'déplacement,'et'bien'd’autres.'Tous'les'paramètres'physiques'du'dispositif'
étant'normalement'fixés'une'fois'pour'toutes'lorsque'l’ascenseur'est'en'service,'seuls'3'paramètres'
sont'susceptibles'de'varier'fréquemment'au'cours'de'son'utilisation':'sa'masse'(qui'change'avec'sa'
charge'utile),'la'longueur'et'le'sens'de'son'déplacement'(le'nombre'd’étages'à'franchir,'en'montée'
ou'en'descente).''
Il'est' aussi'un'paramètre'qui' ne' varie'pas'naturellement,'mais'peut'techniquement'très'facilement'
être'modifié':'la'vitesse'de'déplacement'de'l’ascenseur.'
Hypothèse':/ on/ suppose/ ici/ cette/ vitesse/ constante/ d’un/ bout/ à/ l’autre/ du/ déplacement.' L’étude/
demandée/ne/tiendra/pas/compte/d’éventuelles/phases/d’accélération/et/de/décélération,/mais/il/est/
sous-entendu/qu’il/sera/aisé/de/raffiner/ensuite/les/résultats/fournis/pour/tenir/compte/de/l’existence/
de/ces/phases/de/mouvement/spécifiques.''

Projet d’Investigation et d’Intégration 2016-2017
2
Or'd’après'les'premières'observations'réalisées,'il'semblerait'que'pour'chaque'combinaison'[masse/;/
longueur/;/ sens],' il' existe' au' moins' une' vitesse' particulière' de' déplacement' qui' permet' d’obtenir'
«'naturellement'»'un'arrêt'total'de'la'cabine.''
La' question' que' se' pose' le' fabricant' des' ascenseurs' est':' connaissant' les' paramètres' d’un'
déplacement'de' la' cabine' au' moment'où' les'passagers'sélectionnent'leur'destination'(le'dispositif'
est' doté' d’un' capteur' d’effort' qui' permet' de' mesurer' en' temps' réel' la' masse' totale),' peut-on!
calculer!de!manière!prédictive,!puis!régler,!la!vitesse!de!déplacement!à!la!valeur!qui!permettra!un!
arrêt!total!?!
'
2.2 Votre!mission!
Il'vous'est'demandé'de':'
ü modéliser'et'simuler'le'plus'précisément'possible'la'trajectoire'
!
x t
( )
'de'l’ascenseur,'
ü vérifier' par' simulation' si' le' phénomène' d’oscillations' résiduelles' se' produit' effectivement' dans'
certains'cas'et'pas'dans'd’autres,'
ü proposer'une'solution'concrète'(si'elle'existe)'pour'obtenir'un'arrêt'total'de'l’ascenseur'pour'une'
combinaison'[masse/;/longueur/;/sens]'donnée':''
o Quelle'valeur'donner'à'la'vitesse'de'déplacement'de'l’ascenseur'?''
o Comment'déterminer'cette'valeur'sans/passer/par/une/phase/de/tâtonnement/expérimental'
(considéré'comme'trop'aléatoire'et'fastidieuse)'?''
Enfin,'en'conclusion'du'projet':'
ü Peut-on' en' déduire' une' méthode' permettant' de' gérer' toutes' les' situations' (combinaisons'
[masse/;/longueur/;/sens])'possibles'?'
'
2.3 Livrables!du!projet!
• Vous' fournirez' un' rapport'technique' comportant' tous' les' éléments' d’information' et'
d’explications'sur'la'méthode'que'vous'suggérez'd’adopter'pour'procéder'au'réglage'de'la'vitesse'
de'déplacement.'Vous'traiterez'à'titre'd’exemple'le'cas'de'la'combinaison'de'paramètres'définie'
ci-dessous,'correspondant'à'un'modèle/réduit.'
Pour!vous!former!au!travail!en!équipe!et!rassembler!la!documentation!nécessaire!à!l’écriture!de!
votre!rapport,!vous!utiliserez!un!dossier!“technique”,!partagé!avec!votre!enseignant!P2I,!que!vous!
développerez!et!mettrez!à!jour!en!continu!durant!le!projet,!notamment!en!y!consignant!les!relevés!
de!conclusions!de!vos!réunions!hebdomadaires.!
• Afin'de'prouver'la'validité'de'votre'méthode,'vous'appliquerez'votre'méthode'à'un'modèle'réduit'
d’ascenseur':' une' maquette' à' échelle' réduite' pour' laquelle' la' combinaison' des' données'
deviendra' [masse/de/ l’ordre/ de/ 75/ g/ ;/ longueur/ de/ déplacement' =' 1,00' m/;/ sens/ =/ montée].'
L’assemblage' et' la' mise' au' point' de' cette' maquette' entrent' aussi' dans' votre' mission.' La'
démonstration'de'son'fonctionnement'sera'un'des'points'd’évaluation'du'projet.'
Important!:!à!l’instar!d’un!véritable!ascenseur,!l’arrêt!devra!se!faire!automatiquement,!et!de!
manière!définitive,!à!l’aide!d’un!détecteur!optique!de!votre!fabrication.!
• Vous'fournirez'un'enregistrement'vidéo'montrant'le'fonctionnement'optimisé'de'votre'ascenseur'
stoppant'sans'oscillation'et,'surtout,'vous'fournirez'lors'd’une'présentation'finale'(à'l’oral)'tous'
les'détails'sur'les'travaux'réalisés'pour'parvenir'à'cette'trajectoire'optimisée.'
'
'
'
'
'

Projet d’Investigation et d’Intégration 2016-2017
3
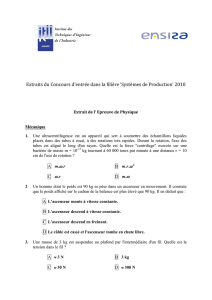
3. La!maquette!d’ascenseur!
Le' dispositif' étudié' est' constitué' d’un' treuil' auquel' une' charge' est' suspendue' par' l’intermédiaire'
d’un' ressort.' Le' ressort' matérialise' l’élasticité' des' câbles' à' l’échelle' d’une' petite' maquette'
expérimentale.'
• Le' treuil' hisse' une' charge' pesante.' Le' fonctionnement'du' moteur' électrique' du' treuil' est'
interrompu'automatiquement'lorsqu’un'certain'niveau'est'atteint'par'la'charge.''
• L’arrêt'est'provoqué'par'l’interruption'd’un'faisceau'optique.'
• La'vitesse'du'treuil'dépend'de'la'charge'«'ressentie'»'(le'couple'résistant'exercé'sur'la'poulie'du'
treuil).'En'particulier,'elle'fluctue'en'fonction'des'oscillations'de'la'charge.'
'
Schéma!de!principe!de!la!maquette!
'
'
'
'
4. La!méthode!:!Modélisation!–!Simulation!-!Expérimentation!
Vous'allez'tout'd’abord'écrire'les'équations'régissant'le'comportement'de'votre'maquette,'à'partir'
des'lois'physiques'fondamentales'de'la'mécanique'statique'et'dynamique.'C’est'la'modélisation'du'
problème.'Il'vous'faudra'donc'identifier'les'paramètres'qui'interviennent'dans'ces'équations,'pour'
ensuite' “coder”' ces' équations' en' langage' informatique' (Matlab/Octave),' ce' qui' constituera' votre'
outil' de' simulation'du' comportement' de' la' maquette.' Afin' de' vérifier' que' votre' simulateur' rend'
compte' de' manière' réaliste' du' comportement' réel' de' la' maquette,' vous' réaliserez' des'
expérimentations'sur' cette' maquette' et' comparerez' les' résultats' à' ceux' de' la' simulation.' Il' vous'
faudra' pour' cela' mesurer' un' certain' nombre' de' paramètres' directement' sur' la' maquette.' Les'
grandeurs'utiles'que'vous'utiliserez'dans'la'modélisation'sont'définies'dans'le'tableau'suivant':'
'
Charge
Moteur
Poulie
Arrêt automatique
Ressort
Commande moteur
Position de départ
Position finale
Tables
Position de départ
Charge suspendue et
immobile
Charge
Déplacement

Projet d’Investigation et d’Intégration 2016-2017
4
!
m
':'masse'
!
k
':'raideur'du'ressort'
!g
':'gravitation'
!
x t
( )
':'position'de'la'masse'à'
!
t
'
!
X t
( )
':'position'du'point'A'd’attache'à'
!
t
' '
!!
X0
( )
':'position'du'point'A'd’attache'à'
!!
t=0
' '
!XV
':'position'du'point'd’attache'à'vide'
λ
':'facteur'd‘amortissement'(résistance'de'l’air)'
!LV
':'longueur'à'vide'du'ressort'
!!L0
':'longueur'du'ressort'en'charge'statique'
Ω
':'vitesse'de'rotation'de'la'poulie'motorisée'
!
Ω0
':'vitesse'de'rotation'de'la'poulie'«'Sans'Charge'»'
!
C
':'couple'exercée'par'la'charge'sur'la'poulie'
(couple'résistant'appliqué'au'motoréducteur)''
ρ
':'rayon'de'la'poulie'
α
':'paramètre'électromécanique'du'
motoréducteur,'ratio'de'la'réduction'de'vitesse'
angulaire'au'couple'
!
C
qui'la'provoque!
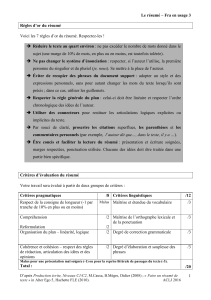
è'Notez'que' l’état'initial'du' mouvement'est'un'état'de' charge'du' ressort'(charge' immobile' mais'
suspendue).''
Les'deux'variables'caractéristiques'du'mouvement'sont'
!
x t
( )
,'ordonnée'de'la'charge'sur'l’axe'
!
Ox
,'
et'
!
X t
( )
,'ordonnée'du'point'd’accrochage'du'ressort.'
Masse
(m)
Ressort
(k)
Poulie
motorisée
(Ω=0)
Support
P=mg
R=-P
X=0
0
Poulie
motorisée
(Ω=0)
P=mg
X(0)
0
Lv
L0
Poulie
motorisée
(Ω)
P=mg
X(t)
0
x(t)
x,X
x,X
x,X
T=-P
T
A vide
Statique (t=0)
Dynamique (t)
A
A
A
G
G
G
0
0
-XV
'
4.1 Modélisation!physico-mathématique!de!la!trajectoire!
A'partir'du'moment'où'le'dispositif'est'mis'sous'tension,'la'poulie'actionnée'par'le'motoréducteur'
soulève'la'charge'jusqu’à'interruption'du'moteur'par'le'dispositif'd’arrêt.'Le'mouvement'de'la'charge'
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%