Machine synchrone

1
Machine synchrone
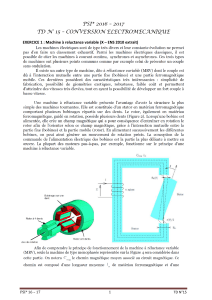
Notations complémentaires
Pour alléger les notations a,b , c désignent les variables statoriques.
D désigne les variables relatives à l’amortisseurs sur l’axe d
Q désigne les variables relatives à l’amortisseur sur l’axe q
f désigne les variables relatives à l’inducteur
Mxy désigne la mutuelle entre l’enroulement x et y
On considère un repère d,q dont l’axe d est aligné sur l’axe polaire.
Vbs
bs
Vas
as
cs
Vcs
d
Vf
r
VQ
q
VD
if
iD
iQ
La transformation T
dq0/abc associée à ce changement de repère est appelée
transformation de Park

2
Introduction
La variation de vitesse d’une machine synchrone est obtenue par le réglage de la
fréquence d’alimentation. La fréquence de commutation du convertisseur
statique assurant l’alimentation de la machine est asservie à la vitesse du rotor. De
plus, les impulsions des convertisseurs sont synchronisées sur la position du
rotor de manière à assurer un angle constant entre induction statorique et
rotorique. Cette commande constitue l’autopilotage. Cela assure la stabilité et
donne à l’ensemble du système convertisseur-machine, un fonctionnement
proche de celui d’une machine à courant.
La machine synchrone peut être alimentée par un convertisseur de tension ou de
courant. La source doit être reversible pour un fonctionnement dans les quatre
quadrants (moteur/ générateur dans les deux sens de rotation).
Dans le cas d’une alimentation en courant, la commutation peut être naturelle ( le
courant doit alors être en avance sur la tension. Pour faciliter ce mode de
fonctionnement, la machine doit être surexcitée). Elle peut être aussi forcée. Par
exemple, au démarrage, les f.e.m. ne sont pas suffisantes pour permettre
l’extinction des thyristors.
L’alimentation de la machine doit être adaptée aux caractéristiques de celle-ci.
Ainsi, il sera préféré une alimentation en créneaux de courant dans le cas d’une
machine qui, lorsque deux de ses phases sont alimentées en série par un courant
constant, possède une courbe Te(θm) de forme trapézoïdale (moteur synchrone à
aimants sans pièces polaires). Cette alimentation minimise les ondulations de
couple (la superposition des courbes Te(θm) lors des différentes séquences de
fonctionnement donne une courbe de couple pratiquement constant).
Le tableau suivant rappelle les différents types de machines concernées par ces
applications et leurs caractéristiques essentielles. Pour clarifier l’exposé, nous
nous restreindrons aux actionneurs suivants :

3
Type Caractéristiques Description
Machine
synchrone à
rotor bobiné et
entrefer lisse
Lds=Lqs A+
B
+
C+
A
-
B-
C-
SN
Machine
synchrone à
rotor bobiné et
pôles saillants
Lds>Lqs
effet de saillance ⇒
augmentation de Temax A+
C+
B-
B+
B-
A-C-A+
C+
A-
B+
C-
N
N
S S
Machine
synchrone à
aimants montés
en surface du
rotor
sans pièce
polaire
Lds≈Lqs
grand entrefer
Pour un angle polaire θ=120°
(électrique), lorsque deux des
phases de la machine sont
alimentées en série par un
courant constant, Te(Θ
m
) a une
forme trapézoïdale[LAJOIE-
MAZENC 95].
N
SN
S
NS
N
S
θ
Machine
synchrone à
aimants enterrés
au rotor
Saillance inversée Lqs>Lds
Possibilité de vitesses de
rotation élevées NN
S
S
NN
S
S
Tableau 1. - Machines synchrones.

4
Mise en équation
Pulsation statorique
ω
ω
em
=
Expression des flux
Ψ
Ψ
Ψ
Ψ
Ψ
Ψ
a
b
c
f
D
Q
a ab ac af aD aQ
ba b bc bf bD bQ
ca cb ccf cD cQ
fa fb fc ffD
Da Db Dc Df D
Qa Qb QC Q
a
b
c
f
D
Q
LM M M M M
MLM M M M
M M LM M M
M M M LM
M M M M L
M M M L
i
i
i
i
i
i
=
0
0
0 0
Cette équation peut s’écrire :
[
]
[
]
Ψabc sabc sr fDQ
LiMi= +
[
]
[
]
ΨfDQ sr
t
abc fDQ fDQ
MiLi= +
Les paramètres inductifs du rotor sont indépendants de la position angulaire du
rotor puisque la face interne du stator est lisse.
Lf, LD, Lq et Mfd sont donc constants.
Tous les autres paramètres dépendent de θr. L’hypothèse de répartition spatiale
sinusoïdale des forces magnétomotrices permet d’écrire :
(
)
Ll l
as s r
= +
1 2 2cos θ
Ll l
bs s r
= + −
1 2 22
3
cos θπ
Ll l
cs s r
= + +
1 2 22
3
cos θπ

5
M M M
ab s s r
= + −
1 2 23
cos θπ
M M M
bc s s r
= + − −
1 2 23
2
3
cos θπ π
M M M
ca s s r
= + − +
1 2 23
2
3
cos θπ π
(
)
M M
af sf r
=cos θ
M M
bf sf r
= −
cos θπ23
M M
cf sf r
= +
cos θπ23
(
)
M M
aD sD r
=cos θ
M M
bD sD r
= −
cos θπ23
M M
cD sD r
= +
cos θπ2
3
(
)
M M
aQ sQ r
=sin θ
M M
bQ sQ r
= −
sin θπ23
M M
cQ sQ r
= +
sin θπ2
3
Simplification de la matrice d’inductance par application de la
transformation de Park
Tranformation de Park :
T T RT
a dq abc abc
r r r
r r r
= = =
− +
− − − − +
0 0 2
3
2323
2323
1
21
21
2
/ /
cos cos( )cos( )
sin sin( )sin(
θαβ
θ θ πθπ
θ θ πθπ
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%